人體不對稱運動在多因素干擾下穩定性研究
2022-06-28 09:54:28郭占騰
機械設計與制造 2022年6期
郭占騰,樊 軍
(新疆大學機械工程學院,新疆 烏魯木齊 830047)
1 引言
人體在多因素影響下的運動穩定性問題一直是人機工程、醫療器具、體育運動以及穿戴式機器人等領域的重點研究內容[1]。尤其是目前下肢外骨骼、智能假肢等高智能機器人正逐步被大規模的應用到軍事、工業、醫療、虛擬現實等領域,這些穿戴品必然會對人體運動產生多方面的影響[2]。人體在多因素干擾下不對稱運動穩定性變化的研究是這些穿戴設備與人體良好交互的基礎。
目前國內外在這方面的研究主要分為兩方面。(一)在人體運動研究方面,文獻[3]人以人體行走為例,對膝關節進行運動學與動力學分析,得到膝關節各種運動參數的變化情況,為下肢運動提供了一定的理論基礎;文獻[4]通過點云采樣技術擬合獲得人體運動信息,實現了人體不對稱運動信息有效提取,提高了人體運動識別的真確率;文獻[5]通過傳感器來獲取肢體的實時姿態信息,設計了一種人體可穿戴式的人體運動捕捉系統;文獻[6]通過建立一種能夠實時反應人體運動特征的簡化人體模型來研究人體運動。(二)在多因素干擾下人體運動穩定性方面,文獻[7]進行了考慮外界干擾的擬人機器人模型的穩定性分析,給出了支撐多邊形的計算機表達方法和失穩時旋轉邊界自動確定方法;文獻[8]通過CGA(clinical gait analysis)以及動力學分析得到各關節驅動力矩并以此判斷蹲起運動的穩定性。
以上各位學者分別對不對稱的人體運動以及受到干擾外力時的人體運動穩定性采用多種方法進行研究,但是在實際情況下人體不對稱運動的穩定性會受多種因素影響,不能只考慮單一因素。目前尚未見到將人體不對稱運動與多因素影響結合到一起分析研究的案例。
因此針對不對稱運動在多因素干擾下的穩定性研究,選取了人體蹲起這一極具代表性的運動做為研究案例進行研究。這種人體不對稱運動是人們在日常生活中最常見的一種運動方式,在運動過程中速度、穩定性等時刻在變化,尤其是在搬運物體時,人體穩定性會受到負重、上身晃動以及外力干擾的影響,若運動的穩定性過低則會給人體帶來不良后果。所以結合蹲起運動的運動學特點,通過提出三種性能因子來為人體蹲起運動穩定性的實時變化提供評價標準。
