一種改進霍夫梯度變換的紗籠坐標檢測方法研究
2022-10-12 05:59:00冉宇辰王文勝李天劍
機械設計與制造 2022年10期
冉宇辰,黃 民,王文勝,李天劍
(北京信息科技大學機電工程學院,北京 100192)
1 引言
近年來應用在各類制造生產線上的工業機器人已比較成熟,但其在紡織行業的應用還有很大拓展空間[1-2]。隨著生產需求量的增加,為提高工作效率,染整車間紗籠的坐標檢測工作突顯的更為重要,其重心就是要測量出紗籠上每一根紗桿的頂端圓心坐標距紗桿基準中心的偏離程度,即紗桿在紗籠上的垂直度。
通過偏離數據對超出許用范圍的紗桿進行相應校正,偏離距離越大,裝紗和卸紗的時間就越長,準確性就越低,單個紗籠出現問題還會影響后續車間工作的進行,嚴重的話還可能會造成安全事故。
目前,紗籠坐標檢測工作全部是由工人手動完成,工人需要通過激光和外部工具以及自身經驗對偏離數據進行測量記錄,這種原始的檢測方法,測量過程長,效率低,勞動量大,且測量數據的準確性無法驗證。因此,亟待設計一套完整的機器人檢測系統,提高工作效率,滿足實際生產需求。
這里指在通過機器視覺的方法來實現紗籠坐標的檢測[3-4]。紗籠上紗桿坐標定位的關鍵是通過圖像處理提取出紗桿頂端的中心坐標。紗桿頂端近似為圓環,可通過檢測圓的方法進行測量,一般有Hough變換法、連通域法、最小二乘法等。
標準Hough法對于規則圓的檢測效果好、抗干擾性好,應用不同領域發展出多種改進方法[5-7],但仍存在產生大量無效累積、數字化量化誤差大等問題,因此同Hough法相結合的方法相繼問世,文獻[8]提出基于隨機Hough變換的結合方法,借助特征弦的幾何約束及特征弦端點的法向約束,大幅度降低RHT的無效采樣和累積次數;文獻[9-10]提出基于梯度Hough變換的結合方法,前者把像素為主體的投票方式簡化為一維參數累積,結合最小二乘擬合,極大地提高了圓檢測的速度,使得魯棒性和可靠性有保障,后者采用Teaching Learning Based Optimization(TLBO)算法,基于元啟發式算法,利用梯度信息更精確地確定待測圓形。連通域法當圖像區域單一時檢測速度快且精度較高,但它的抗干擾性較差,對圖像質量要求高[11];最小二乘法精度高、速度快,但對圖像邊緣質量要求較高[12]。
這里提出了基于連通域法和Hough梯度法相結合的視覺算法,是一種改進的霍夫梯度變換方法,通過工業相機對紗籠上每一根紗桿頂端圓心坐標的精確定位,獲得上位機的坐標偏離度數據,以校正存在問題的紗桿,節省數據采集時間,簡化紗籠檢測過程。
2 視覺算法
2.1 傳統檢測方法
考慮到紗桿頂端平面為圓環形狀,可近似看作圓形進行檢測。傳統檢測方法中Hough梯度法通過梯度方向的計算可以更精確地擬合出紗桿頂端平面的近似圓,連通域法的標記計算更加簡潔穩定。
2.1.1 Hough梯度法
Hough變換法是圖像處理中的一種特征提取技術,該過程在一個參數空間中通過計算累計結果的局部最大值得到一個符合該特定形狀的集合作為霍夫變換結果。
圓的一般方程,如式(1)所示。

