三維激光掃描技術立面測量關鍵技術與應用
2021-05-16 09:25:10汪文
經緯天地 2021年1期
關鍵詞:測量
汪 文
(廣東友元國土信息工程有限公司,廣東 廣州 510000)
0.引言
立面圖是建筑物投影到與其平行的平面后獲得的投影線垂直于基本投影面的正投影圖,稱為建筑立面圖,簡稱立面圖[1],建筑物立面圖是城市改造、建筑物內外部裝修重建的關鍵依據,是施工設計順利進行的重要保障。精確繪制的立面圖能清晰展現出建筑物外部特征以及立面裝修情況,同時能夠反映墻體的表面、窗戶、陽臺、遮陽板、臺階、勒腳、雨棚、門、柱子等細節構造以及各部位尺寸大小。立面圖根據不同的分類方法可以分為不同的種類,一般有3種分類方法:(1)以建筑物兩端定位軸線分類;(2)以建筑物墻面朝向進行分類:南立面、北立面、東立面、西立面[3];(3)以建筑物特征命名:正立面、背立面和側立面。
三維激光掃描技術通過激光脈沖無需配合其他設備,不接觸被測物體,主動測量,實現了點云數據大面積、高分辨率地快速采集。點云數據是大量三維坐標點的集合,點云中可提取出被測目標,線、面、體等空間結構信息,并根據采集的點云重構出實體目標的真彩色的三維模型,是一種實景復制技術。
傳統測量方法只能通過皮尺、測距儀等技術低的測量工具,對建筑物的立面進行長、寬、高等方面的數據采集。同時這類測量方法存在耗時長、費用高、效率低等缺點,這就給立面測量增加了很大難度。而目前三維激光掃描技術在進行立面測量時無需接觸掃描,可快速以點云數據的形式采集建筑物外立面的數據,極大程度縮短了將采集到的點云數據轉換成計算機可以識別處理的數據的時間。與傳統測量方式相反,這種測量技術具有耗費時間短、精度高、效率高、實時接收、數字化等優勢,這為測量建筑物的外立面圖提供了一種更快、更方便的測量方法[3]。因此具有容易受到外界環境影響的特點。傳統的測量方法在立面測量中逐漸被淘汰,而三維激光掃描測量技術逐漸被人們熟知與使用。
1.三維激光掃描立面測量關鍵技術
1.1 三維激光掃描技術原理
三維激光掃描系統的構成可分為3大部分,包括電源部分、控制部分(計算機)、掃描儀。掃描儀作為三維激光掃描系統的關鍵組成,其內部主要可分為激光掃描和激光測距兩大部分,除此之外掃描儀內部還兼有CCD、控制和校正系統等,其測距原理是通過計算激光脈沖發出后經被測物體反射返回傳感器的相位差,從而得到目標點P到掃描儀的距離D。掃描儀的反射鏡進行快速旋轉,不斷發射窄束激光脈沖,同時再由掃描控制模塊測量每個脈沖激光的橫向掃描角度觀測值a和縱向掃描角度觀測值b,這樣就得出了角度和距離,從而就可以計算出P點的三維坐標[4](如圖1所示):
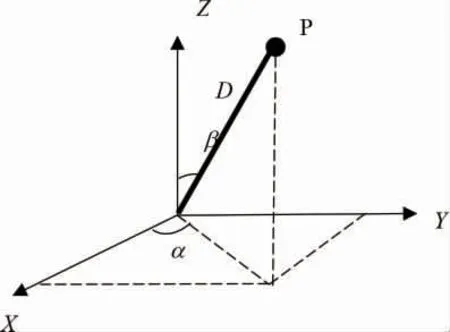
圖1 三維激光掃描坐標計算

1.2 三維激光掃描技術優勢