首先建立人體簡化模型,對人體簡化模型進行運動學、動力學分析,根據蹲起過程中受力及運動情況,分別設定了負重載荷因子、干擾外力因子以及上身姿態因子來綜合判斷單膝蹲起過程中的穩定性。最后通過實例計算及仿真驗證該理論的正確性,該方法可以準確判斷蹲起運動中穩定性的變化,為人體運動、擬人機器人或者助力外骨骼運動穩定性的研究提供理論依據。
2 構造人體簡化模型
人體在蹲起過程中主要依靠髖關節、膝關節與踝關節的運動實現,所以為了方便計算,可以忽略頭部、手部及腳部的運動,故將人體簡化為5連桿剛體模型以便計算[9]。
3 蹲起過程穩定性分析
蹲起時,膝關節為主要運動及驅動關節,當人體負重過大時,人體在起身過程中膝關節提供的力就必須要隨之增大,此時會導致蹲起運動過程的不穩定。
當人體在蹲起過程中受到外力干擾時,當外力較小時不會破壞該過程的穩定性,但是當外力過大時就會影響該過程。所以要保證蹲起過程的穩定性就要將外力控制在一個合理的范圍內。人體在起身過程中若上半身發生X、Y方向的晃動時,特別是身體左右晃動時,會嚴重影響蹲起過程的平衡性從而導致失穩。
3.1 上身負重載荷性能因子
人體在進行單膝蹲起運動時,其下肢可分為支撐側與擺動側。向前跨步的腿為支撐側,主要起支持身體與助人起立的作用;后者為擺動側,主要起協調人體平衡的作用。
支撐側膝關節水平加速度αx與垂直加速度αz

在擺動側中由于膝關節是在繞該側髖關節運動,在該側中有相對運動,但是由于支撐側膝關節提供主要力矩帶動擺動側完成運動,所以在擺動側中,膝關節與支撐側膝關節有牽連運動。根據剛體平面運動基點法將相對運動與牽連運動合成得到擺動側膝關節運動。基點速度合成可表示為:

式中:ve—基于動坐標系的牽連運動;vr—B的相對運動。兩者都可以分解到X軸與Z軸上。
牽連運動速度水平速度與垂直速度:

擺動側膝關節相對運動水平速度與垂直速度:

則合成后膝關節B點加速度的水平分量aBx與垂直分量aBz可表示為:

根據剛體平面運動微分方程:

式中:al1與al2—上身l1與支撐側大腿l2的質心加速度。
同理擺動側膝關節驅動力矩M2亦可求出。
