基于密集匹配算法的數字高程模型數據優缺點解析
2021-05-16 09:23:48姜陽張俊
經緯天地 2021年1期
姜 陽 張 俊
(1.黑龍江省測繪產品質量監督檢驗站,黑龍江 哈爾濱 150081;2.黑龍江第二測繪工程院,黑龍江 哈爾濱 150081)
0.引言
基于密集匹配算法的數字高程模型數據(即DEM數據)生產方式,主要是對衛星影像的每個立體像對進行密集匹配,并通過前方交會計算出每個物方點的三維坐標,從而得到整個區域的數字表面模型數據(即DSM數據),再經過人機交互編輯濾波,將高于地面的林地、房屋、橋梁以及臨時堆放物等非地面附著物的高程降至地面,最終得到DEM數據成果。其中,密集匹配是指在生產DSM或DEM數據時,為了計算測區每個物方點的三維坐標,從而重建整個測區地形而進行的同名點匹配。
基于密集匹配算法的DEM數據生產近幾年從實驗走向了大規模應用,主要源于國家建設對于DEM數據的迫切需求,部分區域甚至需要DEM數據的更新周期達到一年以內,“一帶一路”國家戰略更是需要全球范圍內的DEM數據。因此,傳統的長周期的DEM生產方式已經無法滿足項目需求,基于密集匹配算法的DEM數據生產則可較好地解決此類問題。近年來,由于我國高分辨率衛星影像獲取能力極大增強,使得大規模快速生產DEM數據成為了現實。
相比于傳統的DEM數據生產方式,基于密集匹配算法的DEM數據生產效率高、范圍廣、時效性更強、模型表達更加精細,但在某些方面,又有其自身的不足。下面筆者將在各個方面對其優缺點進行詳細地分析和闡述。
1.生產效率和覆蓋范圍方面
基于密集匹配算法的DEM數據生產效率更高。傳統的DEM生產方式主要是人機交互立體采集高程點、線,并以此為基礎內插構建高程模型。這種方式人工參與度較高,因此對于人工的依賴較大,作業人員的熟練程度和經驗的積累對生產效率起著至關重要的作用。根據實際生產周期計算,1∶50000比例尺山地類型的數據生產平均每幅圖需要約40-50天的工作量。而基于密集匹配算法的DEM數據生產從自動匹配生成DSM數據到影像粗糾正,再到DEM數據編輯僅需要約12天左右的時間,如若大規模生產平地或無植被區域則效率更高。在基于密集匹配算法的DEM數據的整個生產環節中,從衛星影像立體相對的密集匹配,到通過前方交會計算物方點的三維坐標,再到DSM模型數據的生成,基本可以做到全自動化,因此可以安排在任意時間段進行數據生產,極大地提高了工作效率。此外,對于后續的人工編輯環節,由于是將已經生成的DSM模型作為底圖,需要降高的區域僅為林地、建筑區、橋梁等明顯的高于地面部分,在沙漠、戈壁等地物稀少的區域甚至無需降高處理,可以將DSM數據直接作為DEM數據使用,因此極大地降低了人工作業的強度和難度,對于作業人員熟練程度的要求也不如傳統DEM生產要求那樣高。經過測算,項目的平均生產效率相對于傳統生產方式整體上提高了5-8倍,可滿足在1∶50000比例尺下,全國范圍內DEM數據每年一次頻率的更新要求。這將極大地提高DEM數據的可應用性,能夠對同一區域進行連續不間斷的地形監測,對于突發的地形變化,如地震、山體滑坡等也可在短時間內制作特定區域的DEM模型。
基于密集匹配算法的DEM數據生產的成圖范圍更廣。基于密集匹配算法的DEM數據可實現覆蓋全球所有的陸地范圍(個別影像無法獲取的特殊區域除外),并可根據需要在5-8年內對全球的陸地范圍進行更新。這個目標能夠得以實現主要是源于以下幾個技術條件的逐漸成熟:
1.1 我國衛星影像資源獲取能力極大加強
近年來,我國自主研發并成功發射了多枚氣象、海洋、資源等民用遙感衛星系列及環境減災衛星星座,資源三號、天繪、高分等影像的大范圍獲取為高精度DEM成果的生產提供了多重覆蓋的數據源,保證了影像數據獲取的數量和質量,其范圍可覆蓋全球,因此生產中可根據實際需要來選擇合適的影像源。
1.2 無地面控制測圖關鍵技術的突破
衛星的密集時序化在軌幾何定標能夠提供任意時間點衛星的坐標以及姿態角等重要參數的信息,這些信息的獲取可以極大地減少測繪生產對于地面控制的依賴,并利用大范圍的區域網平差技術使DEM成果的高程精度得到了極大提高和保障。此外,全球統一大地基準的確定將全球范圍的DEM數據納入了統一的標準之下,這使得我們的眼光不僅局限于國內,可以將全世界的DEM數據在同一尺度下進行生產、分析、比較,為DEM數據應用打開了廣闊的前景。
1.3 眾源地理信息快速融合、海量信息在線發布技術
國際海量信息的在線共享,特別是格網寬度為30m的SRTM數據和AW3D30數據獲取為我們提供了大量輔助的參考資料,可為密集匹配DEM數據的提供精度參考,也可為空白區域提供漏洞補充。
密集匹配DEM數據生產的范圍更廣除了以上三個條件的技術支持,也是源于其更高的生產效率,這種方法能夠在規定的時間內,使生產范圍擴大幾倍,可應用性更強。因此基于密集匹配算法的DEM數據生產方式可廣泛應用于軍用和民用領域,目前,我國主導的“一帶一路”戰略已開始大規模應用此技術。
2.高程精度方面
DEM成果的高程精度取決于多方面的因素,如影像質量、地形類別等。這里采用的影像源主要是1∶50000比例尺DEM數據生產常用的資源三號衛星影像,影像分辨率為2m,并將對比區域設定為國內同精度區域網范圍內的同一區域。基于密集匹配算法的DEM數據在不同的地形類別下,相對于高精度檢查點目前所能達到的高程中誤差(如表1所示):

表1 基于密集匹配算法的DEM數據相對于高精度檢查點的高程中誤差
采用傳統生產方式的DEM數據相對于高精度檢查點所能達到的高程中誤差(如表2所示):
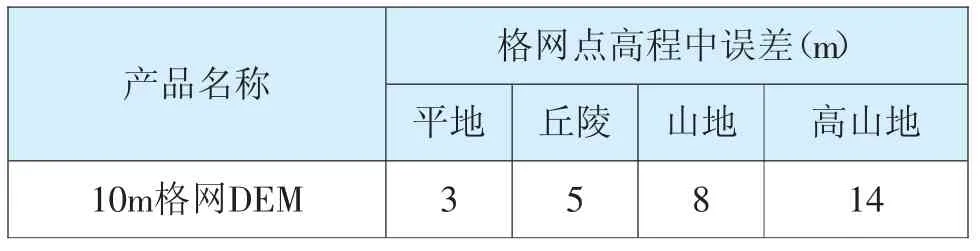
表2 傳統生產方式的DEM數據相對于高精度檢查點的高程中誤差
從以上兩種方式的高程精度對比中,我們可以看出,基于密集匹配算法的DEM數據在平地區域,精度相較于傳統方式要稍微差一些,而在其他三種地形類別中與傳統方式的精度基本一致,甚至在高山地還要優于傳統方式。這主要是因為密集匹配算法主要是根據影像中不同地物之間的紋理差異來匹配生成高程模型。在平地區域弱紋理區較多,地物特征不明顯,出現的粗差點和錯誤地形也較多,匹配效果不好;而山地影像信息更加豐富,地物特征明顯,明暗對比強烈,匹配效果反而要好一些。傳統生產方式主要是根據不同視角的遙感影像生成立體模型并進行人工采集,由于視覺原因,地面起伏對高程精度所造成的影響更大。但是由于密集匹配算法的大部分生產環節為自動識別匹配,相對于衛星與地面之間的高差,地面起伏所造成的差異就顯得微乎其微了。此外,在1∶10000比例尺下,利用高分七號衛星影像(影像分辨率為0.8m)的試生產實驗中,也呈現出了類似的特性。由此可以看出,基于密集匹配算法的DEM數據與傳統方式生產的DEM數據相比,在整體上高程精度的差別并不大,且通過后期的精細編輯處理,不同匹配軟件和不同匹配參數的調整還可以適當彌補高程精度的不足。
