基于多尺度特征和嵌套級聯Adaboost的車輛檢測*
2018-04-27 01:43:00康珮珮于鳳芹
傳感器與微系統 2018年5期
康珮珮, 于鳳芹, 陳 瑩
(江南大學 物聯網工程學院,江蘇 無錫 214122)
0 引 言
傳統的車輛檢測方法,如感應線圈檢測、紅外檢測、雷達檢測等,因成本較高、維護不便等問題已不能適應當前智能交通的發展。基于視頻圖像的車輛檢測方法[1~5]已成為當今的研究熱點。
在基于視頻圖像的車輛檢測方法中,Viola P和Jones M[6]提出的基于特征和級聯Adaboost分類器的檢測框架應用廣泛。在特征方面,文獻[2]提取Haar-like特征表示車輛圖像,Haar-like特征較為簡單但對車輛的描述性較差,導致檢測率較低。為提高準確率,文獻[3]提取了Haar-like和方向梯度直方圖(histogram of oriented gradient,HOG)兩種特征描述車輛,取得了較好的檢測效果。文獻[4]提取了多尺度局部二值模式(local binary pattern,LBP)特征,與單一尺度LBP特征相比包含更多的有用信息,檢測率有所提高。綜上,多尺度特征包含更多有用信息,多種特征對圖像的描述性更好。在分類器方面,文獻[2,3]構建了Discrete Adaboost分類器進行車輛檢測,但Discrete Adaboost分類器對非典型的正樣本權值調整過高導致分類器效率下降。文獻[4]使用的Gentle Adaboost分類器則通過修改錯誤樣本權重調整的方法來提高分類器效率,使得訓練和檢測效率均高于Discrete Adaboost。為了進一步提高檢測率和檢測速度,文獻[2~4]使用了級聯形式Adaboost分類器。文獻[7]的嵌套級聯形式Adaboost分類器因相鄰層間有關聯使得分類器效率更高。
為快速且準確地進行車輛檢測,本文提出了一種基于多尺度特征和嵌套級聯Gentle Adaboost分類器的車輛檢測算法。首先為了快速得到描述性更好的特征,分別使用積分直方圖和積分圖像加速提取多尺度HOG和多尺度多塊局部二進制(multi-block LBP,MB-LBP)特征;然后分別使用生成分類器和多分支樹構建基于兩種特征的兩種弱分類器,并組合成Gentle Adaboost分類器;最后對Gentle Adaboost分類器采用嵌套級聯結構,在級聯的前幾層使用基于HOG特征的弱分類器排除大部分背景區域,后幾層使用基于MB-LBP特征的弱分類器排除與車輛相似區域。仿真結果表明:該算法的檢測速度,檢測精度和召回率均優于其他車輛檢測算法。
1 多尺度特征提取及其加速
圖像中的有用信息往往分布在不同尺度,單一尺度下提取的特征包含的有用信息相對較少,因此本文在多個尺度下提取HOG特征和MB-LBP特征,使提取的特征更好地描述圖像。但是多尺度的引入增加了計算復雜度,本文分別使用積分直方圖和積分圖像對兩種特征的提取過程進行加速。
1.1 多尺度HOG特征提取及其加速
HOG是一種圖像特征描述算子[8],用描述目標的輪廓信息。本文在4個尺度下提取梯度方向直方圖。用不同尺寸的窗口遍歷圖像,將圖像分割為若干個有重疊的不同尺寸圖像塊(block),block的尺寸有4種:2×2,4×4,8×8,16×16;統計每個block的梯度方向直方圖,每個直方圖 可定義為hi(xi,yi,si),其中(xi,yi)為直方圖i的空間位置,si為尺度,取值集合為{2,4,8,16},si=2時,block的尺寸即為2×2;將不同尺寸下block的梯度方向直方圖組合在一起,即得到了多尺度HOG特征。
為了提高多尺度HOG特征的提取速度,本文首先計算積分直方圖[9],并將其作為輸入圖像的中間表示,然后使用積分直方圖快速計算每個block的HOG特征。灰度圖像的積分直方圖定義為
H(x,y,b)=H(x-1,y,b)+H(x,y-1,b)-
H(x-1,y-1,b)+Q(f(x,y))
(1)

(2)
