信息共享條件下傳感器組網發現概率建模
2012-08-27 08:15:28姚佩陽周翔翔張杰勇
電光與控制 2012年11期
王 欣, 姚佩陽, 周翔翔, 張杰勇
(空軍工程大學信息與導航學院,西安 710077)
0 引言
信息是決定現代化戰爭勝負的核心因素。利用現代網絡通信技術,將分布在不同區域的各種不同類型、不同頻段、不同工作模式的傳感器合理配置、統一部署,形成全區域、層次化的有機探測體系,快速、準確、高效地截獲和提取軍事信息,掌握瞬息萬變的戰場態勢,奪取制信息權,是信息時代戰爭制勝的關鍵。傳感器組網利用信息的冗余性和互補性來彌補單傳感器的不足[1],能克服獨立傳感器的性能局限和地勢、氣象等因素帶來的環境約束,獲得更廣泛的空間、時間探測范圍[2];傳感器節點之間互相進行信息共享,能提高協同檢測概率的正確性并減少誤報的可能性[3]。
目前對傳感器組網目標檢測的研究,多為通過傳感器組網對探測區域的重復覆蓋率研究目標發現概率的提高效果,和通過數據融合檢測研究目標檢測虛警概率的降低效果[4],但對于傳感器之間實時信息共享對檢測概率造成的影響,卻沒有進行專門的研究。因此,本文結合搜索論[5-6]重點研究了信息共享條件下的傳感器檢測發現概率。
1 單傳感器獨立探測的發現概率
為了求取傳感器在作戰區域空間各點上對目標的發現概率,通常使用空間分割的方法,將作戰空間進行離散化處理:高度上分為若干層,同一高度層的平面分成若干個小矩形網格,并以網格中心的發現概率作為整個網格所對應的小區域內的發現概率。作戰區域的高度分層和平面分格可參照文獻[1]進行。
設pi為傳感器Ri的瞬時探測發現概率,即Ri以一定速度進行掃描時,掃描視場與目標在一次接觸條件下的發現概率,pi與探測距離有關,在有效探測范圍內,可用形如pi=e-aidi的函數表示[7];di為在笛卡爾坐標系下,探測目標所在網格中心與傳感器Ri之間的歐氏距離;參數ai可表示Ri的發現概率隨著距離增加而減少的速率。
設λi為傳感器Ri的掃描頻率,即單位時間內掃描視場與目標接觸的次數,λi與Ri掃描區域范圍和掃描速度大小有關,令Ai為Ri的掃描區域范圍(以雷達為例,可用掃描扇區的張角表示);vi為掃描的速度(以雷達為例,可用角速度表示),則λi=vi/Ai。
假設目標通過一個網格需要一定時間Td,當目標進入Ri探測區域中的某一網格時開始計時,經時間t(t<Td)后,傳感器Ri對目標的發現概率為

其中,n=[λit],[·]為取整函數。
將式(1)中的n近似地用連續的時間函數λit表示,得到

可見,傳感器對目標的發現概率是隨時間累積而增長的,其對應的概率分布函數為指數分布

如果目標一直存在于該網格內,則傳感器Ri在該網格內發現目標的期望時間為

通常目標會以一定速度運動,在一定時間之后離開該網格。如果能降低發現目標的期望時間Ei,相當于提高了目標在該網格中被檢測發現的概率。由目標通過網格的時間Td,可得Ri在該網格中檢測發現到目標的概率為

