剛構(gòu)橋模態(tài)測試測點布置優(yōu)化研究
2025-02-20 00:00:00肖寅冬
科技創(chuàng)新與應(yīng)用 2025年5期
關(guān)鍵詞:優(yōu)化算法
摘" 要:為更優(yōu)地對結(jié)構(gòu)進(jìn)行動模態(tài)測試,該文提出采用粒子群算法對拾振傳感器的布置位置進(jìn)行優(yōu)化的解決方案。首先對結(jié)構(gòu)的振型測試進(jìn)行介紹,重點介紹優(yōu)化的需求和優(yōu)化的技術(shù)流程,其次對目標(biāo)函數(shù)的形式進(jìn)行講解,然后講解粒子群的優(yōu)化流程,最后以一個四跨連續(xù)剛構(gòu)為案例對該文所提方法進(jìn)行驗證,結(jié)果表明,優(yōu)化后的目標(biāo)函數(shù)有較大程度的減少,說明優(yōu)化后的位置可以更好地感知結(jié)構(gòu)振動,研究可為結(jié)構(gòu)模態(tài)測試提供依據(jù)。
關(guān)鍵詞:橋梁工程;橋梁振動;測點布置;優(yōu)化算法;動模態(tài)測試
中圖分類號:U446.1" " " 文獻(xiàn)標(biāo)志碼:A" " " " " 文章編號:2095-2945(2025)05-0159-04
Abstract: For better test of dynamic modal on structure, a particle swarm optimization (PSO) algorithm is adopted to optimize vibration-pick sensor location. First, the vibration mode test of the structure is introduced, focusing on the optimization requirements and optimization technical process. Secondly, the form of the objective function is explained, and then the optimization process of the particle swarm is explained. Finally, a four-span continuous rigid frame is used as a case to verify the proposed method. The results show that the optimized objective function is reduced to a large extent, which shows that the optimized position can better sense structural vibration, and the research can provide a basis for structural modal testing.
Keywords: bridge engineering; bridge vibration; measuring point layout; optimization algorithm; dynamic modal test
隨著我國經(jīng)濟(jì)的發(fā)展,橋梁運(yùn)營荷載載重和荷載頻率均有明顯提升。由于荷載的增加以及橋梁服役時間的增加,部分橋梁出現(xiàn)了不同程度的損傷[1-2],如混凝土老化、鋼筋銹蝕、混凝土底板裂縫等。橋梁損傷將直接影響結(jié)構(gòu)的服役水平,長期將影響結(jié)構(gòu)的安全。近年來國內(nèi)外均出現(xiàn)由于橋梁老化損傷導(dǎo)致的安全事故,造成了嚴(yán)重的損失。