式中b=1,2,…,9,為梯度方向二進制(bin)的值;(x,y)為灰度圖像中像素點坐標;Q(x,y)為像素點(x,y)所對應的梯度方向,若梯度方向為b,則Q(f(x,y))的值等于像素點的梯度幅值;否則,等于0。獲得積分直方圖后,利用式(3)得到block區域T(x-,y-,x+,y+)的梯度方向直方圖
h(T,b)=H(x+,y+,b)-H(x-,y+,b)-
H(x+,y-,b)+H(x-,y-,b)
(3)
式中 (x-,y-),(x+,y+)分別為T的左上角和右下角像素點的坐標。與傳統直方圖的計算不同,積分直方圖未重復計算每個可能區域的直方圖,大幅提高了計算速度。在計算一個block的梯度方向直方圖時,只需4×9個像素點,進行3×9次加減法運算,時間復雜度為O(1)。
1.2 多尺度MB-LBP特征提取及其加速
MB-LBP[10]使用LBP算子對矩形區域編碼,用于描述目標的紋理信息。MB-LBP通過比較中心子塊的平均強度gc和周圍8個矩形鄰域的平均強度{g1,…,gn}得到,其值定義為
(4)
為了快速計算多尺度MB-LBP特征,本文使用積分圖像計算每個block的MB-LBP特征。積分圖像中的任意一點(x,y)的值等于從圖像的左上角到該點所構成的矩形區域內所有點的灰度值之和,即

(5)
任意子區域R中所有像素點的灰度值之和可通過式(6)得到
ii(R)=I(x+,y+)-I(x-,y+)-I(x+,y-)+
I(x-,y-)
(6)
式中 (x-,y-),(x+,y+)分別為R的左上角和右下角像素點的坐標。通過引入積分圖像,在求block的MB-LBP特征時,只需進行3×9次加減法和9次除法運算,即可得到block中9個子區域的平均像素值,進行比較即可得到MB-LBP特征,大幅提高了計算速度。
2 嵌套級聯Gentle Adaboost分類器
2.1 Gentle Adaboost分類器
Gentle Adaboost是從訓練集中訓練不同的弱分類器,然后集合弱分類器,構成一個更強的最終分類器(強分類器)。為提高Gentle Adaboost算法的性能,本文使用生成分類器和多分支樹定義了2種弱分類器,分別對應2種特征:多尺度HOG特征和多尺度MB-LBP特征。
2.1.1 基于多尺度HOG特征的弱分類器
對于HOG特征空間,本文構建了一個基于車輛模型的生成分類器[3]。使用訓練集中正樣本的均值直方圖作為模型
(7)
式中P為訓練集中正樣本的個數。生成分類器用于計算輸入圖像的直方圖hi與模型mi之間的距離。弱分類器gHOG定義為
(8)
式中α1,α2為[-1,+1]之間的小數,代表分類結果的置信度,理想情況下|α1|=|α2|=1表示分類完全正確,+1表示車輛,-1表示非車輛;d(hi,mi)為直方圖hi與模型mi之間的巴氏距離;θi為對于特征i在巴氏距離上的最優閾值。
2.1.2 基于多尺度MB-LBP特征的弱分類器
由MB-LBP提取過程可知,其特征值只是表示二值字符串的一個符號,即其不具有可度量性。因此,針對MB-LBP特征空間,本文使用多分枝回歸樹設計弱分類器[10]。多分枝樹共有256個分枝,每一個分枝對應一個特定的離散值(即MB-LBP特征值)。第j個MB-LBP特征對應的弱分類器可表示為
(9)
式中k和al為通過學習得到的回歸參數;fkj為MB-LBP特征向量fj的第k個特征值;al,l=0,…,255為分類結果的置信度。每個弱分類器對應一個單一的特征。在檢測階段,對于一個特定的MB-LBP特征,可以通過多分枝樹快速得到相應的回歸值。
2.2 嵌套級聯Gentle Adaboost分類器
嵌套級聯Gentle Adaboost分類器由一些集成(嵌套)層組成,每一層包含一個Gentle Adaboost分類器。嵌套級聯分類器的每一層不僅是級聯分類器的一個獨立結點,同時也是下一層的一個組成部分。假設嵌套級聯分類器為C,包含K層,嵌套級聯分類器可定義為
(10)
(11)