2 信息共享條件下的傳感器發現概率
假設組網傳感器采用并行結構,為降低組網傳感器的虛警概率,通常采取K/N判決規則[8],在N部傳感器共同探測一個目標時,必須當其中任意K部(及K部以上)都發現目標時,才認為目標確實存在。如果各傳感器探測發現目標的期望時間能夠縮短,則整個傳感器網絡的發現期望時間也將縮短,相當于提高了一定探測時間的發現概率。
當組網傳感器之間存在協同作用時,先發現目標的傳感器可以將該目標的位置信息傳送給其他傳感器。如果傳感器Ri預先獲得了目標位置的正確信息再開始搜索目標,可以因此減小掃描范圍[9]。考慮目標存在運動,位置指示信息也存在一定誤差,假設減小之后的掃描區域范圍為Ai',通常Ai'<Ai,在掃描速度vi不變的情況下,λi'=vi/Ai',λi'> λi。由式(4)可知,Ri發現目標的期望時間會減少,即Ri在得到先驗信息的條件下,發現目標的平均時間縮短,相當于在一定的探測時間內提高了發現概率,即提高了探測發現的能力。
從目標進入Ri探測區域起計時,假設Ri在目標進入t1時間以后(要求t1<Td,否則目標已經進入其他區域了),接收到了其他傳感器的位置指示信息。但由于提供信息的傳感器受各種因素影響,提供的信息不一定可信,即位置指示信息可能是正確的,也可能是錯誤的。下面分別計算在位置指示信息正確和不正確情況下,傳感器的發現概率。
2.1 位置指示信息正確時傳感器發現概率
如果該位置指示信息正確,即目標真實存在于區域Ai'內。傳感器Ri在t1時刻已發現目標的概率有,在t1之后僅掃描Ai'區域,則在任意時刻t,Ri對目標的發現概率PiT(t)為

已知 λi'> λi,令 0 < pi<1,t1≥0,令 EiT為目標真實存在于區域Ai'內時,傳感器Ri發現目標的期望時間,則


2.2 位置指示信息不正確時傳感器發現概率
如果其他傳感器提供的位置指示信息不正確,即目標真實存在于區域Ai'外,傳感器Ri在Ai'內掃描一段時間至t2后仍不能發現目標,則將掃描范圍重新擴至Ai。要求t2<Td,則在任意時刻 t,Ri對目標的發現概率PiF(t)為
已知 λi'> λi,令0 <pi<1,t1≥0,t2>0,令 EiF為目標不存在于區域Ai'內時,傳感器Ri發現目標的期望時間,則


當 t2=t1時,有 EiF=Ei;當 t2>t1時,EiF>Ei。
此外,當傳感器Ri在Ai'內不能發現目標時,可以向提供位置指示信息的傳感器反饋一個出錯的報告,提示對方重新搜索確認。
2.3 傳感器綜合發現概率
假設位置指示信息正確的概率為PT,即目標以概率PT真實存在于區域Ai'內,以概率1-PT存在于區域Ai'外,則Ri的綜合發現概率Pi'(t)為

則傳感器Ri發現目標的綜合期望時間Ei'為

3 傳感器組網發現概率
上文給出了單傳感器在單個網格中的發現概率,而計算目標在進入探測區域之后的發現概率,需要結合目標的運動軌跡。假設目標在運動中經過M個網格,按通過順序依次編號為1,2,…,M,目標通過每個網格的時間相應記為 Td1,Td2,…,TdM。
對每一傳感器Ri,分別計算其在每一區域的發現概率在獨立探測條件下的計算方法為


