基于ARM的微型化智能伺服驅動器設計
2018-09-11 02:09:24王廣龍喬中濤高鳳岐
傳感器與微系統 2018年9期
林 森, 王廣龍, 喬中濤, 高鳳岐
(陸軍工程大學 納米技術與微系統實驗室,河北 石家莊 050003)
0 引 言
目前國內外在控制驅動系統的研究中投入了大量的人力和物力。具有代表性的包括研旭[1]、居逸[2]、艾思控[3]、Elmo[4]等公司,其代表產品旨在實現控制驅動器的微型化和智能化,但無法較好滿足大功率伺服驅動器的需求。因此,需要研制一種大功率智能伺服驅動器以滿足目前人形機器人關節、智能車驅動、云臺等的精確運動控制。
本文設計的智能伺服驅動器采用ARM微處理器為核心[5,6],以大功率集成驅動器件實現對無刷直流電機(brushless direct current motor,BLDCM)的控制和驅動,以控制器局域網(controller area network,CAN)總線完成指令和參數的傳輸[7~9],速度環采用自適應模糊比例—積分—微分(proportion-integration-differentiation,PID)控制算法實現對BLDCM的轉速調節[10],該驅動器具有功率大、精度高、體積小、接口方便等特點,可實現BLDCM高精度和快速響應的要求,可通過添加無線局域網(wireless fidelity,WiFi)模塊、紅外模塊等實現更多的控制功能,可廣泛應用于航天、數控、醫療器械等領域[11]。實驗結果表明:該控制器對BLDCM具有良好的控制效果,具有較高的推廣價值。
1 智能伺服驅動器設計
智能伺服驅動器由ARM控制模塊和驅動模塊組成,如圖1所示。其中ARM控制模塊包括ARM微處理器,CAN,通用串行總線(universal serial bus,USB),串口電路等,驅動模塊包括電源轉換、三相集成驅動器、相電流檢測電路等。BLDCM通過驅動模塊輸出的三相電壓工作。驅動模塊具有欠壓、超溫、過載、短路保護特性和可編程的限流保護功能[9]。

圖1 智能伺服驅動器硬件結構
驅動器工作時,ARM控制模塊通過CAN總線接收控制指令,由驅動模塊實現對BLDCM的控制。其中驅動模塊的器件采用三相脈寬調制(pulse width modulation,PWM)電機驅動芯片DRV8332,可代替傳統的6個MOSFET驅動器實現三相控制,驅動電壓可達50V,連續相電流達8 A,最大13 A。通過ARM控制模塊輸出的3路PWM信號實現BLDCM轉動角度和速度的精確控制。
霍爾傳感器輸出的3路轉子位置信號反饋給ARM控制模塊實現電機換相,磁傳感器輸出的電機角度信號反饋到ARM控制模塊,經過解算得到電機當前角度和轉速,磁傳感器的分辨率可達0.087 9°,滿足無刷直流電機角度精確控制的要求。霍爾電流傳感器采樣到相線電流并將其轉換為電壓值后送入ARM控制模塊A/D端口,解算后進行過流判斷,起到過流保護的作用。
2 模糊PID控制器設計
采用自適應模糊PID控制器的速度環實現對轉速的精確控制,通過設定比例因子和量化因子,建立二維模糊PID控制器,其結構如圖2所示。模糊控制器的輸入語言變量為給定轉速ne和BLDCM實際轉速ns的誤差e與誤差的變化率ec。實際輸出變量為PID的3個參數Kp,Ki,Kd的校正量ΔKp,ΔKi,ΔKd。
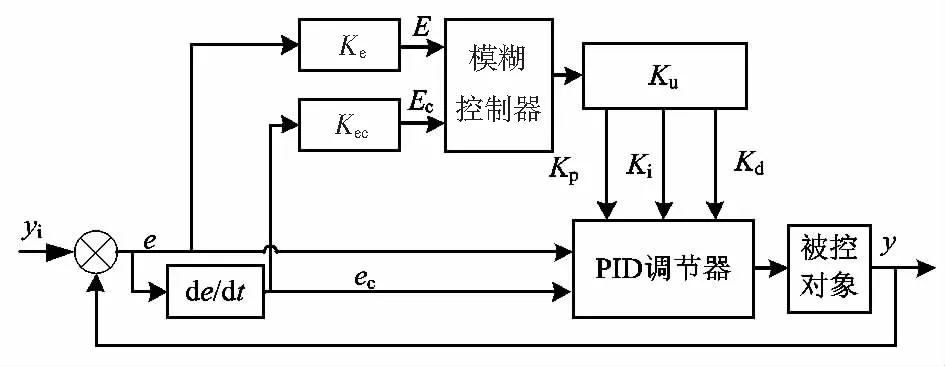
圖2 模糊PID控制器結構
在模糊控制中,將得到的各個數據進行模糊化,才能接受模糊規則的處理。本系統中將輸入e,ec和輸出ΔKp,ΔKi,ΔKd的論域設為[-6,6],并使其離散化,分為7級,分別為{NB,NM,NS,ZO,PS,PM,PB},建立隸屬度函數為“三角形”。根據不同PID參數調整模糊原則,得到輸出變量ΔKp,ΔKi,ΔKd規則表,如表1所示。

