嫦娥三號軟著陸軌道設計與最優控制策略的數學建模
2020-09-10 07:22:44楊月嬌
天府數學 2020年3期
楊月嬌









摘 要:本文具體介紹了嫦娥三號在月球軟著陸軌道的設計與具體控制策略問題,在合理假設的基礎上,建立了合適的數學模型,給出了嫦娥三號月球軟著陸軌道的設計和控制策略,并對其誤差和靈敏度進行了分析。根據開普勒第三定律,得到了嫦娥三號著陸準備軌道的近月點和遠月點的位置以及嫦娥三號相應速度的大小和方向。為了保證嫦娥三號能夠順利到達月球之后降落在月球表面,同時,對外太空環境下各種因素所造成的干擾能夠有效對抗。本文建立對嫦娥三號軟著陸全過程六階段的軌道參數、速度增量需求、燃料消耗、著陸精確度進行了分階段計算和分步優化,制定了嫦娥三號軟著陸軌道設計與最優控制方式。在各階段分別建立了模型(5.2.1.1.1),模型(5.2.1.2.1),模型(5.2.1.6.1),模型(5.2.2.1),模型(5.2.2.6),對所需參數進行求解,并進行優化設計。建立了基于BP神經網絡的數學模型,對著陸軌道設計和具體控制策略方案實施了誤差和靈敏度分析。最后,在充分考慮誤差的情況下,用計算機對方案進行初步模擬仿真,仿真結果表明,本文提出的軌道設計與最優控制策略方案是可行的。
關鍵詞:嫦娥三號;軟著陸;軌道設計;最優控制策略;BP神經網絡系統
1.建模背景
2013年12月2日1時30分,嫦娥三號,成功發射,并于12月6日到達月球軌道。長三號目標工程是實現月球的軟軸路探測和月球的表面巡視。月球到軟著陸,是指月球的著陸器,通過訂閱轉換在月球附近,著陸在剎車系統的制動作用下,以很小的速度在月球表面垂直降落,以確保嫦娥三號內部的實驗設備的完好無損和航天員的安全。[1]嫦娥三號在沒有大氣環境下,不能依靠降落傘著陸,只能靠變推力發動機來完成中途修正、近月制動、動力下降、懸停段等軟著陸任務。月球軟著陸分為2種形式:一種是將地球軌道轉移到月球上,直接實現軟著陸;另一種是將月球停放軌道改為靠近月球的點,然后實現軟著陸。自環月停泊軌道開始的軟著陸可大致分為兩個部分:一部分是軌道轉移,另一部分是軌道下降。[1]如圖1所示即為第二種軟著陸形式。霍曼轉移軌道即嫦娥三號的著陸準備軌道。在著陸準備軌道上,嫦娥三號的運行質量為2.4t,安裝在嫦娥三號下部的主減速發動機可以產生1500N到7500N的可調節推力,比沖為2940m/s,基本滿足調整速度的控制要求。
軌道下降部分共分為六個階段:(1)著陸準備軌道的近月點是15KM,遠月點是100KM,著陸點的位置由近月點在月心坐標系的位置和軟著陸軌道形態共同決定。(2)主減速段:主減速段區間是距離月面15km到3km,嫦娥三號要在這個階段實現到距離月面3公里處速度降為57m/s。(3)快速調整階段:通過調整探測器姿態,做到從距離月面3km到2.4km處將水平速度減為0m/s,使主減速發動機的推力豎直向下,進入下一階段。(4)粗避障階段:范圍是距離月面2.4km到100m區間,在這個階段要做到能夠避開大的隕石坑,實現在設計著陸點上方100m處懸停,并初步確定落月地點。(5)精細避障段:區間是距離月面100m到30m,要求嫦娥三號懸停在距離月面100m處,對著陸點附近區域100m范圍內拍攝圖像獲取三維數字高程圖。通過分析三維數字高程圖,避開較大的隕石坑,確定最佳著陸地點:在著陸點上方30m處要實現水平方向速度為0m/s。(6)緩速下降階段,區間是距離月面30m到4m,控制著陸器在距離月面4m處的速度為0m/s,即實現在距離月面4m處相對月面靜止,之后關閉發動機,使嫦娥三號自由落體到精確有落月點。嫦娥三號的預定著陸點為19.51W,44.12N,海拔為-2641m,其著陸軌道設計的基本要求:著陸準備軌道為近月點15km,遠月點100km的橢圓形軌道;著陸軌道為從近月點至著陸點,其軟著陸過程共分為上述6個階段,要在盡量減少軟著陸過程的燃料消耗的基礎上,滿足每個階段在關鍵點所處的狀態。