假設目標在運動中共被N個傳感器Ri(i=1,2,…,N)檢測,分別計算出每個傳感器的發現概率Pi后,可以用K/N規則整體判決[10]。其計算式為

式中:P為整個傳感器網對特定運行軌跡目標的發現概率;D為狀態空間;S表示組網傳感器中發現目標的傳感器集合;表示組網傳感器中未發現目標的傳感器集合;k為集合S中的傳感器數目。且
4 仿真實驗
求解傳感器組網目標發現概率的關鍵是獲得單傳感器在各網格內的目標發現概率,下面以某一網格內的單傳感器探測為例,討論不同參數對信息共享條件下發現概率的影響。
取 λi=0.1,pi=0.8 進行仿真,并令 b= λi'/λi,b反映了信息共享條件下,指示的目標位置信息精確性對傳感器掃描頻率的改善作用。
1)位置指示信息正確時傳感器發現概率。分別取b=10,改變t1,以及取t1=3,改變b來觀察發現概率隨時間t的變化,如圖1所示。
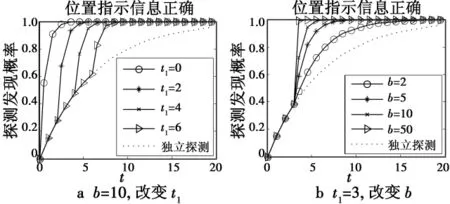
圖1 位置指示信息正確時傳感器發現概率對比圖Fig.1 The contrast of sensor discovery probability with the right location indication information
由圖1可見,自目標進入探測區域至傳感器接收到位置指示信息的時間t1和共享的位置指示信息對掃描頻率的改善程度b同時影響著信息共享條件下的發現概率,使之在時間點t1之后更快地增長,且時間點t1之后發現概率的增長速度由b的取值決定。b取值越大,發現概率增長越快,即信息共享條件下位置指示信息正確時,傳感器越早獲得位置指示信息,且指示的目標位置越精確,越有利于提高傳感器發現概率隨時間的增加速度。
2)位置指示信息不正確時傳感器發現概率。分別取 t2-t1=2,改變 t1,以及取 t1=3,改變 t2-t1來觀察發現概率隨時間t的變化。如圖2所示。

