時滯系統的雙自由度Smith模糊PID控制器設計與仿真
2014-08-02 12:51:02孫立強鄭恩讓
化工自動化及儀表 2014年5期
關鍵詞:系統
孫立強 鄭恩讓
(陜西科技大學電氣與信息工程學院,西安 710021)
模糊PID控制器是傳統的PID控制與模糊控制相結合形成的一種智能控制器,它融合了PID控制器不依賴對象數學模型及模糊控制器良好的知識表達能力等優點[1],合理地設置控制器的參數能夠對大時滯過程取得理想的控制效果。
筆者研究的模糊PID控制器改進了文獻[2]中模糊PID的控制結構,避免了參數的耦合;給定輸入端增加的比例和微分部分的自由度,可以有效減小系統動態響應的最大超調量[3],減小擾動對系統的影響。仿真結果表明,筆者設計的控制器改善了輸入跟蹤響應和擾動響應特性曲線,并對模糊PID控制器的魯棒性進行了驗證。
1 模糊PID控制器①
1.1 模糊PID的控制結構

(1)
KFP=Ku(β1PKe+β2DKd)
(2)
KFI=β2PKeKu
(3)
KFD=β1DKdKu
(4)
式中KFD——模糊PID的微分增益;
KFI——模糊PID的積分增益;
KFP——模糊PID的比例增益;
β1、β2——比例和積分的組合系數。
由式(2)~(4)可以看出,模糊PID控制的3個參數和β1、β2都有關系,且存在耦合作用。
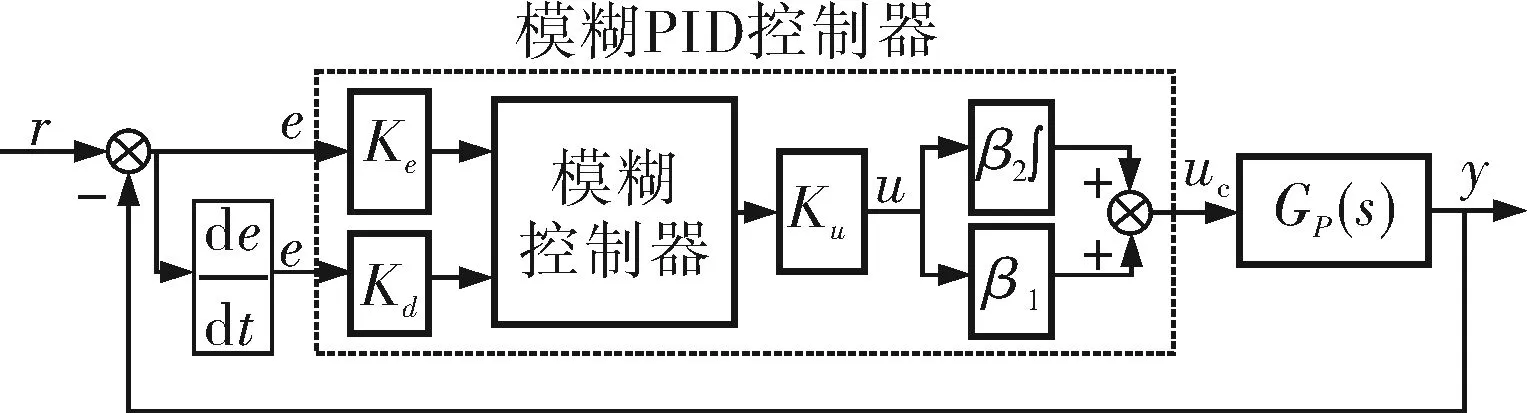
圖1 模糊PID控制框圖
1.2 改進型模糊PID控制器
為了解決上述模糊PID控制器的參數耦合問題,提出如圖2所示的控制結構,該模糊控制器是在模糊控制器的基礎上構造出一個積分作用與模糊控制器迭加共同構成PID控制器。此外,圖2還是一個多自由度的模糊PID控制器,在輸入端加入調節參數α1、α2和α3,則:
(5)
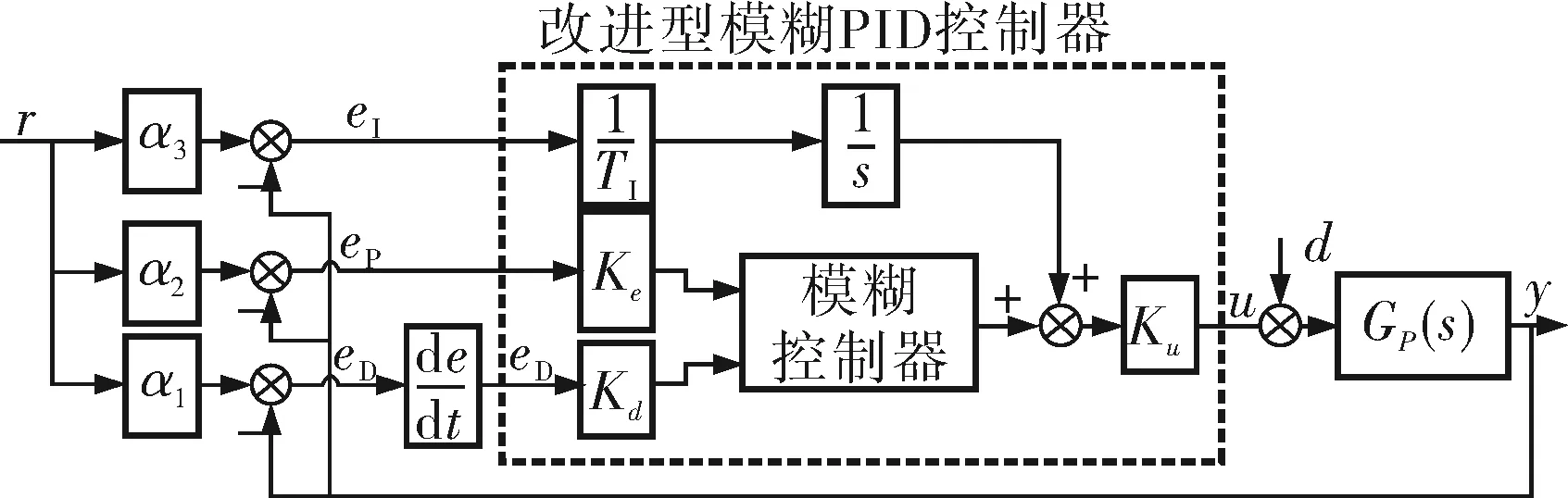
圖2 多自由度改進型模糊PID控制結構
