基于滑模觀測器和準觀測器的感應電機轉速辨識方法研究
2022-06-16 14:18:16蘭媛媛
裝備制造技術 2022年3期
李 曦,鮮 博,蘭媛媛,王 琪
(桂林航天工業學院 汽車工程學院,廣西 桂林 541000)
0 引言
感應電機具有結構簡單、堅固實用、維護方便、成本低廉的特點,在電動汽車領域得到了廣泛的應用[1-4]。然而,在感應電機高性能閉環調速系統中,轉速的反饋信號至關重要。通常需要使用旋變獲取轉速反饋信息,然而同時卻引入了一系列問題。首先旋變需要與電機輸出軸同軸安裝,使得電機軸向體積增大,破壞了感應電機結構簡單、維護方便的特點,同時若安裝不當,會影響轉速測量精度。其次旋變輸出側為模擬信號,需要對應的解碼芯片將其轉化為數字信號以便后續處理,使得控制系統變得更為復雜且成本增加。再次,旋變往往會受到極端工作環境的影響,在高溫、強磁場、高濕度的條件下,其測量精度和使用壽命都會受到影響。針對上述問題,無速度傳感器已經成為感應電機控制重要的技術需求之一[5-7]。
目前,科研人員已提出了多種感應電機的無速度傳感器技術實現方法,總體可以分為兩類,基于非理想化模型和基于理想化模型的方法[8]。前者最典型的應用是信號注入法,該方法在電機低速運行時具有十分優異的控制性能,但需要對電機進行重新改造,還存在高頻噪聲干擾的問題。實際工程中往往采用基于理想化模型的方法,該方法的觀測精度受制于電機參數的準確性和外界環境的條件。因此,觀測器的魯棒性是保證無速度傳感器感應電機控制系統穩定運行的關鍵。滑模觀測器法因對系統精度、數學模型精度要求低,設計靈活,對外部擾動具有較強的魯棒性,成為當前研究的熱點[9-10]。同時,很多學者將滑模觀測器和其他算法結合使用,演化出了多種結構,其觀測性能也有了顯著提升[11-12]。然而在這些結構中,多數都需要對電機磁鏈進行觀測,從而達到估計轉速的目的。
為此研究了一種無需對轉子磁鏈進行觀測的感應電機轉速辨識方法[13]。首先利用激磁電流向量iM簡化感應電機矢量控制Γ型等效電路,繼而建立激磁電流向量iM的狀態方程,接著構建關于激磁電流向量im的滑模觀測器,當滑模觀測器收斂時,可以得到等效滑模控制量Ueq,并據此構建一個準觀測器,通過李雅普諾夫穩定性理論得到轉速的自適應律,從而得到感應電機轉速的觀測值。最終通過Matlab/Simulink仿真驗證該方案具有較好的穩態性能、動態性能和參數魯棒性。
1 感應電機數學模型
在感應電機的靜止坐標系,電壓和磁鏈方程的表達式為:
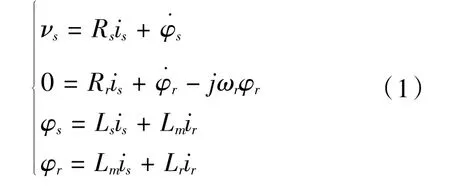
式中,νs為定子電壓向量,is為定子電流向量,ir為轉子電流向量,φs為定子磁鏈向量,φr為轉子磁鏈向量,為φs的微分,為φr的微分,Rs為定子電阻,Rr為轉子電阻,Ls為定子電感,ωr為轉速,j為虛部單位。
圖1為感應電機矢量控制的型等效電路,其中σ為漏磁系數,。
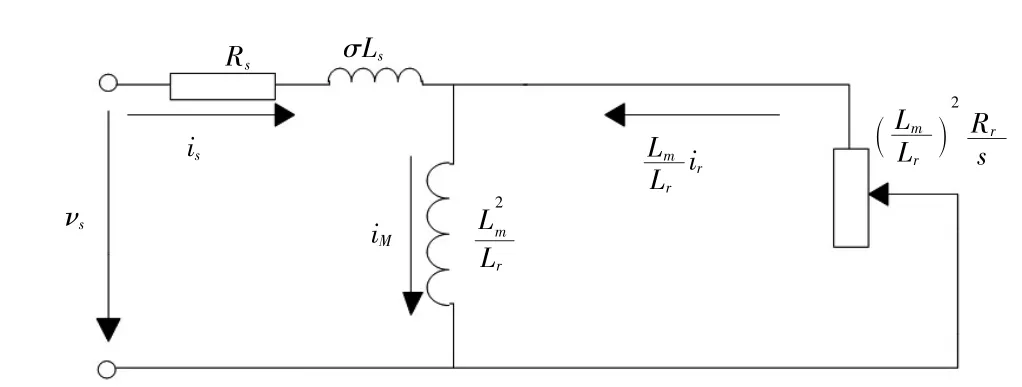
圖1 感應電機的型等效電路
如圖1所示,由基爾霍夫電流定律可得:

式中,iM為感應電機的激磁電流。
將公式(2)代入公式(1)中并化簡,可得激磁電流向量iM在靜止αβ坐標系的狀態方程為:
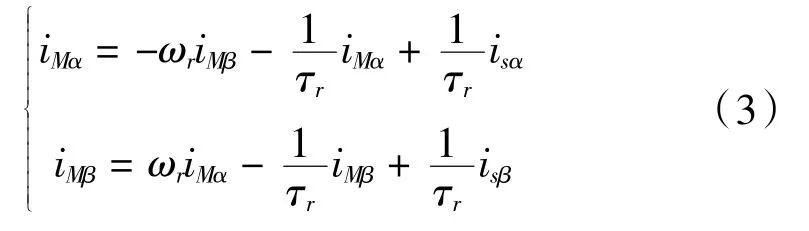
式中,τr為轉子時間常數,τr=Lr/Rr,iMα為激磁電流向量iM在α軸的分量,iMβ為激磁電流向量iM在β軸的分量,為iMα的微分,為iMβ的微分。
同時,在圖1中,由基爾霍夫電壓定律可得:

式中,為定子電流向量is的微分,為激磁電流向量iM的微分。
對公式(4)進行積分運算,并將激磁電流向量iM在靜止αβ坐標系進行展開,可得:
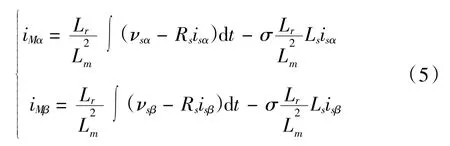
以上描述了兩種獲得激磁電流的方法。公式(3)通過感應電機定子磁鏈和轉子磁鏈之間的關系推導獲得,需要電機的轉速信息作為輸入,公式(5)通過感應電機型等效電路定子側的基爾霍夫電壓定律獲得,不需要電機的轉速信息作為輸入。據此可設計基于激磁電流的滑模觀測器,獲得含有轉速信息的等效滑模控制量。
2 轉速觀測器設計
2.1 激磁電流觀測器設計
以公式(5)獲得的激磁電流為參考變量,對公式(3)設計滑模觀測器為:

式中,U0為滑模控制函數增益,U0>0,sign為符號函數。
通過李雅普諾夫穩定性理論,可證該激磁電流滑模觀測器的收斂性。定義李雅普諾夫函數為:

對該函數求導可得:

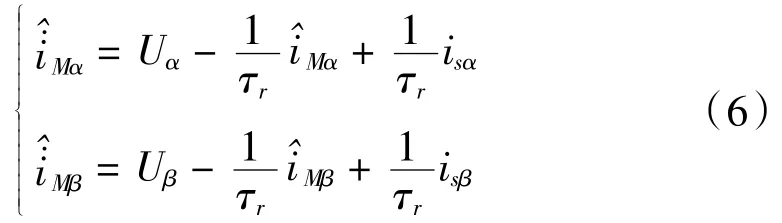
將式(6)與式(3)相減可以得到激磁電流觀測誤差的動態表達式:
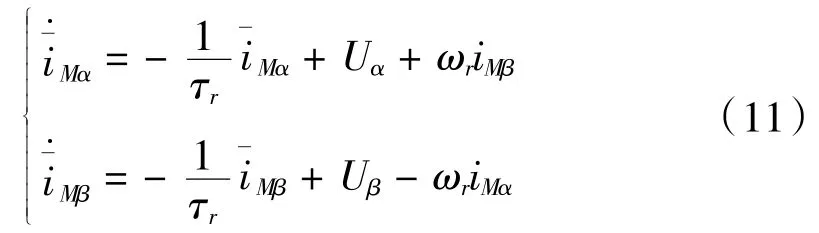
將公式(8)和公式(11)代入公式(10)中,可得:

