應用于電子穩像的改進塊匹配算法
2014-08-02 12:47:44邵克勇劉遠紅白麗麗張會珍
化工自動化及儀表 2014年5期
關鍵詞:區域
楊 莉 邵克勇 劉遠紅 白麗麗 張會珍
(東北石油大學電氣信息工程學院,黑龍江 大慶 163318)
電子穩像是一種利用圖像處理手段實現視頻去抖的技術。經典電子穩像過程主要包含3部分:運動估計、運動分離和運動補償。其中,運動估計用來檢測視頻幀之間的全局運動矢量。作為穩像過程的第一步,其計算的準確性和速度對后續處理有重要影響。塊匹配(BMA)是電子穩像中常用的運動估計算法,其基本思想是將參考幀圖像分成一定大小的圖像塊,在當前幀中找到各塊的最佳匹配位置,以一定準則去除錯誤匹配,計算得到幀間全局運動矢量。
準確并快速定位最佳匹配位置是塊匹配搜索算法的研究目的。在已有的搜索算法中,基于平均絕對值誤差(MAD)和平均方差(MSE)的全局搜索算法(FS)被認為是塊匹配中最準確的算法[1]。但其缺點是計算量大,難以實時處理。常用的改進算法多是采用減少搜索點的數量來提高速度。比較典型的有三步法(NTSS)[2]、四步法(4SS)[3]及菱形搜索法(Diamond)[4]等。在此基礎上后繼學者又進行了很多改進,如文獻[5,6]中所提出的算法。這些快速搜索算法的主體思想,都是利用圖像運動矢量的中心偏置特性,即越接近最佳匹配位置,匹配誤差越小。在圖像小偏移的情況下,初始搜索位置大多在中心偏置區域內,所得運動估計具有很好的準確性和快速性。然而,在實際穩像應用中,圖像幀的偏移經常超出最小偏置作用區域,造成初始搜索方向不確定,很容易陷入局部最優,產生錯誤運動估計。為處理偏移較大的情況,可以擴大窗口搜索范圍,采用全局搜索方式找到最小匹配誤差的位置,但計算復雜度會大幅增加。針對這一缺陷,筆者提出了一種檢測大偏移運動的擴展搜索算法,綜合了全局搜索的準確性和中心偏置快速性。
1 準備工作①
1.1 塊的選取
圖像偏移過大時,邊緣區域不能在兩幀中重復出現,因此盡量避免將塊選擇在靠近邊緣區域的位置上,故將每幀圖像的四周預留10%的邊界補償區域。
