爬壁機(jī)器人全遍歷路徑規(guī)劃方法
2023-05-11 06:49:12楊建邦李夢(mèng)陽(yáng)毛方海
中國(guó)新技術(shù)新產(chǎn)品 2023年3期
楊建邦 李夢(mèng)陽(yáng) 毛方海
(1.山西大唐國(guó)際神頭發(fā)電有限責(zé)任公司,山西 朔州 036000;2.中國(guó)大唐集團(tuán)科學(xué)技術(shù)研究總院有限公司西北電力試驗(yàn)研究院,陜西 西安 710000;3.合肥哈工特安智能科技有限公司,安徽 合肥 230000)
隨著機(jī)光電算控及其融合技術(shù)的日益成熟,機(jī)器人技術(shù)也快速發(fā)展,在危險(xiǎn)救援、災(zāi)害搜救以及無(wú)人巡檢等領(lǐng)域獲得了廣泛應(yīng)用。在各種類型的機(jī)器人中,爬壁機(jī)器人具有吸附穩(wěn)定、自主控制以及自動(dòng)化作業(yè)等優(yōu)點(diǎn),為解決很多實(shí)際問(wèn)題提供了理想的方案[1]。火電廠的水冷壁需要進(jìn)行定期檢查和清掃。長(zhǎng)期以來(lái),這項(xiàng)工作都通過(guò)人工的方式完成,主要手段是目測(cè)、望遠(yuǎn)鏡觀測(cè),對(duì)位置較高或難以自然觀察的位置來(lái)說(shuō),還需要搭建腳手架。通過(guò)人工完成火電廠水冷壁檢查的方式不僅檢測(cè)精度、檢測(cè)效率低,而且還存在嚴(yán)重的安全隱患,爬壁機(jī)器人給火電廠水冷壁的自動(dòng)化巡檢和清掃提出了完美的解決方案。針對(duì)水冷壁的爬壁機(jī)器人設(shè)計(jì)包括機(jī)器人本體設(shè)計(jì)、D-H 建模、運(yùn)動(dòng)學(xué)分析、動(dòng)力學(xué)分析以及路徑規(guī)劃等關(guān)鍵內(nèi)容[2]。其中,路徑規(guī)劃方法的合理性直接決定了爬壁機(jī)器人巡檢和清掃的工作效率[3]。該文以火電廠水冷壁巡檢和清掃為研究背景,在對(duì)爬壁機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析的基礎(chǔ)上,提出一種全遍歷的路徑規(guī)劃方法,并通過(guò)仿真試驗(yàn)進(jìn)行驗(yàn)證,以期為火電廠水冷壁自動(dòng)化巡檢和清掃提供解決方案。
1 火電廠水冷壁爬壁機(jī)器人運(yùn)動(dòng)學(xué)分析
為了提高火電廠水冷壁巡檢和清掃效果,在進(jìn)行爬壁機(jī)器人路徑規(guī)劃前,應(yīng)充分了解其運(yùn)動(dòng)狀態(tài),使其能夠準(zhǔn)確地按照規(guī)劃的路徑運(yùn)動(dòng)。因此,在路徑規(guī)劃前要先對(duì)爬壁機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析。