當滑模控制函數增益U0足夠大時,此時<0,滑動模型將收斂到滑模面上,可得:

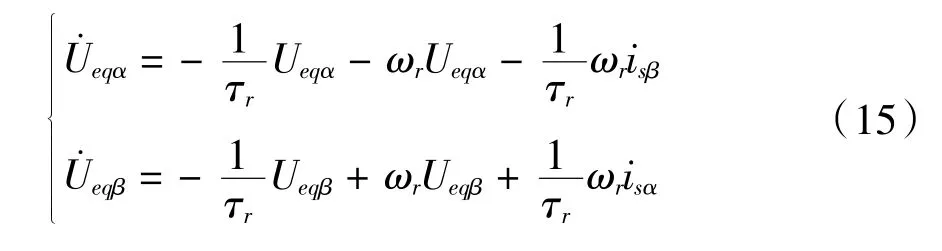
此時,將公式(13)代入公式(11)中,對滑模控制函數U低通濾波后可得等效滑模控制量Ueq,等效滑模控制量Ueq在靜止αβ坐標系的表達式為:

2.2 等效滑模控制量準觀測器設計
考慮到轉速等機械量的動態變化相比于電流、磁鏈等電氣量的變化較慢,在電氣時間范圍內可假設=0,對式(14)進行微分可得
對公式(15)構建準觀測器,其表達式為:
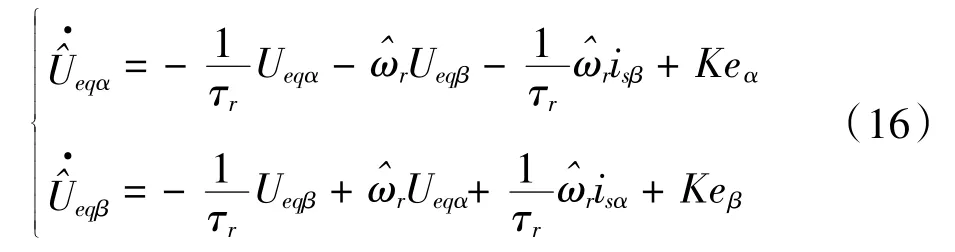
將公式(16)減公式(15)可得等效滑模控制量觀測誤差的動態方程。
定義李亞普諾夫函數為:

對李亞普諾夫函數Q求微分得:

式中,Q為的微分,為的微分。
將公式(17)代入公式(19)中得:
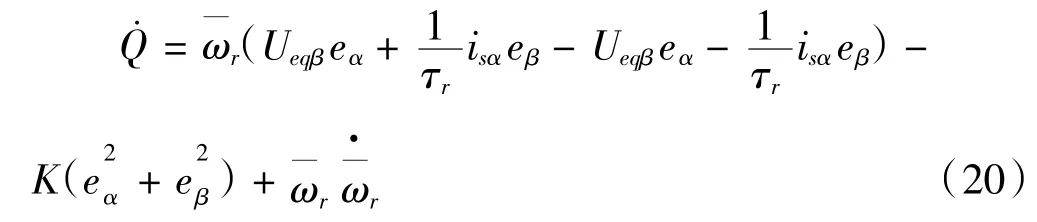
準觀測器的增益K>0,為滿足李亞普諾夫穩定性條件,令:

將公式(21)代入公式(20)中得:

此時,在自適應率(21)和準觀測器增益K>0的作用下,公式(22)小于0,eα和eβ收斂為0。
由于令轉速的微分ω˙r=0,對公式(21)進行積分運算后可得轉速的觀測值。