當人體在進行蹲起運動時,可能會受到不同的干擾外力,以及上身姿態可能會發生變化,因此膝關節力在這些影響因素下在相同時刻會存在不同值。在實際控制時需要實時計算出確定的膝關節力。因此,利用最小方差確定唯一驅動力矩。

式中:a—t時刻膝關節力解的個數;Mit—t時刻第i個膝關節驅動力矩Et(M)為t時刻驅動力矩的算術平均值。

定義1M1與M2分別是蹲起時支撐側膝關節與擺動側膝關節的力矩,如果在蹲起的過程中M1與M2越接近于Mmin,則可認為M1與M2變化越平穩,蹲起過程就更穩定,因此這里提出上身負重載荷性能因子與來評價穩定性。

基于經濟的全面建設,高速公路橋梁在高速公路建設中的重要性也逐漸突顯出來。所以,高速公路橋梁施工質量也將直接影響高速公路穩定性,要強調橋梁基礎的關鍵性。鉆孔灌注樁施工技術的成本不高且操作方便,具有一定的適應性,所以被廣泛應用在橋梁基礎建設中。由此可見,深入研究并分析高速公路橋梁鉆孔灌注樁的應用與施工工藝具有一定的現實意義。
3.2 干擾外力因子
在蹲起過程中,要確保人體在蹲起過程中保持穩定,就不能忽略外部環境的影響。我們要確保人體在蹲起過程中受到外力干擾時的穩定性就必須對失穩危險的范圍進行量化。
當人體在蹲起過程中受到一些期望或非期望的外界干擾力Qi(i=1…m)時,其實際ZMP位置矢量投影:
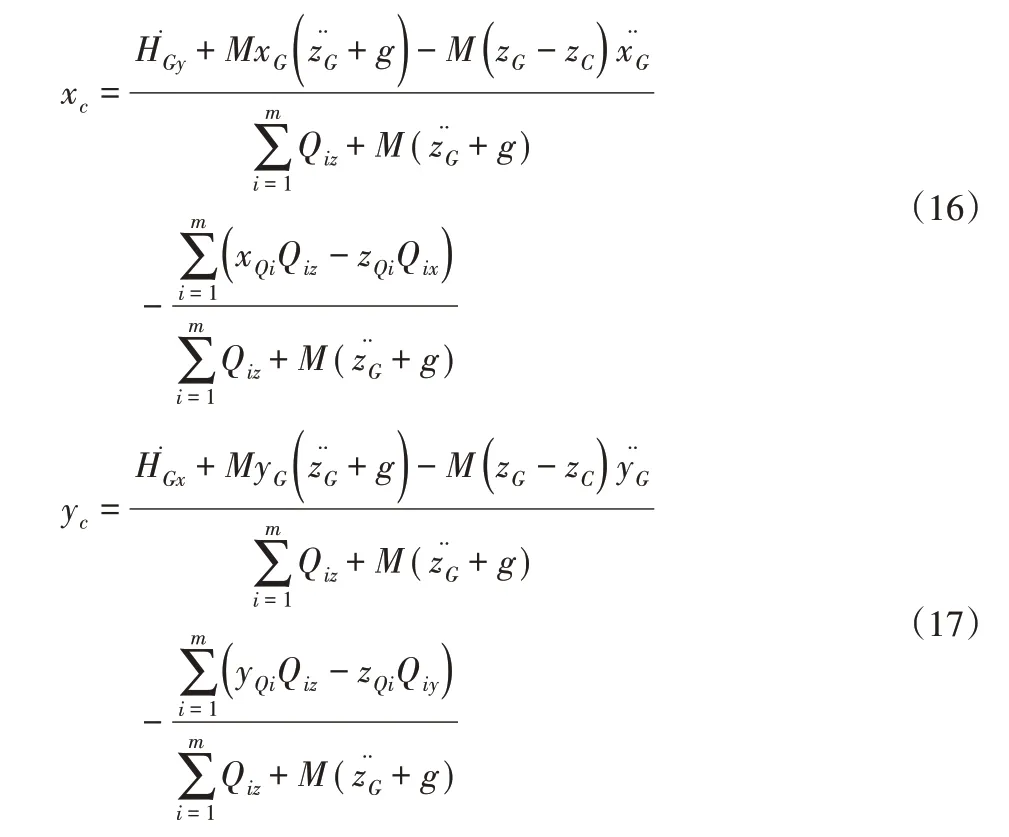
當人體不受外界干擾穩定的期望ZMP:
式中:HG—整個身體質心的瞬時轉動力矩;M—總質量。

式中:HGi—第i個連桿的瞬時轉動力矩。
定義2 人體在蹲起過程中受到外力干擾時,要確保其穩定性就要保證實際ZMP盡可能的接近期望ZMP。因此提出外力性能因子ξF1與ξF2來評價蹲起過程中實際ZMP與期望ZMP之間的距離。

當實際ZMP的橫坐標與縱坐標與期望ZMP的橫縱坐標接近時,ξF1、ξF2的值接近1,表示蹲起過程越穩定。
3.3 人體姿態性能因子
人體在起身過程中,若上半身只繞Z軸旋轉并不會對其穩定性造成影響。若上半身發生X、Y軸方向的傾斜則會對穩定性產生影響,特別是身體左右傾斜時,傾斜角過大時甚至會出現跌倒狀況。所以應避免此現象的發生。故設定姿態性能因子ξα1與ξα2。
