神經(jīng)元活性引導(dǎo)機器人脫困的全覆蓋路徑規(guī)劃
2022-06-28 09:38:32江靜嵐
機械設(shè)計與制造 2022年6期
江靜嵐
(柳州鐵道職業(yè)技術(shù)學(xué)院,廣西 柳州 545616)
1 引言
移動機器人導(dǎo)航包括地圖創(chuàng)建、路徑規(guī)劃與跟蹤控制等方面,路徑規(guī)劃分為點對點規(guī)劃和全覆蓋規(guī)劃兩類。全覆蓋機器人廣泛應(yīng)用于除草、掃地、噴涂等行業(yè)和領(lǐng)域,要求對工作區(qū)域遍歷的同時重復(fù)覆蓋率較低[1]。研究機器人全區(qū)域覆蓋方法,對提高機器人工作效率和降低機器人能耗意義明顯。
機器人工作區(qū)域全覆蓋方法可以分為三類,分別為傳統(tǒng)覆蓋方法、基于區(qū)域分解覆蓋方法、基于柵格地圖覆蓋方法。傳統(tǒng)覆蓋方法包括模板法和內(nèi)螺旋法,模板法根據(jù)環(huán)境特征預(yù)先設(shè)定運動模板,機器人進行環(huán)境匹配后根據(jù)此模板運動[2],此方法能夠完成遍歷,但是要求環(huán)境不能發(fā)生任何變化,應(yīng)用范圍極小。內(nèi)螺旋法是一種沿邊法[3],當(dāng)遇到已覆蓋區(qū)域或邊界時則內(nèi)旋一個單位繼續(xù)工作,此方法對環(huán)境精度要求極高,且難以實現(xiàn)完全覆蓋。基于區(qū)域分解的覆蓋方法是根據(jù)障礙物形狀將工作區(qū)域進行劃分,子工作區(qū)域內(nèi)沒有障礙物,而后對設(shè)定子區(qū)域遍歷法、子區(qū)域遍歷順序等,包括牛耕分解法[4]、矩形分解法[5]等。基于柵格地圖覆蓋方法包括生成樹法、生物激勵神經(jīng)網(wǎng)絡(luò)法等,生成樹法[6]將每四個柵格合成一個單元,通過全部單元連接實現(xiàn)遍歷,此方法需要極大的存儲空間且路徑轉(zhuǎn)彎較多;生物激勵神經(jīng)網(wǎng)絡(luò)算法[7]中神經(jīng)元使用分流方程與相鄰神經(jīng)元交流,根據(jù)神經(jīng)元活性值選擇下一柵格,此方法計算簡單,無需學(xué)習(xí)過程,其最大缺陷是存在“死區(qū)”問題。
這里為了解決生物激勵神經(jīng)網(wǎng)絡(luò)算法存在的死區(qū)問題,使機器人高效地完成工作區(qū)域全覆蓋,提出了脫困點搜索和脫困點路徑規(guī)劃方法。制定了元胞自動機演化規(guī)則,搜索到了最佳脫困點;使用神經(jīng)元活性值引導(dǎo)RRT算法,使隨機樹擴展具有方向性,完成了脫困路徑規(guī)劃。帶有脫困機制的生物激勵神經(jīng)網(wǎng)絡(luò)算法能夠有效完成工作區(qū)域全覆蓋,是一種有效的遍歷路徑規(guī)劃方法。
2 生物激勵神經(jīng)網(wǎng)絡(luò)全覆蓋方法
2.1 柵格環(huán)境模型