為對結(jié)構(gòu)安全及時進(jìn)行感知,從而為運(yùn)營提供決策,減少經(jīng)濟(jì)及人員損失,部分工程在橋梁上安裝了健康監(jiān)測系統(tǒng)[3-4]。橋梁健康監(jiān)測系統(tǒng)通過安裝在橋梁上的一些傳感器來感知結(jié)構(gòu)的本身響應(yīng)以及外界環(huán)境,常用的傳感器有拾振器,即加速度傳感器、溫度傳感器、風(fēng)速儀等。通過對傳感器收集的信息進(jìn)行分析,獲取結(jié)構(gòu)的運(yùn)營狀態(tài),如模態(tài)、頻率等信息,為進(jìn)一步運(yùn)營決策提供依據(jù)。橋梁振型與結(jié)構(gòu)的運(yùn)營狀態(tài)有相關(guān)關(guān)系,因此如何放置傳感器將直接影響對結(jié)構(gòu)的感知情況。
1" 優(yōu)化原理
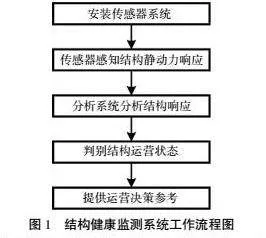
結(jié)構(gòu)健康監(jiān)測需要對結(jié)構(gòu)進(jìn)行精確的感知,從而獲取結(jié)構(gòu)原始信息,并根據(jù)結(jié)構(gòu)的信息分析出結(jié)構(gòu)的運(yùn)營狀態(tài),從而為下一步結(jié)構(gòu)的運(yùn)行決策提供依據(jù),具體步驟如圖1所示。
在眾多的結(jié)構(gòu)檢測方法中,對結(jié)構(gòu)的動模態(tài)進(jìn)行檢測,具有不中斷交通,對現(xiàn)有結(jié)構(gòu)無損傷的優(yōu)點,被廣泛采用[5]。動模態(tài)檢測[6]的基本原理是在結(jié)構(gòu)上安裝一些傳感器,從而獲取結(jié)構(gòu)的振動特性,常用的獲取振動信息的儀器有拾振器、振弦式動應(yīng)變計等。在獲取振動的過程中,需要安裝多個傳感器,從而對結(jié)構(gòu)的振動信息有更加詳細(xì)的感知。直接獲取的振動時程數(shù)據(jù)無法直接運(yùn)用于結(jié)構(gòu)損傷分析,需要對其進(jìn)行處理,其中第一步需要從振動數(shù)據(jù)中獲取的信息就是結(jié)構(gòu)模態(tài)振型。在結(jié)構(gòu)發(fā)生損傷時,結(jié)構(gòu)的振型會發(fā)生改變,通過對比結(jié)構(gòu)振型損傷前后的變化來推斷結(jié)構(gòu)的健康狀況。
因此對結(jié)構(gòu)振型感知得越詳細(xì),對結(jié)構(gòu)的損傷識別也就越有利[7]。因此,對于結(jié)構(gòu)的測試,安裝的傳感器越多越有利,但是考慮到數(shù)據(jù)冗余度和經(jīng)濟(jì)的限制,往往只能通過有限的傳感器數(shù)量來更好地測試結(jié)構(gòu)的信息,這就需要對傳感器的布置位置進(jìn)行更好的決策,即傳感器的優(yōu)化布置問題。從數(shù)學(xué)角度分析,該問題就是通過有限的點來對結(jié)構(gòu)的面甚至三維的體有更好的推測。
結(jié)構(gòu)振型分為不同階次的振型,對于橋梁結(jié)構(gòu),前幾階也就是低階模態(tài)對結(jié)構(gòu)的全局損傷更為敏感。因此在優(yōu)化測點布置時,應(yīng)盡可能全面地感知前幾階的模態(tài)振型。對結(jié)構(gòu)的感知程度可以通過以下目標(biāo)函數(shù)來定義
式中:O是目標(biāo)函數(shù),即優(yōu)化對象;?椎是根據(jù)測點測試的信息通過樣條曲線擬合得到的模態(tài)信息;H是通過有限元模型分析得到的模態(tài)信息;i是第i階模態(tài);n是計入目標(biāo)函數(shù)的模態(tài)階數(shù)。
優(yōu)化過程即通過不斷改變測點布置信息,從而獲得O值最小,即測試的與真實的模態(tài)信息最為符合。
2" 優(yōu)化方法