所以需要三個參數表示一個圓,C:(xcenter,ycenter,r)。
開源計算機視覺庫(Open Source Computer Vision Library,OpenCV)內部提供了一個基于Hough變換理論的找圓算法,稱為Hough梯度法。通過計算輪廓點處的梯度向量,然后根據搜索的半徑R在該梯度方向距離輪廓點距離R的兩邊各投一點,最后根據投票結果圖確定圓心位置。
經過實驗測試,光線較弱時,背景噪聲造成的干擾較大,在光線比較強的情況下,該方法識別準確率有所提高,背景噪聲對尋找最優半徑產生的影響不大,但穩定性較低。這種方法會導致識別出的圓形易抖動,誤差較大,也有可能無法識別出待測區域,或者識別出多個圓形,甚至是不存在的圓。
2.1.2 連通域法
連通域方法的原理:一幅圖像二值化處理后往往包含多個區域,需要通過標記把它們分別提取出來。標記分割后圖像中各區域的簡單而有效的方法是檢查各像素與其相鄰像素的連通性。在二值圖像中,背景區像素的值為0,目標區域的像素值為1,對圖像進行逐像素掃描,即可保證所有的連通域都被標記出來。后再通過對不同的標記賦予不同的顏色或將其加上邊框即可完成標記,通過設定的參數,篩選出滿足條件的區域,求其質心坐標。
連通域法檢測時,需保證待測區域能夠有效的連接成一個封閉區域,但實際生產中,紗籠上的紗桿經長時間使用會產生腐蝕、斷裂等機械磨損現象,輕度的磨損可通過特征提取等方式進行改善,而重度的磨損無法通過圖像處理的方法得到連通區域。
2.2 連通域與Hough梯度結合法
以連通域方法為基礎,添加Hough梯度法中高斯濾波與膨脹腐蝕的圖像處理方式,以達到增強特征提取效果的目的,具體流程,如圖1所示。
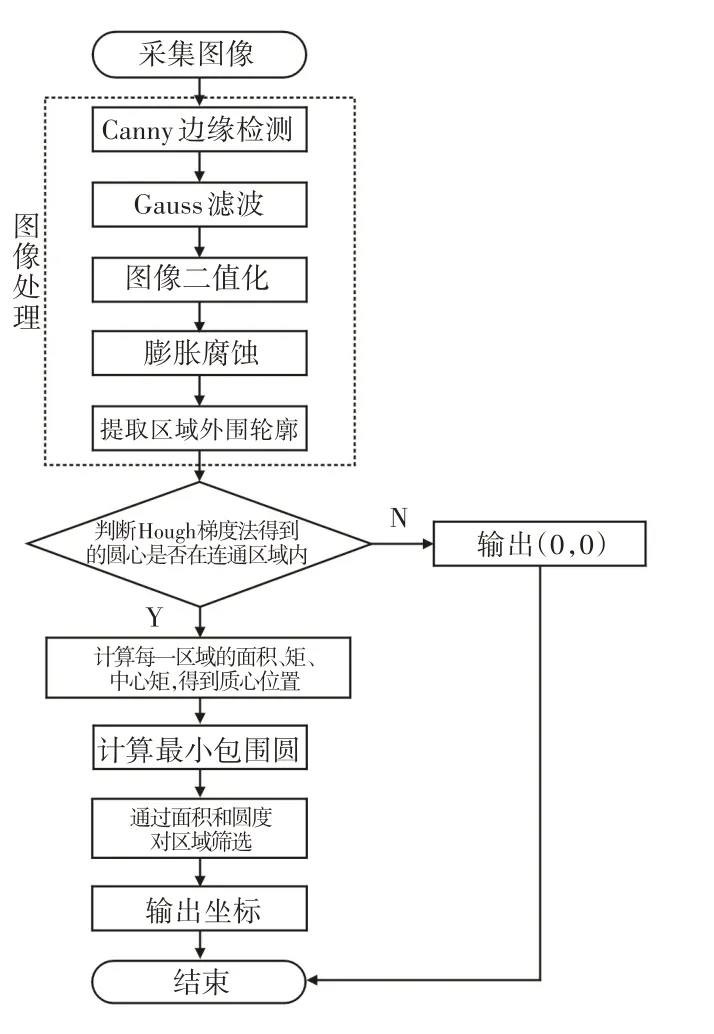
圖1 連通域與Hough梯度結合法流程Fig.1 Connected Domain and Hough Gradient Combination Process
Canny邊緣檢測后得到二值圖,為了盡可能減少噪聲對邊緣檢測結果的影響,所以必須濾除噪聲以防止由噪聲引起的錯誤檢測。通過高斯濾波的方法,使用高斯濾波器與圖像進行卷積,可以很好的平滑圖像,以減少邊緣檢測器上明顯的噪聲影響。二維高斯函數,如式(2)所示。

其中,參數σ決定了高斯函數的寬度,而高斯卷積核大小的選擇將影響Canny檢測器的性能。尺寸越大,檢測器對噪聲的敏感度越低,但是邊緣檢測的定位誤差也將略有增加。因此選用標準參數σ=1.4,高斯濾波器內核大小為(5×5)。
在對圖像進行高斯濾波后,進行全局二值化處理,由于紗籠和紗桿是由同一種材料構成,閾值化類型表達式,如式(2)所示。