定義3設定姿態性能因子ξα1與ξα2來衡量身體傾斜程度是否過大,表示如下:
當ξ1與ξ2越小時,上半身的姿態角φ1、φ2越接近±,則其穩定性越低;反之,ξα1與ξα2越大時,上半身的姿態角φ1、φ2越接近00,蹲起過程穩定性越高。
4 蹲起運動過程穩定性評價
由于蹲起運動是通過膝關節驅動來實現的,因此在蹲起運動過程中受到外界干擾時,其運動狀態可能會發生變化,穩定性會受到影響。故評該蹲起過程的穩定性是指,蹲起過程受到外界干擾時,身體在能夠完成蹲起運動時抵御干擾的能力。對蹲起運動過程造成影響的三個因素:上身負重、在蹲起過程中受到的外力干擾以及上半身的晃動。
在整個蹲起運動過程中,當人體受到外界干擾力作用與上半身姿態一定時,負重不同時,該過程的穩定性也不同;當負重與上半身的姿態一定時,若身體受到預期之內或預期之外的干擾力作用時,整個運動過程的穩定性也會受到一定的影響;當負重與外力干擾一定,那么上半身若發生大幅度的晃動,顯然也會對該運動過程的穩定性造成很大的影響。因此,在穩定性研究中綜合考慮人體上身負重、身體受到的外力干擾以及上身姿態三個因素,通過加權的方式得到人體蹲起運動狀態下的穩定性評價指標Ld,整個蹲起運動過程可以用穩定性評價指標Ld來評價整個過程的穩定性,而且加權之后Ld的數值大小可以評價蹲起運動過程的穩定裕度,直觀的展現出蹲起過程中某個時刻的穩定程度。Ld表達式如下:

加權系數選取原則:一般情況下,各組加權系數選取與之相對應的優化目標相關,對于相同的優化目標,選取不同的加權參數與即使是相同的運動狀態,其穩定裕度也會不同。在人體蹲起運動穩定裕度求解過程中,加權系數反應了蹲起過程中的上身負重載荷因子、干擾外力因子與上身姿態因子在整個運動過程中對其穩定性的重要程度。
不管哪種情況對該運動過程都是極為不利的,所以取ξw1=表示外力干擾因子ξF1與ξF2對整個運動過程穩定裕度的影響與貢獻程度,由于蹲起過程中FZMP在X、Y平面上的矢量投影需要接近穩定狀態下ZMP才能保證蹲起運動的穩定性,所以不管是X方向還是Y方向,對其穩定裕度的影響都是相同的,所以取表示上身姿態性能因子對蹲起過程穩定裕度的貢獻程度,上半身身體的晃動會使身體的質心發生改變,同時由于是蹲起運動,上半身略微的前傾或后仰并不會對整個運動過程的穩定性產生較大的影響,但是若上半身在蹲起過程中發生左右傾斜就會對整個運動的穩定性造成巨大的影響,因此對整個運動過程的穩定裕度的貢獻大且影響程度高。