基于高階ESO的永磁直驅風電系統快速終端滑模控制
2023-02-13 07:04:52吳影,高林
電力系統及其自動化學報 2023年1期
吳 影,高 林
(青島科技大學自動化與電子工程學院,青島 266000)
風能被認為是一種可再生的能源形式,因為它是太陽能活動的結果。利用風力發電能夠妥善解決環境污染問題,節約化石燃料等不可再生能源,風力發電也逐漸成為我國發電領域的主力軍。但由于風速具有易變性,隨機性和不可預知等特點會使系統對風能的利用效率降低,如何最大程度地利用風能,降低風速變化對系統帶來的負面影響,提高系統的魯棒性,是研究風電系統最大功率跟蹤MPPT(maximum power point tracking)控制的意義[1-2]。
風電機組主要的控制策略切換在額定風速點,分為額定風速以下的定槳變速風能的最大追蹤運行和額定風速以上的變槳控制恒功率運行,本文主要的研究內容是額定風速以下的定槳變速風能的最大功率跟蹤運行。實現最大功率跟蹤的常用方法有反饋法,如最大功率曲線法[3]等,但實際中對機械功率的測量難以精確測量,使得控制精度降低。直驅式永磁同步發電系統中[4-5]永磁同步發電機轉子的磁極對數很大,可以直接與風力機的輪轂相連,取消了齒輪箱的增速機構,減少了齒輪箱維護費用,而且采用變速恒頻的風力發電技術[6-7]可以最大限度地提高對風能的轉換率。輪轂直接與發電機轉子連接,使風速變化給系統帶來的外界擾動直接作用在發電機的轉子上,增加了對發電機的控制難度。
鑒于此,越來越多的智能控制方法被應用在風力發電系統中,如:PI控制[8]、滑模變結構控制[9]、自適應控制[10]、自抗擾控制[11]等。但傳統PI控制對轉速的控制精度不高,易出現超調現象,很難消除外界擾動對系統帶來的負面影響。文獻[10]采用一種基于自適應模糊控制器和非線性擾動觀測器的反饋線性化控制方法。通過自適應律動態調整模糊規則,改善模糊控制器的學習能力,增強系統的魯棒性,但由于模糊控制所需參數眾多,計算比較復雜;文獻[11]利用非線性光滑函數代替非線性組合冪次函數,提出基于非線性擴張狀態觀測器的非線性抗擾控制方法,有效提高了系統的抗擾能力;文獻[12]在文獻[11]的基礎上,又設計了非線性滑模趨近律,將NLEAO與非線性滑模控制率相結合,消除了傳統滑模控制中的高頻抖振現象;文獻[13]設計了一種基于文獻雙曲正切的非線性跟蹤微分器,該微分器函數形式簡單,消除了輸出抖振問題,但時變參數難以整定;文獻[14]提出一種基于自適應觀測器的滑模控制方法,通過自適應觀測器估計發電機電動勢和負載轉矩,提高系統的響應速度,但在風速隨機發生變化時,此方法對發電機轉速的控制精度有所下降。
因此,針對系統的輸入轉矩受外界風速多變影響導致轉速控制精度下降的問題,本文引入高階擴張狀態觀測器HOESO(high-order extended state observer),利用擾動先驗知識快速精確估計出系統的轉矩和轉速,比傳統ESO的估計效果更佳。滑模控制算法具有響應速度快、魯棒性強等特點,本文設計快速終端滑模控制器以HOESO的輸出轉速和轉矩為輸入信號,實時補償掉由風速變化引起發電機轉矩突變帶來的影響,提高系統的轉速響應能力,實現最大功率跟蹤。本文將此方法應用在風電系統模型中,分別觀察陣風、漸變風、隨機風3種不同風速下發電機轉速和轉矩的跟蹤效果,仿真結果表明基于高階擴張狀態觀測器的快速終端滑模復合控制方法,不僅實現轉速的無超調快速響應,而且控制精度高,系統魯棒性強。
1 永磁直驅風力發電系統的數學模型
風力機獲取風能后將其轉化為機械能,通過轉矩的形式輸送到發電機并發出交流電,不完全穩定的交流通過機側變流器整流為幅值穩定的直流電,直流電經網側逆變器逆變成與電網幅值和頻率一致的交流電,使機械能轉化為電能輸送到電網。本文主要研究發電機機側變流器得轉速外環控制部分,永磁直驅風力發電系統的基本結構如圖1所示。
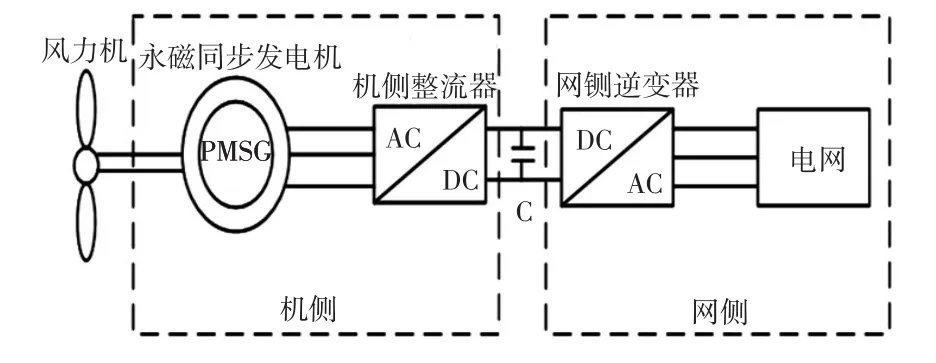
圖1 永磁直驅風力發電系統基本結構Fig.1 Basic structure of permanent magnet direct-drive wind power generation system
1.1 風力機的數學模型
氣流使葉片運動起來,將風能轉化為機械能。由Betz風能理論可知,風力機轉化的機械功率Pm可表示為