使用生物激勵神經(jīng)網(wǎng)絡(luò)算法進行全區(qū)域覆蓋規(guī)劃時,首先需要建立工作區(qū)域的柵格模型。使用方形柵格對工作區(qū)域進行分割,當(dāng)柵格內(nèi)不存在障礙物時稱為自由柵格,當(dāng)柵格內(nèi)存在障礙物時稱為障礙物柵格,另外自由柵格需要區(qū)分已覆蓋柵格和未覆蓋柵格。通過對柵格賦不同屬性值,使機器人能夠識別以上3類柵格,對障礙物柵格賦值為“-1”,對已覆蓋柵格賦值為“0”,對未覆蓋柵格賦值為“1”。機器人某次規(guī)劃過程,如圖1所示。其對應(yīng)點陣為:
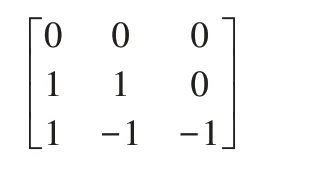
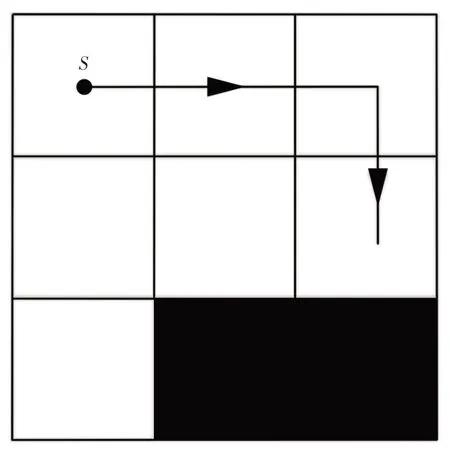
圖1 機器人某次規(guī)劃過程Fig.1 A Planning Process of Robot
柵格法的編碼方法包括直角坐標(biāo)法和順序編碼法,相互轉(zhuǎn)換關(guān)系可參考文獻[8],此內(nèi)容非本文重點,這里不再贅述。另外,方形柵格法包括“四叉樹法”和“八叉樹法”,本文使用的是“八叉樹法”。
2.2 生物激勵神經(jīng)網(wǎng)絡(luò)
使用柵格法將工作區(qū)域離散化,每個柵格對應(yīng)一個神經(jīng)元,柵格屬性值即為神經(jīng)元初始活性值。二維的生物激勵神經(jīng)網(wǎng)絡(luò)模型,如圖2所示。每個神經(jīng)元與周圍相鄰神經(jīng)元相互連接,實現(xiàn)神經(jīng)元活性相互影響與傳遞。

圖2 二維生物激勵神經(jīng)網(wǎng)絡(luò)模型Fig.2 2-Dimention Biologically Inspired Neural Network Model
神經(jīng)元活性值由分流方程描述外部激勵及相互間作用關(guān)系[9],為:

式中:uk—第k個神經(jīng)元活性值;RB—活性值衰減速率,是一個正值常數(shù);UB、LB—活性值上下限;m—神經(jīng)網(wǎng)絡(luò)中神經(jīng)元k的相鄰柵格數(shù);wkl—神經(jīng)元k與神經(jīng)元l的權(quán)值,權(quán)值矩陣具有對稱性,即wkl=wlk;函數(shù)外部輸入信號,當(dāng)Ik>0時Ik為激勵信號,當(dāng)Ik<0時Ik為抑制信號。根據(jù)不同柵格類型,為Ik設(shè)置不同值,即:
式中:EB?UB—外部輸入值。
神經(jīng)元k與神經(jīng)元l之間的連接權(quán)值wkl定義為兩者歐式距離的遞減函數(shù),這里設(shè)置為:

式中:μ—一個常數(shù),取值范圍為0 <μ<1。
分析式(1)可知,對于未覆蓋區(qū)域,正的活性值可以通過分流方程不斷擴散,在全局范圍內(nèi)對機器人產(chǎn)生吸力;而對于障礙物區(qū)域,負(fù)的活性值不參與分流方程,只受外部輸入的作用,因此對機器人沒有任何吸引作用,達(dá)到避障目的。