在對(duì)爬壁機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析的過(guò)程中,須設(shè)定3個(gè)假設(shè)條件:1) 將爬壁機(jī)器人整體看作一個(gè)剛體,即運(yùn)動(dòng)過(guò)程中因受力、接觸以及碰撞等造成的變形忽略不計(jì)。2)爬壁機(jī)器人底部為履帶結(jié)構(gòu),忽略履帶在運(yùn)動(dòng)過(guò)程中可能存在的微小橫向位移。3) 假設(shè)爬壁機(jī)器人運(yùn)動(dòng)的水冷壁壁面為平面并且各處提供給機(jī)器人的摩擦力是一樣的。
在爬壁機(jī)器人運(yùn)動(dòng)的過(guò)程中,其機(jī)器人本體可以在二維地圖平面上按照任意路徑行進(jìn),其前提是運(yùn)動(dòng)路徑上沒(méi)有遮擋或障礙。不論何種復(fù)雜形式的行進(jìn)或運(yùn)動(dòng),其實(shí)質(zhì)就是連續(xù)的平移運(yùn)動(dòng)和旋轉(zhuǎn)運(yùn)動(dòng)的組合。與平移運(yùn)動(dòng)相比,從數(shù)學(xué)意義上描述爬壁機(jī)器人做旋轉(zhuǎn)運(yùn)動(dòng)的過(guò)程更復(fù)雜。
以圖1 為例,分析爬壁機(jī)器人從水冷壁A點(diǎn)移動(dòng)到B點(diǎn)的運(yùn)動(dòng)過(guò)程。
如圖1 所示,在爬壁機(jī)器人的運(yùn)動(dòng)過(guò)程中,其車體自身配置一個(gè)坐標(biāo)系,從而便于表示與地圖固定坐標(biāo)系間的關(guān)系。在A點(diǎn),爬壁機(jī)器人的位姿如公式(1)所示。

圖1 爬壁機(jī)器人從A 點(diǎn)移動(dòng)到B 點(diǎn)的示意情況
式中:XA為爬壁機(jī)器人在A點(diǎn)的橫坐標(biāo);YA為爬壁機(jī)器人在A點(diǎn)的縱坐標(biāo);θA為爬壁機(jī)器人A點(diǎn)的角度坐標(biāo);XA為爬壁機(jī)器人在A點(diǎn)速度向量的水平分量;YA為爬壁機(jī)器人在A點(diǎn)速度向量的垂直分量;θA為爬壁機(jī)器人在A點(diǎn)的角速度;v為爬壁機(jī)器人的移動(dòng)速度;ω為爬壁機(jī)器人的轉(zhuǎn)動(dòng)角速度。
2 爬壁機(jī)器人的全遍歷路徑規(guī)劃方法
在明確爬壁機(jī)器人的運(yùn)動(dòng)原理后,進(jìn)一步構(gòu)建路徑規(guī)劃方法,以實(shí)現(xiàn)機(jī)器人的自動(dòng)化巡檢和清掃作業(yè)。為了達(dá)到最高的巡檢和清掃效率,需要對(duì)水冷壁的每個(gè)局部進(jìn)行處理。
因此,該文構(gòu)建一種全遍歷的路徑規(guī)劃方法。首先,對(duì)爬壁機(jī)器人的工作區(qū)域進(jìn)行柵格化處理,將全部工作區(qū)地圖劃分為柵格,這些柵格的信息是已知的先驗(yàn)信息。其次,該方法充分考慮水冷壁的非理想情況,即水冷壁各個(gè)區(qū)域并不都是完全光滑和可執(zhí)行作業(yè)的,這些區(qū)域稱為障礙區(qū)域。障礙區(qū)域的形狀和大小可能相同,也可能存在差異。從大小來(lái)看,有的障礙只占據(jù)1 個(gè)柵格,有的則占據(jù)多個(gè)柵格。這些障礙所在的區(qū)域是路徑規(guī)劃中機(jī)器人禁止通行的區(qū)域,爬壁機(jī)器人只能在沒(méi)有障礙的柵格區(qū)域進(jìn)行移動(dòng)和作業(yè)。該文提出的全遍歷路徑規(guī)劃方法示意如圖2所示。