(1)對實測目標要求較低。由于大多數文物古建筑等不能進行近距離接觸,而且年久失修工作人員無法接觸,三維激光掃描儀能完成這類要求,不用與被測物體接觸,能在測量人員難以到達或危險較大的地區進行測量。
(2)觀察環境要求低。大部分三維激光掃描儀具備較高防水性,雨天或夜間均可進行測量工作。
(3)測量精度高。可以滿足建筑立面測量的精度要求。
(4)豐富的數據采集。全站儀獲取目標特征點的數據存在局限性。三維激光掃描儀的高采樣率,更詳細地繪制測量物體,并且當出現不滿足要求的問題時,無需進行重測,只需調出測量的點云數據進行檢查并修改。
(5)無需瞄準,全方位測量,自動化程度高,外業工作效率高。
1.3 數據采集及處理流程
外業數據掃描采集決定點云數據質量的好壞,首先需要進行現場環境勘查,初步制訂外業采集計劃。采集時需考慮掃描的精確度、數據重疊度等情況。外業采集技術要點包括:采樣間隔、設站位置以及數據質量檢查等。
(1)采樣間隔。采樣間隔的大小決定數據質量的好壞,根據要求選擇采樣間隔,一般情況采樣間隔小、數據量大,數據分辨率高、質量較好,但采集時間較長,通常圖紙與建筑實物的比例小于1∶100時,采樣間隔可選擇8mm[5]。
(2)選擇設站位置。根據前期勘查工作選擇初步設站位置,并根據現場臨時情況合理選擇設站點,保障重疊率,提高外業采集數據質量與外業采集效率。在現場遮擋情況小,視線開闊的區域可增加兩測站距離,在現場情況復雜,靠近被測目標時可加密測站。同時針對建筑物特定細部特殊要求可進行多次重復掃描,以提高該位置清晰度。
(3)數據質量檢查。每測站完成后需進行數據初步檢查,檢查內容包括,被測目標主體情況,是否受瞬時環境(如,行人、車輛等)影響,確保重要內容不被遺漏,同時顧及后期點云拼接,檢查重疊率是否滿足,一般需保證30%.重疊率,存在問題時,需增加測站重復采集,檢查無誤后可進行下一測站的數據采集。
三維激光掃描建筑物立面測繪流程(如圖2所示):
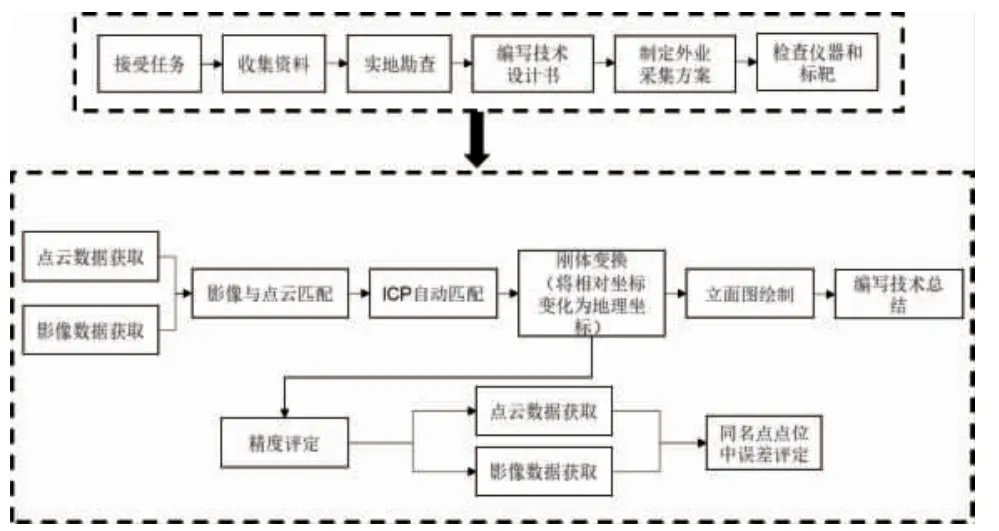
圖2 三維激光掃描建筑物立面測繪流程
2.點云預處理
2.1 點云去噪
三維激光掃描儀在進行外業工作時會將被測物周圍進行實景復制,在被測物周圍能反射脈沖信號的物體均能被采集,由于掃描的數據種類繁多,因此初步采集完成的點云數據存在大量的噪點,類似樹木、道路、車輛等,多出來的噪點會增加數據存儲空間,減緩生產進度,影響正常工作,選擇其中一些不需要的點,需要對其進行去噪處理[7,8]。進行點云去噪處理選擇使用RISCAN PRO軟件。點云人工去噪過程中,一般將視圖設置為正射,方便噪點刪除,減少出錯提高測繪數據的準確性。對于明顯的噪點,可通過軟件視角轉換功能,不斷轉換視角,進行人工手動刪除。存在數據過大的問題,可對其進行分區處理(如圖3所示):