機器人轉(zhuǎn)彎不僅降低工作效率,同時增加了磨損降低機器人使用壽命。為了減少機器人轉(zhuǎn)彎次數(shù),將轉(zhuǎn)彎角度加入到活性值中,作為一項選擇指標(biāo),即:

式中:Pathk—神經(jīng)元k選擇的路徑;η—方向權(quán)值,(1)調(diào)節(jié)活性值與轉(zhuǎn)向角處于同一數(shù)量級,(2)調(diào)節(jié)轉(zhuǎn)向約束重要性;Δθl—選擇相鄰神經(jīng)元l的轉(zhuǎn)向角,由式(3)可知轉(zhuǎn)向角越大則被選概率越小,是為了保證機器人直線行駛,提高行走效率;(xl,yl)—下一時刻神經(jīng)元l的位置,(xc,yc)—機器人當(dāng)前時刻神經(jīng)元位置,(xp,yp)—上一時刻神經(jīng)元位置。
2.3 生物激勵神經(jīng)網(wǎng)絡(luò)全覆蓋原理及缺陷分析
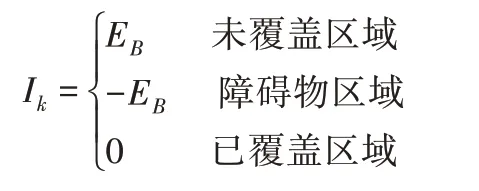
根據(jù)前文生物激勵神經(jīng)網(wǎng)絡(luò)工作原理,制定全覆蓋路徑規(guī)劃過程為:首先根據(jù)柵格法建立工作環(huán)境模型,為每個神經(jīng)元賦初始活性值。從起始點開始規(guī)劃,每走過一個柵格將其屬性活性值強制設(shè)置為0,而后依據(jù)式(1)進行活性值更新。路徑規(guī)劃過程中,障礙物神經(jīng)元不進行活性值更新,只對自由神經(jīng)元活性值更新。機器人每前進一步,則按照式(1)對自由神經(jīng)元進行一次活性值更新,按照式(3)選擇相鄰柵格中最大值作為下一柵格,直至結(jié)束。對于某一工作環(huán)境,按照生物激勵神經(jīng)網(wǎng)絡(luò)全覆蓋規(guī)劃方法,得到的覆蓋結(jié)果,如圖3(a)所示,此時神經(jīng)元活性值,如圖3(b)所示。
圖3 生物激勵神經(jīng)網(wǎng)絡(luò)規(guī)劃結(jié)果Fig.3 Planning Resultant of Biologically Inspired Neural Network
圖3(a)中S點為路徑起始點,A點為終止點。從路徑規(guī)劃結(jié)果看,生物激勵神經(jīng)網(wǎng)絡(luò)算法陷入了“死區(qū)”問題,死區(qū)問題是指機器人周圍柵格不存在未覆蓋柵格,但是在整個區(qū)域中仍存在未覆蓋區(qū)域。圖3(b)中未覆蓋區(qū)域神經(jīng)元活性值較高,對機器人具有較強的吸引作用,但是機器人陷入“死區(qū)”無法完成遍歷。
3 脫困機制設(shè)計
為了解決生物激勵神經(jīng)網(wǎng)絡(luò)存在的“死區(qū)”問題,本節(jié)設(shè)計了機器人脫困機制,包括基于元胞自動機的脫困點搜索和改進RRT算法的脫困路徑規(guī)劃等兩方面內(nèi)容。
3.1 脫困點搜索
元胞自動機是模擬生物自復(fù)制現(xiàn)象提出的[10],元胞自動機系統(tǒng)定義在一個由有限狀態(tài)的元胞組成的離散空間中,給定元胞初始條件和演化規(guī)則,元胞就能夠根據(jù)演化規(guī)則自動迭代演化。元胞系統(tǒng)符號表達(dá)式為:

式中:M—元胞系統(tǒng);Ld—元胞空間,d—空間維度;S—元胞狀態(tài);N ={s1,s2,…,sn} —鄰居元胞集合;n—鄰居元胞數(shù)量;f—演化規(guī)則。
這里機器人工作空間為二維,因此元胞空間維度也為二維,即d=2。元胞狀態(tài)S取有限個離散狀態(tài),如{1 ,2,…,?} 。前文中指出,使用“八叉樹”方形柵格,每個元胞具有8個鄰居元胞,此時n=8。演化規(guī)則是元胞自動機系統(tǒng)的核心內(nèi)容,是所有元胞的狀態(tài)轉(zhuǎn)移函數(shù),直接決定了元胞下一時刻狀態(tài)。
首先為元胞自動機配置空間,也即元胞狀態(tài)初始化。在此需要強調(diào)的是,元胞位置與柵格位置(或神經(jīng)元位置)一一對應(yīng),但是元胞狀態(tài)值與神經(jīng)元活性值是沒有任何關(guān)聯(lián)的,存在于不同的知識系統(tǒng)中。根據(jù)不用的柵格類型,元胞初始狀態(tài)設(shè)置為:

在介紹元胞演化規(guī)則前,首先對中心元胞和鄰居元胞進行明確,按照柵格“八叉樹”法,處于中心位置的元胞為中心元胞,其周圍的8個元胞為鄰居元胞。根據(jù)搜索脫困點這一目標(biāo),制定元胞演化規(guī)則為:(1)首先查找狀態(tài)值為1的元胞,狀態(tài)更新從陷入死區(qū)位置元胞開始;(2)以死區(qū)元胞為中心元胞,將其鄰居元胞中狀態(tài)為0的元胞狀態(tài)更新為2;(3)以狀態(tài)值為2的元胞為中心元胞,將其鄰居元胞中狀態(tài)為0的元胞狀態(tài)更新為3;(4)而后分別以狀態(tài)為3的元胞為中心元胞、狀態(tài)為4的元胞為中心元胞,對其鄰居元胞進行更新,直至所有0元胞更新完畢。
從以上演化規(guī)則可以得到三點結(jié)論:(1)障礙物元胞的狀態(tài)值不更新;(2)障礙物元胞不作為中心元胞;(3)每個自由元胞只有一次狀態(tài)更新機會。按照以上演化規(guī)則,圖3(a)所示環(huán)境的元胞初始狀態(tài)值及更新狀態(tài)值,如圖4所示。
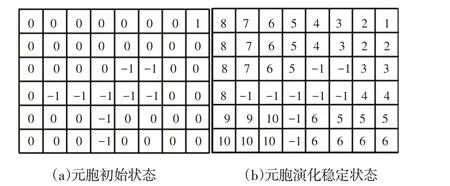
圖4 元胞自動機狀態(tài)演化Fig.4 State Evolution of Cellular Automata
圖中狀態(tài)值為1的元胞是機器人陷入死區(qū)的位置,彩色數(shù)字區(qū)域為機器人未覆蓋區(qū)域,未覆蓋區(qū)域中狀態(tài)最小的元胞位置即為機器人脫困點,也即圖4(b)中彩色9處的元胞位置。至此脫困點被找到,下節(jié)給出從死區(qū)位置到脫困點的路徑規(guī)劃方法。
3.2 改進RRT算法的脫困路徑規(guī)劃