塊匹配基于塊內各像素點做相同運動的原則。塊選得太大,內部像素運動的不一致性增大,且計算量增加;塊選得太小,匹配特征不顯著,易受噪聲干擾。筆者針對640×360大小的視頻幀,在區域內均勻選擇大小為16×16的塊,并使塊間間距與塊的大小相同。
位于圖像平坦區域或直線邊緣處的塊,所在區域紋理相近,塊的移動不能引起匹配誤差的顯著變化,難以精確定位,應用梯度閾值剔除這類塊。
1.2 降采樣全局搜索算法(DSFS)
在引出中心擴展搜索法之前,先介紹一種降采樣全局搜索算法。采用最小絕對誤差(SAD)作為搜索的匹配準則。
圖1a是全局搜索算法的示意圖,顏色越淺表示匹配誤差越小。計算搜索窗口內每一個點的SAD值,找到最小值(圖中顏色最淺的s)處為最佳匹配位置。圖1b是降采樣全局搜索算法示意圖,在搜索窗口內隔行隔列取點計算SAD值,在最小值處與相鄰的8個點比較,找到最佳匹配點位置。
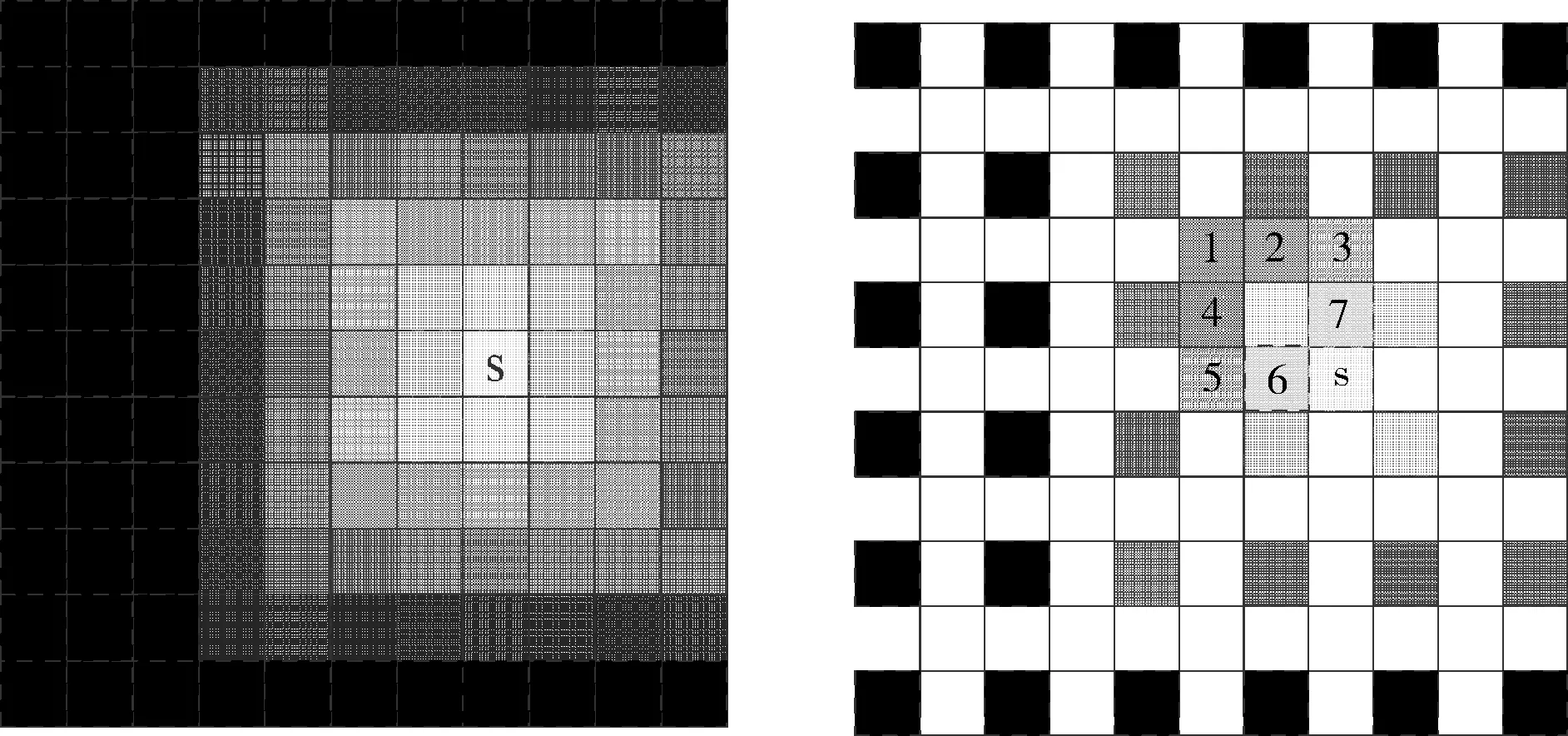
a. 全局搜索算法 b. 降采樣全局搜索算法
與全局搜索算法相比,降采樣全局搜索算法減少了計算點數,由于其間隔只有一個像素,中心偏置特性在最佳匹配位置附近很顯著,其精確度與全局搜索相當。降采樣全局搜索法雖然減少了計算點數,依然無法克服全局搜索的缺陷,即窗口大小固定。對于無偏移的兩幅圖像,仍要遍歷完整個窗口尋找到最小偏差位置。這樣使得每個塊匹配的計算量只與預設搜索窗口大小有關,無論圖像實際偏移如何,計算開銷不變。顯然,這種搜索方式在大多數情況下將進行很多不必要的計算。
2 中心擴展搜索算法(CEXS)
假設進入中心偏置區域內時,梯度向量的方向基本一致,指向最佳匹配中心。基于降采樣全局搜索法(DSFS)原理,以起始點為中心,向外逐層擴展,搜索到進入中心偏置區域內的點,再在中心偏置區域內準確定位最佳匹配位置。具體步驟如下:
a. 以起始點P0為圓心,找到半徑r1的圓環C1上的最小SAD值SAD(P1),P1為最小SAD值所在位置,并記圓心到P1的向量為LV1=P1-P0。
b. 令r2=r1+Δr,得到半徑r2的圓環C2上最小SAD值SAD(P2)和位置P2,并得到向量LV2=P2-P1。
c. 用相同的計算方式得到在半徑為rk=r1+(k-1)Δr的圓周Ck上最小SAD值SAD(Pk)和位置Pk,并得到向量LVk=Pk-Pk-1。