圖2 該文提出的全遍歷路徑規(guī)劃方法示意情況
在圖2 中,假設(shè)爬壁機(jī)器人的巡檢和清掃區(qū)域是1 個(gè)48 柵格區(qū)域。其中,這個(gè)區(qū)域的橫向?qū)挾葹? 個(gè)柵格,縱向高度為6 個(gè)柵格。爬壁機(jī)器人從(左一,上一)的位置開(kāi)始進(jìn)入這一區(qū)域,按照全局遍歷的原則執(zhí)行路徑規(guī)劃。在該區(qū)域中,包括2 個(gè)障礙區(qū)域,一個(gè)是圓形障礙區(qū)域,占據(jù)4 個(gè)柵格;另一個(gè)是角形障礙區(qū)域,占據(jù)3 個(gè)柵格。爬壁機(jī)器人從起始位置開(kāi)始,在盡可能遍歷每個(gè)柵格的同時(shí),要躲避障礙柵格。其中,機(jī)器人不得不重復(fù)走過(guò)的柵格有2 個(gè):(右二,上二)的柵格和(右二,上一)的柵格。
通過(guò)上述分析可知,作業(yè)區(qū)域地圖信息的柵格化處理給爬壁機(jī)器人的路徑規(guī)劃創(chuàng)造了有利條件,但是在執(zhí)行路徑規(guī)劃的過(guò)程中,還必須要充分考慮遍歷作業(yè)需求的引力作用和障礙柵格的斥力作用。
首先,構(gòu)建遍歷作業(yè)需求下的引力場(chǎng)關(guān)系,如公式(2)所示。
式中:EY為遍歷作業(yè)需求及其柵格區(qū)域給爬壁機(jī)器人提供的引力場(chǎng);α為遍歷作業(yè)需求及其柵格區(qū)域給爬壁機(jī)器人提供的引力場(chǎng)系數(shù);g為爬壁機(jī)器人當(dāng)前位置對(duì)應(yīng)的柵格區(qū)域;go為爬壁機(jī)器人的目標(biāo)柵格區(qū)域;s(g,go)為爬壁機(jī)器人當(dāng)前位置柵格與目標(biāo)柵格間的距離;s0為爬壁機(jī)器人到目標(biāo)柵格的距離域值。
根據(jù)遍歷作業(yè)需求下的引力場(chǎng)關(guān)系可以進(jìn)一步計(jì)算爬壁機(jī)器人所受的引力,如公式(3)所示。
式中:FY為爬壁機(jī)器人所受的引力;α為遍歷作業(yè)需求及其柵格區(qū)域給爬壁機(jī)器人提供的引力場(chǎng)系數(shù);g為爬壁機(jī)器人當(dāng)前位置對(duì)應(yīng)的柵格區(qū)域;go為爬壁機(jī)器人的目標(biāo)柵格區(qū)域;s(g,go)為爬壁機(jī)器人當(dāng)前位置柵格與目標(biāo)柵格間的距離;so為爬壁機(jī)器人到目標(biāo)柵格的距離域值。
其次,構(gòu)建障礙所在柵格區(qū)域的斥力場(chǎng)關(guān)系,如公式(4)所示。
式中:EC為障礙所在柵格區(qū)域給爬壁機(jī)器人提供的斥力場(chǎng);β為障礙所在柵格區(qū)域給爬壁機(jī)器人提供的斥力場(chǎng)系數(shù);g為爬壁機(jī)器人當(dāng)前位置對(duì)應(yīng)的柵格區(qū)域;go為爬壁機(jī)器人的目標(biāo)柵格區(qū)域;s(g,go)為爬壁機(jī)器人當(dāng)前位置柵格與目標(biāo)柵格間的距離;s0為障礙作用的斥力范圍常數(shù)。