在得到目標(biāo)函數(shù)和測點布置的位置限制之后,就可以將問題描述為:通過在定義域(傳感器布置的可行空間)內(nèi),尋找到能使目標(biāo)函數(shù)達(dá)到最小的一組位置的排列組合[8]。尋找的方法即為優(yōu)化方法,優(yōu)化方法通常可以分為傳統(tǒng)算法和新型算法。傳統(tǒng)算法主要有牛頓迭代算法、梯度下降算法,以及這些算法的衍生算法。傳統(tǒng)算法,特別是梯度下降算法具有優(yōu)化速度快的特點,技術(shù)成熟,實現(xiàn)簡單,被廣泛應(yīng)用于各行各業(yè),即使是目前最優(yōu)流行的深度學(xué)習(xí)算法,也主要以梯度下降作為優(yōu)化器。但該類算法對初始點的選擇較為敏感,因此魯棒性相對較差,當(dāng)選擇不同的優(yōu)化初始點時,最終優(yōu)化的結(jié)果可能不同。鑒于此,一些作者提出了改進(jìn)的算法,雖然改進(jìn)的策略不同,但目的主要是增加對初始點的魯棒性。
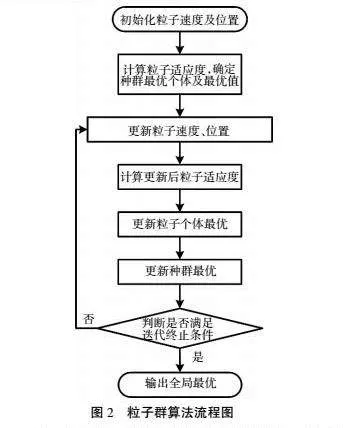
另一類算法是新型算法,尤其是群智能算法[9-10]。這類算法通過仿生原理來實現(xiàn)目標(biāo)尋優(yōu)。粒子群算法[11-13]是其中較為新穎、效果較優(yōu)的一種算法。粒子群的主要進(jìn)化流程如下,具體如圖2所示。
步驟1,初始化。在問題的可行域內(nèi)(傳感器可布置的空間),隨機(jī)初始化一群粒子。每個粒子有自己的位置和速度。位置表示傳感器的布置位置,速度影響著粒子在搜索空間內(nèi)的移動方向和速度。可采用的初始化方法有:隨機(jī)初始,CCD布置等。
步驟2,評估適應(yīng)度。計算每個粒子的適應(yīng)度,即目標(biāo)函數(shù)值。目標(biāo)函數(shù)衡量了當(dāng)前傳感器布置方案的優(yōu)劣程度,如目標(biāo)函數(shù)值越小則表示傳感器布置方案越好。
步驟3,更新個體最優(yōu)。根據(jù)當(dāng)前粒子歷史上最好的位置(個體最優(yōu)),更新每個粒子的個體最優(yōu)位置。
步驟4,更新全局最優(yōu)。從所有粒子的個體最優(yōu)中選擇出最好的位置(全局最優(yōu)),作為整個群體的全局最優(yōu)位置。
步驟5,更新粒子位置和速度。根據(jù)個體最優(yōu)和全局最優(yōu),更新每個粒子的速度和位置。速度更新考慮了粒子的慣性、個體經(jīng)驗和群體經(jīng)驗的權(quán)衡,位置更新則根據(jù)新的速度進(jìn)行調(diào)整。
步驟6,迭代。重復(fù)步驟2到步驟5,直至達(dá)到設(shè)定的迭代終止條件(如達(dá)到最大迭代次數(shù)或目標(biāo)函數(shù)值收斂到預(yù)設(shè)閾值)為止。
步驟7,輸出結(jié)果。最終得到的全局最優(yōu)位置即為優(yōu)化后的傳感器布置方案,對應(yīng)的目標(biāo)函數(shù)值表示了該方案的優(yōu)化效果。
粒子群算法通過不斷地在搜索空間內(nèi)調(diào)整粒子位置和速度,利用個體和群體的經(jīng)驗信息來引導(dǎo)搜索,從而尋找到最優(yōu)的傳感器布置方案。
3" 優(yōu)化效果驗證
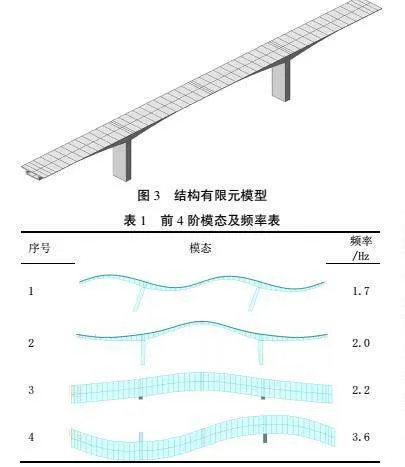
某四跨剛構(gòu)橋,跨徑組合為(55+100+55)m,主梁截面形式為單箱單室。橋墩形式為雙肢薄壁墩。采用Midas/Civil軟件建立結(jié)構(gòu)的三維有限元模型,模型如圖3所示。通過對模型進(jìn)行動力分析得到結(jié)構(gòu)模態(tài)及頻率,見表1。
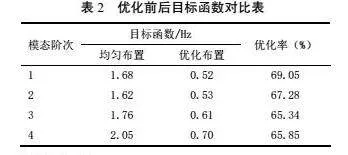
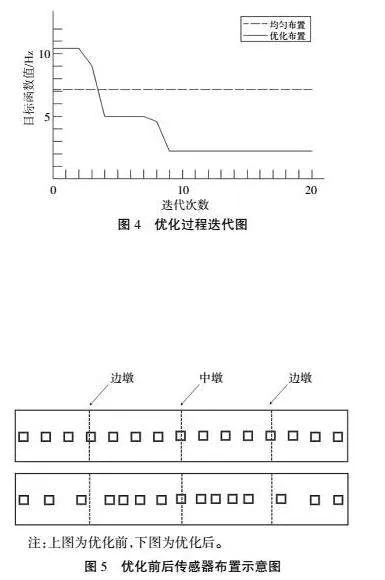