通常取α3=1,模糊PID控制變為雙自由度模糊PID控制器,通過調整α1和α2調節給定的強度,可以有效地減小動態響應的最大超調量。假設系統的主導極點為σ+jω,參數的計算式為[4]:
(6)
輸入調節參數可以進一步等效為一個輸入濾波器F(s)/C(s),可以有效地簡化控制器的結構(圖3)[5]。輸入濾波器的計算公式為:
(7)
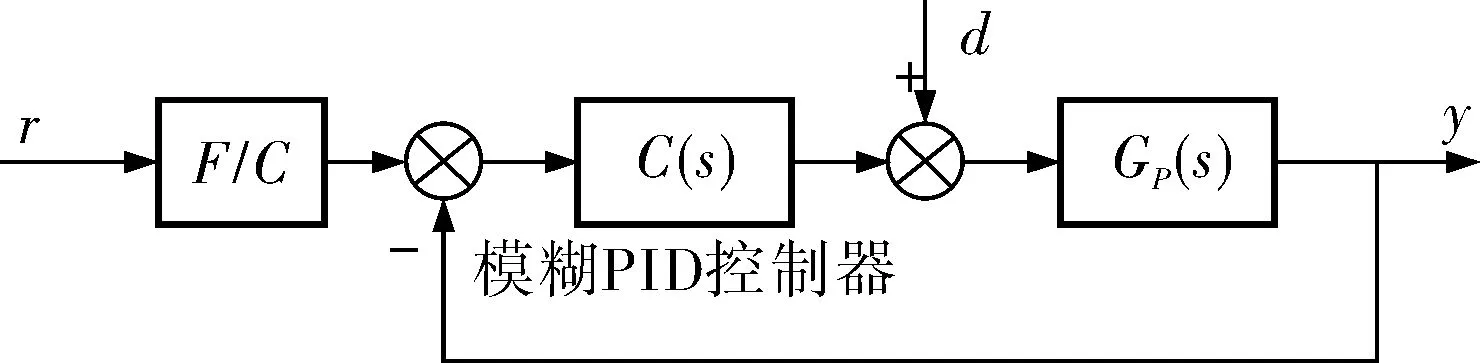
圖3 簡化等效后的系統框圖

(8)
系統的控制框圖如圖4所示。

圖4 系統控制框圖
1.3 模糊控制器設計
模糊控制器采用Mamdani推理算法,相關的推理運算法為:蘊含關系→求積、綜合算法→取大、清晰化→面積中心法[6]。
控制器參數整定步驟為:
a. 令α1、α2和Ku均為1,Kd=0,調整Ke、TI使系統單位階躍響應曲線收斂振蕩;
b. 調節Kd和Ku值,調整微分和控制器輸出強度,優化系統動態響應;