式中:ρ為空氣密度,kg/m3;v為風速,m/s;r為風力機葉片的半徑,m;Cp(λ,β)為風能利用系數;β為槳距角,(°);λ為葉尖速比,可以表示為

式中,ωm為風力機的角速度,rad/s,由風速決定。
由式(1)可知風能利用系數由葉尖速比λ和槳距角β決定,可表示為
Cp(λ,β)的曲線如圖2所示。由圖2可知,當槳距角一定時,Cp(λ,β)隨著λ的變化而變化,且存在一個最佳葉尖速比λopt使Cp(λ,β)達到最大值。由此可知,額定風速下最大功率跟蹤是當風速發生變化時,通過調節轉速,使風力機在不同風速下都能始終運行在最大風能利用系數點處,從而輸出最大功率。因此如何控制系統的轉速是研究風電系統最大功率跟蹤控制的核心。
圖2 風能系數曲線Fig.2 Curve of wind energy coefficient
風力機的氣動轉矩Tm與其捕獲的機械功率滿足

結合式(1)、式(2)和式(4)可得Tm為

1.2 PMSG的數學模型
隱極式永磁同步發電機d軸和q軸定子電感相等,在d-q旋轉坐標軸下建立其數學模型,即
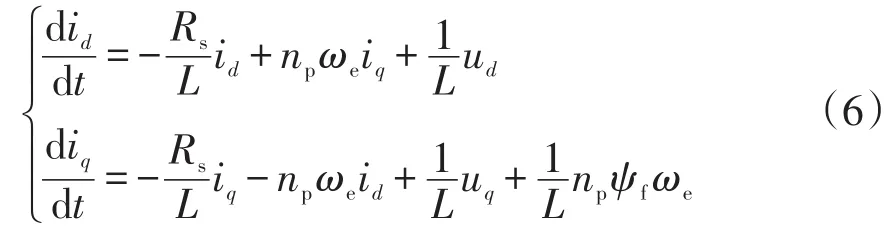
式中:id為d軸定子電流分量;iq為q軸定子電流分量;ud、uq分別為d軸和q軸的定子電壓分量;Rs為發電機電樞電阻;L為定子電感;np為轉子磁極對數;ψf為永磁體的磁鏈;ωe為發電子轉子的轉速。
發電機電磁轉矩的表達式為

由式(7)可知,發電機的電磁轉矩由iq決定。
永磁同步發電機不需要通過齒輪箱增速,風機通過傳動鏈直接與發電機轉子相連,所以ωe=ωm。則發電機傳動系統處的機械運動方程為

式中:J為發電機轉動慣量;B為傳動系統產生的摩擦系數。
2 快速終端滑模控制器
傳統PI控制無法解決風電系統的非線性問題,因此本文設計快速終端滑模控制器,使轉速外環的控制性能更加優越。
快速終端滑模控制器的設計如下。
設系統的狀態變量為

