基于子圖同構的電力系統故障建模方法
2023-02-13 07:04:50劉佳鈺龔正宇梁曉斌張宇棟
電力系統及其自動化學報 2023年1期
李 鑫,劉佳鈺,龔正宇,梁曉斌,湯 凡,張宇棟
(國家電網有限公司西南分部,成都 610041)
電力系統故障建模是利用電力系統仿真數據模擬系統常見故障以及故障后繼電保護裝置動作的數據工作。故障建模是構筑電力系統在線安全分析所依賴的故障集合的基礎[1]。準確而全面地故障建模,能夠提高離線電網計算分析的效率,更加客觀科學地指導電網安全穩定運行[2]。
隨著“碳達峰,碳中和”行動方案的提出[3]以及“雙高”電網形態的不斷演化[4],相比于傳統電力系統,新型電力系統仿真面臨著元件數量、控制目標規模、故障形態與仿真場景復雜度加速上漲的趨勢,這將極大地挑戰電力系統在線及離線安全分析水平,其中故障建模又是影響電力系統安全性最直接的因素。當前電力生產中,故障建模主要由人工完成,存在如下局限性:
(1)在線安全分析中,故障集合無法根據系統日常檢修等臨時運行方式實時狀態進行調整,容易誤判電力系統安全狀態,影響電網運行的安全性或經濟性;
(2)電力系統諸多投退、改造等工程導致故障需要建模;
(3)涉及多個電網元件以及多套自動裝置動作邏輯的復雜故障(如開關拒動等連鎖故障),故障建模繁瑣極易出錯。
電力系統故障建模相關方法研究目前較少,原理主要分為2類:一類是半自動化方法,主要原理是對數據格式進行轉換[5];另一類研究基于圖計算的故障建模方法,構建了一個基于圖計算的故障建模統一架構[6],算法效率極高,但缺點是需要針對每一類故障的數據結構特點進行獨立算法開發,對特定仿真平臺與數據管理習慣比較依賴,很難直接將已有的算法推廣到其他仿真平臺或有不同數據建模習慣的地區。
不同的仿真工具對電力系統有著不同的數據存儲習慣,但其數據結構的本質是圖,圖論相關方法作為一種成熟的理論適合處理與電力系統網絡拓撲有關的問題。電力網絡作為一種重要的復雜網絡得到充分的研究[7-10],揭示了其“小世界”[7]且節點的度有冪率特征[8],以及電力網絡對無法承受針對關鍵節點的惡意攻擊,但對于一般性的隨機攻擊具有一定的承受能力[9-10]的重要性質;以上研究著重于對網絡一般性質的探索。而就網絡結構本身方面,圖論在電網斷面分析[11-12]與挖掘[13]方面有比較成熟的應用;圖論相關算法針對網絡分區[14-15]、保護配合[16]、故障定位[17]及重構恢復[18-19]均有一些積極嘗試。
作為圖論應用[20]的一個重要方向,大量的計算機視覺、人工合成同構分子方面的應用需求促使了以VF3算法為代表的子圖同構算法研究[21-23]不斷推進。子圖同構是在目標圖(模式)中搜索給定子圖(模式)的算法。本文基于圖論相關概念[20]以及子圖同構算法[21-23],對電力系統故障建模問題進行了研究。首先提出了電力系統故障建模問題的數學表達,然后結合電力系統網絡節點類型分布特點與節點語意信息,提出了基于子圖同構的電力系統故障建模方法。最后通過一個規模較大的區域電網算例對本文方法進行了應用。
1 電力系統故障模型分析
1.1 圖論基礎
一個簡單無向圖G由節點集合V以及節點之間連接的邊的集合E組成,記作

式中:V為圖G所有的節點組成的集合;E?V×V為圖G所有的邊組成的集合,運算符號“×”表示集合的笛卡爾乘積運算。
d(v,G)表示節點v在圖G中的度,即節點v鄰居節點的數量,表示為

式中:nei(v,G)表示節點v的鄰居節點集合,nei(v,G)={u|u∈V,(u,v)∈E};運算符號“ ||”表示集合中元素的個數。
定義節點類型函數σ:V→C表示集合V中每個節點的類型ci∈C={c1,c2,…,cq},即

式中,q為節點類型的數量。
A(G)表示圖G的鄰接矩陣,即

子圖同構定義:給定2個簡單無向圖Gf=(Vf,Ef)與G0=(V0,E0),如果存在一個單射函數λv:Vf→V0,滿足條件
則稱Gf與G0子圖同構。由于Gf與G0均是簡單圖,在節點映射λv下,必然存在對應邊的單射關系λe:Ef→E0,即