快速擴展隨機樹(Rapidly-Exploring Random Tree,RRT)是一種在全局空間中隨機采樣、通過節(jié)點不斷擴展而連接起始點與目標(biāo)點的路徑規(guī)劃方法[11]。在二維規(guī)劃區(qū)域S?R2中,障礙物區(qū)域記為Sobs,自由區(qū)域記為Sfree,路徑規(guī)劃起點記為Pstart,目標(biāo)點記為Pend。RRT算法以起始點Pstart為根節(jié)點,在規(guī)劃區(qū)域內(nèi)使用隨機采樣法得到采樣點Prand,使用樹節(jié)點搜索的方法搜索到距離Prand最近的樹節(jié)點Pnear,以Pnear為父節(jié)點向Prand方向擴展一個步長,得到新的樹節(jié)點Pnew,對Pnew進行碰撞檢測和機器人動力學(xué)約束檢測,若Pnew未落在障礙物區(qū)域Sobs內(nèi),且滿足機器人動力學(xué)約束,則Pnew擴展成功。重復(fù)上述步驟,直至目標(biāo)點Pend成為樹節(jié)點,或者與某一樹節(jié)點距離小于一個步長,而后以Pend為起點,反向追溯父節(jié)點直至回到起始點Pstart,此時路徑搜索完畢。
從上述RRT算法的原理可以看出,樹節(jié)點擴展時在整個規(guī)劃區(qū)域進行隨機采樣,這種盲目采樣方式增加了大量無效采樣點和樹節(jié)點,極大地增加了規(guī)劃時間、降低了規(guī)劃效率。為了解決這一問題,這里提出了神經(jīng)元活性引導(dǎo)的RRT脫困路徑規(guī)劃方法(RRT Guided by Neuronal Activity,RRTGNA)。在生物激勵神經(jīng)網(wǎng)絡(luò)算法中,機器人陷入“死區(qū)問題”后,未覆蓋區(qū)域神經(jīng)元活性值較高,如圖3(b)所示。較高地神經(jīng)元活性值根據(jù)式(1)向全域神經(jīng)元擴散,在全域范圍內(nèi)對機器人具有吸引作用,此時規(guī)劃區(qū)域內(nèi)必然存在一條或若干條活性值單調(diào)遞減的路線,且此路線必然連接脫困點和死區(qū)位置。根據(jù)這一結(jié)論,可以使用神經(jīng)元活性值對樹節(jié)點擴展進行引導(dǎo)。
在傳統(tǒng)RRT算法中,新節(jié)點Pnew只進行碰撞約束檢驗和機器人動力學(xué)約束檢驗,當(dāng)滿足約束時擴展成功,不滿足約束時則重新采樣。而在RRTGNA算法中,新節(jié)點Pnew首先要進行神經(jīng)元活性值檢驗,新節(jié)點Pnew活性值記為Anew,對應(yīng)的父節(jié)點Pnear活性值記為Anear,只有當(dāng)Anew≥Anear時才滿足神經(jīng)元活性值擴展約束,而后進行碰撞等檢驗。這種使用神經(jīng)元活性值對樹節(jié)點擴展進行引導(dǎo)的方式,避免了樹節(jié)點擴展的隨機性和盲目性,可以極大地提高隨機樹的擴展效率,減少隨機樹擴展點和路徑規(guī)劃時間。在此需要說明的是,任意節(jié)點處的活性值為此節(jié)點所在神經(jīng)元(或柵格)的活性值。
3.3 具有脫困機制的全覆蓋規(guī)劃方法