綜上可取較為客觀的評價上半身姿態性能因子對蹲起運動過程穩定程度的影響。
人體蹲起運動穩定性評價指標Ld的取值范圍Ld∈(0,1 ],Ld越接近0說明在蹲起過程中人體姿態極不穩定隨時或即將發生跌倒其穩定裕度逼近于0;Ld=1表示當前運動狀態極為穩定,沒有受到外界絲毫干擾,是一種極為理想的運動狀態,其穩定裕度為1;其他運動狀態的穩定裕度在0與1之間。
5 實驗與分析
5.1 人體模擬實驗
本次實驗由8個壓力傳感器、4個角速度傳感器以及一個慣性傳感器構成數據獲取系統,傳感器種類及布局,如表1 所示。選取十名身高175.0cm左右,體重65kg左右,身體健康的男性實驗者分別進行雙膝對稱蹲起運動與單膝不對稱蹲起運動,每名實驗者分別在無任何干擾以及施加干擾的情況下做3組蹲起運動,每組10次,如表2所示。

表1 傳感器種類及布局Tab.1 Sensor Type and Layout
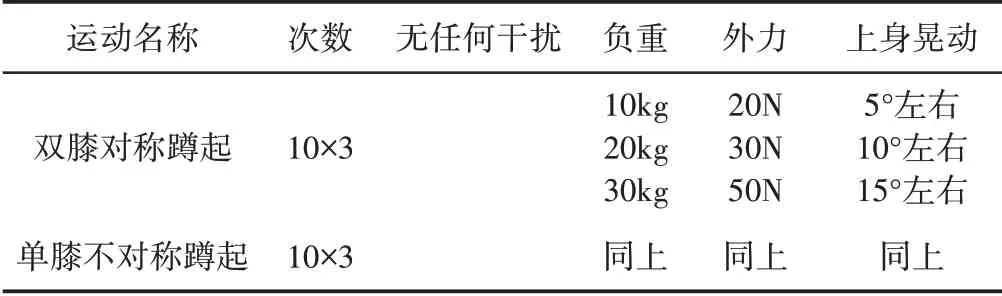
表2 實驗詳情Tab.2 Experimental Details
為減少噪聲信號對蹲起運動數據采集的影響,利用中值濾波算法對原始數據進行預處理,這樣既保留了各個傳感器原始數據的數據特征,還很好的過濾掉了噪聲對原始數據的影響[10]。將與處理過的數據導入到MATLAB 中,根據上文動力學方程編程計算求解,得到雙膝蹲起過程與單膝蹲起過程穩定性變化情況。實驗設備與實驗流程,如圖2所示。人體運動模式,如圖3所示。
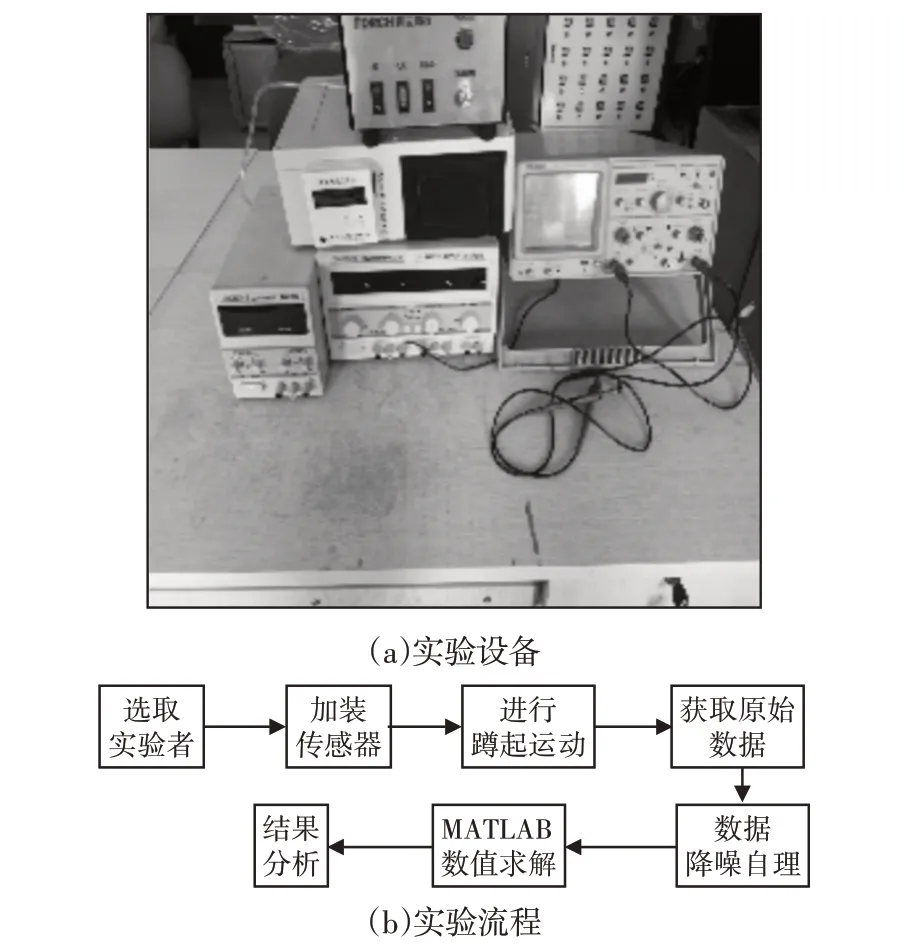
圖2 實驗設備與實驗流程Fig.2 Experimental Equipment and Process
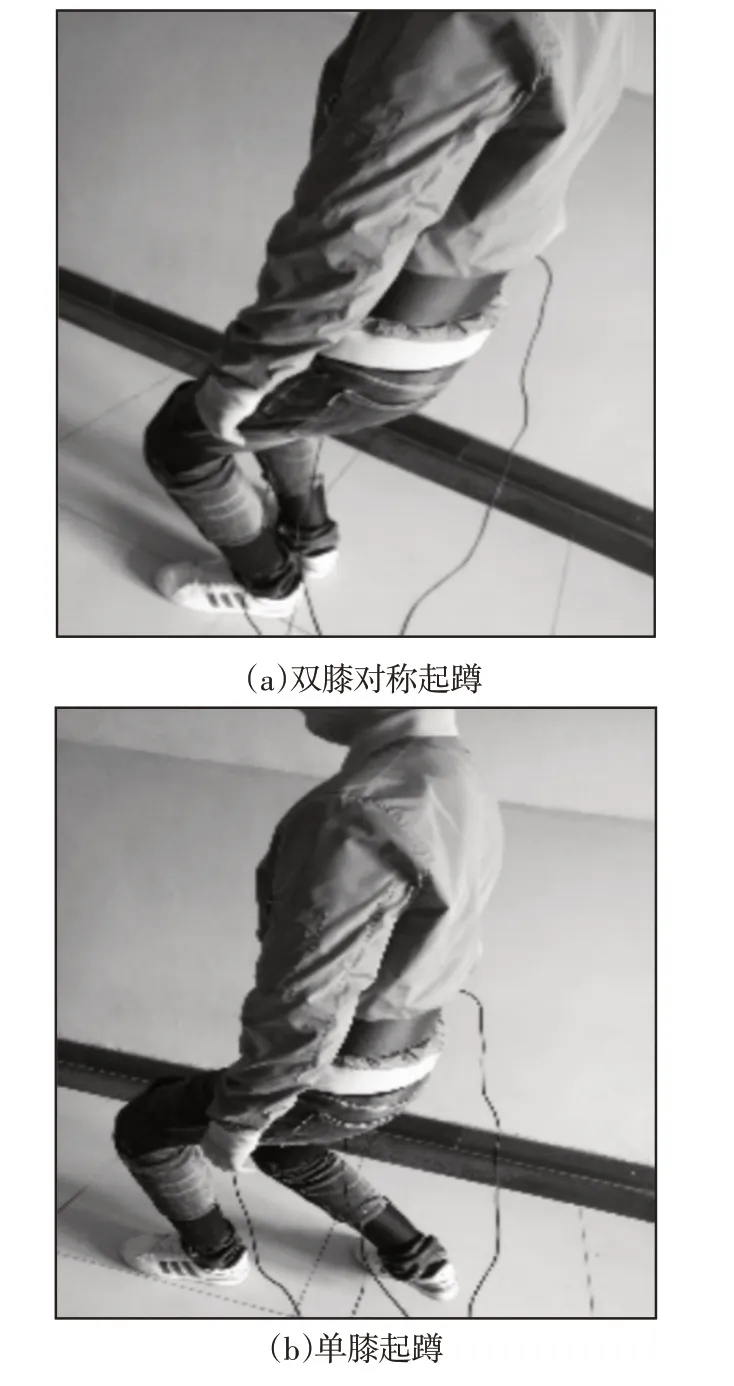
圖3 人體運動模式Fig.3 Human Movement Mode
5.2 仿真驗證