圖3 局部區域圖截取
圖3中,道路兩旁的樹木是不需要的數據,需要剔除掉。全選該區域,單擊Riscan中“Terrainfilter”按鈕,在settings選項里設置成“Vegetation”,單擊OK(如圖4所示):
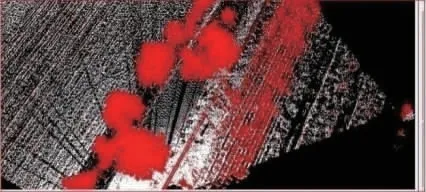
圖4 區分后效果圖
紅色所選的即為需要剔除的數據,將其刪掉完成去噪。
2.2 點云拼接
2.2.1 粗拼
點云拼接是兩兩進行拼接,首先選擇需要拼接的數據,以一個站為基準站,即這個站不發生移動,操作:右擊基準站選擇第一個,彈出一個操作欄。以第一站為基準站,通過選擇translate(距離)和rotale(旋轉),這里選擇use fixed offset 通過更改變化尺度進行移動和旋轉,這里設置一般從大到小進行設置(1,0.5,0.2),通過點擊control下的坐標系,利用鼠標左右鍵控制方向,將兩個點云數據大致拼接到一起。同理若有多個站,則每兩站進行拼接,拼接好的數據設定為基準站,進行粗拼工作。
2.2.2 構建三角形平面
通過點擊測站前面的地球可以顯示和隱藏測站點云數據,利用工具欄中的將測站的數據進行全部選擇,點擊工具欄中的Polar trianglation進行構筑三角形平面,輸入最大三角邊,三角形最大內角、最小內角、深度值,確定就能構筑出三角形。
將所有測站都構筑完三角形,點擊Registration-start adjustment(如圖5所示):
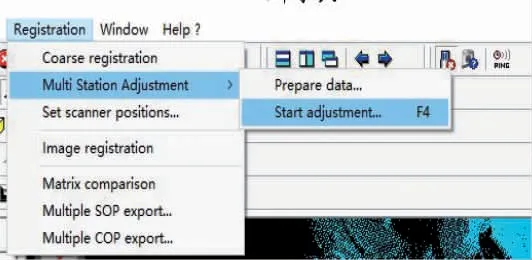
圖5 數據記錄
2.2.3精拼
選中所要精拼的測站右擊選擇Edit,出現兩組數據,一組是指平移限制,下面是旋轉限制,例如,兩個測站的誤差是0.5,它精拼移動不能低于0.5需要設置一個上限限制它的范圍,一般上限設置的要求要比原始誤差大一個數量級,這里上限可設置為0.5,下限可設置為0.05點擊ok。
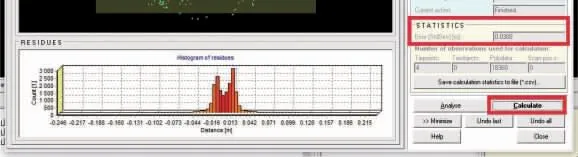
圖6 拼接精度
拼接精度窗口(如圖6所示)所出現的評價中誤差一般為2-3cm,通過調整角度、距離等要素,進行精度控制。
然后通過右擊其他測站進行精拼,或者通過右下方的調整,仍舊是從大到小進行設置變化尺度,進行調整,最終完成點云拼接工作。選擇鎖站可以鎖住平面,但是不鎖住旋轉,選擇完全鎖站表示既鎖住平面,又鎖住角度。
再次點擊TPL(PRCS),刪除里面的數據。然后依次點擊每個測站的TPL(PRCS),將里面的數據復制到總的TPL(PRCS)中去。(TPL(PRCS)內是人工選擇的中心位置,與實際位置之間會有一定的偏差,需要進行偏差消除才可進行的精拼,精拼完之后這些位置都發生了變化,會導致數據不準確,甚至出現錯誤,需把精拼生成的數據復制到里面,替換原有數據)。點擊總的TPL(PRCS),選擇整個數據。將誤差控制到1cm以內,完成所有拼接工作。