利用形態學的膨脹(dilate)和腐蝕(erode)操作提取邊界,由于紗桿底端用來輔助固定筒子紗的圓盤上有波浪形的圓環,光線照射會發生漫反射,且圓盤形狀與待測區域形狀極為相似,如圖2所示。
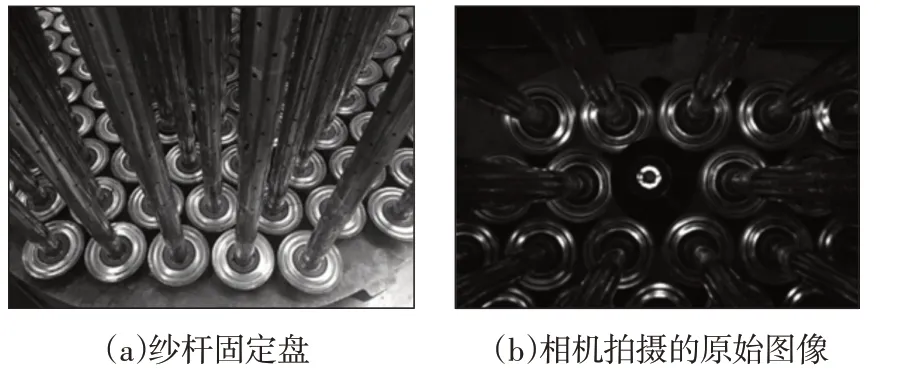
圖2 背景干擾Fig.2 Background Interference
此過程一方面可以去除高斯濾波后包含在目標區域內剩余的小顆粒噪聲,一方面可以去除由待測物體在使用過程中產生的腐蝕、斷裂等機械磨損現象導致的區域不連通的情況,將二值圖中存在細微斷裂的區域連接起來,填補目標區域中存在的空洞,減少后續計算的潛在錯誤。由于背景干擾有大有小,所以核的選取適中即可,設定內核大小為(3×3)。
膨脹方法,如式(4)所示。

腐蝕方法,如式(5)所示。

經過邊緣檢測算子處理過的二值圖像,即可得到完整的圖像連通區域,獲得k個區域,如圖3所示。膨脹腐蝕提取后的圖像非常連貫且平滑,相比于Hough梯度法輸出的二值圖,圓形特征更加明顯,噪聲干擾更小,再通過結合法對平滑后的圖像進行填充,增強連通區域的特征,便于后續對二值圖的使用。
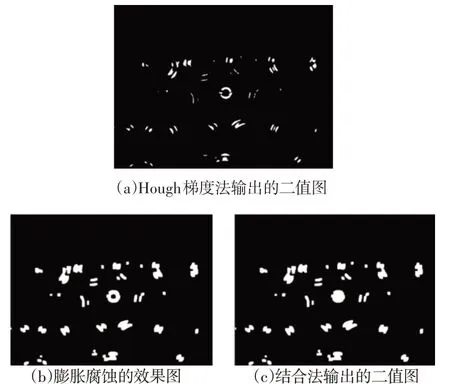
圖3 Hough梯度法與結合法二值圖效果對比Fig.3 Comparison of the Effect of Binary Graph of Hough Gradient Method and Combined Method
檢測每一個連通區域的最外圍輪廓,忽略內層的輪廓,保存輪廓上拐點信息,再將其進行填充,計算每一連通區域的面積Sk圖像,判斷Hough梯度法得到的圓心是否在連通區域Lk內。
對輪廓圖像中的每一個非零點()xi,yi,用Sobel算子計算梯度。該算子包含兩組(3×3)的矩陣,分別為橫向卷積因子Fx及縱向卷積因子Fy,將之與圖像作平面卷積,即可分別得出橫向及縱向邊緣檢測的圖像灰度值Gx、Gy。
*—卷積;A—輸入圖像。
計算梯度方向θ,如式(8)所示。

計算梯度G,如式(9)所示。

遍歷輪廓圖中的非0點,沿著梯度方向和反方向畫線段,線段的起點和長度由參數允許的半徑區間決定,將線段經過的點在累加器中記數,按照降序排列,選擇最優的候選中心。
接下來計算每一個中心所有輪廓圖中的非0點離圓心的距離,并從小到大排序。從最小半徑開始計算到最大半徑,距離相差在一個小量范圍內的點,都認為是同一個圓,記數屬于該半徑r的非0點數,記為n。依據點的線密度計算式(10)所示:

密度越高,半徑的可信度越大,那么最優半徑的中心得到最充分支持,從而獲取圓心坐標(xH,yH)。若Hough梯度法得到的圓心坐標()xH,yH不在某一連通區域L0內,則說明視覺識別出的圖像只為實際紗桿端面的一部分,紗桿桿頭可能存在損壞嚴重的現象,不能繼續使用,輸出坐標信息若為(0,0),則需要對該紗桿進行安全檢查。
若Hough梯度法得到的圓心坐標()xH,yH在某一連通區域L0內,則計算每一個連通區域Lk的矩、中心矩以及質心坐標。
一階矩計算,如式(11)所示。