3 仿真結果分析
為了驗證上述所提方法的準確性,在MATLAB/Simulink搭建基于滑模觀測器和準觀測器的感應電機無速度傳感器矢量控制系統。系統結構圖如圖2所示。
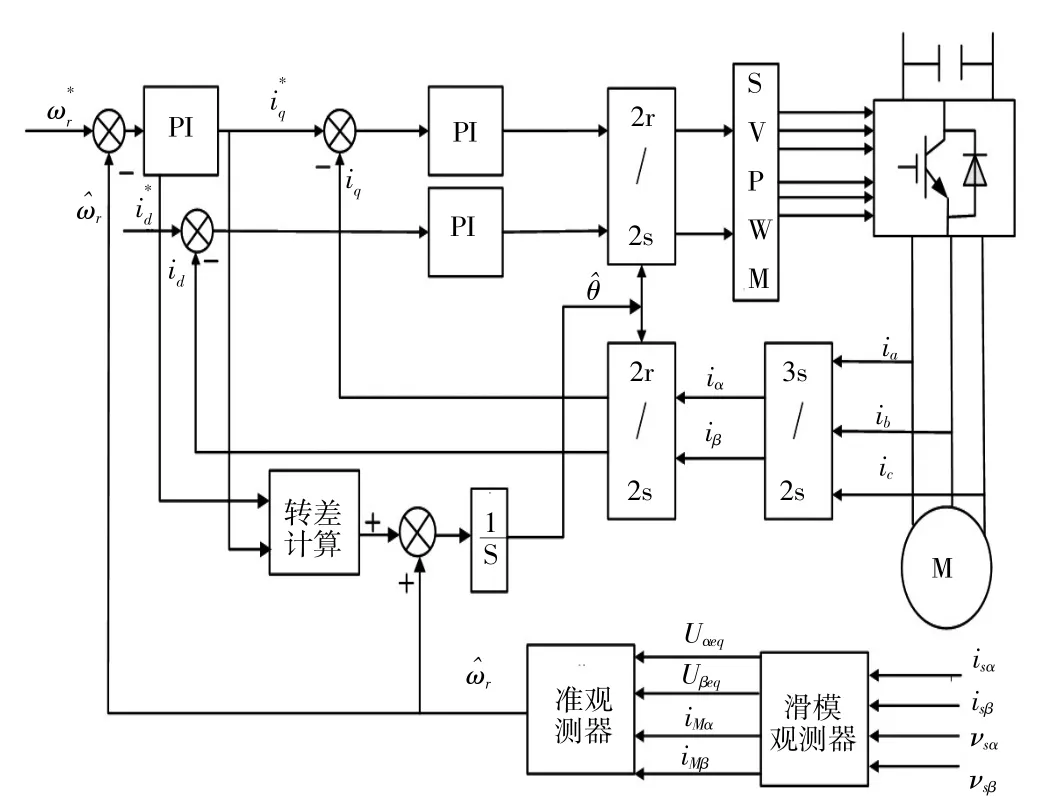
圖2 控制系統結構圖
其中,仿真電機的參數為:額定功率p N=2 kW,額定電壓UN=380 V,轉子電阻Rr=5.9Ω,定子電阻Rs=7Ω,勵磁電感Lm=0.55 H,轉子電感Lr=0.58 H,定子電感Ls=0.00227 H,極對數p=2,額定頻率fN=50 Hz。
在圖2中,滑模觀測器和準觀測器的轉速辨識結構圖如圖3所示。其中,滑模觀測器的參數K和準觀測器的參數U0取值會影響轉速辨識效果。取值越大,系統收斂速度越快,但同時會使轉速抖振現象明顯。因此,通過多次整定確定滑模觀測器中參數的給定值,U0=2000,準觀測器參數的給定值K=8000。