系統的轉速誤差方程為

由式(10)可得

由式(8)可得

設計滑模面為

式中:α>0,β>0,0<γ<1。關于參數α、β和γ的選擇方法詳見文獻[15]。
則有

設滑模趨近率為

式中:k>0,0<α<1。關于參數k和α的選擇方法詳見文獻[16]。
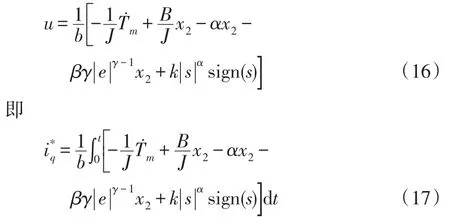
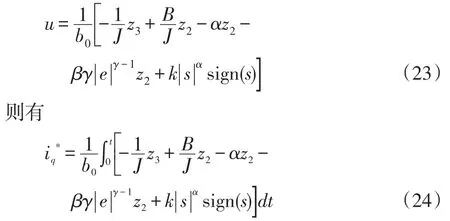
由式(14)和式(15)可得控制律為
3 高階擴張狀態觀測器
上文中提到將滑模控制應用在發電機的轉速外環,忽略風力機的氣動轉矩對系統帶來的未知擾動,本文引入高階擴張狀態觀測器來對氣動轉矩進行精確估計,提高系統的魯棒性。
高階擴張狀態觀測器的設計如下。
令y=x1為系統的輸出,則式(12)可表示為

設系統所受擾動為f(·),可表示為

式中,b0為b的近似值。
擾動f(·)即系統所受的非線性摩擦力,內部參數變化,外界風速的不可控性給系統帶來的擾動。當系統趨于穩定時,x2≈0,b0-b≈0,系統僅受外界干擾的影響。

式中:n>0,m>0。關于參數n和m的選擇方法詳見文獻[17]。
定義系統的狀態變量x3=f(·),,。重新對系統進行構造,得
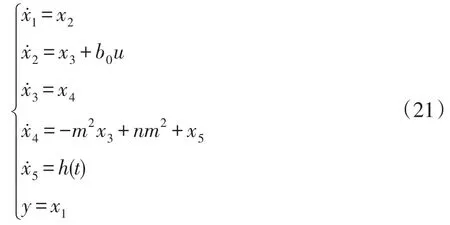
當系統進入穩態后,h(t)趨近于0。針對重構后的系統設計高階ESO為
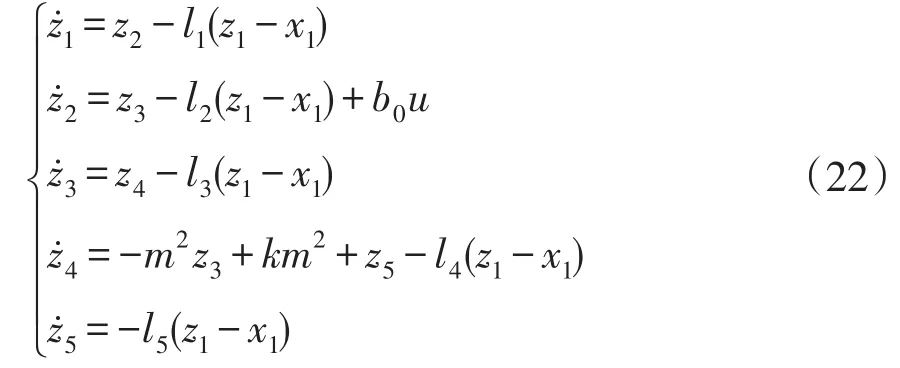
式中:l1、l2、l3、l4、l5為觀測器誤差增益參數,由觀測器的帶寬決定;z1~z5分別為x1~x5的觀測值。
直驅式永磁同步風電系統是一個干擾性強的非線性系統,當系統受到隨時間變化的外部擾動時,傳統的擴張狀態觀測器不能準確觀測出系統的轉矩和轉速。所以本文對系統進行重構,設計了高階擴張觀測器,在外界風速發生變化時,能夠精確估計系統的實時轉矩,實現系統轉速在不同風速下都可以快速準確地跟蹤上最佳轉速,且不會降低系統的動態性能。
4 基于HOESO的快速終端滑模控制
4.1 復合控制的設計
結合廣義擴張狀態觀測器,用觀測器得出的估計值代替x1、x2、x3,則式(16)可寫為
系統控制結構如圖3所示。
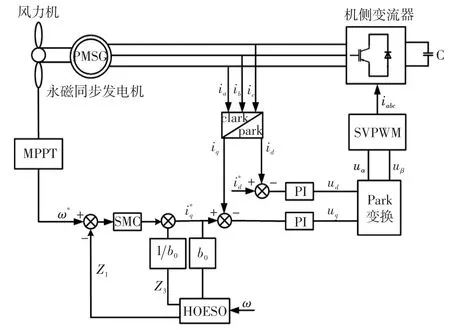
圖3 控制結構Fig.3 Control structure
4.2 控制器穩定性分析
選取Lyapunov函數為