表1 輸出變量模糊規則表
得到輸入量隸屬函數、輸出變量的隸屬函數與3個輸出量的控制曲面。
采用“重心法”對模糊推理得到的模糊集合去模糊化,其數學表達式為
(1)
式中uc(z)為變量z的隸屬函數。通過式(1)可得出模糊控制器的兩個輸入量的精確值{E,Ec},并代入式(2)計算
(2)

本文智能伺服驅動器速度環采用自適應模糊PID控制算法實現對轉速調節的快速響應和穩態精度,滿足了無刷直流電機轉速精度、響應速度和動靜態穩定性的要求。
3 智能伺服驅動器軟件設計
驅動器的軟件采用Keil開發環境,編程語言為C語言。驅動器軟件分為主程序模塊和系統功能模塊。主程序模塊包括系統時鐘配置、中斷配置、HALL模塊、PWM模塊、模數轉換器(analog digital converter,ADC)模塊、系統定時模塊、CAN總線模塊、USART模塊、USB模塊等初始化。系統功能模塊則包括各中斷服務功能子程序。如圖3(a)所示,系統初始化完成后,首先確定系統功能模式,然后定時通過CAN總線發送當前狀態信息給上位機,進入中斷等待。
驅動器的功能大部分依賴于中斷程序的運行,對于中斷程序的配置和其優先級的設置是程序設計的關鍵,其中轉速位置調節中斷次優先級應設為最高,其函數流程如圖3(b)所示,CAN接收中斷的優先級應設為最高,其函數流程如圖3(c)所示。
CAN總線對于系統時鐘的配置和波特率的設置要求最為嚴格,波特率相同系統間才可以正常通信,因此控制系統需要相同的高速外部時鐘HSE作為時鐘源。如果HSE不工作,STM32時鐘源會自動轉為內部時鐘造成時鐘紊亂進而造成CAN通信失敗。
換向程序設計的準確性關系到BLDCM能否正常穩定的運轉,在執行換相程序時,通過獲取霍爾傳感器發送的霍爾信號得到當前位置信息,并將接口定時器的輸入捕獲通道設置為上升沿觸發,根據獲得的當前位置,改變TIM1高級定時器的配置,從而改變3路PWM輸出,同時需要調整3路RESET信號的高低電平,完成換相功能。

圖3 驅動器軟件流程
4 實驗驗證及數據分析
通過完成BLDCM控制驅動系統的搭建,上位機通過CAN總線實現對BLDCM的實時控制,CAN總線上的信號波形如圖4所示。

圖4 CAN總線通信波形
上位機通過CAN總線更改電機的設定轉速實現電機調速,也可以設置轉動角度,實現電機角度調節。智能控制驅動器輸出的電機相電壓波形如圖5所示。圖中上方波形為A相,下方波形為B相,兩相間相差120°電角度,智能控制驅動器通過輸出3個兩兩相差120°電角度的梯形波形,實現對BLDCM的控制。實驗采用的電機,其額定電壓24 V,額定功率60 W,額定轉速為3 000 r/min。PID的初始值設為Kp=9,Ki=18,Kd=0.05,設定轉速為1 000 r/min,當運行3 s時,將設定轉速調至1 500 r/min。通過MATLAB軟件建立自適應模糊PID算法仿真模型,電機傳遞函數為1/(0.003 9s2+1.683s+0.049),得到一組仿真數據,通過完成控制器的搭建與實驗,得到一組實際實驗數據,兩組數據結果如圖6所示。

圖5 BLDCM相電壓波形

圖6 電機轉速仿真和實驗響應曲線比較
從電機轉速的響應曲線可以看出,仿真曲線與實驗所獲得的曲線大致相同,當設定轉速為1 000 r/min時,伺服驅動器的調節時間大約為0.4 s,超調量為1.2 %,當設定轉速調至1 500 r/min時,伺服驅動器的調節時間大約為0.19 s,無超調量。分析可以看出,系統穩定時實際速度基本穩定在設定值附近,穩態精度在0.3 %之間。
實際實驗中為了獲得空載和帶載時電機轉速響應數據,通過連接器將一個帶有減速器的直流電機與控制系統的BLDCM相連,BLDCM帶動直流電機旋轉,直流電機作為發電機給3 Ω電阻器供電。當BLDCM輸入為24 V時,空載時母線電流為0.07 A,帶載時母線電流為0.18 A,直流電機產生23.5 V電壓。空載和帶載狀態下設定轉速為1 000 r/min時轉速響應比較如圖7所示,可以看出,相比于空載狀態,BLDCM在帶載的狀態下超調量增大,調整時間延長,穩定精度大致相同。

圖7 電機空載和帶載時轉速響應曲線比較


表2 系統角度設定值對應的輸出數據 (°)
5 結 論
本文設計了一種新型的微型化、大功率智能伺服驅動器,實驗表明:該智能伺服驅動器響應速度快,調節時間短,超調量小,轉動角度精度高,獲得了較好的啟動性能和運行性能,滿足BLDCM控制驅動系統對于穩定性和精確度的要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