從圖5中可以看出,相比優(yōu)化前的均勻布置,優(yōu)化后測點布置在邊跨和中跨的跨中,這與理論分析相一致,因為在橋梁的低階振動模態(tài)中,振型主要以豎向振動為主,豎向振動在跨中位置響應(yīng)更大,因此對該位置擬合更優(yōu)的話,能更好地與結(jié)構(gòu)的實際振型相符合,從而降低目標(biāo)函數(shù)值。但是可以看出在中墩位置,傳感器的位置并未發(fā)生較大變化,這主要是因為在中墩處無論處于何種振型,該處的豎向位移始終為零,即該點為其他位置點提供了零點依據(jù)。根據(jù)振型計算優(yōu)化前后目標(biāo)函數(shù)值,結(jié)果見表2。
從表2中可以看出,在均勻布置的情況下,結(jié)構(gòu)的目標(biāo)函數(shù)隨著模態(tài)階次逐漸升高,目標(biāo)函數(shù)值也越大,說明高階模態(tài)的振型更加負(fù)責(zé),也更加難以擬合。優(yōu)化布置后,目標(biāo)函數(shù)值均有明顯下降,下降幅值均在65%以上,說明優(yōu)化效果良好。
4" 效益分析
4.1" 成本效益比較
傳感器數(shù)量與成本關(guān)系:在傳統(tǒng)的均勻布置方案中,通常需要15個傳感器沿橋梁軸線均勻布置,假設(shè)每個傳感器成本為1 000元,總成本為15 000元。而通過粒子群優(yōu)化后的布置方案,僅需同樣數(shù)量的傳感器,但布置更集中,成本僅為10 000元,節(jié)省了5 000元的設(shè)備采購成本。
4.2" 維護(hù)與管理成本
布置位置對維護(hù)影響:優(yōu)化布置使傳感器更集中地安裝在結(jié)構(gòu)振動顯著的位置,減少了傳感器的日常巡檢和維護(hù)頻率,降低了管理成本。
長期運(yùn)行成本:通過優(yōu)化布置方案,每年節(jié)省的維護(hù)成本預(yù)計達(dá)到2 000元,同時減少了數(shù)據(jù)分析和結(jié)構(gòu)監(jiān)測的人力資源投入,節(jié)省了約3 000元的人力成本。
4.3" 操作性與可操作性
實施難度比較:優(yōu)化后的傳感器布置方案大大提高了安裝效率和精確度,平均每個傳感器的安裝時間從傳統(tǒng)的1小時縮短到30分鐘,大大減少了人力資源的浪費(fèi)和誤差發(fā)生的可能性。
操作便捷性:優(yōu)化后的布置方案使得數(shù)據(jù)采集和分析更加直觀和有效,操作員在實地操作時減少了50%的操作步驟,提高了操作的便捷性和實用性。
4.4" 數(shù)據(jù)準(zhǔn)確性和應(yīng)用價值
模態(tài)測試精確性:優(yōu)化布置方案可以顯著提高結(jié)構(gòu)振動特性的獲取精度,模態(tài)測試數(shù)據(jù)的標(biāo)準(zhǔn)偏差從傳統(tǒng)布置的5%降低到2%,提高了數(shù)據(jù)的準(zhǔn)確性和可信度。
運(yùn)營決策支持:準(zhǔn)確的模態(tài)信息為橋梁的維護(hù)和修復(fù)提供了科學(xué)依據(jù),通過優(yōu)化后的數(shù)據(jù)分析,預(yù)計每年可以避免因橋梁損傷而導(dǎo)致的維修費(fèi)用約10 000元,同時降低了運(yùn)營風(fēng)險和維護(hù)成本,增強(qiáng)了橋梁的安全性和可靠性。
5" 結(jié)論
1)測試結(jié)構(gòu)振動時程曲線時,采用均勻布置的情況下,實際振動曲線與通過傳感器感知到的曲線有較大出入。
2)采用粒子群優(yōu)化傳感器布置位置,可以大幅提高對實際振型的擬合程度,且提高程度均在65%以上。
3)優(yōu)化后的布置方案提高了傳感器安裝和操作效率,平均每個傳感器的安裝時間減少了50%。操作員在實地操作中的操作步驟減少了一半,大大提升了操作的便捷性和實用性。
4)數(shù)據(jù)的準(zhǔn)確性和應(yīng)用價值也得到了顯著提升,模態(tài)測試數(shù)據(jù)的精度明顯提高,為橋梁結(jié)構(gòu)的維護(hù)和運(yùn)營決策提供了更可靠的數(shù)據(jù)支持。
參考文獻(xiàn):
[1] 彭衛(wèi)兵,沈佳棟,唐翔,等.近期典型橋梁事故回顧、分析與啟示[J].中國公路學(xué)報,2019,32(12):132-144.