中心矩計算,如式(12)所示。

質心,如式(13)、式(14)所示。

其中,P(i,j)為圖像在坐標點(i,j)處的灰度值,由于所求區域為均勻分布,近似為規則圓形,所以求出的質心坐標(xk,yk)即可表示為待測區域的中心坐標。
最后,將圓度值和區域面積的大小作為篩選滿足條件區域的最終判據。遍歷區域輪廓的點,迭代找出最左邊、最右邊、最上邊、最下邊的四個點,求出包圍這四個點的最小圓Ck的圓心和半徑Rk。通過檢測區域Lk的圓度判斷待檢測的對象是否為圓形,其數學公式,如式(15)所示。

式中:lk—區域輪廓的周長,Dk的大小越接近1,那么待檢測區域越接近圓形,當Dk=1時,檢測區域是標準的圓形。
一方面,視覺相機與紗桿頂面的距離可通過Z坐標調整控制在(200~300)mm之間,相機距離紗桿越近,采集到的紗桿頂端圖像就會大,待檢測的區域面積就會越大,反之亦然,所以區域面積的閾值范圍設定在(700~3000)像素之間;另一方面,經過圖像預處理后的待檢測區域仍會輕度的畸變,只能近似的看作圓形,所以圓度的閾值大于0.75。對篩選后的質心坐標進行排序,這里最多只能得到一組坐標,輸出第一組坐標()x0,y0即為所求紗桿頂端圓心坐標。
經過實驗測試,連通域與Hough梯度法相結合的方法可以非常準確的給出坐標信息,不會出現檢測結果不穩定的現象,配合膨脹腐蝕的方法,可以減少外部環境產生的干擾。
3 實驗
3.1 紗籠坐標檢測機器人系統結構
機器人的主體結構設計為門架式結構,如圖4所示。可實現X軸、Y軸、Z軸和A軸四坐標運動控制,Z軸搭載筒子紗自動裝卸手爪機構,側面安裝視覺系統,紗籠回轉工位A軸采用回轉支撐結構,用于染紗過程旋轉紗籠。染整車間紗籠由120 根紗桿組成,紗桿的安放位置設計成等邊三角形排列,每根紗桿之間相距170mm,紗桿高度1500mm,紗桿頂端平面圓直徑7mm,有直徑5mm螺紋孔。視覺系統,如圖5所示。