將式(23)代入式(14),得
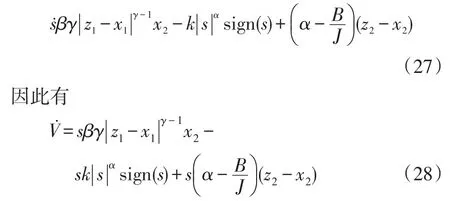
令|z1-x1|≤a1,(z2-x2)≤a2,其中a1、a2是常數,則

由式(29)可知,當s≠0時,滿足不等式

則=≤0 ;當s=0 時,==0。
5 仿真結果與分析
為驗證本文所提控制方法的有效性,在MATLAB-Simulink仿真軟件中建立風電系統模型,將本文設計的復合控制器應用到模型里,將自然界中的風速拆分為陣風、漸變風、自然風3種風速,并觀察3種風速分別作用下的轉速跟蹤和轉矩跟蹤情況,并對比傳統PI和滑模控制進行研究分析,風力發電系統主要的仿真參數如表1所示。
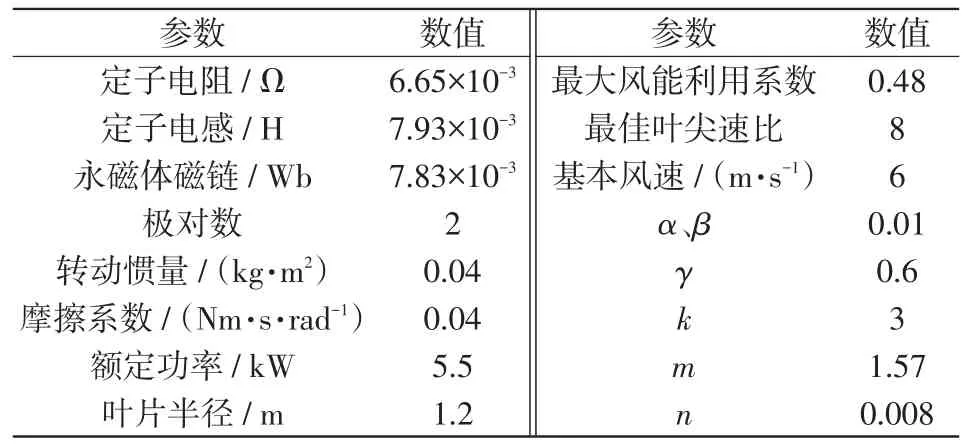
表1 風力發電系統主要參數Tab.1 Main parameters of wind power generation system
5.1 陣風仿真分析
陣風用來表達外界風速突然發生變化的情況,其數學模型為
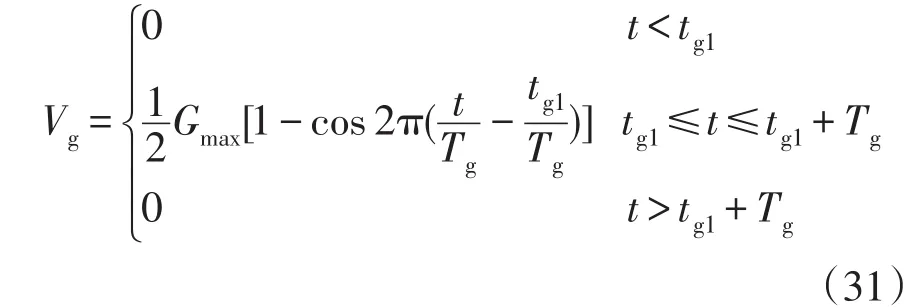
式中:t為時間;tg1為陣風開始時刻;tg1+Tg為陣風結束時刻,Tg為陣風周期;Gmax為陣風峰值。本文的參數取值為:Gmax=8 m/s,tg1=1 s,Tg=4 s。
陣風作用時系統的轉速跟蹤結果如圖4所示。

