基于實際控保錄波的HVDC送端區內閥短路故障定位
2023-02-13 07:04:30黃明偉周仕豪
電力系統及其自動化學報 2023年1期
黃明偉,王 力,周仕豪
(1.長沙理工大學電氣與信息工程學院,長沙 410114;2.國網江西省電力有限公司電力科學研究院,南昌 330096)
隨著我國高壓直流輸電HVDC(high voltage direct current)工程的陸續投運,HVDC在電網中承擔的大容量、遠距離輸電作用愈加突出[1-3]。換流器作為HVDC系統的核心設備,由于受自身器件特性約束,耐過電流能力較弱;而閥短路故障作為HVDC最嚴重的一類故障[4-5],其發生后必須盡快切除以保護換流器設備。但換流站內不同位置的閥短路故障與閥短路保護并不一一對應[5],導致故障后的分析往往依賴于富有經驗的運行人員,不利于故障的迅速排查和檢修。因此,研究不同位置閥短路故障的定位方法對于提升事故分析效率、保障HVDC系統高效運行具有重要意義。
目前,國內外學者針對HVDC換流器的故障分析與定位進行了大量研究。利用保護動作情況可實現故障定位,其中,文獻[6]根據兩類閥短路保護的動作情況,通過故障時段劃分,提出定位故障橋的方法,但其定位精度有待進一步提高;文獻[7]將故障后電氣特征與時延相結合,實現逆變站接地短路故障定位,但該方案采用的延時較長,定位結果易受控制系統影響;文獻[8]分析了整流站幾種典型接地故障的電氣量特征,并考慮控制系統的影響,提出基于直流差動保護動作的接地故障定位方案,但未能進一步展開對閥短路故障的討論;文獻[9]根據閥導通時序將閥區劃分為若干區域,并根據各區域差流大小識別故障區域,但其未能結合保護動作提高定位精度;根據故障后采樣窗內各橋臂電流和換流變閥側三相電流積分的大小關系,可實現3種閥短路故障定位[10],但實際工程中不易獲取各閥的橋臂電流。此外,文獻[11-14]基于人工智能算法提出換流器故障診斷方法,但該類方法需要構建含眾多數據的樣本庫,實際應用中有待進一步研究。
綜上所述,針對目前常規HVDC系統閥短路故障的定位方法研究較少,且已有研究未能結合實際直流控保系統展開。本文基于實際直流控保系統錄波數據,考慮閥短路故障后控保系統執行的動作邏輯,結合不同閥導通狀態下的故障特征,提出整流站閥短路故障定位方法,并在RTDS和實際直流控保系統構成的閉環仿真平臺進行了驗證。