3.視覺效果方面
基于密集匹配算法的DEM成果可以直接通過匹配獲取像素的高程值,從而形成最終的柵格數據,而不需要采集傳統的高程點線等矢量數據。因此,基于密集匹配算法的DEM成果是連續的不間斷的數據,相對于傳統方式DEM成果無高程點線的內插區域就會更加真實準確,模型生成的暈渲效果也更加細膩。圖1和圖2是在Global-mapper軟件下顯示的DEM暈渲效果對比圖:
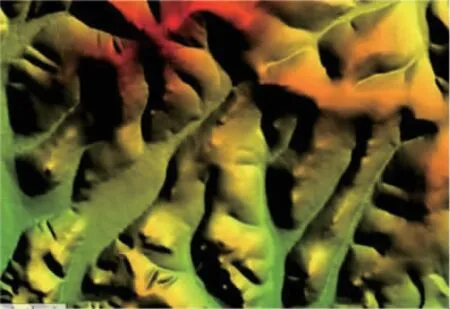
圖1 密集匹配DEM數據暈渲效果圖
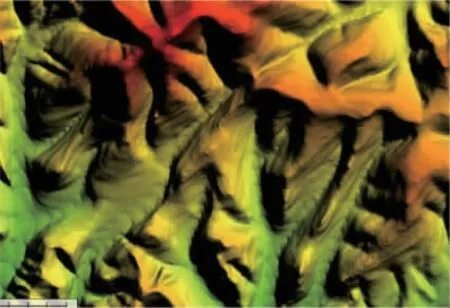
圖2 傳統方式DEM數據暈渲效果圖
基于密集匹配算法的DEM成果所生成的暈渲效果(如圖1所示)能更加連續地表達地貌特征,地形的起伏不會斷裂,更接近真實地貌;而傳統的DEM成果(如圖2所示),則會呈現出梯田狀的效果,這是由于在兩根等高線之間,傳統DEM模型只能呈現同一高程值。在整個模型的視覺效果方面,基于密集匹配算法的DEM成果顯然要優于傳統方式。
4.表達精細度方面
現階段,我國在1∶50000比例尺下采用資源三號衛星影像生產的DEM數據格網寬度多為10m。由于基于密集匹配算法的DEM數據的暈渲效果更加連續,因此在部分微地貌的表達中更加真實,特別是對某些高差較小的地貌表達更加細致。可以說基于密集匹配算法的DEM數據后期可以采用任意等高距來生成等高線,而傳統方式生產的DEM數據則只能根據生產時的等高距來生成等高線。在同一地區(如圖3、圖4所示),基于密集匹配算法的DEM數據可清晰地表示出河流的細部形態,而傳統方式的DEM數據由于等高距的限制僅能表示出平坦地貌,而沒有河流的痕跡。
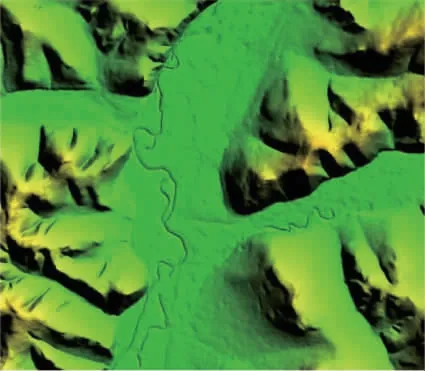
圖3 密集匹配DEM數據河流細部表達
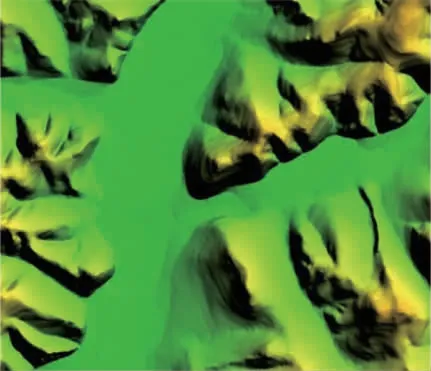
圖4 傳統方式的DEM數據無河流痕跡
然而,基于密集匹配算法的DEM數據也有其局限性。在有地物遮擋區域,如何判斷地物相對高度,并將DSM數據降至真實的地面一直是DEM數據生產中的一個難題。而且在DSM自動匹配過程中,有些高程點匹配至地面,有些則匹配至地物的頂端或中間位置,同種地物點云匹配位置的不同更加大了地物相對高度判斷的難度。如果地物相對高度判斷不準確,就很容易出現錯誤的“人造”地貌。
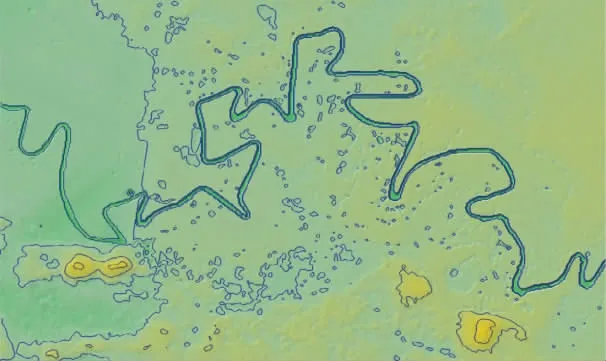
圖5 河灘處的坑狀地貌
由于相對高度判斷不準確,導致林地降高不足,從而使河灘處出現錯誤的坑狀地貌(如圖5所示)。而這種問題在某些區域是極難避免的,因為我們不可能針對像素逐個降高處理,只能盡量分割縮小單個的編輯范圍,將這種問題控制在可達到的精度范圍內。
在山地和高山地區域則分為兩種情況。對于山形較大且形態相對完整的區域(如圖6所示),基于密集匹配算法的DEM數據可以將地形表現的更加清晰準確,整體趨勢和微地貌形態都可以細致地表現出來,總體能夠達到優于傳統1∶50000比例尺成果生產方式等高線的要求(如圖7所示):

