具有越障能力的機器人綜述
2022-06-16 14:18:48劉俊陽王佳楠
裝備制造技術(shù) 2022年3期
劉俊陽,王佳楠
(中國石化大連石油化工研究院,遼寧 大連 116045)
0 引言
隨著時代與技術(shù)的發(fā)展進步,機器人技術(shù)逐漸成熟,結(jié)合智能技術(shù)的機器人在生活與工作的各個領(lǐng)域內(nèi)逐漸推廣應(yīng)用。按照國標機器人分類[1],根據(jù)機器人的運動方式,機器人被分為履帶式機器人、輪式機器人、足腿式機器人、蠕動式機器人、浮游式機器人、潛游式機器人、飛行式機器人和其他運動方式機器人;根據(jù)機器人的應(yīng)用領(lǐng)域,機器人被分為工業(yè)機器人、個人/家用服務(wù)機器人、公共服務(wù)機器人、特種機器人以及其他應(yīng)用領(lǐng)域機器人。
在我國,機器人被應(yīng)用于各種場景,主要用來降低勞動強度,執(zhí)行危險或高精尖的工作。由于不同工作環(huán)境下的機器人的移動能力存在差異,適應(yīng)的工作環(huán)境也不相同,其在復(fù)雜環(huán)境下的移動能力以及越障性能也越來越受到重視,故機器人在復(fù)雜環(huán)境下越障能力以及影響越障性能的影響因素被重點研究。本文主要針對履帶式機器人[2-7]、輪式機器人[8-10]以及混合運動式機器人[11,12],對其零部件結(jié)構(gòu)、運動過程運動方式、越障能力與影響因素進行分析,總結(jié)影響越障能力的內(nèi)在機理,并對現(xiàn)有機器人越障能力進行分析與評價。
1 機器人越障能力分析
對機器人越障性能分析主要以結(jié)構(gòu)性能研究為主,結(jié)合靜力分析,考慮越障姿態(tài)等諸多影響參數(shù)的定量影響程度,以便于對結(jié)構(gòu)參數(shù)進行進一步改進優(yōu)化。
1.1 履帶式機器人越障能力分析
履帶式機器人由于越障能力、地形適應(yīng)能力強、可原地轉(zhuǎn)彎、在特種環(huán)境下越障性能更好、工作效率高等優(yōu)點,在工業(yè)環(huán)境中應(yīng)用范圍廣泛。對于提高履帶式機器人越障能力,普遍基于結(jié)構(gòu)改造方式,采用雙履帶變結(jié)構(gòu)或者增加履帶式擺臂結(jié)構(gòu)等方式來提高履帶機器人的越障能力。宗成國[2]設(shè)計了由前后兩殼體組成的關(guān)節(jié)式雙履帶機器人(圖1),通過在前后殼體關(guān)節(jié)處放置一種被動調(diào)節(jié)裝置,來保證前后殼體存在角度時伺服壓緊履帶緊繃,使其越障性能和適應(yīng)環(huán)境能力都得到提升。Zhao[3]針對越障能力設(shè)計一種變結(jié)構(gòu)雙履帶機器人(圖2),通過改變主、從動輪距離可以使履帶變成三角形來實現(xiàn)越障,越障性能較好。以上兩種機器人結(jié)構(gòu)都采用類似的結(jié)構(gòu)改造方式,即通過被動或主動調(diào)節(jié)主、從動輪,同時保證壓實履帶進而提高機器人的越障能力。但這種結(jié)構(gòu)方式下機器人越障高度與變形后機器人的高度正向相關(guān),如進一步提高越障能力會增加機器人總體長度,導(dǎo)致機器人大型化同時越障仰角更低。