根據(jù)障礙所在柵格區(qū)域的斥力場(chǎng)關(guān)系可以進(jìn)一步計(jì)算爬壁機(jī)器人所受的斥力,如公式(5)所示。
式中:FC為障礙所在柵格區(qū)域給爬壁機(jī)器人提供的斥力;β為障礙所在柵格區(qū)域給爬壁機(jī)器人提供的斥力場(chǎng)系數(shù);g為爬壁機(jī)器人當(dāng)前位置對(duì)應(yīng)的柵格區(qū)域;go為爬壁機(jī)器人的目標(biāo)柵格區(qū)域;s(g,go)為爬壁機(jī)器人當(dāng)前位置柵格與目標(biāo)柵格間的距離;s0為障礙作用的斥力范圍常數(shù)。
3 爬壁機(jī)器人的全遍歷路徑規(guī)劃試驗(yàn)
為了驗(yàn)證該文提出的基于柵格和作用力場(chǎng)的全遍歷路徑規(guī)劃方法的有效性,接下來(lái)進(jìn)行試驗(yàn)研究。在試驗(yàn)過(guò)程中,以火電廠水冷壁為機(jī)器人的巡檢和清掃對(duì)象,以爬壁機(jī)器人為路徑規(guī)劃的實(shí)施主體,以水冷壁作業(yè)區(qū)域地圖信息為先驗(yàn)知識(shí)(包括障礙物的數(shù)量、形狀以及所占柵格區(qū)域的大小)。
以70 個(gè)柵格區(qū)域?yàn)榕辣跈C(jī)器人路徑規(guī)劃的執(zhí)行區(qū)域,區(qū)域水平方向的寬度為10 個(gè)柵格,區(qū)域垂直方向的寬度為7 個(gè)柵格。這里需要指出的是,為了滿足爬壁機(jī)器人運(yùn)動(dòng)學(xué)的需求,每個(gè)柵格的大小正好適合爬壁機(jī)器人的停放、轉(zhuǎn)動(dòng)。試驗(yàn)過(guò)程分為2 組路徑規(guī)劃,第一組是在沒(méi)有任何障礙物的情況下進(jìn)行路徑規(guī)劃,第二組是在小區(qū)域內(nèi)設(shè)置多障礙物的情況下進(jìn)行路徑規(guī)劃。第一組試驗(yàn)得到的爬壁機(jī)器人的路徑規(guī)劃結(jié)果如圖3 所示。

圖3 無(wú)障礙情況下爬壁機(jī)器人規(guī)劃出的路徑
由圖3 可知,因?yàn)檎麄€(gè)地圖區(qū)域內(nèi)沒(méi)有任何障礙物信息,所以爬壁機(jī)器人在該文提出的全遍歷路徑規(guī)劃方法下計(jì)算出了非常有規(guī)律的運(yùn)動(dòng)路徑:爬壁機(jī)器人從左下初始位置出發(fā),沿垂直向上的方向遍歷最大的柵格長(zhǎng)度→沿水平向右遍歷最大的柵格長(zhǎng)度→沿垂直向下的方向步進(jìn)1 個(gè)柵格長(zhǎng)度→沿水平向左遍歷最大的柵格長(zhǎng)度→沿垂直向下遍歷最大的柵格長(zhǎng)度→沿水平向右的方向步進(jìn)1 個(gè)柵格長(zhǎng)度……如此循環(huán)往復(fù),直到遍歷完地圖內(nèi)所有柵格。實(shí)際上,在圖3 給定的地圖上,爬壁機(jī)器人的運(yùn)動(dòng)路徑規(guī)劃可能不止1 種方案。如果在圖3 中的出發(fā)點(diǎn)爬壁機(jī)器人選擇先從水平方向向上行進(jìn),那么就可以形成全新的規(guī)劃策略和規(guī)劃方案。