圖4 機器人結構和紗籠Fig.4 Robot Structure and Sarong

圖5 視覺相機和環形光源放大圖Fig.5 Enlarged View of Vision Camera and Ring Light Source
采用大恒圖像水星系列GigE數字攝像機,是一款工業相機,型號MER-032-120GM-P,分辨率656(H)×492(V),幀率120fps,焦距8mm。相機配有一個環形光源,亮度(30000~35000)LUX以上,可增強檢測平面的亮度,同時弱化其他背景的干擾程度。為了獲得更高的分辨率,相機鏡頭會盡可能的靠近所檢測的物體,但過近的距離也會導致透視失真,相機鏡頭會因畸變導致像差,同時為保證視場范圍內只有一根完整的紗桿出現,設定檢測對象到相機鏡頭距離為(200~300)mm。現場采用ProfiNET總線連接伺服電機,通過西門子S7-1200系列PLC控制器,實現對三坐標軸的實時控制,通過工業以太網連接觸摸屏上的人機交互界面和視覺系統,使用OPC 通訊協議實現人機信息交互及系統間通訊,控制系統硬件組成,如圖6 所示。
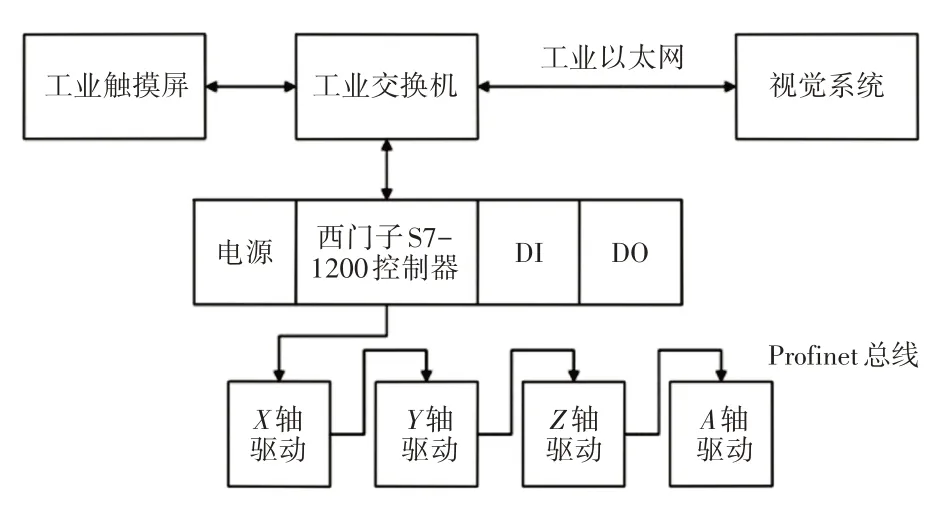
圖6 控制系統硬件組成Fig.6 Control System Hardware Composition
3.2 測試
機器人系統設計之初,為將工作效率達到最高,擬采用將攝像頭一次拍攝一個完整紗籠的方式,把相機放置在紗桿桿頂平面上方較遠的位置,即在一張圖片上呈現出整個紗籠120根紗桿的頂端圓心坐標。每運送來一個紗籠,就可以一次性的顯示出該紗籠上所有紗桿的測量數據。這種方案時間短,效率高,但不能保證每一根紗桿的頂端圓心坐標都能準確識別出來,且紗桿與坐標的對應關系建立較為復雜,若有紗桿識別不出來的情況出現,則容易使測量系統發生錯誤。因此,為保證測量數據的準確性,采用逐桿檢測的方式。
首先,現場隨機運送來一個無紗的紗籠,把大恒相機、環形光源以及西門子PLC 等硬件設備通過交換機連接到PC 機并設置IP,使其能夠在同一IP段,軟件系統成功連接相機和PLC。