1 整流側閥區保護配置
常規HVDC工程一般采用12脈動換流器作為基本單元,單個6脈動器連接一組換流變,并根據換流變二次側聯結形式,將12脈動換流器內部分為Y橋和D橋,由于閥短路故障后Y橋和D橋的故障特征類似,故本文以Y橋為例展開分析。
結合現場實際,換流器區內可能發生的閥短路故障主要包括換流變閥側電流側點至換流器間相間短路K1、橋臂短路K2、6脈動換流器出線短路K3及12脈動換流器出線短路K4,如圖1所示。圖1中,IYMAX、IDMAX分別為Y橋和D橋換流變閥側三相交流電流的最大值;IDH、IDN分別為換流器高壓端和中性線側直流電流;VY1~VY6、VD1~VD6分別為Y橋和D橋對應的6個橋臂。
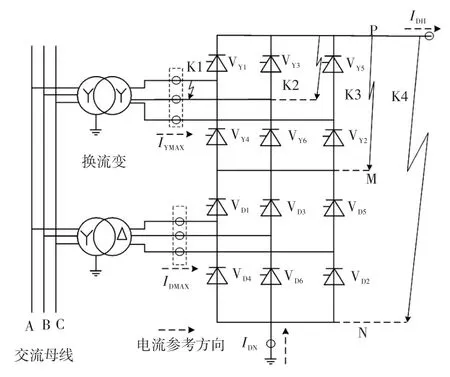
圖1 換流器區測點及故障點位置Fig.1 Measuring point and fault point location in converter area
針對換流器區內閥短路故障,目前工程中一般對單個Y橋或D橋配置基于電流差動保護原理的閥短路保護[5],其動作判據為
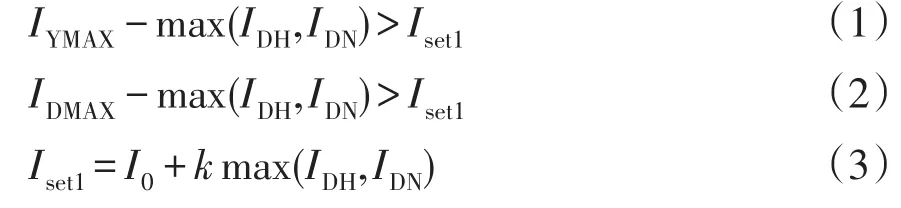
式中:Iset1為保護動作整定值;I0為保護的啟動定值,一般取為0.5倍額定電流;k為比例系數,取為0.2。
閥短路故障作為HVDC系統最嚴重的一種故障,對其配置的閥短路保護的動作需考慮避免第3只閥導通[5],而保護的動作將影響不同位置的閥短路故障特征。
2 閥短路故障特征分析
根據換流器工作原理可知,由于閥導通狀態的不同,不同時刻發生的閥短路故障特征可能存在差異[7],因此,需探究不同閥導通狀態下的故障特征。以VY1、VY2導通狀態為例展開分析,并基于RTDS與實際直流控保系統構成的閉環仿真平臺(下文簡稱仿真平臺)進行驗證,其中保護錄波采樣率為10 kHz。為便于分析,以A相電壓為參考,根據直流輸電原理[4]有
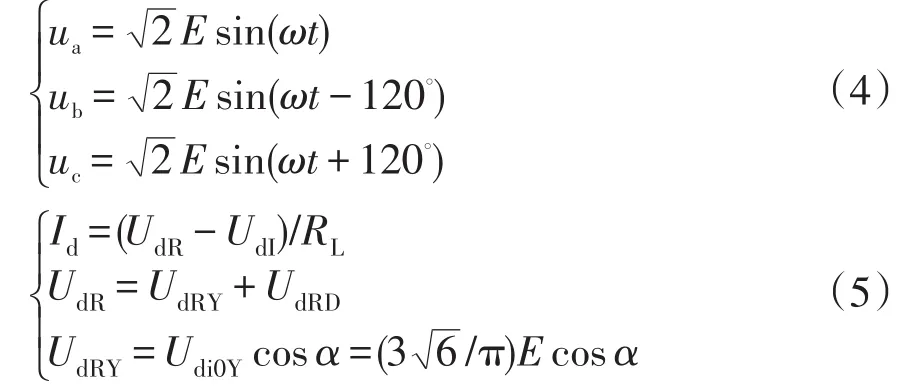