圖1 關(guān)節(jié)式雙履帶機器人結(jié)構(gòu)圖

圖2 變結(jié)構(gòu)前后履帶機器人結(jié)構(gòu)
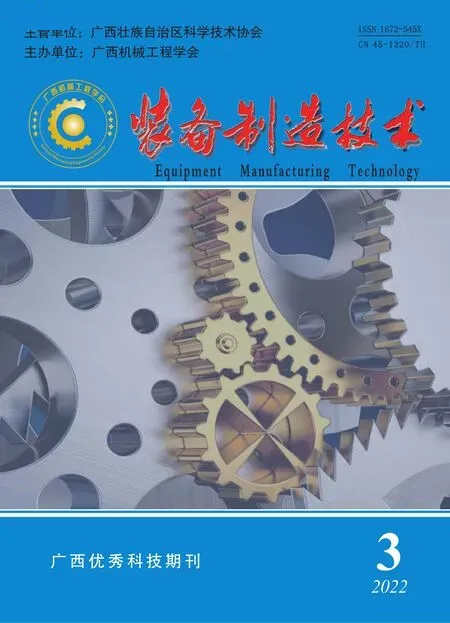
針對增加履帶擺臂結(jié)構(gòu)的四履帶機器人(圖3),劉昌福[4]分析了其在圓管以及樓梯結(jié)構(gòu)處越障能力,以及越障過程中速度、加速度對越障動態(tài)穩(wěn)定性的影響,并完成了越障可行性現(xiàn)場實驗測試。王偉東[5]采用模塊化思想設(shè)計一種四履帶式機器人(圖4),總結(jié)出一種基于動力學(xué)的越障運動規(guī)劃方法。這種四履帶機器人采用增加履帶擺臂結(jié)構(gòu)方式規(guī)避履帶壓實問題,同時增加履帶擺臂結(jié)構(gòu)使越障更加靈活,對機器人長度及重心影響較小,但理論越障高度仍和擺臂結(jié)構(gòu)長度正相關(guān)。
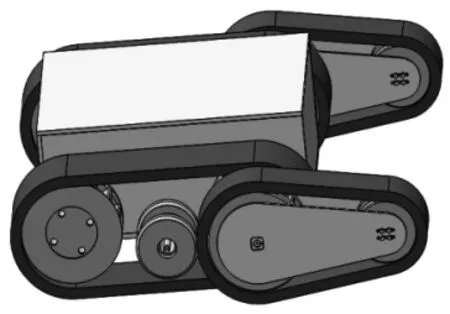
圖3 小型關(guān)節(jié)式履帶機器人結(jié)構(gòu)圖

圖4 履帶機器人整體結(jié)構(gòu)圖
還有一些文獻進行了增加履帶擺臂結(jié)構(gòu)的六履帶機器人的越障性能的研究,如徐如強[6]以六履帶機器人為研究對象(圖5),分析了典型障礙處的越障性能,得到了越障性能與結(jié)構(gòu)特征的內(nèi)在關(guān)系及機器人自身結(jié)構(gòu)對越障性能的影響程度。趙建偉[7]建立了六履帶巡檢式機器人(圖6)三維實體模型和運動學(xué)方程,分析了質(zhì)心位置變化規(guī)律與越障高度。這種六履帶機器人在前后擺臂結(jié)構(gòu)的作用下越障能力有了極大的提升,機動性較高,但前后擺臂的存在導(dǎo)致機械結(jié)構(gòu)較為復(fù)雜,機械傳動效率隨之降低,機器人整體結(jié)構(gòu)較大,適應(yīng)環(huán)境受限。

圖5 六履帶機器人結(jié)構(gòu)模型
圖6 六履帶機器人結(jié)構(gòu)圖
1.2 輪式機器人越障能力分析
輪式機器人速度快、效率高、運動噪聲低,但是越障能力較弱、地形適應(yīng)能力差、轉(zhuǎn)彎效率低。因此,需要對其越障性能以及運動效率進行改進。孫雪蓮[8]設(shè)計了一種基于同步齒形帶來保證六輪機器人同步性的全驅(qū)動方式(圖7),有效地強化了越障性能并完成現(xiàn)場實測。張世月[9]針對一種六輪移動平臺(圖8),基于靜力分析對各模塊部件進行了輕量化改進,提高了機動性與地形適應(yīng)能力。目前主要以優(yōu)化結(jié)構(gòu)方式提高六輪式機器人的越障性能。

圖7 六輪機器人底盤三維模型

圖8 六輪移動平臺示意圖
在套管內(nèi)輪式牽引機器人方面(圖9),馬廣志[10]針對其徑向尺寸小的特點,通過爬行輪與套管內(nèi)壁接觸線與軸向方向存在偏心角來加強管內(nèi)通過性,加強這種輪式牽引機器人越障能力。但是對牽引機器人的優(yōu)化設(shè)計方面不夠全面,對影響越障方面的因素研究較少,越障方面優(yōu)化空間大。