其次,設定機器人Z軸坐標,測試過程中保持不變,調節相機焦距與光源亮度,盡可能的減少外部環境帶來的干擾,主要是由紗桿底盤造成的干擾。
然后,通過人機交互界面正常啟動相機并采集圖像,與PLC正常通訊并能進行讀寫數據,同時能完成一整個紗籠的坐標檢測工作,獲得輸出結果。將輸出的坐標信息與紗桿圓心坐標的基準值作對比,得到紗桿偏離度數據,即方向和距離。
每一根紗桿的圖像采集只需(200~300)ms,一個紗籠運行完整的坐標檢測功能只需約6min,相比于人工檢測大大節省了工作時間和勞動量,提高了檢測效率。
針對當前環境,相機焦距3.8mm,光強40%,采集到的實驗圖像,如圖7所示。此根紗桿經過長期使用,桿頭已經出現明顯的磨損,通過對比可以看出,Hough梯度法雖然能準確地識別出待測區域,但會把近似圓形的背景噪聲也當作待測區域,從而獲得兩個圓形,影響坐標值的準確性。由于待測區域不連通,連通域法無法準確識別,從而沒有坐標值輸出。結合法能夠更穩定的識別出待測區域,不會被背景噪聲和桿頭磨損等因素影響,魯棒性更好。
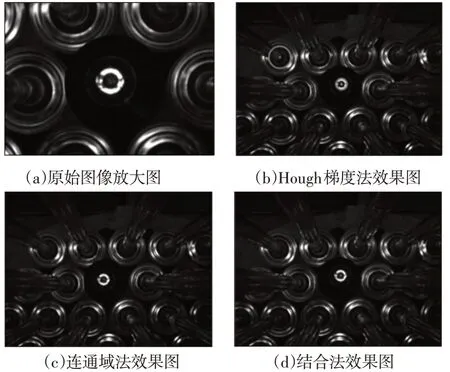
圖7 Hough梯度法、連通域法與結合法效果對比Fig.7 Comparison of Hough Gradient Method,Connected Domain Method and Combination Method
改變現場環境,進一步對視覺系統進行測試,調節光照強度和相機焦距,如圖8所示。均能準確識別出待測區域。
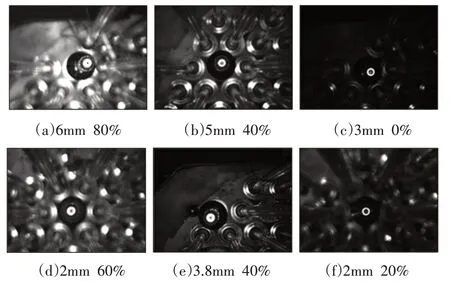
圖8 現場不同相機焦距和光照強度下的測試結果Fig.8 Test Results at Different Camera Focal Lengths and Light Intensities
上位機顯示的人機交互界面,如圖9所示。各部分代表的意義如下:
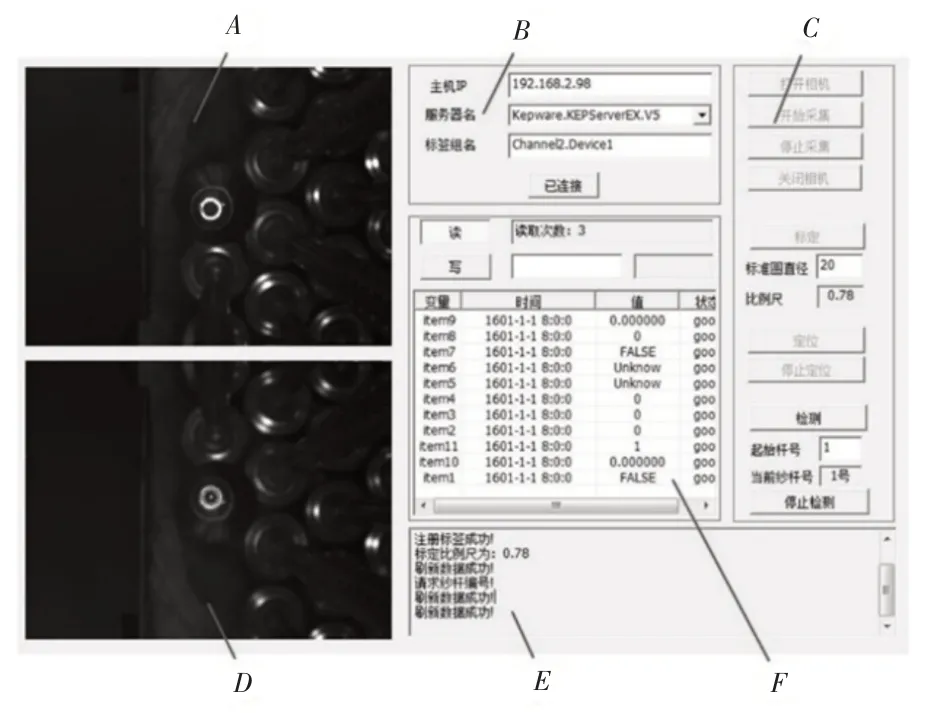
圖9 人機交互界面Fig.9 Human-Computer Interaction Interface
(1)視覺相機采集到的原始圖像。