式中:ua、ub和uc分別為Y橋換流變閥側三相電壓;E為相電壓有效值;Id為直流電流;UdR、UdI分別為整流側和逆變側直流電壓;RL為直流回路電阻;UdRY、UdRD分別為整流側Y橋和D橋換流變提供的直流電壓;Udi0Y為Y橋換流器的直流空載電壓;α為換流器的觸發角。
由于VY1、VY2導通階段對應的A相電壓相角范圍為[90°+α,150°+α],工程中α一般運行于15°左右[5]。為便于表示,將VY1、VY2同時導通的狀態記為S1,后續導通順序依次記為S2~S6,并將Y橋橋臂故障按橋臂編號依次記為K21~K26。以S1狀態、故障角為135°時的不同位置發生閥短路故障為例展開分析。
2.1 6脈動換流器出線短路故障特征分析
當發生6脈動換流器出線K3故障時,故障后的電流回路及控保錄波如圖2所示。由圖2可知,故障時回路1通過導通閥VY1、VY2和故障點形成AC兩相短路,由于故障回路阻抗很小,IYA、IYC增大,相應地IYMAX增大;故障后Y橋Udi0Y=0,且整流側故障后,逆變側電壓不會立即產生變化,根據式(5)可知,回路2中電流IDH、IDMAX和IDN減小,此時,Y橋閥短路保護動作。在圖2(b)中,Y橋測點三相電流IYA、IYB和IYC采用標幺值,系統額定電流為5 kA。
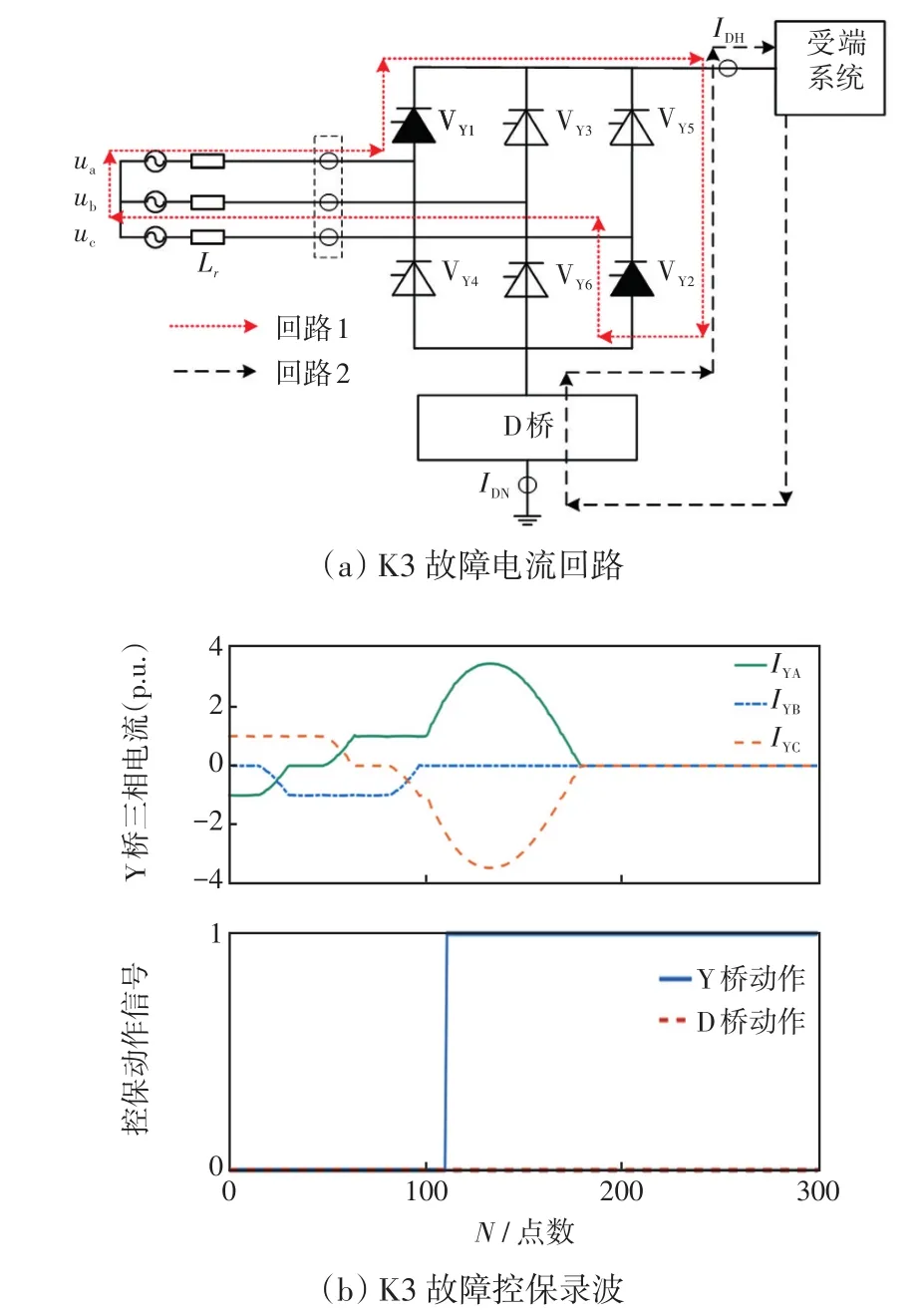
圖2 K3故障電流回路及控保錄波Fig.2 K3 fault current loop,and control and protection recording wave
2.2 12脈動換流器出線短路故障特征分析
12脈動換流器出線K4短路后的電流回路及控保錄波如圖3所示。此時整流側相當于完全被短路,由式(5)可知,回路2中電流迅速降為0,即IDH、IDN迅速減小;回路1通過故障點形成相間短路,Y橋IYA、IYC增大,相應地IYMAX增大,D橋導通閥所在相電流同樣增大,IDMAX增大;此時,Y橋和D橋閥短路保護均動作。

圖3 K4故障電流回路及控保錄波Fig.3 K4 fault current loop,and control and protection recording wave
2.3 整流器橋臂短路故障特征分析
當導通狀態處于S1時,若此時VY1或VY2發生閥短路故障,顯然在S1階段無故障特征,Y橋閥短路保護不會立即動作。因此需要分析非導通閥發生閥短路故障后的電氣量特征。