e. 若不滿足步驟d中的條件,則繼續執行步驟c,直到半徑擴大到搜索窗口的邊界為止。

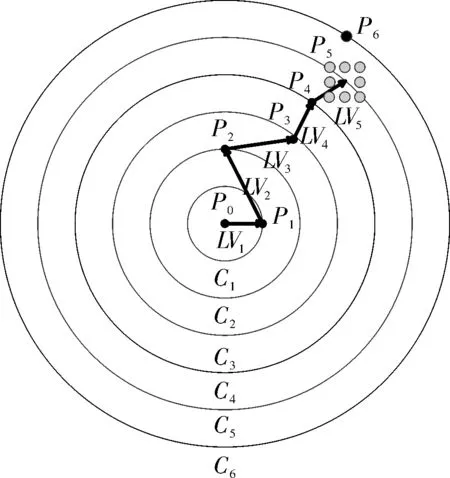
圖2 中心擴展搜索算法原理示意圖
實際中,為了計算方便,用方形環代替圓環,可以得到很好的近似。
3 實驗結果與分析
實驗在Matlab 2012a仿真平臺上進行,處理器主頻為2.1GHz,內存2G,操作系統Windows7。對一段分辨率為640×360大小的抖動視頻,應用筆者所提算法進行穩像。先通過實驗比較算法處理兩幀圖像的效果,再給出處理整段視頻序列的結果。分別就幀間小偏移和大偏移兩種情況,采用全局搜索算法、菱形搜索算法、降采樣全局搜索算法和中心擴展搜索算法獲得幀間(水平、垂直、旋轉)偏移參數,得到校正前后兩幀的峰值信噪比(PSNR),同時記錄每種算法的運行時間。
圖3為實驗小偏移時選用的兩幀圖像,表1列出4種算法處理后的PSNR值和運行時間。

a. 參考幀 b. 當前幀

搜索算法PSNRdB時間消耗s全局搜索法32.687 48.557 7菱形搜索法32.687 40.064 2降采樣全局搜索法32.687 42.196 9中心擴展搜索法32.687 40.795 5
圖4為視頻中大偏移的相鄰兩幀圖像,表2是4種算法處理后的結果對比。
由實驗結果可以看出,幀間小偏移時4種算法的峰值信噪比相同,均能準確得到全局運動向量,其中菱形搜索法耗時最少;大偏移情況下,菱形搜索法的峰值信噪比明顯小于其他3種算法,原因是其計算參數出現錯誤,其他3種算法均可靠,且中心擴展搜索法耗時最少。

a. 參考幀 b. 當前幀
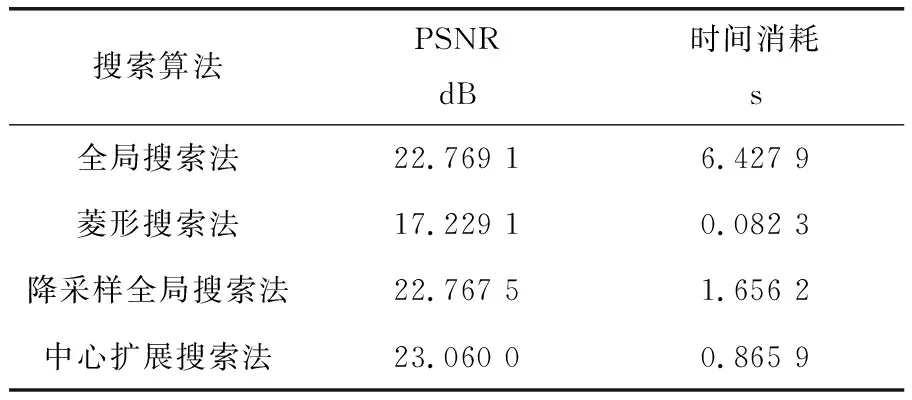
搜索算法PSNRdB時間消耗s全局搜索法22.769 16.427 9菱形搜索法17.229 10.082 3降采樣全局搜索法22.767 51.656 2中心擴展搜索法23.060 00.865 9
圖5a為視頻前100幀相鄰幀間的峰值信噪比對比圖,全局搜索法(FS)、降采樣全局搜索法(DSFS)和中心擴展搜索算法(CEXS)的PSNR值基本相同,菱形搜索法(DS)出現很大波動,在偏移較大的情況先得出錯誤的全局運動矢量。圖5b中顯示了4種算法的時間消耗,其中全局搜索、降采樣全局搜索算法的計算量主要與搜索窗口的大小有關,故其時間消耗對不同圖像幀不發生顯著變化,菱形搜索在較小范圍內會找到最優解,總體計算量小,時間消耗顯示在圖中也很平緩。中心擴展搜索算法波動比較明顯,其計算量隨幀間偏移情況的不同而變化。
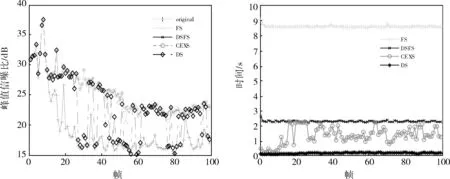
a. PSNR值對比 b. 計算時間對比
4 結束語
針對電子穩像中傳統塊匹配算法的缺陷,提出了一種中心擴展搜索算法,利用半全局搜索結合最小中心偏置特性,避免搜索陷入局部最優,同時降低了計算復雜度,能在一定程度上根據視頻幀的偏移大小調整搜索步數,減少計算量。實驗表明:新算法在具有全局搜索算法準確性的同時還提高了計算速度。然而提出的穩像算法尚需進一步完善,在圖中可以看出,菱形搜索算法能準確定位的地方,新算法的時間消耗比其要高,需要繼續改進。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15