拼接的思路主要是以控制點為基準,每個測站都有自己的一個獨立坐標系,首先我們通過選取的反光片中心坐標與實際坐標相互匹配,匹配之后完成粗拼,將所有的獨立坐標系轉換到工程坐標系中,進行精拼,精拼之后匯總到一起與已知控制點聯系,從而使每個點轉化到大地坐標系中。
提高點云數據精度的措施主要包括以下幾個方面:(1)合理設置三維激光掃描儀器的參數,由此可以提高掃描數據的準確性;(2)設置有效的參考點,由此改進掃描的數據;(3)盡量避開不利的外部環境,由此提升掃描的質量;(4)提高測站之間的公共區域的點云數據的重疊度從而進一步提升拼接的精度;(5)根據不同儀器的精度,控制合理的掃描范圍。
2.3 立面圖繪制
點云拼接完成后,進行點云分割,并將點云轉換到正立面方向生成dxf文件[9],(如圖7所示),將dxf文件導入CAD,以dxf為底圖繪制建筑物立面細節(如圖8所示):
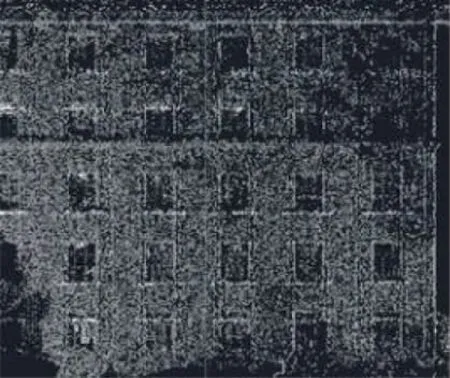
圖7 部分點云分割正立面圖
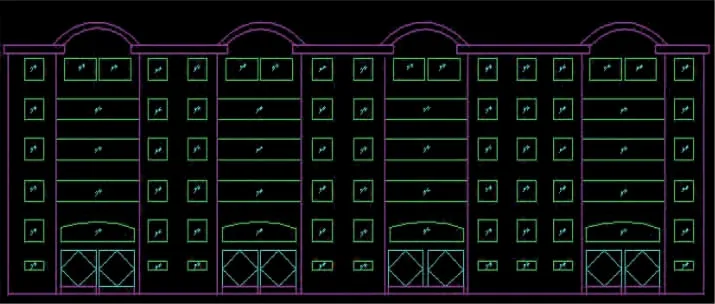
圖8 建筑物立面細節
3.精度分析
根據《GB 50026-2016工程測量規范》要求對建筑立面圖成果圖進行平面位置及高程精度進行評定[10],點云中誤差(如表1所示):
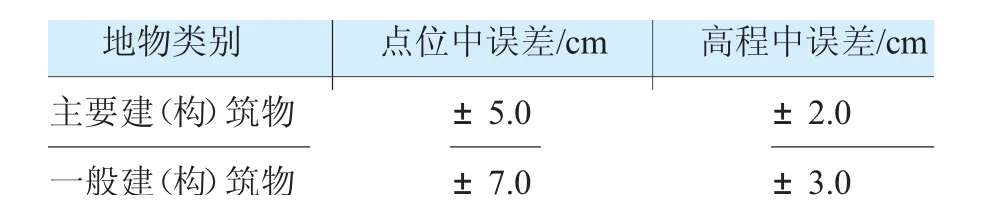
表1 點云中誤差
共選取9個檢差點進行精度評定,精度分析(如表2所示):
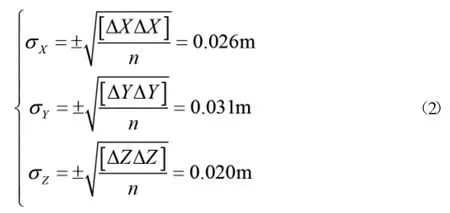

表2 平面及高程中誤差統計表
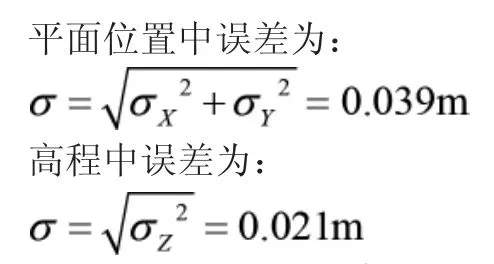
由以上結果并參考《GB 50026-2016工程測量規范》可得,三維激光掃描技術進行立面測繪所獲成果精度滿足要求。
4.結束語
傳統全站儀獲取目標特征點的數據存在局限性。三維激光掃描技術完成了傳統的單點測量方式的巨大改變,具有高速、不用接觸被測物體、密度大、自動化,出現不滿足要求的問題時,無需進行重測,只需調出測量的點云數據進行檢查并修改。同時三維激光掃描技術不需要合作目標,不與被測物體接觸,能在測量人員難以到達或危險復雜的地區進行測量。
本文討論了從外業數據采集的關鍵技術、點云預處理、立面圖成果精度評定等方面詳細總結了三維激光掃描技術建筑物立面測繪關鍵技術,實踐證明該方法具有很好的適應性,同時掃描儀易受建筑物周圍樹木遮擋,測量選站存在難度,數據噪點較多,點云自動化去噪將是接下來研究的重點內容。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00