根據以上的基本要求,建立了相對應的數學模型,以便于更好的解決如下問題:
(1)確定著陸準備軌道近月點和遠月點的位置,以及嫦娥三號相應速度的大小與方向。
(2)制訂嫦娥三號登月軌道和各階段的最優控制策略。
(3)針對著陸軌道和自由控制策略進行一系列的誤差和敏感性分析。
2.模型的假設
(1)不考慮太陽、地球對嫦娥三號衛星的N體引力攝動及月球的自轉;
(2)將月球近似看做一個質量均勻的球體;
(3)不考慮嫦娥三號衛星姿態調整時所產生的燃料消耗;
(4)將嫦娥三號衛星近似看做一個質點。
3.符號說明
為了便于描述問題,我們用一些符號來代替文中涉及的一些變量和常量,如表1所示。其他的一些變量將在文中陸續說明。
4.問題的分析
嫦娥三號從距離月面的高度下降到月球表面,在這一過程中,不考慮月球表面太陽風的影響,并且忽略月球的自轉角速度引起的科氏力的影響。由于下降時間較短,所以地球和太陽對嫦娥三號衛星的攝動影響可以排除。嫦娥三號從橢圓形軌道進入著陸準備軌道,要求速度很快下降,從而才不致飛出月球。準備著陸過程中,主減速階段嫦娥三號的運動近似為平拋運動,建立了平拋運動的模型。在快速調整階段,此階段由于飛行豎直距離較短,因此不考慮嫦娥三號消耗的燃料質量的影響,可以認為其滿足機械能守恒定理,故可根據機械能守恒定理建立相關模型。在粗避障階段和粗避障段:建立了有關位移矢量和速度的模型。考慮到在處,嫦娥三號已經基本處于著陸點的上方,因此在此處所假設的速度只存在豎直向下,在水平方面沒有分速度。因為降落減速時間比較短只有垂直于月面的方向運動才能實現,所以在確定著陸點位置和著陸點軌跡時應當考慮燃料最有情況下推力最大,方向自由的方法,即取建立主減速段動力學模型。
5.模型建立
5.1 問題(1)的模型
5.1.1 嫦娥三號著陸準備軌道近月點和遠月點的位置
根據材料分析得,建立以月球赤道平面為xoy平面,月心為坐標原點o,ox為月心與零度經線和零度緯線的交點的連線,oz為月球的極軸。如圖2所示:
5.1.2 嫦娥三號在近月點和遠月點的速度大小和方向
由問題的分析可知,嫦娥三號遠月點進入著陸準備軌道,到達近月點時開始軌道下降。將嫦娥三號在著陸準備軌道上的運動近似看做其在月心引力下圍繞月亮進行的環月運動。因此,嫦娥三號在著陸準備軌道上的運動遵循萬有引力定律,設嫦娥三號在遠月點的速度為,在近月點的速度為,由萬有引力公式
5.2 問題(2)的模型
5.2.1 嫦娥三號在六個階段的最優控制策略模型
本節通過分析嫦娥三號在各階段的參數及約束條件,對嫦娥三號在各階段的發動機控制策略進行了分析,并在各階段單獨建立數學模型,求取最優解來獲得最優控制策略。
5.2.1.1 第一階段:著陸準備階段
嫦娥三號從遠月點到近月點過程中圍繞月球做橢圓軌道運動,滿足開普勒第三定律:
其中,表示橢圓軌道的長半軸長度,表示周期,為常量。在此過程中,嫦娥三號關閉發動機,因此不考慮燃料的消耗,但是對于速度的優化將會影響著陸點的位置。
5.2.1.2 第二階段:主減速階段