圖4 陣風作用下發電機轉速跟蹤曲線Fig.4 Generator speed tracking curve under the effect of gusty wind
由圖4可知,在陣風開始作用時(即1 s<t<5 s時),對比PI控制器和基于傳統ESO的滑模控制器結合這兩種控制算法,本文采用的SMC與HOESO結合的控制方法可以完全跟蹤到系統給定的最佳轉速ω*,且調節時間更短,控制精度更高。
5.2 漸變風仿真分析
漸變風用來表達風速逐漸變化的情況,其數學模型為
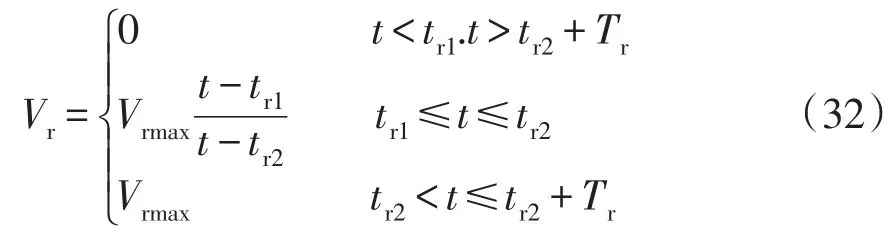
式中:Tr為漸變風存在的時間;tr1為漸變風開始時刻;tr2為漸變風結束時刻;Vrmax為漸變風峰值。本文的參數取值為:tr1=1s,tr2=3s,Tr=2s,Vrmax=8m/s。
漸變風作用時系統的轉速跟蹤曲線如圖5所示。
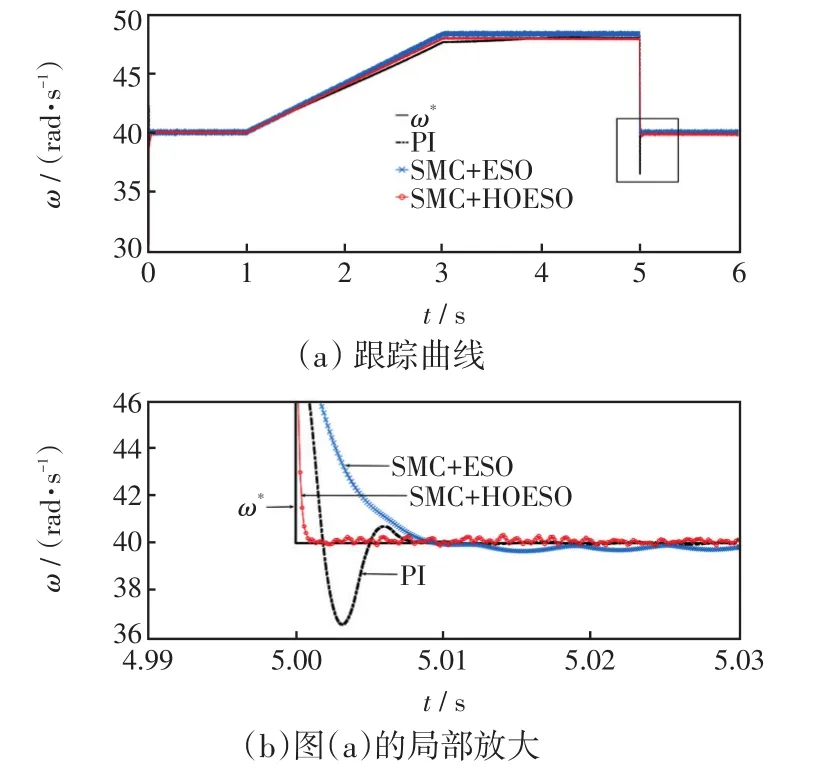
圖5 漸變風作用下發電機轉速跟蹤曲線Fig.5 Generator speed tracking curve under the effect of gradual wind
由圖5可知,當風速緩慢變化時(1 s<t<3 s),本文設計的復合控制器比其他兩種控制器對轉速的控制性能更優秀;當風速在第5 s突然下降時,PI控制器對轉速的控制有明顯超調,基于傳統ESO的滑模控制器對轉速的響應時間超過0.01 s。本文提出的控制器可以控制轉速在0.01 s內響應,調節速度快,能實現完全無超調。
5.3 隨機風速仿真分析
本文用隨機噪聲風速來模擬隨機風,表達風速高度變化的特性,其數學模型為