圖9 水平井輪式牽引機器人
1.3 混合運動式機器人越障能力分析
混合運動式機器人是綜合履帶式機器人、輪式機器人等的結(jié)構(gòu)特性,有選擇性地結(jié)合了不同種類機器人結(jié)構(gòu)及優(yōu)點。宦朋松[11]提出了一種輪-腿復(fù)合式越障機器人(圖10),在平緩地區(qū)這種機器人具有輪式機器人的靈活、機動性好的特點,當其遇到障礙物時,伸縮肢在鏈輪機構(gòu)帶動下具有腿式機器人的跨越姿態(tài),環(huán)境適應(yīng)力更強。但目前對這種輪-腿復(fù)合式越障機器人傳動過程研究不夠深入,結(jié)構(gòu)部件的靜力分析需要深入研究。李一鵬[12]基于搖臂懸架結(jié)構(gòu)和行星輪驅(qū)動結(jié)構(gòu)設(shè)計了行星輪鏈接式越障機器人(圖11),這種機器人具有輪式機器人的較強機動性,也可以攀越超過自身高度的障礙物,越障性能獲得顯著提升。但這種行星輪鏈接式機器人結(jié)構(gòu)復(fù)雜、零部件多且容易損壞,對工作環(huán)境要求較高。

圖10 輪-腿復(fù)合式越障機器人

圖11 行星輪鏈接式越障機器人
2 機器人越障過程現(xiàn)存問題
經(jīng)過多年的優(yōu)化設(shè)計與研究,國內(nèi)外已經(jīng)在機器人越障技術(shù)取得了豐碩的成果,但距大規(guī)模應(yīng)用還有一定的差距。歸納起來有如下幾方面的問題:
(1)對履帶式機器人的越障性能的分析主要集中在斜坡、臺階、溝壑等傳統(tǒng)障礙上,對多圓管、窄而陡的樓梯等一些特殊障礙并未進行穩(wěn)定性分析。
(2)輪式機器人具有靈活輕便的優(yōu)點,但由于其自身結(jié)構(gòu)導(dǎo)致越障能力較差。
(3)機器人越障過程動力單一、動力系統(tǒng)體積大、質(zhì)量大,導(dǎo)致越障過程安全性不足及效率不高。
(4)機器人控制系統(tǒng)主要依靠液壓、氣壓驅(qū)動等直接控制方式,控制系統(tǒng)繁雜、操作繁瑣且占用機器人空間大,操作存在延緩。采用遠程遙控操作方式在電磁屏蔽環(huán)境下操作困難。
3 結(jié)論
機器人越障技術(shù)經(jīng)過幾十年的發(fā)展,目前正處于由實驗研究向?qū)嶋H應(yīng)用過渡的階段。隨著科學(xué)技術(shù)的發(fā)展以及越來越多的科研工作者對機器人越障能力優(yōu)化的重視,未來研究重點可能集中在以下幾個方面:
(1)控制智能化:機器人工作環(huán)境非常復(fù)雜,可能由于信號屏蔽致使通信中斷,機器人無法及時收到遠端控制指令,所以未來機器人需具備一定的智能控制能力,能夠適應(yīng)復(fù)雜工況。
(2)驅(qū)動精巧化:針對液壓、氣壓驅(qū)動等方式繁瑣且控制站占用空間大,電機驅(qū)動在易燃易爆場所使用受限等問題,設(shè)計出驅(qū)動精巧且本質(zhì)安全的新型直接驅(qū)動方式。
(3)多能集成化:定量研究不同作業(yè)環(huán)境條件對機器人越障能力的影響程度,設(shè)計具有可變結(jié)構(gòu)形式或可調(diào)結(jié)構(gòu)參數(shù)的機器人,滿足不同作業(yè)條件下對越障能力的需求。更進一步地,機器人可以通過智能感知作業(yè)環(huán)境,根據(jù)參數(shù)條件對自身結(jié)構(gòu)自主優(yōu)化調(diào)整或變換。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04