在節點映射λv下,定義節點對映射集合M?Vf×V0以及邊對映射集合N?Ef×E0,表示為

如果Gf與G0子圖同構,那么可以推斷Gf的任意子圖也與G0子圖同構。
定義集合M1為集合M中節點對的第1個節點的集合,定義集合M2為集合M中節點對的第2個節點的集合,即

同理可以定義集合Ni為

節點對映射集合M可以用大小為|Vf|×|V0|的0-1矩陣TM來表示,稱為節點轉移矩陣。TM的第i行j列元素mij=1表示Vf中的第i個節點與V0中的第j個節點構成一對節點對。
同樣可以定義大小為|Ef|×|E0|的0-1矩陣TN來表示邊對映射集合N,稱為邊轉移矩陣。TN第i行j列元素nij=1表示Ef中的第i個節點與E0中的第j個節點構成一對邊對。
同構子圖定義:滿足式(5)關系的映射λv、λe的節點與邊的最小集合,形成的圖,稱為Gf在G0中的同構子圖,記作,顯然有

1.2 電力系統故障模型
電力系統故障可以抽象為簡單無向圖Gf上所發生的一系列動作,稱Gf為故障網絡。每類故障發展路徑、故障動作時序都有所差異。定義網絡模式函數α(Gf)、事件集合Kf以及事件模式函數β(Ef)分別刻畫故障發展路徑、故障過程中發生的事件的集合以及事件與邊的映射關系。
1.2.1 網絡模式

其中diag[]表示對角矩陣。
具有相同網絡模式函數的兩圖一定是滿足式(5)的同構子圖,即

1.2.2 事件集合
定義事件集合Kf為故障發生過程中Ef上發生動作、位置與時間組合的集合,即

式中:ki為某條邊上發生的事件;ai為故障發生的動作;li為ai發生點所在邊的位置;ti為ai發生的時間。
例如ki=(單相斷開,5%,1.05)表示1.05 s在某邊5%的位置單相斷開。
1.2.3 事件模式
定義事件模式函數β(Ef)≡[βij]|Ef|×|Kf|為大小|Ef|×|Kf|的0-1矩陣,表示集合Ef與故障Kf的映射,即

式中:Ef[i]為Ef的第i條邊;Kf[j]為Kf的第j個事件。
例如,如果在β(Ef)的第i行中有βix=1,βiy=1,其余全為0,表示Ef中第i條邊會發生Kf的第x個和第y個事件。
至此,完成了電力系統故障模型的數學描述,某一類型的電力系統故障的所有信息可以通過α(Gf)、Kf、β(Ef)三元素完整描述。
1.3 電力系統故障建模數學表達
電力系統構成的圖記為G0=(V0,E0),稱為目標網絡。故障網絡Gf對應的網絡模式矩陣為,事件集合Kf,對應的事件模式矩陣為β(Ef)。
2 基于子圖同構的電力系統故障建模方法
2.1 故障建模算法推導
每個滿足式(15)條件的節點轉移矩陣TM就確定了1個Gf到G0的子圖同構關系,定義矩陣P為

當式(15)等價于條件

2.2 算法狀態空間及約束
算法的最終目的遍歷所有滿足條件的矩陣TM。由于同構子圖的任意子圖都能在目標圖中找到同構的關系。大部分高效的同構算法都選取深度優先的回溯算法[23],并在分支過程中盡量剪枝,避免大規模的組合搜索,以提升算法效率。以下分別介紹算法的狀態空間以及狀態約束。
2.2.1 狀態空間
定義si(i=0,1,…,|Vf|)為搜索狀態,i為當前狀態在搜索樹中的深度。si表示已經在G0中為Gf中的前i個節點找到配對節點,也就是Gf中的前i個節點及其節點之間的邊構成的圖與G0子圖同構。Gf中的前i個節點的集合定義為M1(si),G0中對應匹配的i個節點的集合定義為M2(si),狀態si對應的節點轉移矩陣TM(si)表示Gf中的前i個節點與G0所有節點的映射關系。
s0=?,TM(s0)=1。當搜索深度i達到Gf節點數|Vf|時,就得到了1個候選矩陣TM;當搜索深度i未達到|Vf|時,選擇Gf第i+1個節點u與G0尚未選擇過的1個節點v,形成節點對(u,v),構造下一個狀態si+1。
2.2.2 狀態約束
狀態由si轉化至si+1時,假設新加入的節點對為(u,v),TM(si+1)相當于在TM(si)基礎上增加一行單位向量εz,其中z是新加入的節點v在V0中的位置,即V0的第z個節點,即