距離月面到是主減速階段的區間,在該階段需要實現到距離月面3公里處嫦娥三號的速度降到57m/s。也可看做文獻[2]中的動力下降段。可以達到制動發動機可以抵消近月點較大的初始速度的目的。因此,制動段應以燃料優化為首要目標。[2]
嫦娥三號軟著陸軌跡近似為拋物線軌跡,根據橫向飛行的水平距離小于月球半徑,將整個主減速度分為水平方向和豎直方向運動的過程,所以我們建立模型(5.2.1.1.1)如下:
其中ax,ay分別表示發動機產生的推力的水平加速度和豎直加速度,Tx,Ty分別表示發動機產生的水平推力和豎直推力,s表示嫦娥三號衛星在主減速階段的水平位移,t表示在此階段飛行的時間。
然后我們在主減速段,以燃料優化為主要目標建立優化模型,設從t1到t2時刻,嫦娥三號發動機持續工作,那么嫦娥三號的燃料消耗通過齊奧爾科夫斯基公式[3]:
5.2.1.3 第三階段:快速調整段
快速調整階段,主要是將探測器的姿態進行適當調整,從距離月面3km—2.4km處水平速度將逐漸減至為0。主減速發動機的推力豎直向下之后便進入了粗避障階段。此階段由于飛行豎直距離較短,因此不考慮嫦娥三號消耗的燃料質量的影響,可以認為其滿足機械能守恒定理,故可根據機械能守恒定理建立以下模型(5.2.1.2.1):
5.2.1.4 第四階段:粗避障段
粗避障段,嫦娥三號在距離月面2.4km處對正下方月面2300m×2300m的范圍進行拍照,獲得數字高程如圖3所示,并嫦娥三號在月面的垂直投影位于預定著陸區域的中心位置。
利用數學軟件MATLAB7.8.0進行數據導出及等高線圖繪制,是確定嫦娥三號著陸位置確定及軌道設計的基礎。
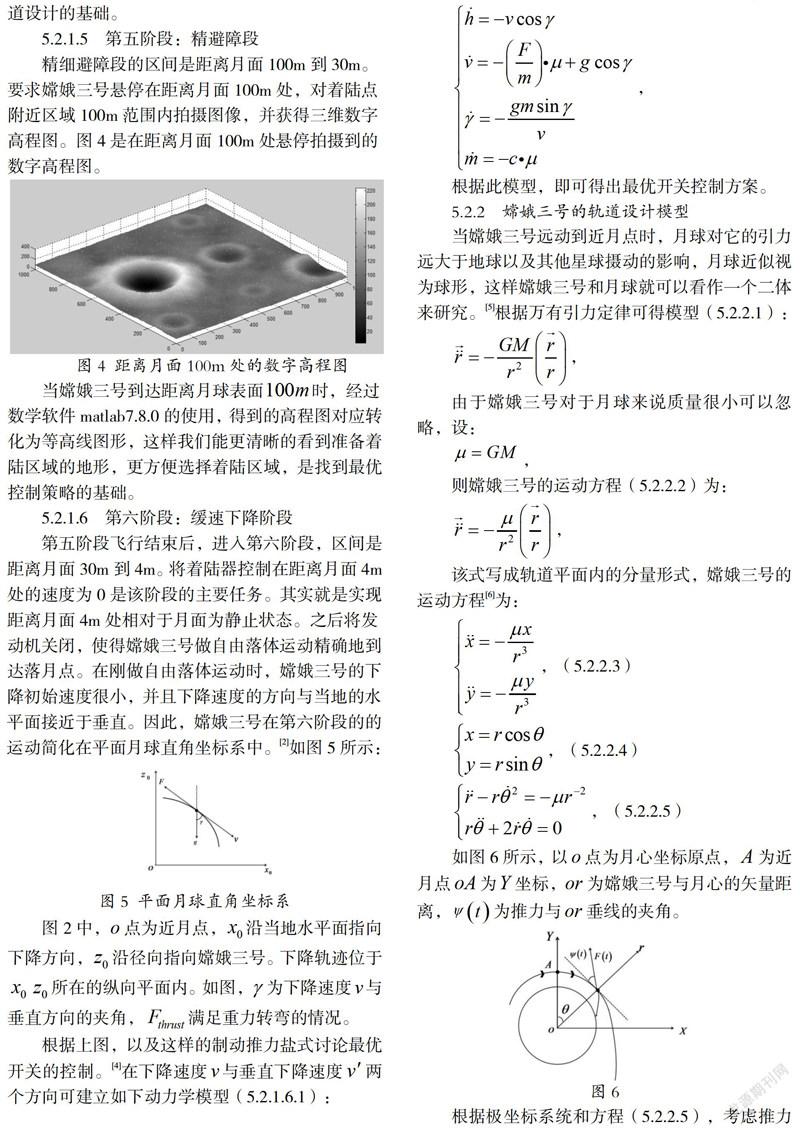
5.2.1.5 第五階段:精避障段
精細避障段的區間是距離月面100m到30m。要求嫦娥三號懸停在距離月面100m處,對著陸點附近區域100m范圍內拍攝圖像,并獲得三維數字高程圖。圖4是在距離月面100m處懸停拍攝到的數字高程圖。
當嫦娥三號到達距離月球表面時,經過數學軟件matlab7.8.0的使用,得到的高程圖對應轉化為等高線圖形,這樣我們能更清晰的看到準備著陸區域的地形,更方便選擇著陸區域,是找到最優控制策略的基礎。
5.2.1.6 第六階段:緩速下降階段
第五階段飛行結束后,進入第六階段,區間是距離月面30m到4m。將著陸器控制在距離月面4m處的速度為0是該階段的主要任務。其實就是實現距離月面4m處相對于月面為靜止狀態。之后將發動機關閉,使得嫦娥三號做自由落體運動精確地到達落月點。在剛做自由落體運動時,嫦娥三號的下降初始速度很小,并且下降速度的方向與當地的水平面接近于垂直。因此,嫦娥三號在第六階段的的運動簡化在平面月球直角坐標系中。[2]如圖5所示:
圖2中,點為近月點,沿當地水平面指向下降方向,沿徑向指向嫦娥三號。下降軌跡位于所在的縱向平面內。如圖,為下降速度與垂直方向的夾角,滿足重力轉彎的情況。
根據上圖,以及這樣的制動推力鹽式討論最優開關的控制。[4]在下降速度與垂直下降速度兩個方向可建立如下動力學模型(5.2.1.6.1):
5.2.2 嫦娥三號的軌道設計模型
當嫦娥三號遠動到近月點時,月球對它的引力遠大于地球以及其他星球攝動的影響,月球近似視為球形,這樣嫦娥三號和月球就可以看作一個二體來研究。[5]根據萬有引力定律可得模型(5.2.2.1):
6.模型求解
6.1 問題(1)模型求解
6.1.1 嫦娥三號著陸準備軌道近月點和遠月點的位置求解
經MATLAB7.8.0編程求解得:經度為21.9W,維度為30.4N,離月球表面的高度為13900m。
6.1.2 嫦娥在近月點和遠月點的速度大小和方向求解