(12)
3 算法實現步驟
基于多尺度特征和嵌套級聯Gentle Adaboost的車輛檢測流程如圖1所示。
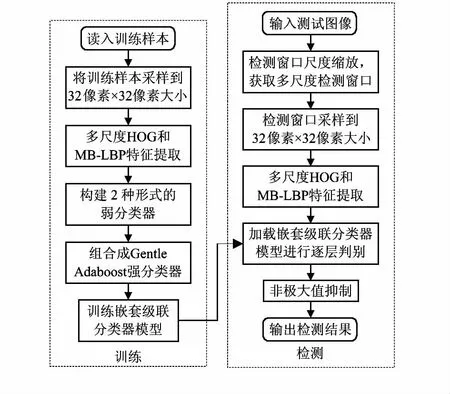
圖1 基于多尺度特征和嵌套級聯Gentle Adaboost的車輛檢測流程
4 仿真實驗結果與分析
實驗環境為Intel Core i5—3470處理器、4 GB內存的硬件環境,以及Windows7,MATLAB R2012a軟件環境。實驗選取BIT車輛數據集[11]和伊利諾伊大學厄巴納—香檳分校(UIUC)車輛數據集[12]分別進行訓練和檢測。BIT數據集包含一些復雜環境下的圖像,如背景的干擾、光照的變化,以及車輛顏色的不同,圖像大小為1 600×1 200,本文首先使用雙三次插值方法將圖像采樣到400×300,然后隨機選取其中的5 000張圖像進行訓練,2 800張圖像(共2 890輛車)進行測試,訓練時的負樣本是收集的5 000張非車輛圖像。UIUC數據集是標準化的車輛數據集,包含1 050張訓練圖像(其中550張是車輛圖像,500張是非車輛圖像)和278張測試圖像(共339輛車),所有的車輛圖像都是經灰度化的車輛側面圖像,具有不同的分辨率,有部分遮擋現象,車輛和背景對比度低,并且背景比較復雜。
本文使用精度P(Precision)、召回率R(Recall-rate)以及每幅圖像的平均檢測時間t作為評價指標。為驗證本文算法的有效性,分別與文獻[2~4]中的算法在BIT和UIUC數據集上進行了對比實驗,實驗結果如表1和表2。
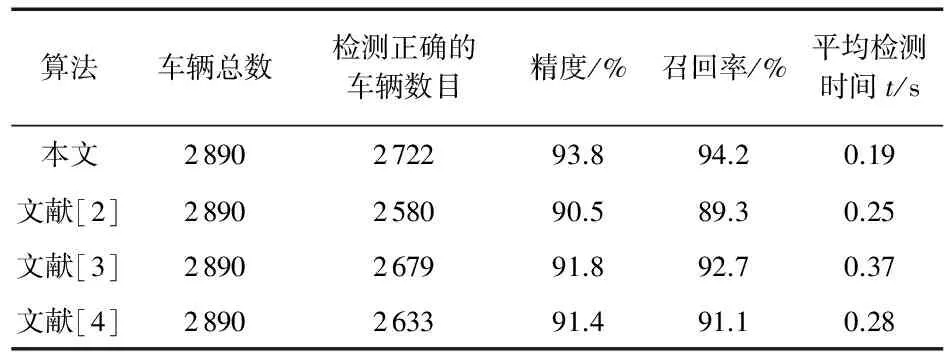
表1 本文算法與其他算法在BIT數據集上的比較
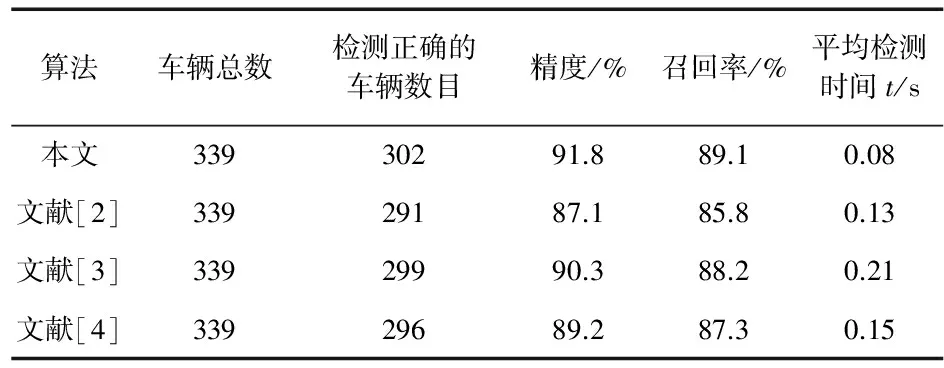
表2 本文算法與其他算法在UIUC數據集上的比較
由表1和表2可以看出,本文算法的檢測精度和召回率均高于其他3種算法,且檢測速度更快。在BIT數據集上,本文算法的檢測精度和召回率分別達到了93.8 %和94.2 %,平均檢測耗時分別占文獻[2~4]中算法的76.0 %,51.4 %,67.9 %。在UIUC數據集上,本文算法的檢測精度和召回率分別為91.8 %和89.1 %,平均檢測耗時分別占文獻[2~4]中算法的61.5 %,38.1 %,53.3 %。基本達到了實時性要求。本文算法在BIT數據集上的效果表現較好,這是由于BIT數據集中的車輛圖像相對清晰,且背景較為單一。而UIUC數據集中的車輛圖像背景比較復雜,因此,檢測精度和召回率相對較低。
圖2為本文算法在BIT數據集和UIUC數據集上的部分檢測結果。由圖2(a)可以看出,本文算法在光照良好和光照較暗的環境下可以有效檢測出車輛,較好地應對了光照變化。由圖2(b)可以看出,本文算法在復雜環境中仍表現出了較好的檢測結果,有效應對了背景干擾。

圖2 本文算法的部分檢測結果
5 結束語
提出了一種基于多尺度特征和嵌套級聯Gentle Adaboost的車輛檢測算法。為了快速得到更多有用信息,提取了多尺度HOG和多尺度MB-LBP兩種特征,并分別使用積分直方圖和積分圖像進行加速。基于2種特征為Gentle Adaboost構建了2種弱分類器,并對Gentle Adaboost采用嵌套級聯結構,進一步提高了檢測率和檢測速度。實驗結果表明:本文算法相較于其他車輛檢測算法,具有較高的檢測精度和召回率,且檢測速度較快,基本滿足實時性要求。
參考文獻:
[1] 繆小冬,李舜酩,沈 峘,等.路面車輛的視覺檢測方法[J].傳感器與微系統,2010,29(2):5-8,12.
[2] Tang Y,Xu Y C,Zhang C Z.Robust vehicle detection based on cascade classifier in traffic surveillance system[J].The Open Automation and Control Systems Journal,2014 (6):349-354.