通過式(16)計算P(si+1),判斷P(si+1)是否滿足式(17)條件。滿足則稱狀態si+1是一致狀態,繼續搜索;否則稱狀態si+1是非一致狀態,停止該分支上的搜索程序。式(17)的條件進一步推導得到Rule0、Rule1和Rule2三層約束如下。
Rule0:拓撲約束與節點類型約束。拓撲約束表示節點u在Gf中的度不能大于節點v在G0中的度,節點類型約束表示與節點u配對的節點v必須有相同的類型。此約束條件可以作為搜索狀態si+1中節點v的搜索范圍Ni+1,在程序初始化時進行計算為

Rule1:待選節點不能與已選節點相同,即

Rule2:新加入的節點對(u,v),對于新狀態si+1則有
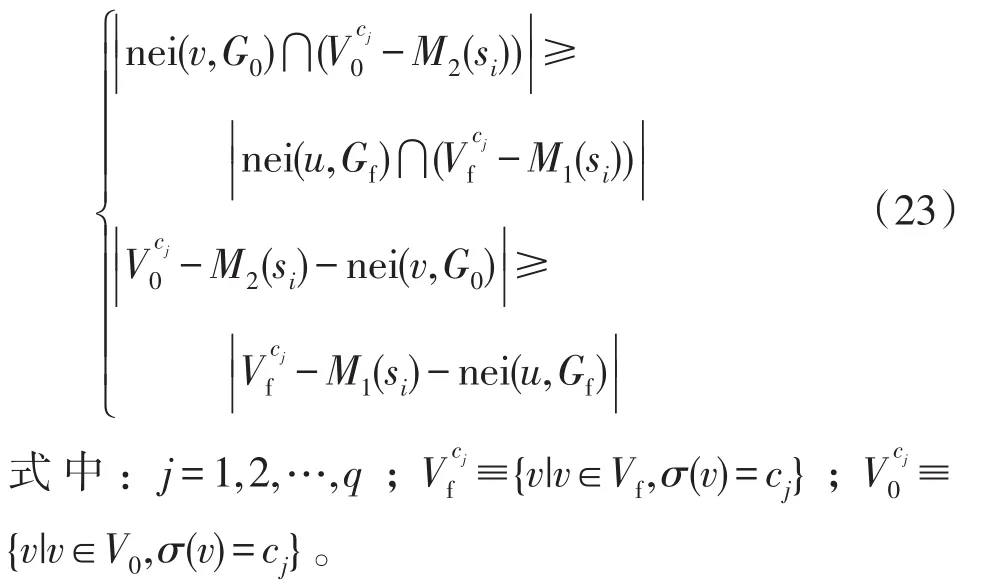
由于si是一致狀態,即矩陣P(si)滿足式(17)的約束,且由于式(19)節點v的搜索范圍Ni+1的限制保證能夠滿足式式(17)中第2式的約束,因此狀態si+1是否是一致狀態,等價于矩陣F滿足條件