綜合第2節(jié)和第3節(jié)內(nèi)容,給出具有脫困機制的全覆蓋路徑規(guī)劃方法為:
(1)使用生物激勵神經(jīng)網(wǎng)絡(luò)方法進行全覆蓋路徑規(guī)劃,若不存在死區(qū)問題,則算法結(jié)束,給出全覆蓋路徑;若存在死區(qū)問題,則進入(2);
(2)調(diào)用脫困機制,首先使用元胞自動機搜索脫困點,而后使用神經(jīng)元活性值引導(dǎo)的RRT算法進行脫困路徑規(guī)劃;
(3)機器人按照(2)步路徑行駛到脫困點,而后在未覆蓋區(qū)域使用生物激勵神經(jīng)網(wǎng)絡(luò)進行路徑規(guī)劃,完畢后判斷是否仍存在未覆蓋區(qū)域,若不存在則算法結(jié)束;若存在則進入(2),直至所有區(qū)域完成遍歷,算法結(jié)束。
4 仿真驗證與分析
以圖3(a)所示工作環(huán)境為規(guī)劃區(qū)域,使用柵格法將其分割為25×25個柵格,每個柵格對應(yīng)一個神經(jīng)元。按照柵格類型為其賦不同屬性值,同時初始化神經(jīng)元活性值。生物激勵神經(jīng)網(wǎng)絡(luò)算法參數(shù)設(shè)置為:衰減速率RB=20,活性值上限UB=1,活性值下限LB=-1,外部輸入值EB=100,方向權(quán)值η=0.03,距離常數(shù)μ=0.8。使用生物激勵神經(jīng)網(wǎng)絡(luò)算法以左上角S點為起點進行遍歷路徑規(guī)劃,結(jié)果如圖3(a)所示。從圖中可以看出,機器人陷入了“死區(qū)”問題,A點為“死區(qū)位置”。
按照3.3節(jié)規(guī)劃流程,此時調(diào)用脫困機制,首先使用元胞自動機搜索脫困點,從陷入死區(qū)位置的元胞開始演化,得到元胞演化穩(wěn)定狀態(tài),如圖4(b)所示。未覆蓋區(qū)域(彩色數(shù)字區(qū)域)中狀態(tài)值最小的元胞位置為脫困點,即彩色數(shù)字“9”對應(yīng)的元胞位置。
而后進行脫困路徑規(guī)劃,為了形成對比效果,分別使用傳統(tǒng)RRT算法和神經(jīng)元活性值引導(dǎo)的RRT算法進行規(guī)劃,每種算法各自獨立規(guī)劃50次,從規(guī)劃結(jié)果中隨機抽取一組規(guī)劃結(jié)果進行展示結(jié)果,如圖5所示。
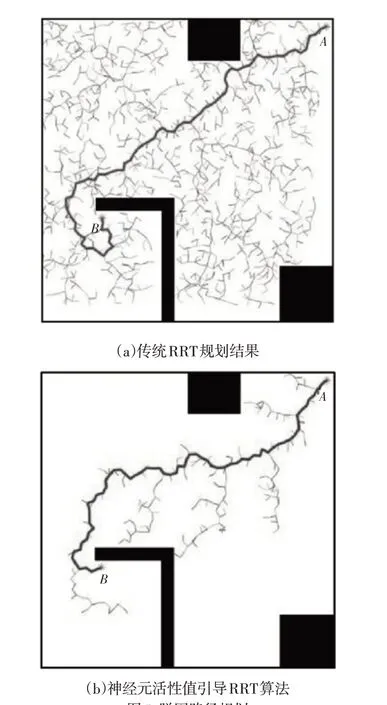
圖5 脫困路徑規(guī)劃Fig.5 Escape Path Planning
圖5中隱藏了機器人已行駛路線,只給出了規(guī)劃路徑和采樣點。圖中A點為“死區(qū)位置”,B點為元胞自動機確定的脫困點。從圖中可以看出,傳統(tǒng)RRT算法為全局采樣,采樣具有盲目性和隨機性。而改進RRT算法在神經(jīng)元活性值的引導(dǎo)作用下,采樣點的采樣和隨機樹的擴展向神經(jīng)元活性值較高的方向前進,具有較強的方向性,避免了全局范圍內(nèi)的采樣和擴展,極大地減少了無效節(jié)點數(shù)量。統(tǒng)計傳統(tǒng)RRT算法和神經(jīng)元活性值引導(dǎo)RRT算法(RRTGNA)50次運行結(jié)果的平均時間、路徑平均長度、擴展節(jié)點數(shù),如表1所示。
