復雜背景下的快速機動目標跟蹤算法*
2018-04-27 01:43:23謝澤奇張會敏張佳佳張云龍張善文
傳感器與微系統 2018年5期
關鍵詞:區域
謝澤奇, 張會敏, 張佳佳, 張云龍, 張善文
(1.鄭州大學 西亞斯國際學院,河南 鄭州 451150; 2.中國科學院 軟件研究所 并行軟件與計算科學實驗室,北京 100190)
0 引 言
在全景視頻序列中對運動目標進行快速有效的跟蹤是計算機視覺領域極具挑戰性的課題[1]。近年來,運動目標檢測與跟蹤的方法主要2種[2]:粒子濾波(particle filtering,PF)算法[3~5]和均值漂移(mean-shift,MS)算法[6,7]。傳統的MS算法采用核函數直方圖建模,核函數起著非常重要的作用,不但決定了參與MS迭代的樣本數量和跟蹤窗口大小,而且為特征引入了位置信息[8,9]。核函數加權也存在一定的局限性,如不適合跟蹤縱橫尺度差別較大的目標及增加迭代時的復雜度等。針對這一問題,近來出現一些采用非核函數的非參量估計方法,如文獻[10,11]。
本文在傳統MS算法的基礎上,提出了一種基于全景圖像的快速機動目標跟蹤算法。主要特點是提取顏色直方圖信息作為機動目標的基本特征。實驗結果表明:算法跟蹤目標的實時性好,具有持久跟蹤的魯棒性。
1 基于顏色直方圖投影的快速機動目標跟蹤
本文提出的快速機動目標跟蹤算法的基本策略為:根據拍攝的視頻幀序列,來依次確定每幀圖像目標顏色直方圖;利用Kalman濾波來預測目標搜索區域,再將后續每幀圖像搜索區域內的場景依次轉換為局部投影圖,并把局部投影圖中的每一個像素值作為密度;利用MS算法依次找到密度分布的最大值。算法的實現步驟描述如下:
1)全景視頻幀序列圖像預處理。利用色彩平衡算法對每幀圖像色差進行處理,通過高斯濾波去除視頻序列中的隨機噪聲,實現色彩平衡和高斯濾波。
2)利用幀間差分算法結合數學形態學提取算法描述如下:
a.從全景視頻序列中依次選取2幀圖像,定義為上一幀圖像It-1(x,y)和當前幀圖像It(x,y);
b.對當前幀圖像與上一幀圖像進行幀間差分運算,得到2幀序列的像素差值Dt(x,y)
Dt(x,y)=|It(x,y)-It-1(x,y)|
(1)
c.將差值Dt(x,y)與預定義的閾值Y進行比較,獲取包含機動目標的二值化圖像
(2)
d.利用數學形態學對提取的二值化圖像進行先腐蝕后膨脹的開運算處理。
3)在初始幀中計算感興趣目標對應的H分量直方圖,依此確定目標框的大小和中心。利用目標顏色直方圖模型建立直方圖投影,將后續每幀視頻序列的圖像像素值計算直方圖分布下的概率值,從而可得到目標出現概率的灰度圖,即為反向概率投影圖。該方法效果較好,而且計算量小、穩定性強[12]。其過程如下:
a.轉換色彩空間模型。在HSV格式下分色處理不易受亮度的影響,因此,需將每幀序列圖像從RGB色彩空間模型轉換成HSV色彩空間模型;
b.計算H分量直方圖。H分量直方圖計算方法為:若采用m級直方圖,其特征空間中特征值的個數為m,每個特征值對應的顏色特征為u,u=1,2,…,m,則m級直方圖用qm表示。
令b:R2→{1…m},設xi為視頻序列中單幀圖像的像素點,b(xi)為該像素xi在計算的量化特征空間的排列序號,即直方圖索引;δ(x)為Delta函數,利用δ[b(xi)-u]判斷像素xi的顏色值是否等于第u個特征值,若等于,則其值為1;否則,其值為0。對每個像素點進行計算后可得出每個特征值頻數為