除此之外,對于新加入的節點對(u,v),v與V0中尚未選擇的節點的關系應該能夠包含u與Vf中尚未選擇的節點的關系[23]。在故障建模中,假設圖Gf的所有的節點類型為式(3)表示的q類節點,約束Rule3可以表示為
2.3 考慮電力系統網絡特征的優化
為了模擬電力系統中發生的各類故障,不同的電力系統仿真軟件的數據組織形式不同。例如在電力系統綜合穩定程序(PSASP)中,為了模擬帶高抗的線路,設計了高抗節點;為了模擬500 kV廠站3/2接線的配串信息,設計了分支節點。圖1表示了1個包含3個變電站的局部電網中在PSASP中的可視化數據結構。甲變電站包含主節點“甲50”、分支節點“甲51”、“甲52”、“甲53”、“甲54”,同時還具有1個高抗節點“甲丙1”。數據結構包含實體邊和虛擬邊兩種類型的邊。該局部電網共有3條實體邊:“甲丙1-丙 53”、“甲53-丙51”以及“甲 54-乙51”以及8條虛擬邊,虛擬邊僅表示站內母線分串等結構信息。
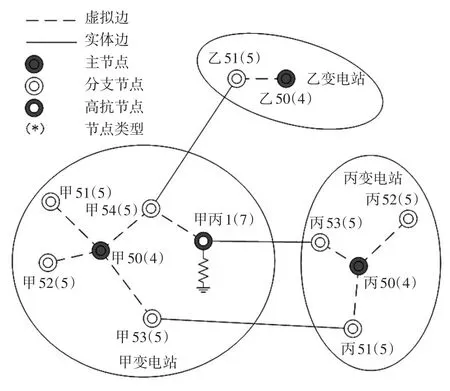
圖1 典型PSASP仿真軟件下的電網數據結構Fig.1 Typical data structure of power grid in simulation software PSASP
電力系統計算網絡的特點是節點類型上來說,大多數為分支節點,少數為高抗節點、串補節點、串抗節點,主節點處于中間數量。圖1中分支節點數量最多為8個,其次是主節點3個,最少的是高抗節點數量為1。
回溯算法的加速方式主要是剪枝操作。由于算法中需要逐個加入Gf中的節點,因此故障網絡的搜索順序十分關鍵。因此需要在算法中加入全網節點類型分布分析,優先在搜索樹中選擇類型數量分布較少的節點,能夠有效減少每一級分支數量。
在確定Gf中的節點搜索順序之后,還需要充分利用故障網絡Gf已有信息,在搜索過程中盡早去掉非一致狀態。在實際電力系統仿真實踐中,基于調度命名的仿真數據節點名稱本身就蘊含了部分網絡拓撲信息。電力系統計算網絡節點語意是通過對節點命名分析得到的特征文本,記作τ:V→H表示集合V中每個節點的特征文本hi∈H,即