2.3.1 橋臂VY3短路
當發生橋臂VY3短路即K23故障,故障后的電流回路及控保錄波如圖4所示。根據式(4)可知,在[-30°,150°]內存在uab>0,故若故障發生在[90°+α,150°]期間,此時上橋臂導通閥VY1與故障閥VY3形成AB相間短路,回路1中電流IYA、IYB和IYMAX增大,又由于AB相間短路同樣會使UdRY下降,相應地UdR下降,由式(5)可知,回路2中電流IYC、IDH、IDMAX和IDN減小;若故障發生于[150°,150°+α]期間,由于uab<0,此電壓恰為VY1與VY3的換相電壓,相當于提前進行換相,故該階段發生K23短路故障,并不會產生故障電流,Y橋閥短路保護不會立即動作。因此,當故障發生于[90°+α,150°]期間,故障角越接近150°,故障后A相和B相電流增大越不明顯,Y橋閥短路保護可能動作。

圖4 K23故障電流回路及控保錄波Fig.4 K23 fault current loop,and control and protection recording wave
但無論此階段保護是否動作,經換相后,當閥導通狀態為S4時即處于[270°+α,330°+α],由式(1)可知,由于此時有ucb>0,K23短路將導致CB相間短路,短路電流使Y橋閥短路保護可靠動作,因此可依靠閥短路保護動作所處閥導通階段的三相電流的故障特征進行不同橋臂短路的定位。圖4(b)、(c)為仿真平臺所得結果,S1狀態時發生故障角為135°的K23故障,故障電流先增大至1.13 p.u.后減小并伴隨VY1與VY3換相,閥短路保護未動作,S1狀態之后的故障特征與理論分析一致。
2.3.2 橋臂VY4、VY5短路
當發生橋臂VY4短路即K24故障,故障后的電流回路及控保錄波如圖5所示。根據式(4)可知,在[30°,210°]內存在uac>0,故在S1導通階段,下橋臂故障閥VY4與導通閥VY2形成AC相間短路,回路1中電流IYA、IYC和IYMAX增大;此時Y橋換流變被VY4和 VY1短路,由式(5)可知,回路2中電流IDH、IDMAX和IDN減小,此階段Y橋閥短路保護動作。若發生K25故障,由分析可知其故障特征與K24故障特征一致。