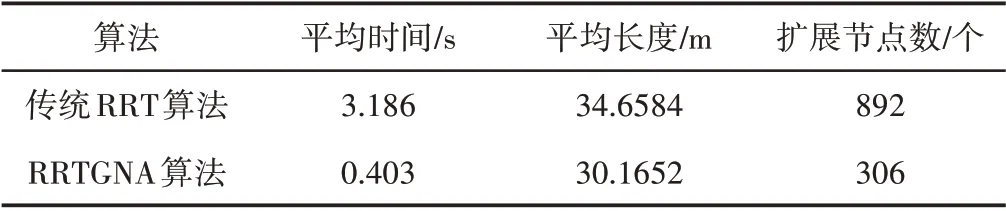
表1 脫困路徑規(guī)劃結(jié)果Tab.1 Escape Path Planning Result
從表中可以看出,RRTGNA算法平均運行時間為0.403s,比傳統(tǒng)RRT算法小了約一個數(shù)量級;RRTGNA 算法規(guī)劃的脫困路徑平均長度比傳統(tǒng)RRT算法減少了12.96%;RRTGNA算法的擴展節(jié)點數(shù)為306個,比傳統(tǒng)RRT算法少了約兩倍。以上數(shù)據(jù)說明了RRTGNA 算法在采樣和擴展時具有極強的方向性,沿著神經(jīng)元活性提高的方向擴展,極大地減少了擴展節(jié)點數(shù),降低了算法運行的時間消耗,同時神經(jīng)元的引導(dǎo)作用使路徑擴展目的性強,起到了降低路徑長度的效果。
機器人沿著脫困路徑到達(dá)脫困點,而后使用生物激勵神經(jīng)網(wǎng)絡(luò)對未覆蓋區(qū)域繼續(xù)進行遍歷規(guī)劃結(jié)果,如圖6所示。
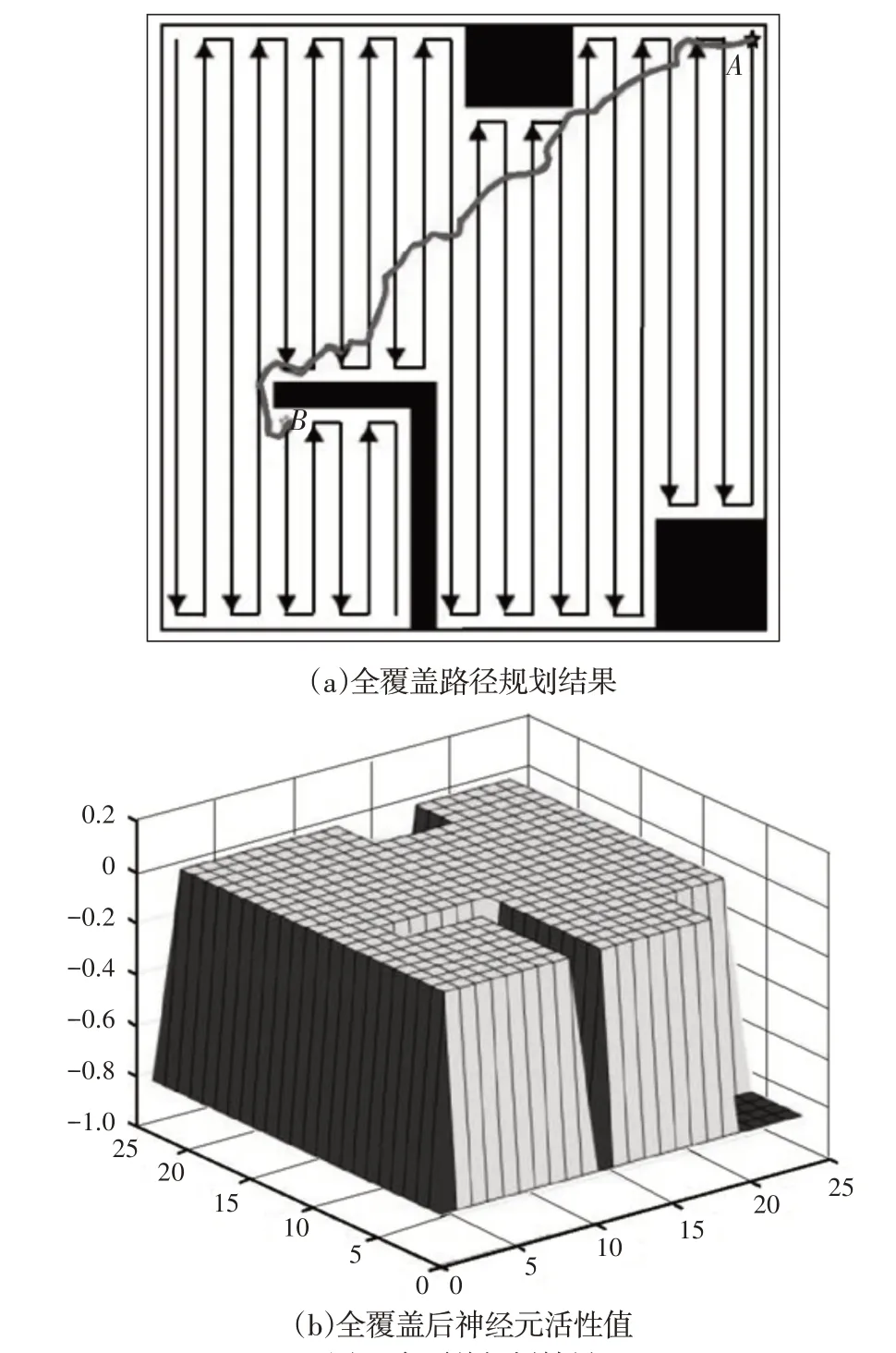
圖6 全覆蓋規(guī)劃結(jié)果Fig.6 Complete Planning Result
從圖中可以看出,機器人沿脫困路徑擺脫死區(qū)后到達(dá)脫困點,以脫困點為起點使用生物激勵神經(jīng)網(wǎng)絡(luò)算法繼續(xù)進行遍歷路徑規(guī)劃,完成了對整個工作區(qū)域的遍歷。圖6(b)中除障礙物神經(jīng)元外,其余神經(jīng)元活性值為0,也表示機器人對整個區(qū)域完成了遍歷。由此可以看出,具有脫困機制的生物激勵神經(jīng)網(wǎng)絡(luò)算法能夠有效遍歷整個工作區(qū)域,當(dāng)陷入“死區(qū)問題”時,調(diào)用脫困機制能夠高效地擺脫死區(qū)而完成所有區(qū)域的遍歷。
5 結(jié)論
這里研究了機器人對工作區(qū)域的遍歷路徑規(guī)劃問題,以生物激勵神經(jīng)網(wǎng)絡(luò)算法為基礎(chǔ),當(dāng)機器人陷入死區(qū)后調(diào)用脫困機制,可以高效脫困并完成區(qū)域遍歷。仿真驗證,得出了以下結(jié)論:(1)基于元胞自動機的脫困點搜索方法可以有效找到最佳脫困點;(2)神經(jīng)元活性值引導(dǎo)的RRT算法在節(jié)點擴展時具有較強的方向性,減少了擴展節(jié)點和運行時間,降低了脫困路徑長度;(3)帶脫困機制的生物激勵神經(jīng)網(wǎng)絡(luò)算法可以完成區(qū)域遍歷,是一種有效的區(qū)域遍歷方法。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28