式中,d為節點特征文本的個數。
在狀態si下,定義M1(si)中節點的語意集合H1(si)與M2(si)中節點的語意集合H2(si)分別為

針對Gf搜索順序第i+1級的節點u,需要尋找其語意父節點u',即

Rule4:一致狀態si,加入的節點對(u,v)仍保持一致狀態,節點v需要滿足約束

在搜索同構子圖過程中考慮節點語意意味著能夠縮小選擇的范圍,極大提高搜索效率。式(26)語意分析過程能夠在確定Gf節點順序之后,搜索開始之前進行預處理。綜上,基于子圖同構的電力系統故障建模方法流程如圖2所示。
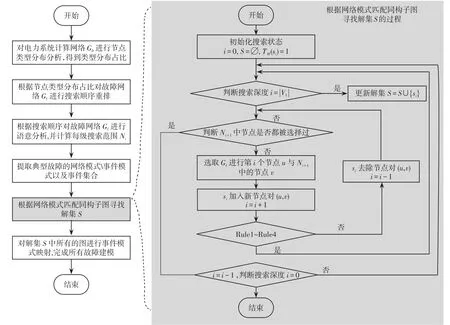
圖2 基于子圖同構的電力系統故障建模方法流程Fig.2 Flow chart of power system fault modeling method based on subgraph isomorphism
3 算例分析
3.1 局部電網算例
以圖1所示的局部電網計算網絡為例,發生在典型不帶高抗線路“甲54-乙51”上的N-1故障,在建模中體現為1.0 s時“甲54-乙51”線路在2%處三相接地短路,“甲54-乙51”線路兩側斷路器分別在1.09 s和1.1 s,跳開以隔離短路故障。在PSASP中不帶高抗線路的兩側斷路器位置一般設置在線路的1%、99%處。整個短路時序及位置如圖3所示。整個N-1故障的物理過程以及建模體現形式如表1所示。此故障屬于不帶高抗的線路發生的N-1故障,應用本文算法挖掘該局部網絡中所有與此類故障形式相似的故障。
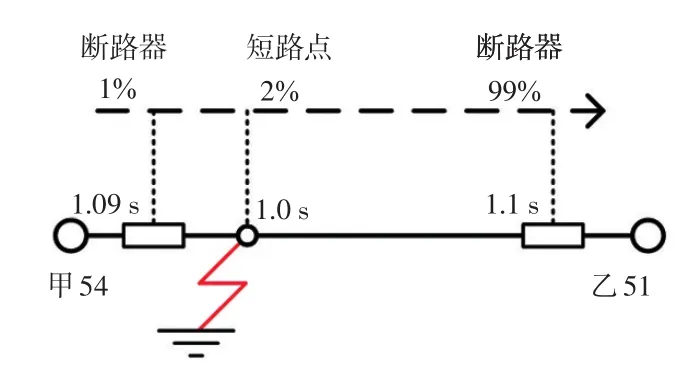
圖3 不帶高抗線路N-1故障在PSASP軟件中的設置Fig.3 Configuration of typical N-1 contingency in software PSASP
局部電網G0的節點集合V0={甲50,甲51,甲52,甲53,甲54,甲丙1,乙50,乙51,丙50,丙51,丙52,丙53},邊集合E0={(甲50-甲51),(甲50-甲52),(甲 50-甲 53),(甲 50-甲 54),(甲 54-乙 51),(甲 54-甲丙1),(甲丙 1-丙 53),(甲 53-丙51),(乙50-乙 51),(丙 50-丙 51),(丙50-丙 52),(丙 50-丙53)}。
該故障形成的圖Gf的節點集合Vf={甲54,乙51},邊集合Ef={(甲54-乙51)}。該故障的網絡模式,事件集合以及事件模式如表1所示。
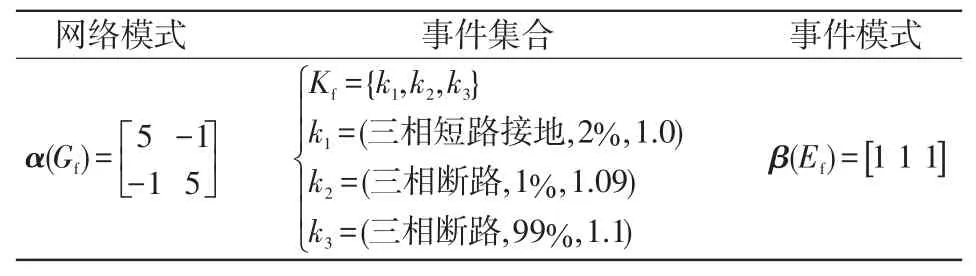
表1 不帶高抗線路N-1故障的網絡模式、事件集合和事件模式Tab.1 Network pattern,event set and event pattern under typical N-1 contingency
對于G0有
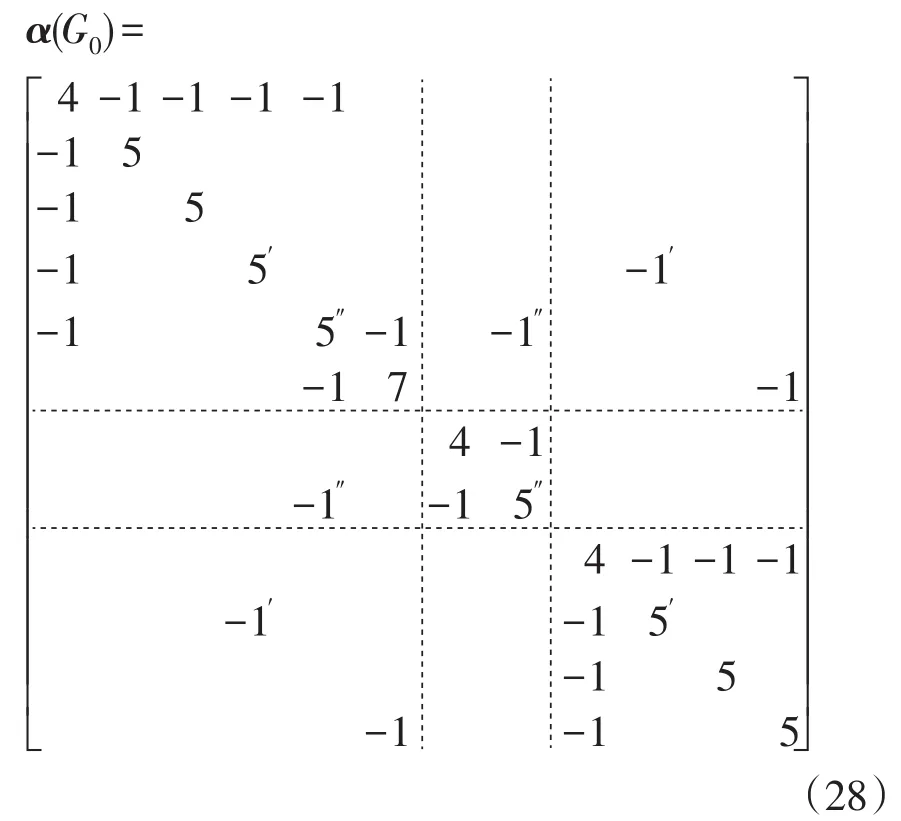
顯然,式(28)中帶單撇“'”標記的4元素與帶兩撇“″”標記的4元素組成的2個2×2矩陣與表2中的α(Gf)均滿足式(17)的條件,這2個滿足條件的節點轉移矩陣分別為