(3)
c.直方圖均衡。本文算法采用線性變換將每幀圖像直方圖像素范圍從[0,qmax]歸一化到[0,255],線性變換后得到的每個特征值為
(4)
d.計算直方圖投影值[13]。每幀圖像中單個像素xi對應的直方圖投影值用bp(xi)表示,則將輸入的每幀圖像xi依次計算H分量直方圖分布下的概率值,該值反映目標出現的概率,即反向概率投影圖,其計算公式為
(5)
4)在每幀圖像中,從Kalman預測目標中心位置開始逐步搜索點Ci,并以此為中心確定一個大于或等于目標框的候選目標搜索區域,然后計算該區域圖像的投影圖,從而確定目標的真實位置:
a.計算候選區域中心。由在當前候選區域的中心點Ci開始計算下一個中心點Ci+1,其計算公式為
(6)
(7)
式中x,y∈Ai為當前目標候選區域內各個像素的位置;bp(x,y)為該區域內各個像素對應的投影值;(Cxi+1,Cyi+1)為質點坐標。
b.迭代停止。若‖Ci+1-Ci‖<ε,則迭代停止;否則,令Ci=Ci+1,返回步驟(a)。
5)利用Kalman結合測量值Ci+1修正當前狀態的估計值,利用Kalman預測目標位置減少迭代次數,并設置搜索范圍避免全局投影。本文算法采用等速運動模型預測目標對象的中心位置。其計算步驟為:
a.設置初始值。對下列向量進行初始化,即初始化狀態噪聲方差矩陣Qk-1、初始誤差方差矩陣Pk-1、測量噪聲方差矩陣Rk-1和初始狀態向量X0;
b.預測目標中心位置。預測狀態向量估計值Xk,并將該Xk作為MS算法在當前幀的初始搜索點;

2 實驗與結果分析
在Intel(R)Core(TM)i3的CPU、2GB內存、Windows 7旗艦版計算機上,采用VS2008和OpenCV2.1開發環境完成實驗。實驗序列為一段黃昏時分別拍攝在簡單背景和復雜背景下直升飛機飛行的24位全景真彩視頻圖像,總長685幀,每幀分辨率為720×576。實驗對算法2個性能進行指標評價[14]:1)目標檢測與跟蹤的準確性和抗干擾能力分析;2)目標檢測與跟蹤的實時性分析。
2.1 準確性和抗干擾能力分析
采用幀差法進行機動目標檢測及二值化效果如圖1所示。可以看出,該方法能夠較完整準確地檢測機動目標。
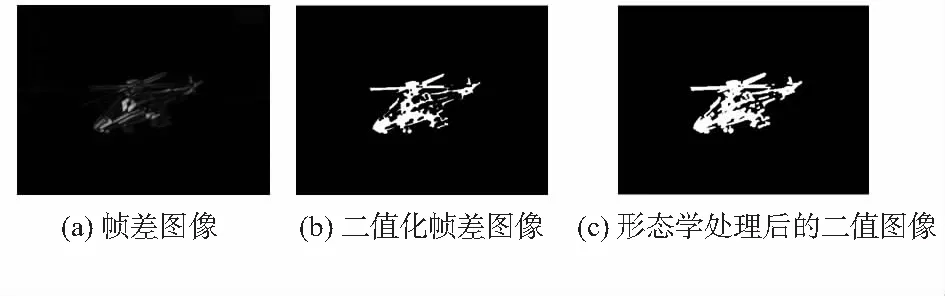
圖1 幀差圖及二值化效果
快速機動目標檢測與跟蹤實驗結果如圖2所示。其中最大概率的像素點(圖2(a)矩形區域)在圖2(c)所示概率投影圖中用高亮度顯示。從圖2結果可以看出:本文算法利用候選區域中每個像素值來表示候選區域與目標模型的相似度,若某個候選區域中的像素值之和最大,則該候選區域即為當前幀中的目標位置。
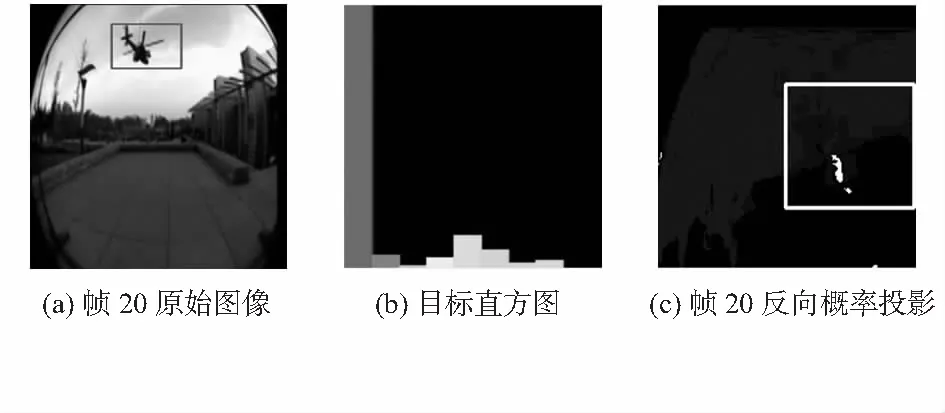
圖2 直方圖投影示意
圖3為全景圖像的目標周圍區域投影。其中,圖3(a)為選擇感興趣的目標(矩形框中的飛機圖像);圖3(b)根據目標的運動規律在目標鄰近區域設置投影區域的范圍。從圖3可以看出:本文提出的投影方案不但可以避免不必要的全圖投影,減小計算量和迭代次數,而且抑制了目標周圍與目標顏色相似的背景干擾。

圖3 原始圖和目標周圍區域投影
圖4為本文提出的算法的跟蹤實驗結果。其中,圖4(a)為光線不足時全景視頻的跟蹤結果,可知,在光線不足情況下,本文提出的算法仍能夠正確跟蹤目標;圖4(b)為光線不足時對復雜背景下全景視頻的跟蹤結果,在光線不足且背景復雜情況下,依舊能準確跟蹤目標,具有較好的抗干擾性,在機動目標進行旋轉、翻滾等各種復雜情況下,跟蹤效果依然很好,具有較好的魯棒性。