c. 調整α1、α2,進一步減小系統的動態超調量和調節時間;
d. 將輸入調節參數等效為輸入濾波器,簡化控制器結構。
2 仿真研究
系統仿真對象選為一階慣性加純延遲環節:
(9)
模糊PID控制器的參數Ke=0.27、Kd=0.25、Ku=1.5。
為驗證輸入調節參數α1、α2的控制效果,分別在t為0、40s時輸入單位階躍信號和d=0.2干擾信號,對比未加輸入調節參數控制器和雙自由度模糊PID控制器的系統動態響應曲線(圖5)。
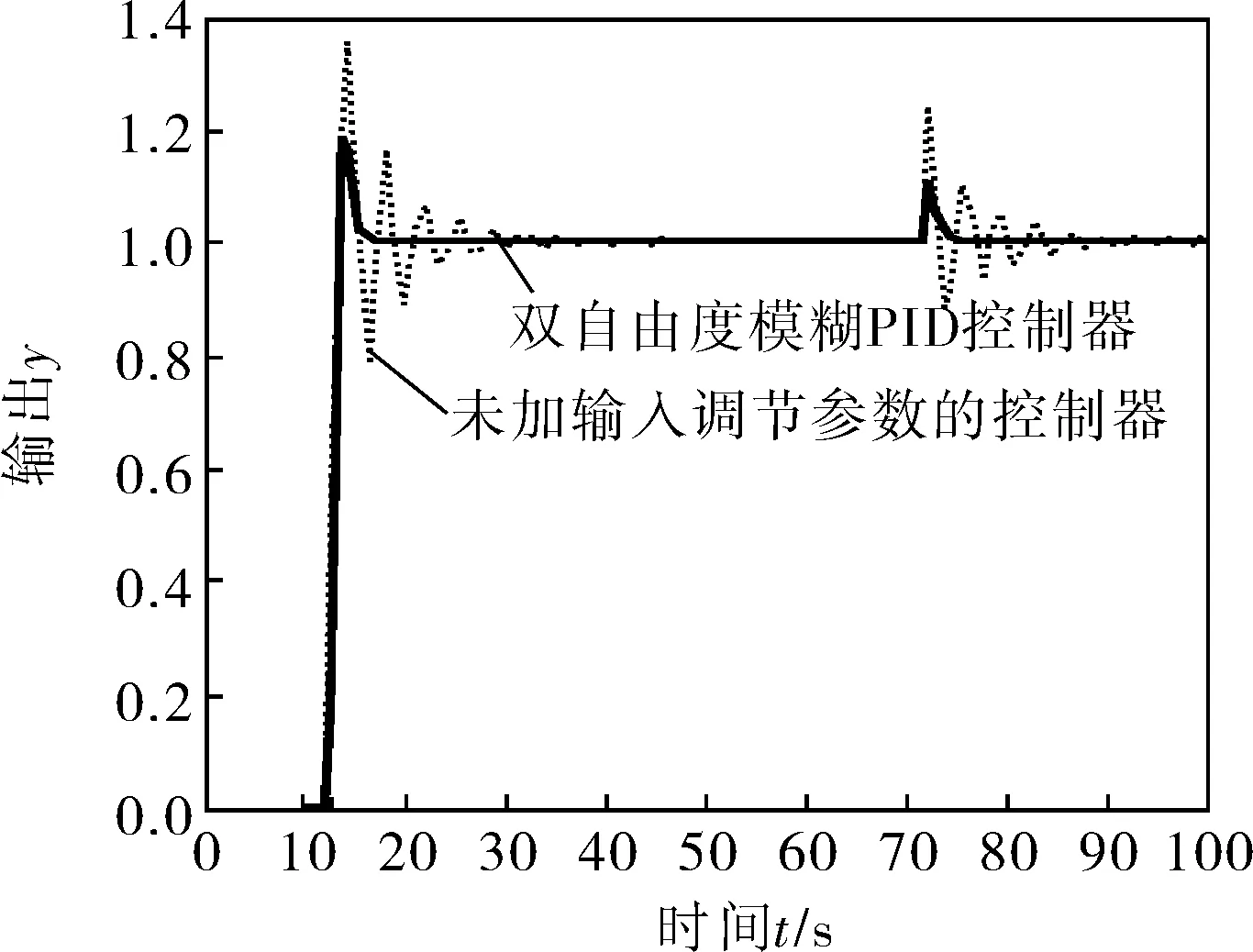
圖5 雙自由度控制器的動態響應曲線
驗證改進型雙自由度模糊PID控制器的魯棒性,解決實際應用中很難建立精確的對象數學模型的問題,將對象數學模型的K、T、τ分別增加和減小20%[7],得到的響應曲線如圖6~8所示。
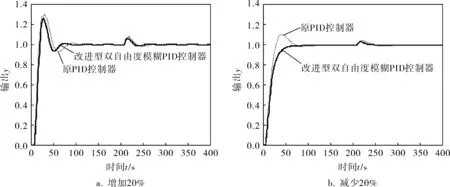
圖6 模型參數K變化時的響應曲線