式(29)中2個節點轉移矩陣代表了2個與Gf相同的結構即:(甲53、丙51)、(甲54、乙51)。再利用β(Ef)與Kf進行故障時序的分配可以得到該局部電網中2個與Gf同類故障,即線路“甲53-丙51”N-1故障與“甲54-乙51”N-1故障。
3.2 區域電網算例
選取國內某較大規模的500 kV區域電網在PSASP中對應的計算網絡G0,該網絡有703個計算節點,818條計算邊。下文算法運行的硬件環境為CPU:Intel(R)Core(TM)i7-6700HQ,主頻 2.60 GHz,內存8 GB。操作系統為Windows 10-20H2。
3.2.1 算法效率分析
1)目標網絡G0節點順序影響
為了研究目標網絡G0節點順序對算法的影響,本文通過100次隨機生成目標網絡節點順序,記錄了針對單側帶高抗線路N-2故障建模的算法耗時。仿真過程中每次運行時間如圖4所示,單側帶高抗線路N-2故障建模平均耗時2.459 s。
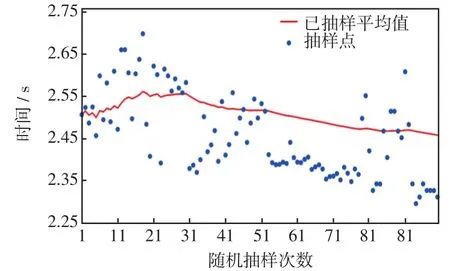
圖4 不同目標網絡節點順序下,單側帶高抗線路N-2故障建模時間Fig.4 Modeling time of N-2 contingency which occurs on lines with shunt reactor on single side with different target network node sequences
采用上述抽樣方法,表2記錄了不同類別故障建模平均用時。其中“中開關拒動故障”是指3/2接線中斷路器在出線短路后拒動,進而引發后備保護動作,跳開同串邊斷路器以及同串出線末端斷路器的連鎖形式的故障;“雙重中開關拒動故障”是指在“中開關拒動故障”的基礎上,后備保護中同串出線末端斷路器拒動而繼續引發下一級后備保護動作的連鎖故障。以上兩種故障均是繼電保護拒動而可能引發的連鎖故障,是與運行方式無關且可以準確描述、建模的連鎖故障。利用本文方法,以上2類故障建模僅需1.362 s、0.735 s。本文方法不僅能夠快速建模N-1、N-2等傳統故障,還能夠適應連鎖故障建模。
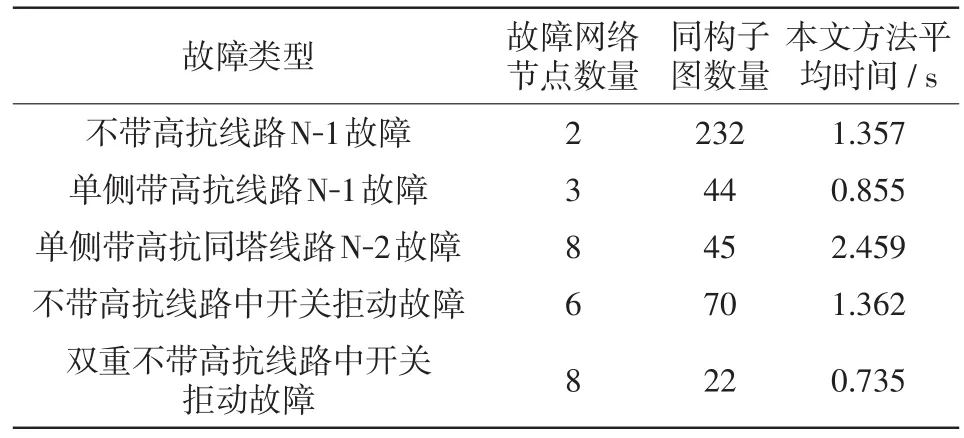
表2 不同類別故障建模本文方法平均用時Tab.2 Average time consumption by modeling different types of fault using the proposed method
2)故障網絡Gf搜索順序影響
G0節點的類型分布如圖5所示。考慮電力系統網絡特點,Gf節點搜索順序按照類型分布概率由多到少和由少到多進行故障建模的算法耗時如表3所示。對于單一節點類型的故障網絡,搜索順序影響不大;對于多節點類型的故障網絡(例如表3中單側帶高抗線路N-1故障、單側帶高抗線路同塔N-2故障),故障網絡Gf搜索順序十分關鍵,本文方法有良好的搜索效率。
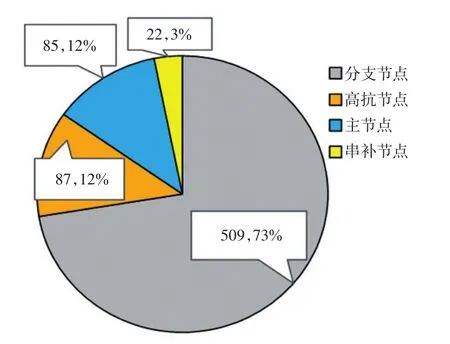