另外,在地圖最右側(cè)垂直方向上,現(xiàn)有的路徑規(guī)劃方案是執(zhí)行了1 個(gè)柵格的步進(jìn),這個(gè)行進(jìn)單位也可以設(shè)置為2 個(gè)柵格或其他形式。如果做出這樣的改動(dòng),那么后續(xù)的路徑規(guī)劃方案也都會(huì)改動(dòng)。需要指出的是,這里一直在尋求一種有規(guī)律的、有跡可循的路徑規(guī)劃方案。實(shí)際上,只要能滿足出發(fā)點(diǎn)到終點(diǎn)并遍歷地圖上所有的柵格,非規(guī)律的路徑規(guī)劃方案也是完全可行的。
第二組試驗(yàn)得到的爬壁機(jī)器人的路徑規(guī)劃結(jié)果如圖4所示。
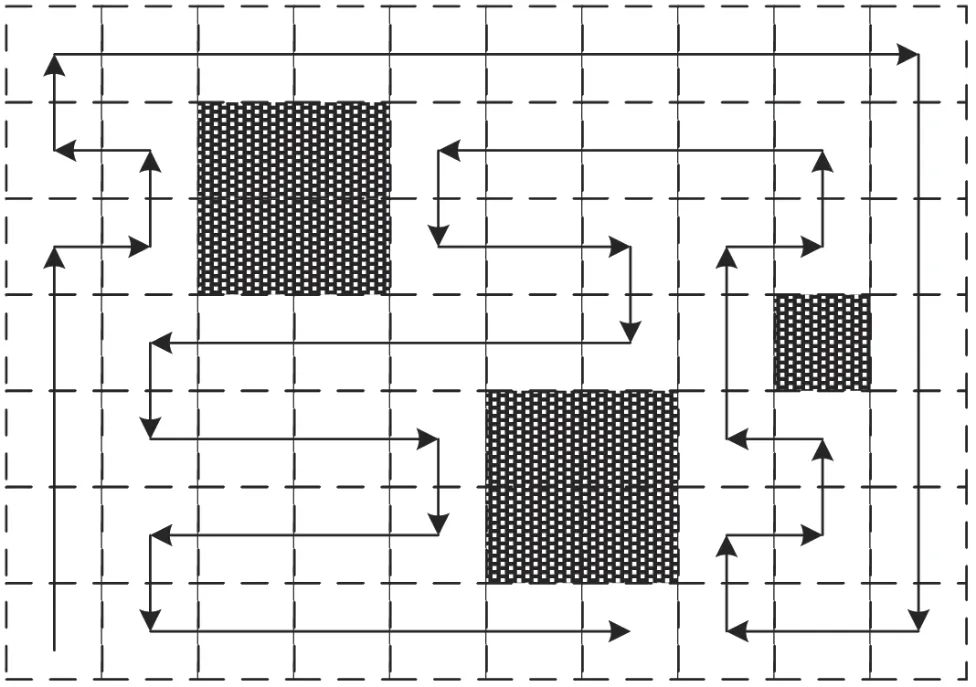
圖4 小區(qū)域多障礙情況下爬壁機(jī)器人規(guī)劃出的路徑
由圖4 可知,在70 個(gè)柵格區(qū)域內(nèi)存在3 個(gè)障礙物,并且其中2 個(gè)障礙物占據(jù)了4 個(gè)柵格區(qū)域。多障礙的存在給路徑規(guī)劃工作帶來(lái)了難度,但是爬壁機(jī)器人在該文提出的路徑規(guī)劃方法下,獲得了最佳路線方案,沒(méi)有任何重復(fù)運(yùn)行的柵格。從左下出發(fā)位置開(kāi)始,為了躲避左上障礙區(qū)域并遍歷完障礙左側(cè)的柵格,爬壁機(jī)器人沒(méi)有一次走完左側(cè)最大柵格長(zhǎng)度,而是走了一個(gè)“幾”字折線。在右上障礙和中下障礙的區(qū)域,爬壁機(jī)器人仍然走出了“幾”字折線。在3 個(gè)障礙合圍的右中上區(qū)域,爬壁機(jī)器人走出了多折線、多次折返的路徑,不僅成功躲避了障礙區(qū)域,而且還實(shí)現(xiàn)了遍歷所有非障礙區(qū)域柵格的目標(biāo),達(dá)到了最佳的效果。
4 結(jié)語(yǔ)
以人工進(jìn)行火電廠水冷壁的巡檢和清掃工作的方式具有效率低、安全隱患大等問(wèn)題。因此,該文用爬壁機(jī)器人自動(dòng)化巡檢作業(yè)代替人工巡檢和清掃,提出了全遍歷的路徑規(guī)劃方法。首先,對(duì)爬壁機(jī)器人作業(yè)時(shí)的運(yùn)動(dòng)學(xué)進(jìn)行分析。其次,以柵格法聯(lián)合作用力場(chǎng)法構(gòu)建了爬壁機(jī)器人的全遍歷路徑規(guī)劃方法。最后,通過(guò)2 組試驗(yàn)證明了所提出的路徑規(guī)劃方法對(duì)爬壁機(jī)器人自動(dòng)巡檢作業(yè)的有效性。對(duì)無(wú)障礙區(qū)域來(lái)說(shuō),該文提出的方法可以為爬壁機(jī)器人規(guī)劃有規(guī)律的行進(jìn)路徑;對(duì)多障礙區(qū)域來(lái)說(shuō),該文提出的方法可以為爬壁機(jī)器人找到最佳行進(jìn)路徑,不僅可以成功躲避所有障礙,而且還可以實(shí)現(xiàn)遍歷全部非障礙區(qū)域柵格的目標(biāo),為自動(dòng)化巡檢作業(yè)奠定了基礎(chǔ)。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30