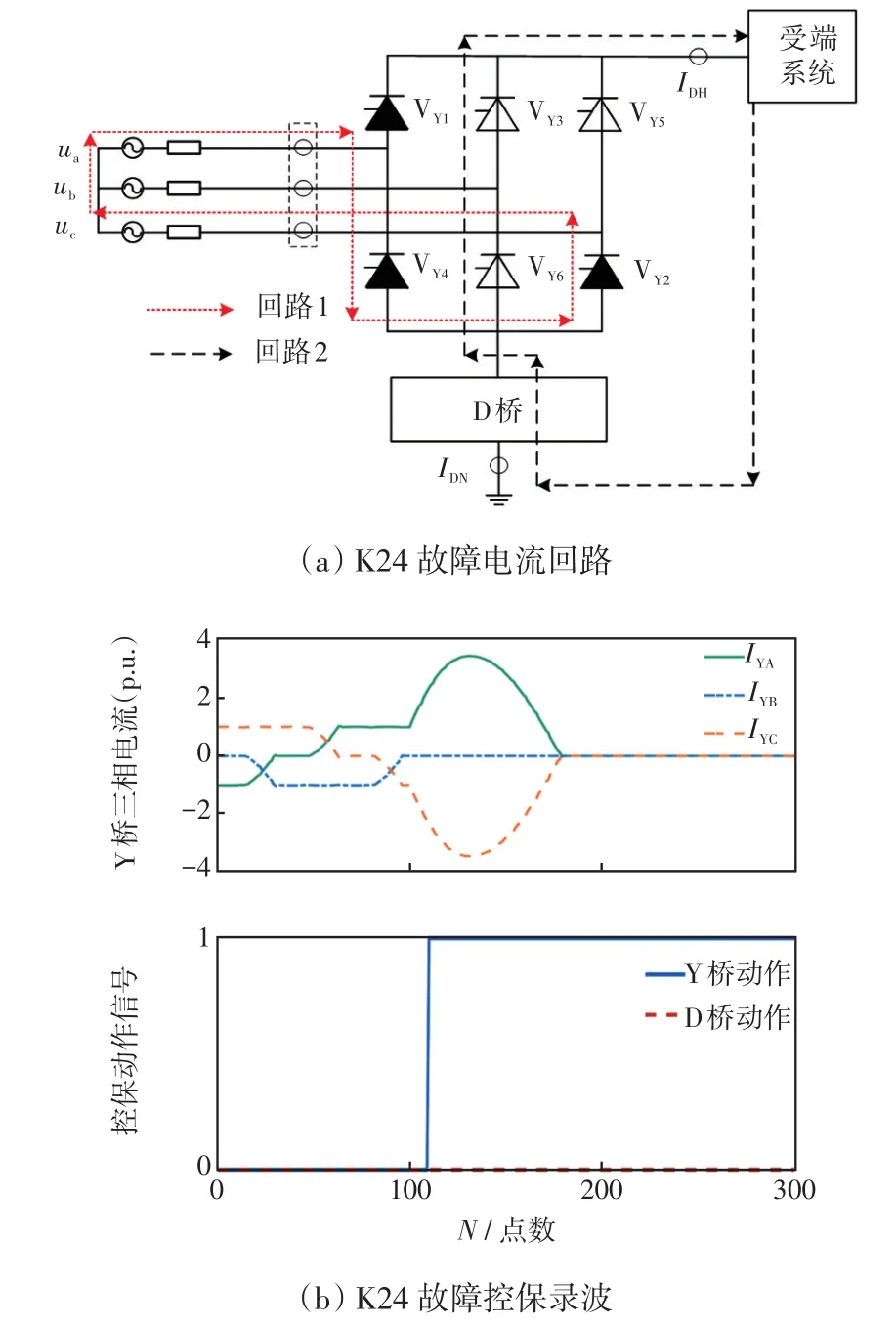
圖5 K24故障電流回路及控保錄波Fig.5 K24 fault current loop,and control and protection recording wave
2.3.3 橋臂VY6短路
當發生橋臂VY6短路即K26故障時,故障后的電流回路及控保錄波如圖6所示。由式(4)可知,在[90°,270°]內存在ubc>0,故在 VY1、VY2導通階段,下橋臂故障閥VY6與導通閥VY2形成BC相間短路,回路1中電流IYB、IYC和IYMAX增大;BC相間短路導致整流側直流電壓下降,由式(5)可知,回路2中電流IDH、IDMAX、IDN減小。此階段Y橋閥短路保護動作。

圖6 K26故障電流回路及控保錄波Fig.6 K26 fault current loop,and control and protection recording wave
2.4 交流側相間短路故障特征分析
鑒于交流側三相對稱,此處以AB相間短路為例,故障后的電流回路及控保錄波如圖7所示。與K23故障類似,回路1中電流IYA、IYB和IYMAX增大,回路2中電流IDH、IDMAX和IDN減小,Y橋閥短路保護動作;閉鎖故障閥組和跳交流進線開關,由于此時回路1不包含橋臂,在閥組被閉鎖后,故障電流仍然存在,直至交流進線開關跳開后,故障電流才開始消失。
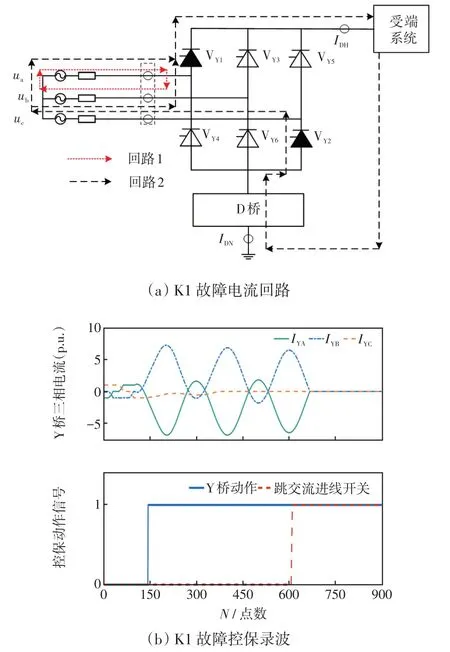
圖7 K1故障電流回路及控保錄波Fig.7 K1 fault current loop,and control and protection recording wave
綜上,基于第2節中不同閥短路故障特征的分析可知,利用Y橋和D橋均動作可識別12脈動換流器出線短路;利用閥短路保護動作后跳交流開關的時刻對應故障橋的三相電流是否為零來識別交流相間短路。對于橋臂短路和6脈動換流器出線短路,需進一步分析S2導通階段時的Y橋三相電流故障特征,其分析結果與S1導通階段的結果如表1所示,表1中,一字線表示該階段無故障特征。