圖5 區域電網節點類型分布Fig.5 Node type distribution in regional power grid
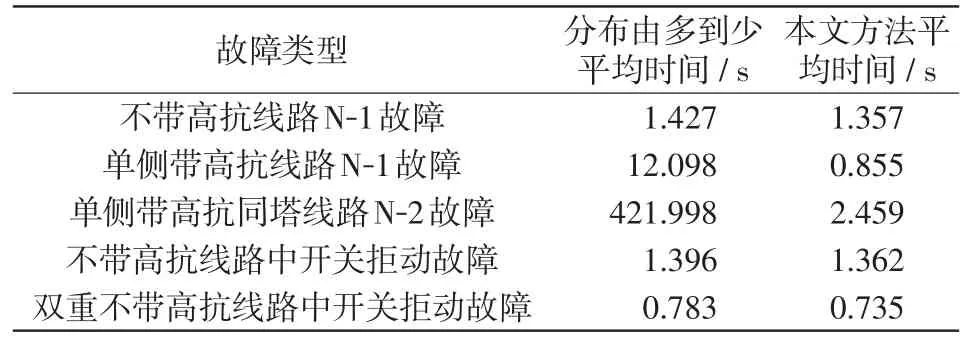
表3 故障網絡搜索順序對故障建模用時影響Tab.3 Impact on time consumption by fault modeling with different search sequences of fault network
3.2.2 不同建模方法對比
VF3方法[23]與本文方法故障建模的所需時間對比如表4所示。由于未考慮節點語意信息,在不帶高抗線路N-1故障建模中,VF3算法平均用時低于本文提出方法,略有優勢。但同樣由于未考慮節點語意信息,隨著故障復雜程度增加,對比本文方法,VF3算法效率下降,識別結果出現了不準確的情況。例如在單側帶高抗線路N-1故障識別的過程中,同一故障路徑的正序、反序被重復識別了2遍;缺失對“同塔”語意的處理,導致單側帶高抗同塔線路N-2故障不僅重復識別,甚至識別出非同塔N-2故障。因此基于子圖同構的電力系統故障建模方法中,考慮節點語意是必要的。
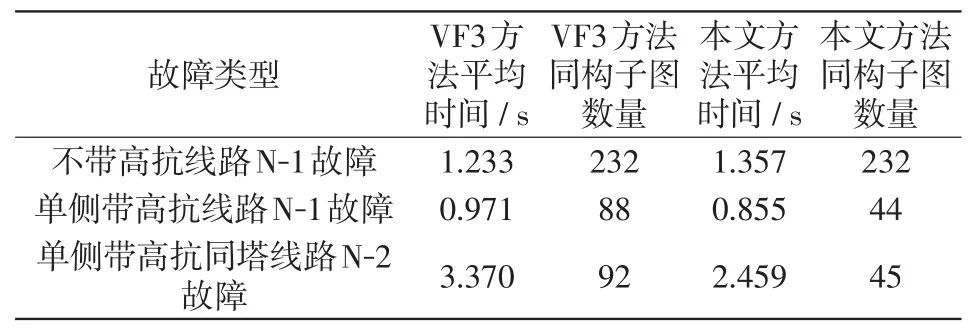
表4 VF3方法與本文方法故障建模所需時間及準確度對比Tab.4 Comparison of time consumption by fault modeling and accuracy between VF3 method and the proposed method
圖計算方法[6]與本文方法故障建模的所需時間對比如表5所示。2種方法建模耗時均為秒級,而圖計算方法總體速度甚至超過了本文算法。原因是圖計算的方法根植于對電網計算數據的深入人工分析,針對特定故障的優化能夠保證圖計算方法較高的效率。但隨之而來的缺點是適用性差,依賴所研究電網的數據組織形式,無法隨時切換到其他地區或者其他仿真平臺。
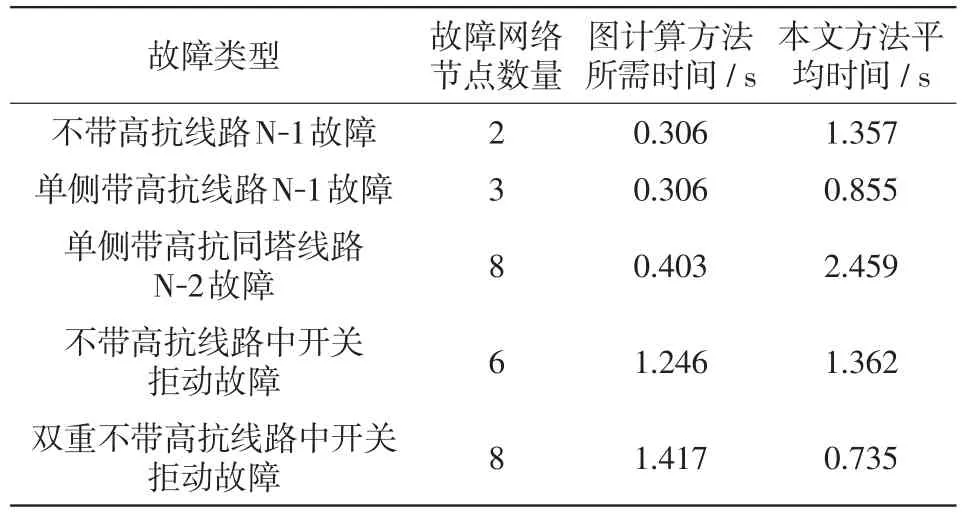
表5 圖計算方法與本文方法故障建模所需時間對比Tab.5 Comparison of time consumption by fault modeling between graph calculation method and the proposed method
隨著故障的復雜程度增加,有限人工經驗總結的圖計算的方法無法更加充分地利用節點語意等故障信息,多重循環下故障路徑搜尋的效率將不斷下降。例如在雙重不帶高抗線路中開關拒動故障建模中,圖計算方法所需時間1.417 s大于本文方法平均用時0.735 s。本文方法在復雜故障建模中更具優勢。
3.2.3 對電力系統結構、運行方式及仿真數據結構的適應性
通過應用本文方法對該區域電網歷史數據(選取2019年)以及本年度檢修方式數據以及本年度PSD-BPA(電力系統仿真軟件,與PSASP仿真數據結構不同)數據進行不帶高抗線路N-1故障建模,均得到該電力系統結構、運行方式以及軟件數據結構下完整的故障集合,所用時間對比如表6所示。