除了進行人體蹲起實驗驗證,還運用仿真軟件對蹲起過程穩定性進行研究。首先利用Solidworks軟件建立人體簡化模型,再把模型導入到ADAMS 中。為保證仿真與人體實驗結果對比的可靠性,因此在ADAMS仿真中模型的規格參數、運動狀態、受到的外界干擾以及蹲起運動次數都要與人體實驗相同。其中單膝蹲起運動,如圖4所示。同樣的將ADAMS仿真得到的數據導入到MATLAB中,利用之前編程好的程序進行求解,最后用plot得到結果圖。
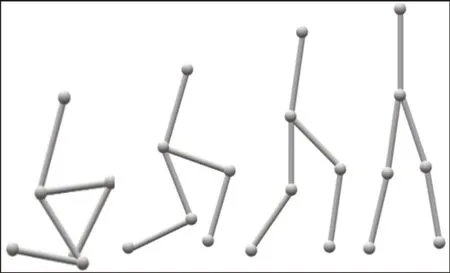
圖4 單膝蹲起模擬圖Fig.4 Simulations of Crouching on One Knee
5.3 結果分析
無干擾下雙膝對稱蹲起與單膝不對稱蹲起對比圖,如圖5所示。從圖5中可知,經過人體實際數據采集與軟件模擬可以看出,當人體不受外界干擾時,單膝不對稱蹲起運動與雙膝對稱蹲起運動穩定性大致相同,但是單膝蹲起運動穩定裕度的最低值要大于雙膝蹲起運動的最低值,單膝蹲起運動要更加穩定。同時還發現不管是單膝蹲起運動還是雙膝對稱蹲起運動,其穩定性變化都呈現出先降低后增大的趨勢。
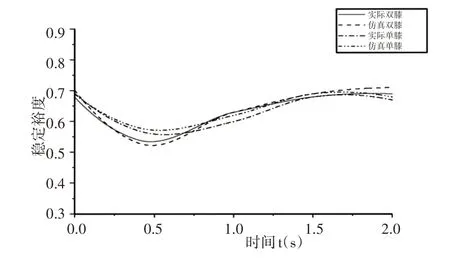
圖5 無干擾下雙膝對稱蹲起與單膝不對稱蹲起對比圖Fig.5 Comparisons Between Symmetrical Squatting of Knees and Asymmetrical Squatting of One Knee without Interference
負重20kg下蹲起對比圖,如圖6所示。從圖6可以了解到當人體受到20kg 的負重時,穩定性相對于圖5 來說有了明顯的變化,且可以明顯的區分出單膝對稱蹲起與雙膝不對稱蹲起時的穩定性大小差異當人體負重達到30kg 時,該變化程度更加明顯。單膝蹲起運動穩定性在運動全程都大于雙膝蹲起運動,說明人體的負重是影響蹲起運動的重要因素,且在有負重的情況下單膝蹲起運動的穩定性要高于雙膝蹲起運動的穩定性。
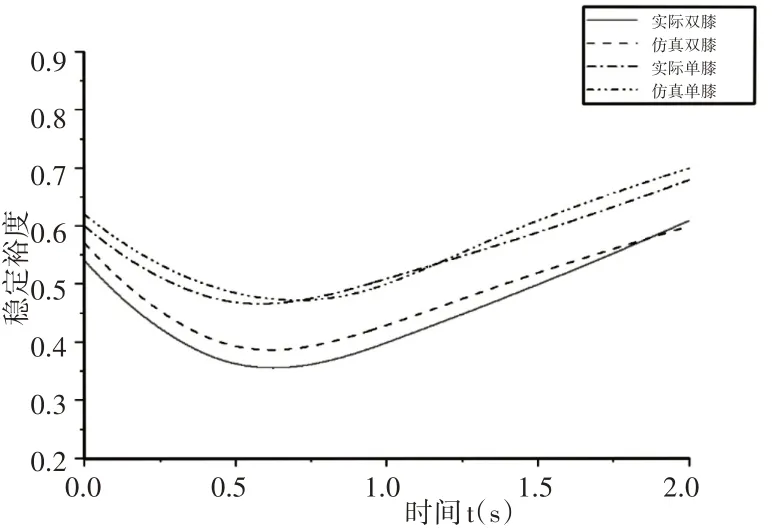