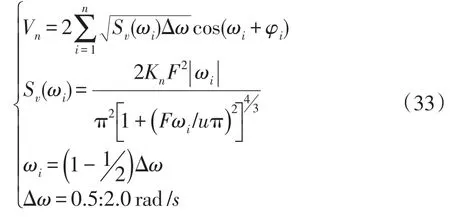
式中:Sv(ωi)為譜密度函數;ωi為第i個分量的角頻率;Δω為隨機分量的離散間距;φi為隨機變量,均勻分布在[0 ,2π];Kn為地表粗糙系數;F為擾動區間,m2;u為平均風速,m2/s;本文的參數取值為:Kn=0.004,F=2 000m2,n=50。
隨機風作用時系統的轉速跟蹤曲線如圖6所示。
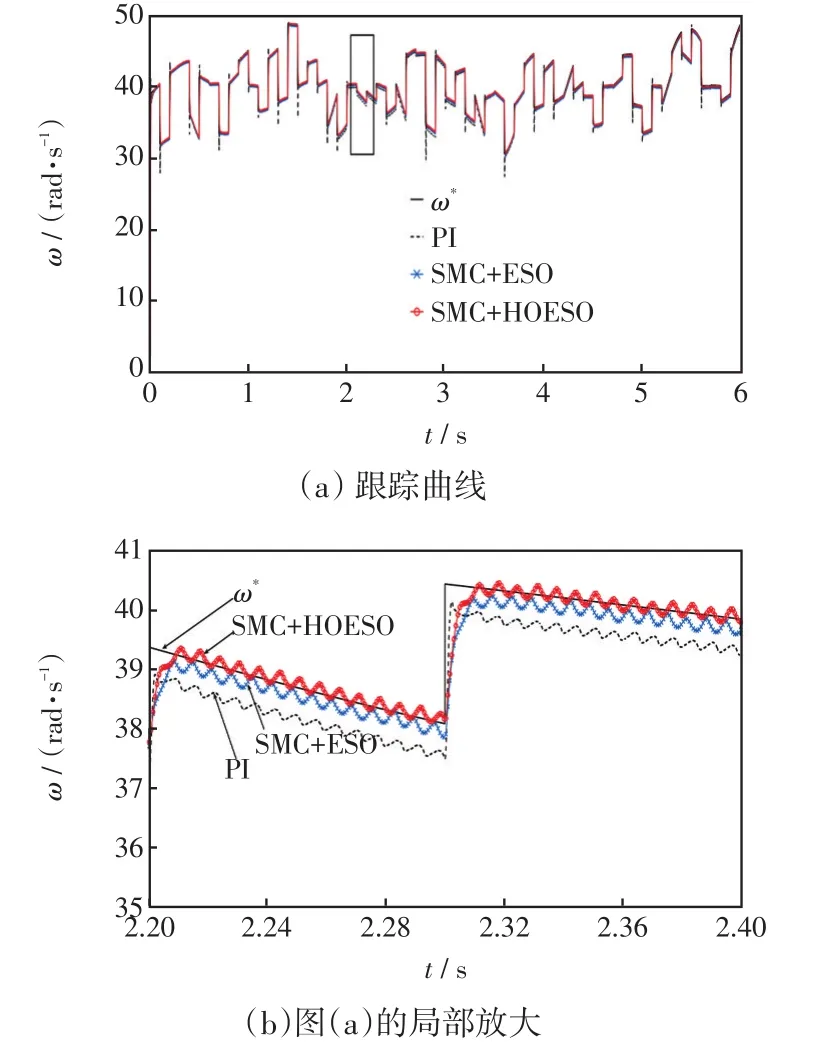
圖6 隨機風作用下發電機轉速跟蹤曲線Fig.6 Generator speed tracking curve under the effect of random wind
由圖6可知,當風速隨機變化時,PI控制器對轉速的控制存在大約0.5 rad/s的誤差,基于傳統ESO的滑模控制器存在大約0.2 rad/s的誤差,但本文設計的復合控制器能夠快速精準跟蹤系統的最佳轉速。
由以上轉速跟蹤仿真結果表明,不管何種風速下,本文提出的復合控制方法效果都比其他兩種控制器的效果更佳,該復合控制器可以實現完全無超調,對轉速的控制更準確。
圖7~圖9是3種不同風速作用下的擾動誤差觀測曲線,從圖9可以看出本文所設計的高階ESO對系統轉矩的響應時間在0.02 s內,且觀測誤差基本穩定在0,傳統ESO的響應時間在0.06 s左右,且觀測誤差大,所以HOESO對轉矩的跟蹤性能比ESO的更好,受風速變化的影響更小。
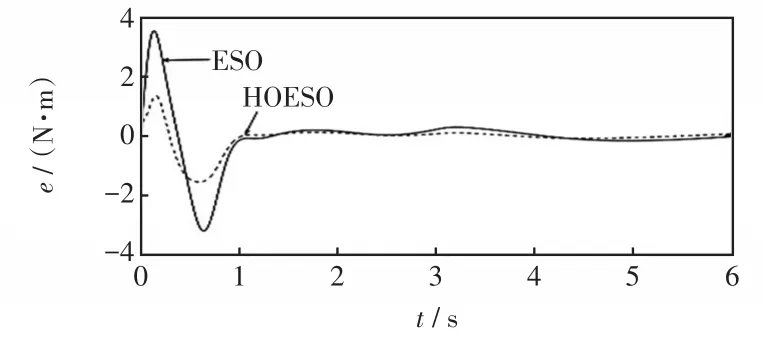
圖7 陣風作用下的擾動誤差曲線Fig.7 Disturbance error curve under the effect of gusty wind