(2)連接部分,設置IP地址,同KEPServerEX軟件相連接。
(3)主控制窗口,控制相機采集,選擇視覺程序執行標定、定位和檢測的功能。
(4)視覺程序處理后的效果圖。
(5)程序運行時的消息響應窗口,刷新數據信息。
(6)讀寫PLC中的數據,顯示其變量名稱、時間、值和狀態。
3.3 誤差分析
由于紗桿高度1500mm,紗桿的頂端圓面直徑為7mm,所以紗桿桿頭偏移量不能太大,過大在實際生產中易產生危險,影響正常工作,圓心坐標的許用誤差為±10mm,應控制坐標誤差在1mm以內。
對機器人系統進行誤差分析,隨機選擇一根紗桿,控制機器人運行至其基準坐標,進行數據采集。保持X軸坐標不變,機器人沿Y軸每次運動1mm距離,記錄視覺程序輸出的坐標信息,該坐標的X值應保持不變,Y值對應運動1個比例尺的距離。如圖10(a)所示。X坐標值在11.52到11.73范圍內波動,近似一條直線,由機械振動產生的誤差控制在0.3個像素內,可忽略不計;Y坐標值在點(11.73,69.36)處有輕微浮動,但整體近似呈線性增長,證明視覺相機的檢測結果基本不會因檢測區域的移動而產生畸變。同理,Y軸坐標不變,機器人沿X軸每次運動1mm距離的數據,如圖10(b)所示。因此,這里提出的機器人系統對坐標定位準確。
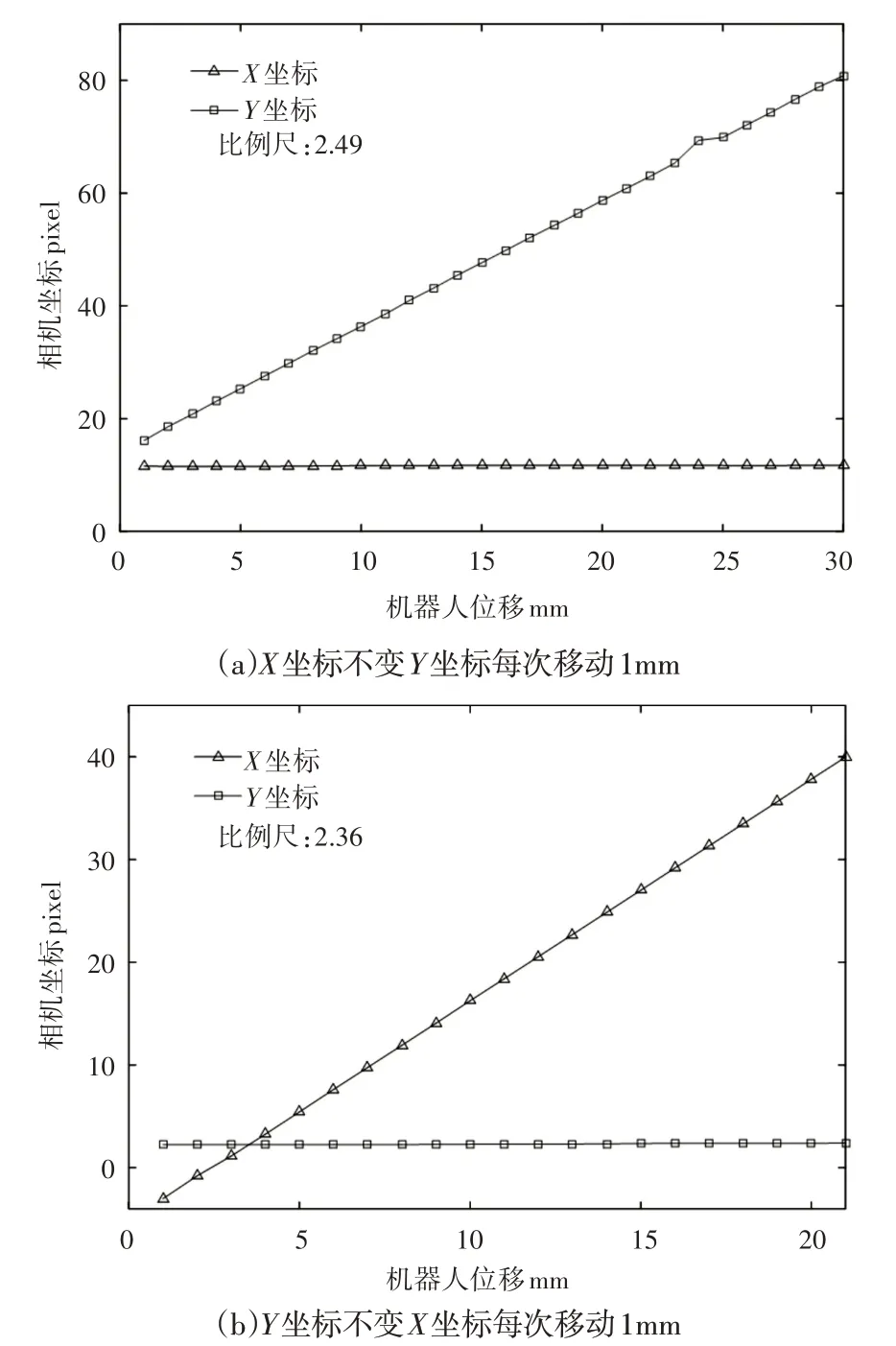
圖10 機器人系統誤差分析Fig.10 Robot System Error Analysis
對檢測數據精度進行分析,抽取10個紗籠,對每個紗籠進行視覺檢測程序,計算坐標偏離度數據,得出每個紗籠檢測坐標的均值,均方差值,如圖11(a)所示。在X方向上波動微小,較為穩定,誤差限制在0.25%以內;如圖11(b)所示。在Y方向上誤差有起伏,相對X方向較大,但均能保持在1mm 以內,精確值可以達到95%。
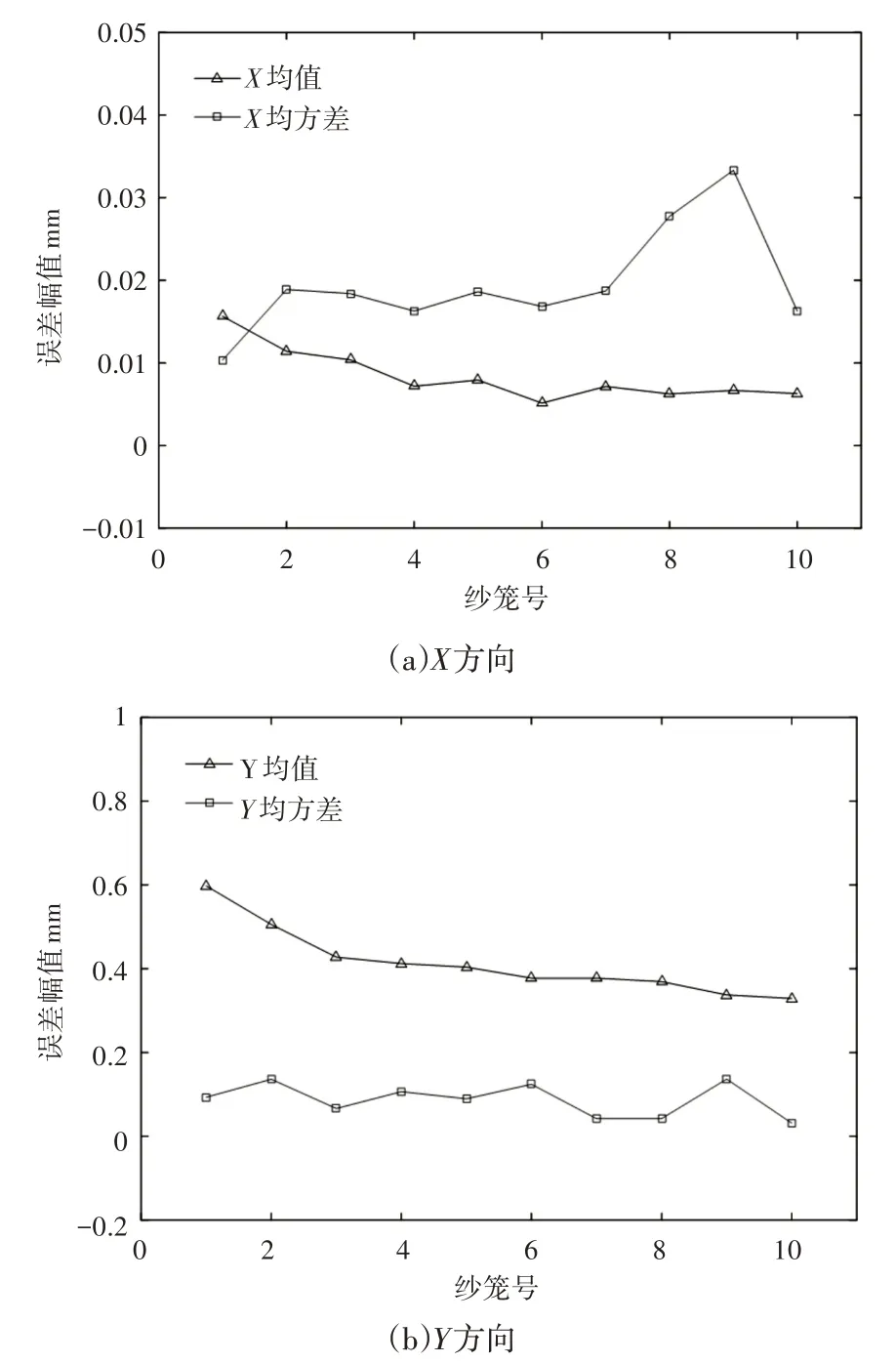
圖11 機器人系統精度分析Fig.11 Robot System Accuracy Analysis
3.4 結果分析
在相同環境下對Hough梯度法與結合法的檢測結果對比,如表1所示。