圖6 負重20kg下蹲起對比圖Fig.6 Comparisons of Squatting and Lifting with 20kg Load
從圖7可知,當人體受到20N的干擾外力時,穩定性在蹲起前期變化幅度很大,隨著人體逐漸站立起來穩定性也隨之增大。上身晃動角度在10°左右人體進行蹲起運動時的穩定性變化情況,如圖8所示。從圖8中可知,雙膝蹲起運動穩定性的最低值要大于單膝蹲起運動穩定性的最低值,當受到的干擾外力接著增大時或者上身晃動的角度也接著變大時,該現象更加明顯。這說明,單膝蹲起運動的穩定性要比雙膝蹲起運動穩定性高,更不易出現跌倒的情況。
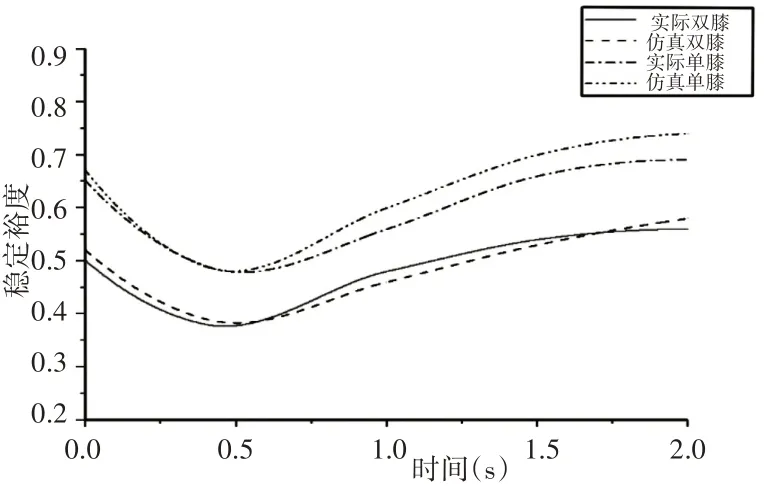
圖7 20N干擾外力時蹲起對比圖Fig.7 Contrast of Squatting When 20N Interferes with External Force
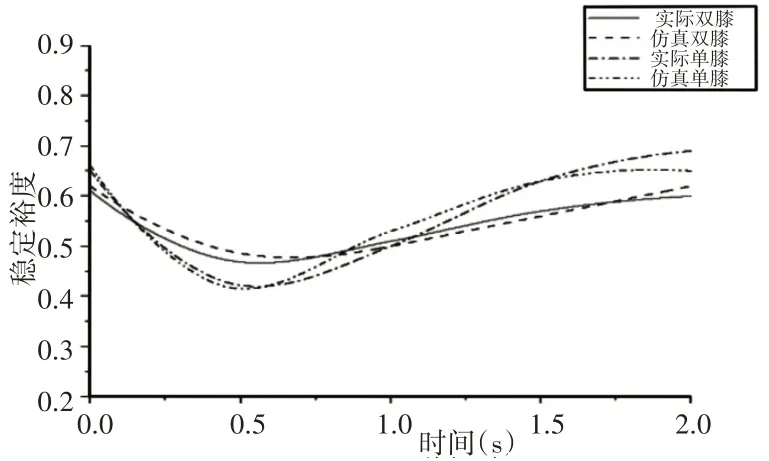
圖8 上身晃動10°左右蹲起穩定性對比圖Fig.8 Stability Comparison of Squatting with Upper Body Shaking Around 10 Degrees
身體負重20kg的情況下,穩定裕度分別保持在0.3、0.45、0.6時,干擾外力、上身晃動與時間的對應關系,如圖9~圖11 所示。從圖中可以看出,在蹲起前期(0~0.4)s時,干擾外力與上身的晃動角度范圍很大,但是在(0.4~1.0)s時穩定裕度要想繼續保持在0.45時就要減少干擾外力或上身的晃動角度,在1.4s以后由于人體基本達到站立姿態,因此身體可以承受較高的外界干擾。
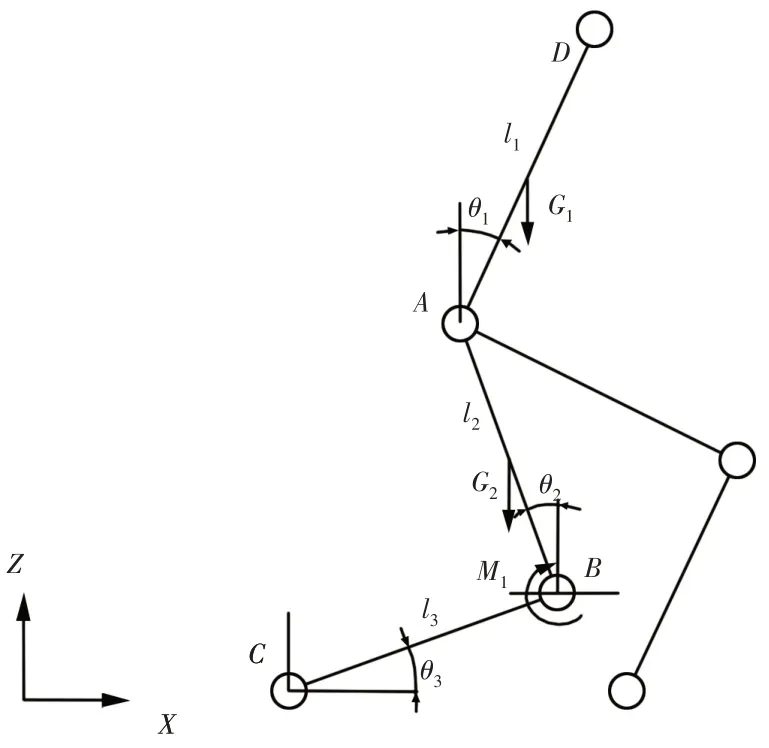
圖1 人體簡化剛體模型Fig.1 Simplified Rigid Model of Human Body
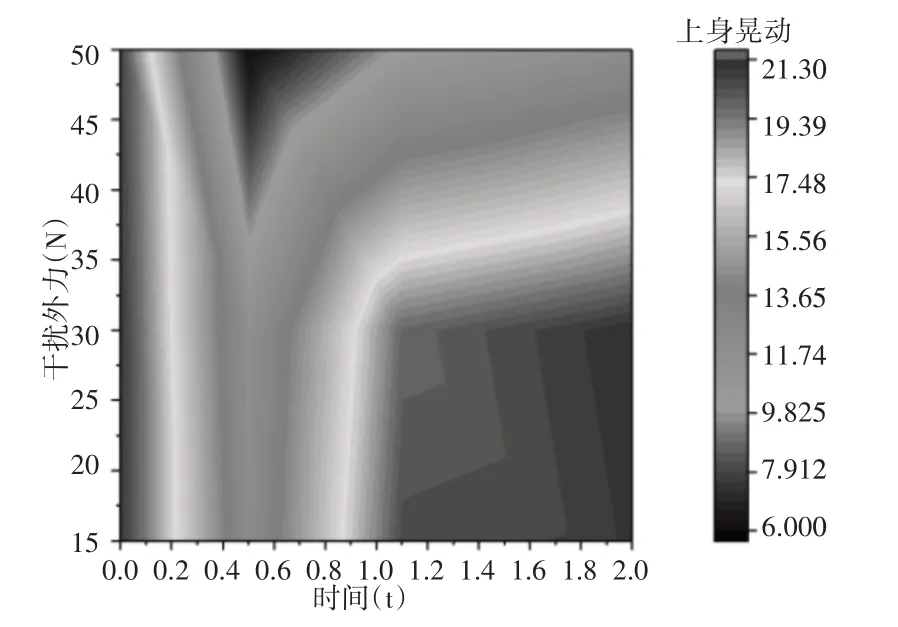
圖9 身體負重20kg的情況下,穩定裕度保持在0.3時,干擾外力、上身晃動與時間的對應關系Fig.9 Weight-Bearing 20kg,Stability Margin0.3,Corresponding Relations Between Disturbing External Force,Upper Body Posture and Time