表6 本文方法適應性驗證Tab.6 Adaptability verification of the proposed method
對比可見,不同仿真軟件下的數據結構不會影響最終故障集合里故障的數量。檢修方式下,故障數量會降低;隨著電網的發展,不同年度的故障數量會隨設備的投產、退役有增有減,隨著各區域電網特高壓交流項目推進,現有常規電壓等級網架結構優化分析以及調度運行將更加依賴快速、準確的故障建模方法。
本文提出的基于子圖同構的電力系統故障建模方法效率能夠滿足大型區域電網在線安全分析校核的需要,同時也能夠為電力系統離線仿真分析提供可靠支持。本方法優點是:不依賴所研究電網的數據組織形式,可以一次開發,隨時部署到任意區域電網、任意仿真平臺中使用;還能夠適應復雜故障的全網建模。
4 結語
本文通過對電力系統故障模型進行了統一的數學表達,分析了故障建模的數學實質,結合電力系統網絡節點類型分布與節點語意信息特點提出了基于子圖同構的電力系統故障建模方法。區域電網算例結果表明本文提出的方法立足于圖論基礎理論,不依賴具體數據結構,能夠實現電力系統仿真故障模型快速精準建模。本文方法具備推廣到互聯網、供氣、供熱、供水、交通等物理網絡仿真故障建模的可能性,未來將在相關領域可以進一步提煉。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
兒童故事畫報(2019年5期)2019-05-26 14:26:14
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34