結合第2.1和第2.3節分析可知,①若故障發生于S1狀態的初始階段,如圖3(a)和圖5(a)所示,由于閥短路保護動作,閉鎖故障閥的觸發脈沖,且控制系統為限制直流電流增大而增大整流側觸發角α,在二者共同作用下導致故障后VY3觸發脈沖被閉鎖,此時無法對K24、K25、K3進行進一步區分;②若故障發生于S1狀態的結束階段,如圖8所示,由于控保未能及時閉鎖閥VY3觸發脈沖,VY1與VY3成功換相,閥組進入S2狀態,此時可結合換相前后2個狀態的故障特征進一步判斷K24故障。
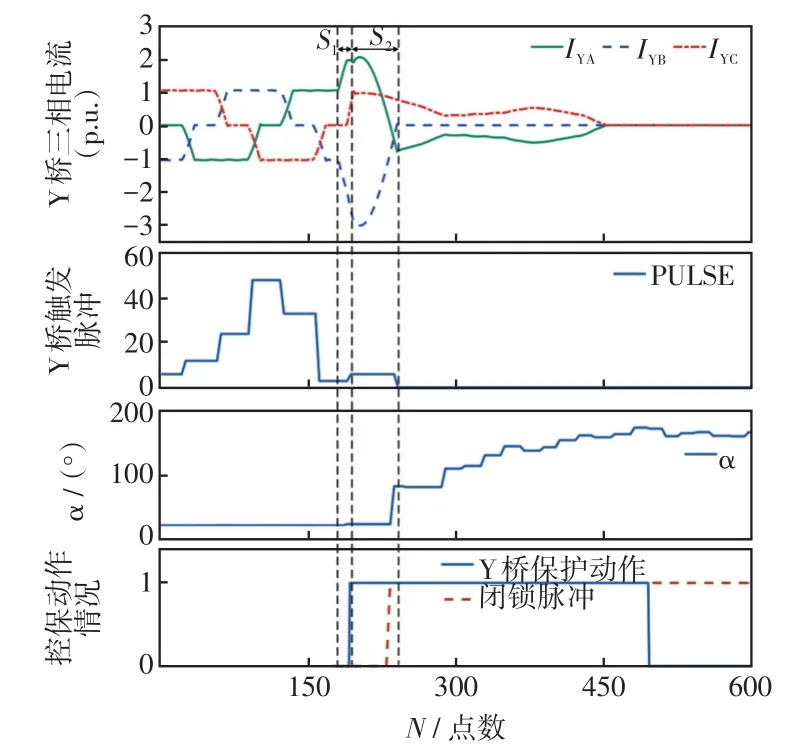
圖8 故障角為155°的K24故障錄波Fig.8 K24 fault recording wave with fault angle of 155°

表1 S1和S2狀態時不同位置的故障特征Tab.1 Fault characteristics at different positions in statesS1andS2
其余各狀態與S1、S2狀態具有類似的特征,限于篇幅,此處不再展開。
3 融合各橋控保動作情況和故障電流幅值特征的閥短路故障定位方法
3.1 閥短路故障特征的影響因素分析
實際工程中的閥短路保護在滿足動作條件后,延時500 μs即出口動作,而后控制系統按照預設的邏輯閉鎖故障閥組觸發脈沖,并對非故障閥組移相,后續還會執行跳交流進線開關等操作[5]。基于第2節的分析可知,閥短路保護動作后控制系統的作用將對故障特征產生重要影響,因而需要進一步分析控制系統動作邏輯對故障特征的影響。
對于閉鎖脈沖而言,以S1狀態為例,當故障位置為K1時,由于其電流回路不包含橋臂,閥短路保護動作后,控制系統動作對其故障特征并無影響;若故障為K2、K3、K4,故障電流回路由故障閥和已導通的閥組成,由于晶閘管為半控器件,閉鎖脈沖信號對已導通閥無影響,因此故障后無論是否發生狀態切換,閉鎖脈沖對故障特征均無影響。
而對于觸發角α而言,由式(5)及圖(8)可知,若故障后存在狀態切換,閥短路保護動作并執行移相操作后,控制系統增大觸發角α,換相后導通閥電流顯著減小。因此,為了避免保護動作后控制系統對故障后電氣量的作用,故障定位方案中應取α角增大前對應的電氣量。可通過判斷α角前后2個采樣點差值Δα是否大于設定的閾值以實現故障數據的選取,考慮閥短路保護動作后,α角按照預設邏輯由初始值15°左右增大至90°,由大量的錄波數據得出Δα取為20°較為適宜。此外,對于故障電流判據閾值的選擇,應考慮躲過正常運行時可能出現的最大電流,本文將其整定為1.15 p.u.。參考現有方法,根據連續3個采樣點滿足判據實現故障的判斷[8]。