圖2 位置指示信息不正確時傳感器發現概率對比圖Fig.2 The contrast of sensor discovery probability with the wrong location indication information
由圖2可見,位置指示信息不正確時,信息共享條件下的發現概率永遠低于獨立發現概率,t1和t2-t1的取值對時間點t2之后的發現概率增長速度沒有影響。因此,位置指示信息不正確時,傳感器越晚獲得位置指示信息,且在錯誤目標位置指示區域內花費的掃描時間越短,越有利于提高傳感器發現概率隨時間的增加速度。
3)位置指示信息正確時傳感器發現期望時間。分別以t1和b為自變量,觀察另一參數改變時,期望的時間變化。如圖3所示。
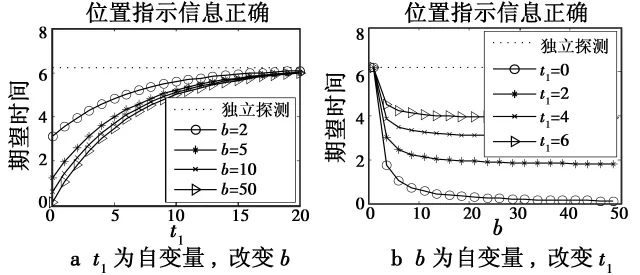
圖3 位置指示信息正確時傳感器發現期望時間對比圖Fig.3 The contrast of sensor discovery expectation time with the right location indication information
由圖3可知,信息共享條件下位置指示信息正確時,傳感器發現期望時間永遠小于獨立探測條件下的期望時間。隨著t1增加,信息共享條件下的發現期望時間也相應增加,當t1→∞時,該期望時間趨近于獨立探測條件下的期望時間;隨著b增加,信息共享條件下的發現期望時間降低,當b→∞時,該期望時間趨于一個特定值,該特定值是由t1取值決定的。因此,信息共享條件下位置指示信息正確時,傳感器越早獲得位置指示信息,且指示的目標位置越精確,越有利于降低期望時間。
4)位置指示信息不正確時傳感器發現期望時間。分別以t1和t2-t1為自變量,觀察另一參數改變時,期望時間的變化。如圖4所示。
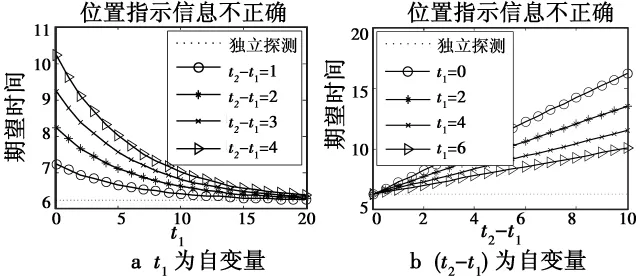
圖4 位置指示信息不正確時傳感器發現期望時間對比圖Fig.4 The contrast of sensor discovery expectation time with the wrong location indication information
由圖4可知,信息共享條件下位置指示信息不正確時,傳感器發現目標的期望時間永遠大于獨立探測條件下的期望時間。隨著t1增加,信息共享條件下的發現期望時間降低,當t1→∞時,該期望時間趨近于獨立探測條件下的期望時間;隨著t2-t1增加,信息共享條件下的發現期望時間也相應線性增加。因此,信息共享條件下位置指示信息不正確時,傳感器越晚獲得位置指示信息,且在錯誤目標位置指示區域內花費的掃描時間越短,反而越有利于降低期望時間。
5)傳感器綜合發現概率。取b=10,t1=3,t2-t1=2,改變PT,觀察發現概率隨時間t的變化,如圖5所示。
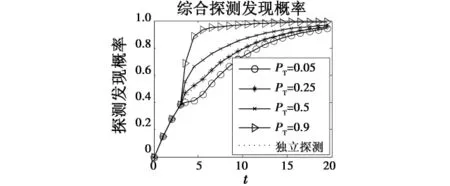
圖5 傳感器綜合發現概率對比圖Fig.5 The contrast of sensor integration discovery probability
由圖5可見,隨著位置指示信息正確概率PT的增加,在時間點t1之后,綜合發現概率以不同的速度增長。可以推測:當位置指示信息正確概率的取值小于某一閾值δ1時,綜合發現概率將永遠低于獨立探測發現概率,如圖中PT=0.05的曲線所示;當位置指示信息正確概率的取值超過某一閾值δ2時,綜合發現概率將永遠高于獨立探測發現概率,如圖中PT=0.5和PT=0.9的曲線所示;當位置指示信息正確概率的取值介于δ1和δ2之間時,綜合發現概率在一定時間內將高于獨立探測發現概率,之后一直低于獨立探測發現概率,如圖中PT=0.25的曲線所示。
6)傳感器綜合發現期望時間。在b、t1、t2-t1三個參數中,分別固定其中兩個,觀察第3個參數改變時,觀察發現期望時間隨位置指示信息正確概率PT的變化。如圖6所示。
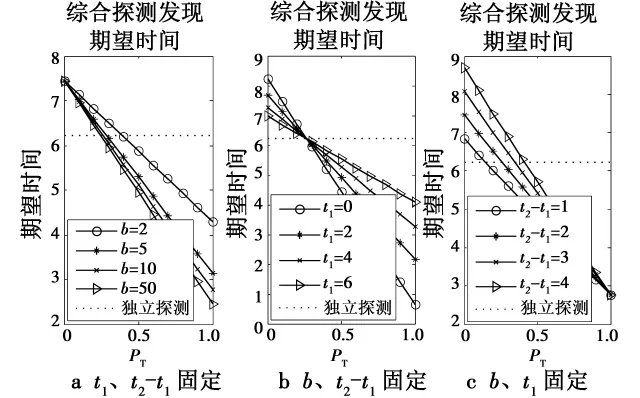
圖6 傳感器綜合發現期望時間對比圖Fig.6 The contrast of sensor integration expectation time