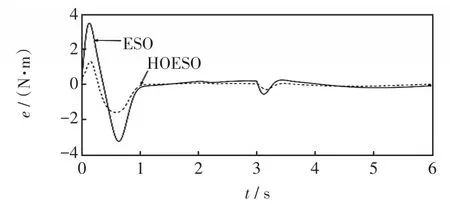
圖8 漸變風作用下的擾動誤差曲線Fig.8 Disturbance error curve under the effect of gradual wind
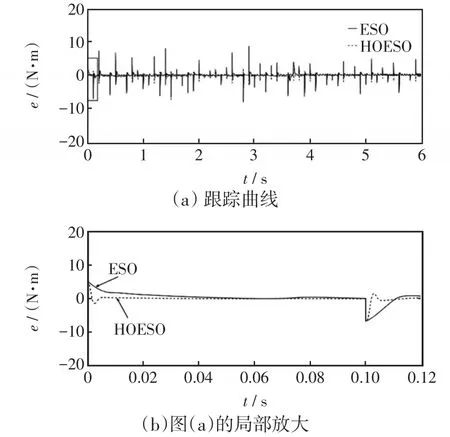
圖9 隨機風作用下擾動誤差曲線Fig.9 Disturbance error curve under the effect of random wind
綜上所述:對比傳統PI控制和基于傳統ESO的滑模控制,基于高階擴張觀測器的滑模控制器具備動態性能好,控制精度高,魯棒性強的優勢。
6 結語
本文在研究永磁直驅風力發電系統的最大功率跟蹤的基礎上,針對外部擾動的不確定性,提出了一種基于高階擴張狀態觀測器的快速終端滑模復合控制方法。首先設計高階擴張狀態觀測器,在風速易變的情況下,實現對系統轉速和轉速的準確估計,增強系統的穩定性,然后采用擾動補償技術,前饋到快速終端滑模控制器中進行補償,提高系統的響應速度。仿真結果表明,將高階擴張狀態觀測器應用在風電系統的轉速外環控制中,對系統的轉矩和轉速進行精確估計和主動補償,提高系統的動態性能。尤其在風速突然發生變化時,對比傳統PI和滑模控制方法,對轉速的控制精度更高,受風速突變的影響更小。綜上所述,無論風速如何變化,本文設計的復合控制方法,都可以使系統的轉速快速響應,控制精度高,增強風力發電系統的魯棒性,實現最大功率跟蹤,提高發電效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31