3.2 閥短路故障定位方案設計
基于第2節及第3.1節對閥短路故障后不同位置故障特征及影響因素的分析,建立整流站閥短路故障定位流程如圖9所示,其具體步驟如下。
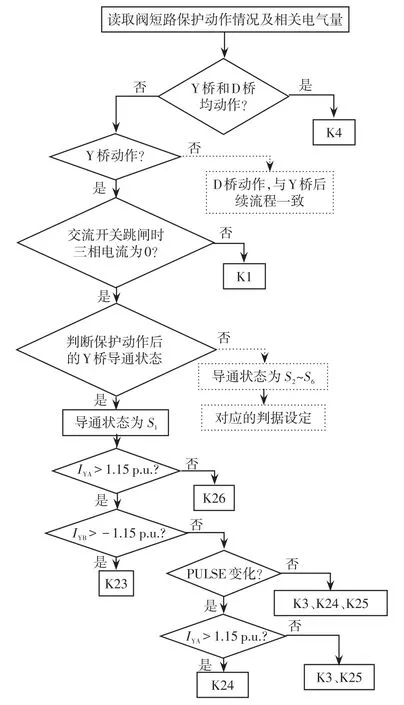
圖9 閥短路故障定位方案Fig.9 Valve short-circuit fault location scheme
步驟1根據閥短路保護動作信號判斷是否進行故障定位,若存在閥短路保護動作,則進行步驟2。
步驟2根據閥短路保護動作類型判斷故障所在橋,若Y橋和D橋閥短路保護均動作,則判斷12脈動換流器出線發生短路故障;否則進入步驟3。
步驟3判斷是否為Y橋動作,若否,則判斷為D橋動作,后續流程與Y橋一致;若是Y橋動作,則繼續判斷交流開關信號跳變對應時刻Y橋三相電流是否均為零,若否,則判定為交流側相間短路K1故障,若是,則進入第4步。
步驟4取故障開始至滿足Δα大于20°對應時刻之間的Y橋三相電流IYA、IYB,和IYC,根據對應的IYA、IYB和IYC及脈沖觸發信號PULSE確定所處閥組狀態Si以決定后續流程;此處以S1為例敘述,確定閥組狀態為S1后則進入步驟5。
步驟5判斷狀態S1中IYA是否存在連續3個點滿足IYA>1.15 p.u.,若否,則判定為Y橋橋臂VY6短路K26故障;若是,則進入步驟6。
步驟6判斷狀態S1中IYB是否存在連續3個點滿足IYB>-1.15 p.u.,若是,則可確定為Y橋橋臂VY3短路K23故障;若否,則進入步驟7。
步驟7判斷所取故障數據中觸發脈沖PULSE是否發生變化,若否,則確定故障為Y橋橋臂VY4短路K24故障、VY5短路K25故障或6脈動換流器出線短路K3故障;若是,則進一步根據PULSE信號判斷S2狀態中是否存在連續3個點滿足IYA>1.15 p.u.,若是,則判斷為K24故障,若否,則可確定為K25或K3故障。
4 基于實際控保系統的閥短路故障定位驗證