圖6 形態完整的大型山體地貌影像
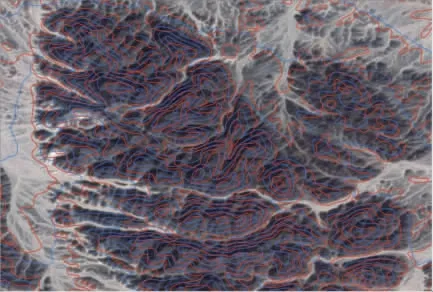
圖7 密集匹配DEM生成等高線(藍色)與傳統方式DEM生成等高線(紅色)對比
而在破碎地貌區域,基于密集匹配算法的DEM數據則體現出了其局限性。破碎地貌,顧名思義,是山體在常年的風化作用下,形成的如刀削斧劈般縱橫交錯的極端破碎地形(如圖8所示),其特征是小型的溝谷或山脊等微地貌形態較多,一般谷底寬度不超過20m,為實際生產帶來了巨大的編輯工作量。

圖8 破碎地貌影像
根據生產實踐的經驗來看,一般溝谷和山脊寬度至少需要達到30m才能夠完整、準確地表達出地貌特征。因為柵格數據生成的點云高程取值在像素的中心位置,同一像素范圍內高程值一致,因此僅有一列或兩列點,大部分點位會落在山坡位置,無法準確地落到谷底地面,山脊也類似。
由于破碎地貌山體兩側沖溝等細部地貌較多,且溝谷和山脊較窄,無法達到30m寬度的要求,因此DEM模型僅能適度表達出整體的地形趨勢和地貌特征,而無法準確表示出谷底高程(如圖9所示):
而傳統DEM數據在人工立體采集的生產過程中則可以根據人為判斷適當夸大地貌特征,對等高線進行微加工,從而使微地貌的特征更加明顯(如圖10所示)。通過對比發現(如圖11所示),部分寬度在30m以下的溝谷,基于密集匹配算法的DEM數據無法體現出來,生成的等高線趨于圓滑,微地貌丟失,而傳統DEM數據則可以根據人工夸張表示把微地貌特征表現出來。
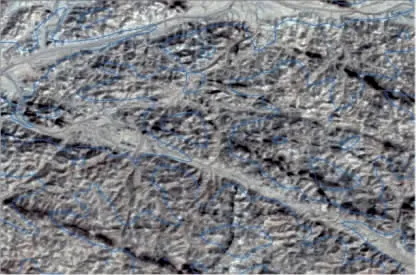
圖9 密集匹配DEM生成等高線(藍色)與影像套合
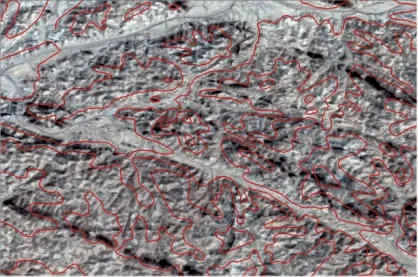
圖10 傳統方式DEM生成等高線(紅色)與影像套合
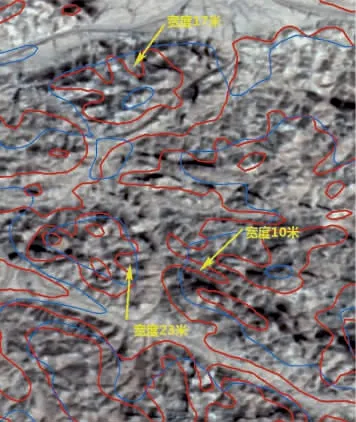
圖11 密集匹配DEM等高線(藍色)與傳統方式DEM生成等高線(紅色)差異對比
5.結束語
相比于傳統的DEM數據生產方式,基于密集匹配算法的DEM數據在生產效率、范圍以及視覺效果方面的優勢明顯,在高程精度對比方面則略低于傳統方式,而在地形表達的精細度方面,除幾種特殊情況外,則要強于傳統方式。由于其在生產效率上的巨大優勢,可極大地提高數據更新頻率,擴大數據生產范圍,現階段的DEM數據生產基本上都開始采用此種方法,可以說基于密集匹配算法的DEM數據生產方式已經發展到較為成熟的階段。近幾年,在大范圍更新生產DEM數據的項目中,基于密集匹配算法的DEM數據生產方式已成為主要的技術手段。隨著更高分辨率影像源的使用,DEM數據格網寬度將進一步縮小,地貌表達將更加準確、精細,而隨著技術手段的不斷優化,其效率也將進一步得到提高。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
中國軍轉民(2017年6期)2018-01-31 02:22:28
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
汽車零部件(2014年11期)2014-09-18 11:57:16
機械制造文摘(焊接分冊)(2014年5期)2014-03-20 13:57:44