[2] 孔令元.高速公路服役橋梁功能狀況關(guān)鍵評價指標(biāo)[J].交通世界,2018(24):108-109.
[3] 胡仁健.面向橋結(jié)構(gòu)健康管理的大數(shù)據(jù)分析方法及實現(xiàn)[D].南京:東南大學(xué),2019.
[4] 馬天立.基于深度學(xué)習(xí)的橋梁健康監(jiān)測數(shù)據(jù)有效性診斷研究[D].重慶:重慶交通大學(xué),2019.
[5] 汪耀武.某立交橋動載試驗實例研究[J].溫州大學(xué)學(xué)報(自然科學(xué)版),2015,36(3):50-56.
[6] 胡大新.八渡南盤江大橋模態(tài)試驗分析[J].鐵道建筑,2013(4):1-5.
[7] 黃笑犬,張謝東,鄧雅思,等.基于退火策略混沌遺傳算法的橋梁傳感器優(yōu)化布置研究[J].武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),2019,43(4):784-790.
[8] 王宇軒.大跨橋梁結(jié)構(gòu)健康監(jiān)測系統(tǒng)測點優(yōu)化布置工具箱的開發(fā)及應(yīng)用[D].大連:大連理工大學(xué),2019.
[9] 周廣東,操聲浪,劉定坤.基于自適應(yīng)動態(tài)懲罰遺傳算法的橋梁監(jiān)測無線測點優(yōu)化研究[J].建筑科學(xué)與工程學(xué)報,2018,35(5):86-92.
[10] 吳圣斌,張笑華,王黎園,等.基于改進(jìn)人工魚群算法的傳感器優(yōu)化布置[J].南昌大學(xué)學(xué)報(工科版),2019,41(3):253-259.
[11] 谷曉琳,黃明,梁旭,等.一種改進(jìn)慣性權(quán)重的混沌粒子群優(yōu)化算法[J].大連交通大學(xué)學(xué)報,2020,41(3):102-106,113.
[12] 秦世強(qiáng),胡佳,曹鴻猷,等.基于試驗數(shù)據(jù)的大跨度拱橋有限元模型修正[J].中國公路學(xué)報,2019,32(7):66-76.
[13] 劉海彎,劉虹延,李鐸.基于粒子群算法的連續(xù)剛構(gòu)有限元模型修正[J].蘭州工業(yè)學(xué)院學(xué)報,2018,25(4):11-14,21.
猜你喜歡
課程教育研究·新教師教學(xué)(2016年6期)2017-04-10 00:22:41
數(shù)字技術(shù)與應(yīng)用(2017年2期)2017-04-08 09:30:10
電子技術(shù)與軟件工程(2017年4期)2017-03-27 13:49:48
湖南師范大學(xué)學(xué)報·自然科學(xué)版(2017年1期)2017-03-14 16:08:34
科技與創(chuàng)新(2017年1期)2017-02-16 19:36:23
科技創(chuàng)新導(dǎo)報(2016年21期)2016-12-17 13:07:48
計算機(jī)時代(2016年7期)2016-07-15 16:12:30
現(xiàn)代經(jīng)濟(jì)信息(2016年4期)2016-06-20 18:29:48
科技與創(chuàng)新(2016年7期)2016-04-20 09:17:04
科技傳播(2016年3期)2016-03-25 00:23:31