表1 Hough梯度法與結合法檢測結果對比Tab.1 Comparison of Two Methods
通過上述實驗可以看出,背景噪聲干擾對Hough梯度法造成很大負面影響,雖然識別率還算可觀,但識別效果的準確性只能達到一半,并且輸出的坐標值波動性較大,計算出的偏離數據不能正常使用。除個別桿頭磨損非常嚴重已需要更換的紗桿外,結合法可以有效降低外部環境造成的背景干擾和數據波動,更準確地識別出紗籠上每一根紗桿的坐標,檢測結果能夠達到工人手動測量的精確性,并且數據穩定,能夠適應不同光照強度以及相機焦距的改變。
4 結論
這里提出的結合連通域和Hough梯度的頂端圓檢測方法,是一種改進的霍夫梯度變換方法,通過高斯濾波和膨脹腐蝕的圖像處理方式把二值圖的特征更好地提取出來,使待測區域更加清晰,避免了背景噪聲的干擾,梯度計算的補充使得磨損桿頭也能準確識別。本次實驗通過對10個紗籠的測試,1200根紗桿的圖像采集,驗證了基于機器視覺的結合法能快速并且穩定地給出紗桿頂端圓心坐標,完成一個紗籠的坐標檢測只需6min,通過誤差和結果分析,坐標信息的誤差限制在1mm以內時,其準確率和穩定性能夠達到95%。視覺算法搭配運動控制系統,組成的機器人系統,可以代替工人手動檢測,有效節省數據采集時間,大大提高檢測效率,滿足工場實際檢測需要,同時可以應用擴展到背景噪聲干擾復雜的檢測圓心坐標的其他領域,實現相似的功能。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44