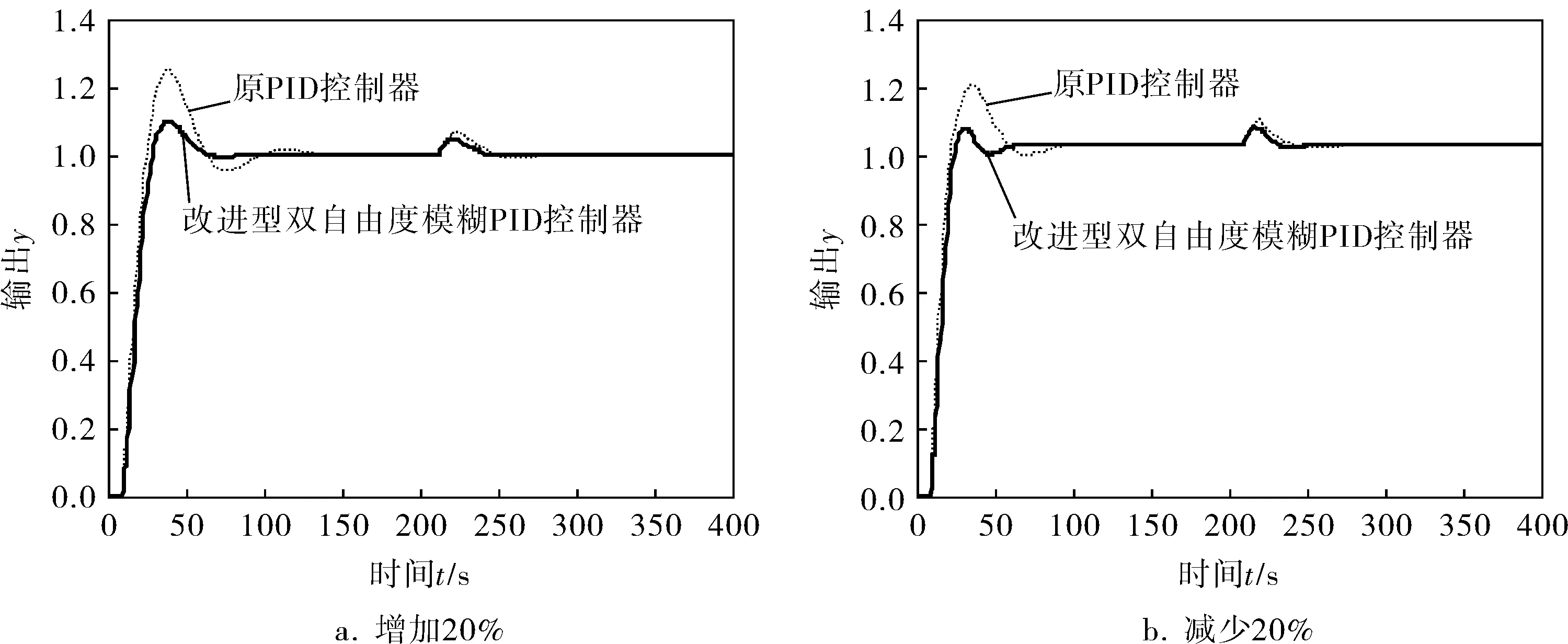
圖7 模型參數T變化時的響應曲線
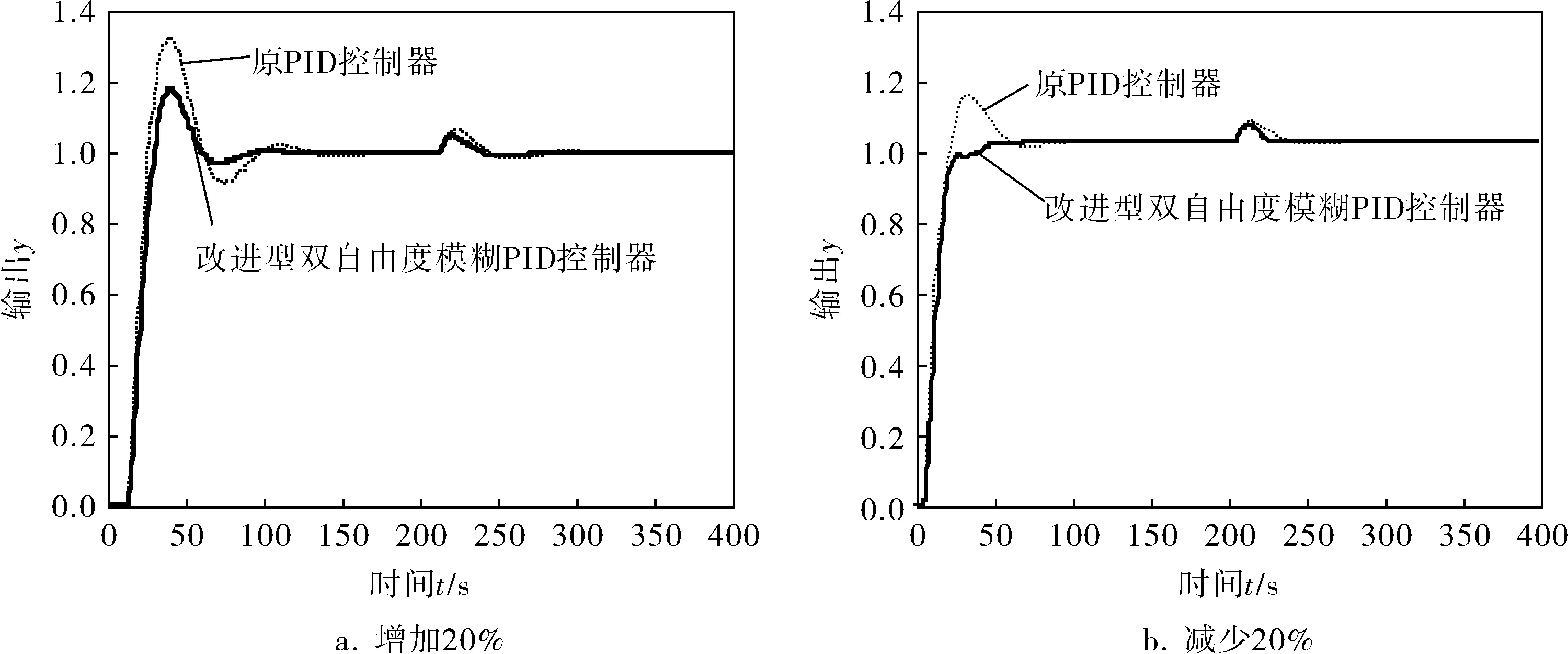
圖8 模型參數τ變化時的響應曲線
由圖5~8可知,未加入輸入調節參數控制器的動態響應的最大超調量為40%,雙自由度控制器的最大超調量為15%,可見雙自由度控制器可以明顯減小系統的最大超調量;加入干擾后雙自由度控制器能夠明顯提高系統抗干擾能力,模型失配時,改進型雙自由度模糊PID控制器的魯棒性優于原控制器。
3 結束語
模糊PID控制器增加雙自由自由度給定調節參數后,減小了系統的最大超調量,系統能夠快速達到穩態,提高抗干擾能力。此外,分析解決了控制器參數耦合問題,降低了系統的參數整定的難度,整定出的模糊PID參數具有良好的魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32