根據萬有引力公式及嫦娥三號在遠月點和近月點的萬有引力恒等式(5.1.2.1)和(5.1.2.2),將已知數據及參數代入上式中,即可推導并求解得到:
由此求解得到嫦娥三號在近月點和遠月點的速度大小,并且兩速度的方向都沿切線方向。
6.2 問題(2)的模型求解
6.2.1 嫦娥三號在六個階段的最優控制策略模型求解
本節的模型本文為分階段建模,所以在求解時利用直接推導數學軟件Mathematica及Matlab分步求解相應模型。由此得到相應參數及最優控制策略的方案。
6.2.1.1 模型(5.2.1.1.1)的求解
6.2.1.3 粗避障段模型求解
利用數學軟件MATLAB7.8.0對圖3進行編程計算得到圖7,然后在文件菜單的import data,導出數據后,再選擇所有數據,在菜單工具欄中,選擇“plot selection”,畫出等高線圖8。
通過高程圖,用MATLAB7.8.0可以畫出如上的水平面上的等高線圖像,可以知道等高線越密集處,地形越陡峭。相反,如果等高線越稀疏,則坡度越舒緩。圖中由不同的顏色表示,顏色不同表示了不同的坡度情況,顏色稀疏的地方容易形成低洼,或盆地,不適合嫦娥三號的著陸,而顏色較密集的地方,說明坡度較陡,嫦娥三號著陸點應該避開這些區域,在顏色集中,分布均勻的地方,說明它們在同一個高度,為了著陸的安全考慮,這些位置更適合嫦娥三號的安全著陸。
6.2.1.4 精避障段模型求解
如6.2.1.3小節,利用數學軟件MATLAB7.8.0對圖4進行編程計算得到圖9,然后在文件菜單的import data,導出數據后,再選擇所有數據,在菜單工具欄中,選擇“plot selection”,畫出等高線圖10。
當嫦娥三號到達距離月球表面時,經過MATLAB7.8.0的編程,得到的高程圖對應轉化為等高線圖形,這樣我們能看到更清晰的準備著陸區域的地形,同樣地,應避免不同顏色交織的地方,因為這些地方地形較為陡峭,不適合著陸,顏色相同多的地方為較好的著陸點,可以看出圖中的白色和淺綠為較好的著陸點。
7.模型的檢驗與結果分析
在研究軟著陸點的動力下降全程,實現神經元制導控制,我們用一種改進的BP算法去訓練神經網路,構成一個閉環的軟著陸控制系統,使著陸器按照一條優化的軌跡實現軟著陸。[7]通過仿真結構分析,和探測器軟著陸的初始參數進行對比,來檢驗結果的正確性,對軟著陸過程可能出現的某些干擾因素進行預防。因此,軟著陸對實際安全著陸有很高的應用價值。
參考文獻:
[1]王鵬基,張熇,曲廣吉,月球軟著陸飛行動力學和制導控制建模與仿真,中國科學E集:技術科學[J] 39(3 ): 521-527,2009.
[2]王鵬基,張熇,曲廣吉,月球軟著陸下降軌跡與制導律優化設計研究,宇航學報28(5):1175-1179,2007.
[3]J Y R Liew et al. Improved nonlinear plastic hingeanalysis of space frame structures[J]. EngineeringStructures, 22: 1324-1338,2000.
[4]姜啟源,謝金星,葉俊,數學模型,北京:高等教育出版社,2011.
[5]韓中庚,數學建模競賽:獲獎論文精選與點評,北京:科學出版社,2007.
[6]李冬雪,月球探測器軟著陸有限推力控制軌道優化設計,V448.233,2007.
[7]王大軼,馬興瑞,李鐵壽,嚴輝,月球軟著陸的神經元最有制導控制方法,系統工程與電子技術991211,121(12):31-36,1999.