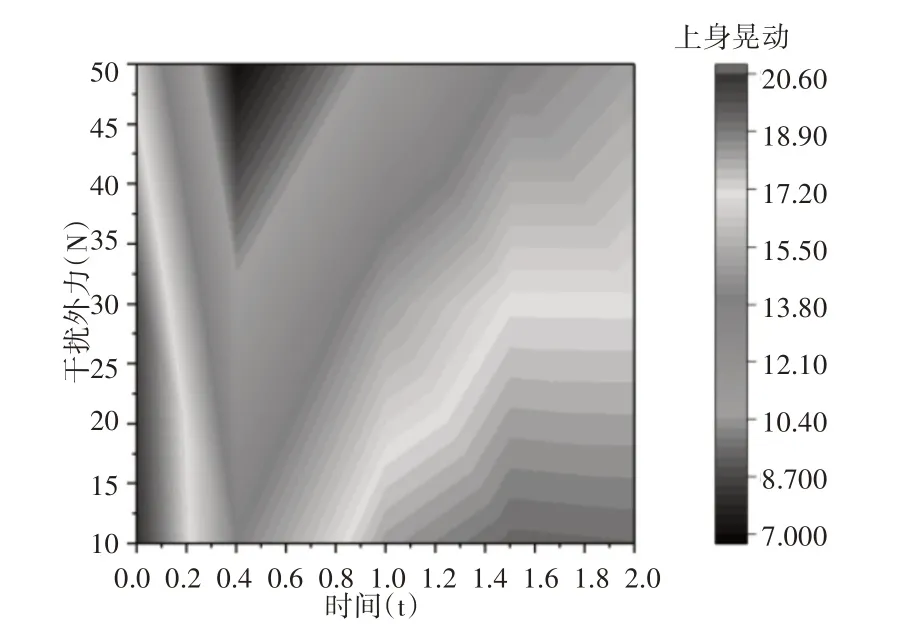
圖10 身體負重20kg的情況下,穩定裕度保持在0.45時,干擾外力、上身晃動與時間的對應關系Fig.10 Weight-Bearing 20kg,Stability Margin0.45,Corresponding Relations Between Disturbing External Force,Upper Body Posture and Time
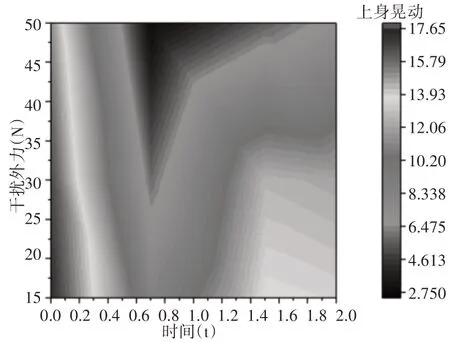
圖11 身體負重20kg的情況下,穩定裕度保持在0.6時,干擾外力、上身晃動與時間的對應關系Fig.11 Weight-Bearing 20kg,Stability Margin0.6,Corresponding Relations Between Disturbing External Force,Upper Body Posture and Time
綜上所述,人體在蹲起運動過程中前期的穩定性較差并且身體負重、外力的干擾以及人體晃動這三種因素相互關聯都對的蹲起運動有著較大的影響,在分析人體運動時特別是不對稱運動時要著重研究這三種因素。
6 結論
(1)人體在進行對稱運動與不對稱運動時,人體的穩定性由多個因素相互影響的,有外界的干擾因素與自身的干擾因素,不能簡單地只考慮一種影響因素。
(2)在人體運動中,特別是蹲起運動中,影響蹲起運動的穩定性因素主要有自身的負重、干擾外力以及上身晃動,這三種因素對人蹲起運動的穩定性影響程度最大。在以后更深層次地研究蹲起運動穩定性時,要著重考慮這三種因素的影響。
(3)通過人體運動實驗與ADAMS軟件仿真,驗證了推導公式及理論的正確性。利用此理論可以得到人體在穩定運動情況下的自身運動與外界干擾的邊界值,為今后深入研究人體運動穩定性打下了一定的理論基礎,不止于此,該理論同樣可以應用到的擬人機器人或下肢外骨骼的穩定性研究中。