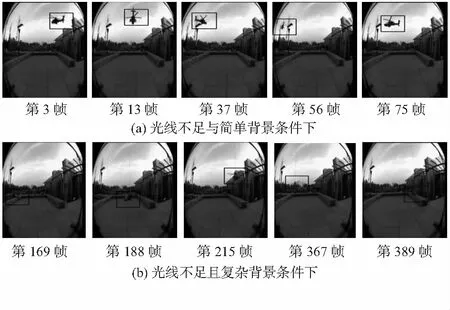
圖4 本文算法不同條件下跟蹤結果
2.2 實時性分析
為了驗證快速機動目標檢測與跟蹤的實時性,采用視頻序列同上,與傳統MS算法、文獻[11]算法進行比較。表1給出了3種算法的機動目標檢測與跟蹤時平均每幀的搜索時間。由表1可以看出:本文算法的搜索時間短,有效提高了目標的跟蹤速度。
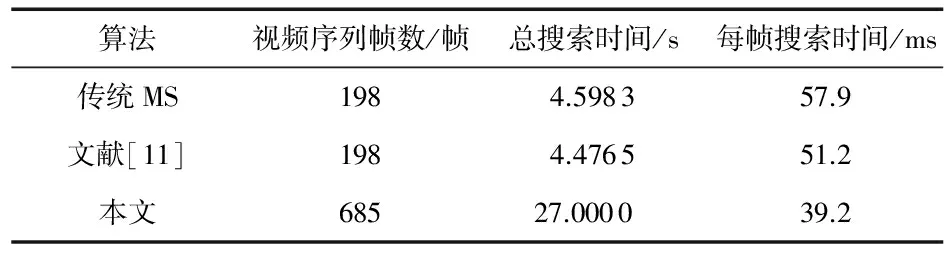
表1 3種算法實時性實驗結果
3 結 論
主要結合Kalman濾波算法和MS算法實現了機動目標實時跟蹤。實驗結果表明:算法能夠對機動目標在下一幀中的速度、位置等參數實現準確估計,提高了跟蹤精度,具有較好地魯棒性,而且跟蹤時間短,能適應目標和背景的復雜變化,具有較好的應用前景。
參考文獻:
[1] 徐 毓,金以慧,楊瑞娟.基于強跟蹤濾波器的多目標跟蹤方法[J].傳感器與微系統,2002,21(3):17-20.
[2] 李 志,謝 強.一種基于改進粒子濾波的運動目標跟蹤[J].計算機科學,2014,41(2):232-235,252.
[3] 謝天旭,何炳蔚.基于顏色特征與SIFT 特征自適應融合的粒子濾波跟蹤算法[J].計算機應用研究,2013,30(11):3506-3509.
[4] 陳家波,趙勛杰,許 崢.基于梯度方向直方圖特征和粒子濾波算法融合的目標跟蹤[J].小型微型計算機系統,2012,33(8):1821-1824.
[5] 梁 楠,郭 雷,王 瀛.基于粒子濾波和自適應模型的目標跟蹤算法[J].哈爾濱工業大學學報,2012,44(10):139-143.
[6] 崔誦祺,安建平,王愛華.機動目標模型匹配卡爾曼濾波載波跟蹤算法[J].系統工程與電子技術,2014,36(2):376-381.
[7] 戴邵武,方 君,張文廣,等.高超聲速強機動目標改進IMM-CKF跟蹤算法[J].傳感器與微系統,2016,35(9):133-136,140.
[8] 趙紅雨,吳樂華,史燕軍,等.基于HSV顏色空間的運動目標檢測方法[J].現代電子技術,2013,36(12):45-48.
[9] 席慶彪,董陽霞,劉慧霞.一種基于M-APF的實時UAV目標跟蹤算法[J].系統仿真學報,2014,26(1):107-111,118.
[10] 胡 威.一種新的Mean Shift快速機動目標魯棒跟蹤方法[J].計算機應用與軟件,2014,31(1):140-143.
[11] 伊力哈木·亞爾買買提.基于改進Mean Shift視頻目標跟蹤算法的研究[J].計算機測量與控制,2014,22(2):471-472,488.
[12] 徐 琨,賀昱曜,王衛亞.基于CamShift的自適應顏色空間目標跟蹤算法[J].計算機應用,2009,29(3):757-760.
[13] 胡 波,陳 懇,徐建瑜,等.基于Kalman預測和Mean Shift算法的視頻目標跟蹤[J].光電子·激光,2009,20(11):1517-1522.
[14] 黃馨譽,胡士強,鄭世友.基于PN學習的雷達目標魯棒跟蹤算法[J].傳感器與微系統,2016,35(12):116-119.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15