圖3 轉速辨識結構圖
在感應電機的數學模型中,轉子電阻由于受到溫度的影響,最易發生改變。在圖5中,轉子電阻由原始阻值變化至百分之五十,轉速ωr由0 rad/s階躍至100 rad/s,在該閉環仿真波形中,可以發現轉子電阻Rr的變化對轉速觀測結果無影響,控制系統對轉子電阻具有較好的魯棒性。較好地跟蹤參考轉速,激磁電流觀測值和等效
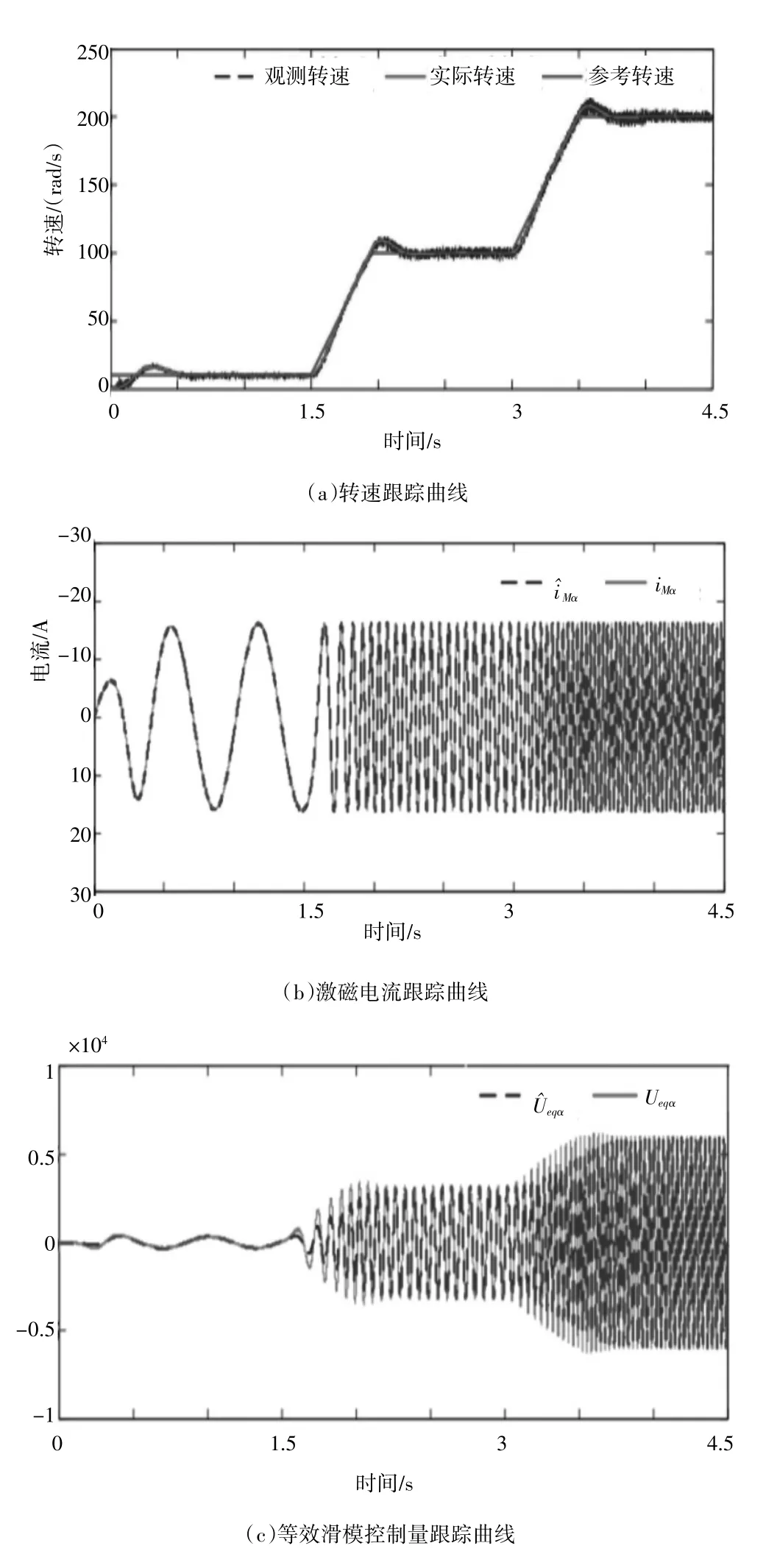
圖4 轉速指令斜坡響應過程

圖5 轉子電阻魯棒性仿真圖
4 結語
以感應電機的型等效電路的激磁電流為狀態量構建了滑模觀測器,并通過對其等效滑模控制量的準觀測器設計獲得轉速信息。該方法無需對電機磁鏈信息進行觀測,為感應電機無速度傳感器的設計提供了一種新的思路。同時為了驗證該方案的準確性和穩定性能,論文以Matlab/Simulink為仿真平臺,驗證了該方案的穩態性能、動態性能以及轉子魯棒性。