采用本文所提故障定位方案,基于RTDS與直流控保系統的閉環仿真平臺,針對S1~S6狀態下不同位置發生的閥短路故障進行仿真驗證。限于篇幅,以S2狀態下Y橋不同位置和S1~S2狀態下D橋不同位置的閥短路故障為例,其結果如附錄表A1和表A2所示。在附錄表A1和表A2中,K2Y1~K2Y6、K2D1~K2D6分別為Y橋和D橋對應6個橋臂短路;VSCPY、VSCPD分別為Y橋和D橋閥短路保護動作,其值為1表示動作;IYA、IYB、IYC和IDA、IDB、IDC分別為Y橋和D橋換流變閥側三相電流,其值為各狀態下電流標幺值的范圍;IACSW為跳交流開關時刻對應三相電流,其值用1或0表示跳交流開關時對應三相電流是否均為0。由于在S1和S2狀態下,K2Y2、K2Y3和K2D2、K2D3無故障特征,附錄表A1和表A2中 K2Y2(S3)、K2Y3(S4)和K2D2(S3)、K2D3(S4)對應三相電流特征分別為Y橋和D橋對應位置在S3和S4狀態的故障特征,表中一字線為該階段無故障特征。
由附錄表A1和表A2可知,當且僅當12脈動換流器出現短路會導致VSCPY和VSCPD為1,Y橋或D橋交流側相間短路時IACSW為0,據此特征可識別12脈動換流器出線短路和交流側相間短路;對于橋臂短路和6脈動換流器短路,根據各橋三相電流與設定的各相閾值比較加以區分。仿真平臺所得結果與理論分析一致,說明本文所提定位方法可有效識別整流站區內閥短路故障。
5 結論
本文基于實際控保系統閥短路保護動作邏輯及換流器各導通狀態下不同位置閥短路故障時Y橋或D橋測點三相電流的故障特征,提出整流站區內閥短路故障定位方法,主要結論如下。
(1)理論分析了4種典型區內閥短路故障的特點,其中僅12脈動換流器出口短路會導致Y橋和D橋閥短路保護均動作;換流器故障后的短路電流在閥組閉鎖后,隨導通閥電流過零點關斷后消失,而交流側相間短路故障電流需要控制系統執行跳交流進線開關后才會消失,從而可識別出交流側相間短路。
(2)換流器各閥導通狀態下不同橋臂短路和6脈動換流器出口短路的故障特征存在異同,可通過結合相鄰導通狀態的故障特征實現進一步的區分。
(3)通過仿真平臺驗證了融合控保數據,以及提取各閥導通狀態下各橋電流幅值特征實現整流站區內閥短路故障定位方法的有效性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50