[3] Negri P,Clady X,Hanif S M,et al.A cascade of boosted generative and discriminative classifiers for vehicle detection[J].EURASIP Journal on Advances in Signal Processing,2008,2008:1-12.
[4] Kovacic K,Ivanjko E,Jelusic N.Measurement of road traffic parameters based on multi-vehicle tracking[C]∥Proceedings of the Croatian Computer Vision Workshop,2015:3-8.
[5] 朱 勇,付彥君.基于多特征融合的車輛檢測算法[J].傳感器與微系統,2009,28(8):110-112.
[6] Viola P,Jones M.Rapid object detection using a boosted cascade of simple features[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR),2001:511-518.
[7] Verschae R.Object detection using nested cascades of boosted classifiers:A learning framework and its extension to the multi-class case[D].Chile:Universidad de Chile,2010:25-29.
[8] Dalal N,Triggs B.Histograms of oriented gradients for human detection[C]∥IEEE Conference on Computer Vision and Pattern Recognition(CVPR),2005:886-893.
[9] Porikli F.Integral histogram:A fast way to extract histograms in Cartesian spaces[C]∥IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2005:829-836.
[10] Zhang L,Chu R,Xiang S,et al.Face detection based on multi-block lbp representation[C]∥Lecture Notes in Computer Science,2007:11-18.
[11] Dong Z,Jia Y D.Vehicle type classification using distributions of structural and appearance-based features[C]∥Proceedings of the 20th IEEE International Conference on Image Processing(ICIP),2013:4321-4324.
[12] Agarwal S,Awan A,Roth D.Learning to detect objects in images via a sparse,part-based representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(11):1475-1490.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54