由圖6可見,隨著位置指示信息正確概率PT增加,能夠降低綜合發現期望時間。當固定b、t1和t2-t1中的任意兩個參數,改變第3個參數時,信息共享條件下的發現期望時間曲線隨PT呈線性變化,期望時間最大值出現在PT=0處,最小值出現在PT=1處,且當PT大于某一值時,信息共享條件下的期望時間將低于獨立探測條件下的期望時間,表明隨著位置指示信息正確概率增大,傳感器發現目標的期望時間也隨之降低。其中,圖6a取t1=3,t2-t1=2,改變 b的取值,信息共享條件下的發現期望時間最大值不變;圖6b取bi=10,t2-t1=2,改變t1的取值,信息共享條件下的發現期望時間曲線與獨立探測條件下的期望時間曲線交于同一點;圖6c取 bi=10,t1=3,改變 t2-t1的取值,信息共享條件下的發現期望時間最小值不變。由此得到結論:傳感器獲得位置指示信息的時間和其在位置指示區域內花費的時間,共同決定了綜合發現期望時間的最大值;目標位置信息的精確性和傳感器獲得位置指示信息的時間,共同決定了綜合發現期望時間的最小值;目標位置信息的精確性和傳感器在位置指示區域內花費的時間,共同決定了使信息共享條件下綜合發現期望時間等于獨立探測條件下期望時間的對應PT值。
當位置指示信息正確概率較低時,信息共享對傳感器綜合發現概率和傳感器綜合發現期望時間的影響都是負面的。為降低位置指示信息正確概率較低時信息共享的不利影響,可以改變協同規則:當傳感器接收到位置指示信息時,先根據提供信息的傳感器可信度判斷該信息正確的概率,如果正確概率低于一定值,該傳感器將不改變掃描區域,繼續在原定區域內搜索目標。在此期間,傳感器可能會接收到來自其他傳感器的位置指示信息,此時可綜合前面接收到的信息,再進行信息正確概率的判斷,直到接收的位置指示信息正確概率達到一定閾值,才開始改變掃描區域大小。
5 結論
戰場組網傳感器之間通過信息共享,能夠提高目標發現概率,降低目標發現的期望時間。本文重點研究了目標位置指示信息共享條件下,單傳感器的目標發現概率和傳感器網絡的目標發現概率求解方法。通過仿真,分析了不同參數的取值對目標發現概率和發現期望時間的影響,對傳感器組網方式和協同機制設計有一定的參考價值。研究結果也可用于單傳感器和傳感器組網的作戰效能評估。
[1] 楊志強,謝虹.基于信息原理的雷達網抗干擾性能評估[J].系統工程與電子技術,2004,26(1):34-35,39.
[2] CHONG C Y,KUMAR S P.Sensor networks:Evolution,opportunities,and challenges[C]//Proceedings of the IEEE,2003,91(8):1247-1256.
[3] IYENGAR S S,BOOKS R R.分布式傳感器網絡(上)[M].夏立,江漢紅,譯.北京:電子工業出版社,2010.
[4] 李修和,冷鋒.復雜電磁環境下組網雷達的作戰效能建模[J].軍事運籌與系統工程,2006,20(4):20-24.
[5] 汪新剛,謝曉方,李雪.基于搜索論的反艦導彈捕捉概率研究[J].指揮控制與仿真,2011,33(1):34-38.
[6] 劉軍偉,沙基昌,陳超.搜索論研究綜述[J].艦船電子工程,2010,5:10-14,58.
[7] DHILLEN S S,CHAKRABARTY K.Sensor placement for effective coverage and surveillance in distributed sensor networks[C]//Proceedings of IEEE Wireless Communications and Networking Conference,2003:1609-1614.
[8] 朱彬,胡瑋,鄧科,等.多波段光學探測系統的探測概率研究[J].電子科技大學學報,2008,37(3):339-342.
[9] PERRY W,BUTTON R W,BRACKEN J,et al.Measures of effectiveness for the information-age navy:The effects of network-centric operations on combat outcomes[R].Santa Monica Calif.:RAND Corp,MR-1449-Navy,2002.
[10] 楊大志,丁建江,謝超.基于分布式檢測的組網探測概率建模與仿真[J].現代雷達,2008,30(12):24-27.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32