基于深度圖像的ADHD兒童運動量化算法
2023-01-31 03:35:50李智倩張茜倩李元媛
計算機工程與設計 2023年1期
李智倩,張茜倩,崔 婭,張 晗,李元媛,何 凌
(1.四川大學 生物醫學工程學院,四川 成都 610065; 2.四川大學 華西心理衛生中心,四川 成都 610041)
0 引 言
注意缺陷與多動障礙(attention deficit and hyperactivity disorder,ADHD),是一種常見的關于神經發育問題的行為障礙,會導致健忘、沖動、不安等病理行為;有時還伴隨過度的軀體運動[1,2]。ADHD主要發生在兒童期,影響了3%~7%的學齡前兒童[3-9]。
活動過動是ADHD的主要癥狀[10],臨床上主要通過量表來診斷ADHD[11,12]:包含了監護人和教師的問卷反饋,該方法簡單,能快速收集數據,但存在人為因素的干擾。并且量表中只包含了ADHD患者可能的運動頻率和定性的運動描述,缺乏客觀定量的生物學指標。
針對ADHD兒童活動過動的問題,已經展開了一些研究。Narus等[13,14]用活動感應器檢測ADHD兒童的運動,但是由于活動感應器佩戴在受試者手腕上,會妨礙ADHD患者的自然運動。此外,活動感應器只能監測整個身體的活動,不能定位身體部位的運動。
近年來部分學者基于視頻圖像對ADHD患者的行為模式、身體運動進行了研究。Bautista等[15]提出了一種基于Kinect深度圖像檢測ADHD行為模式的姿勢識別系統,利用該系統對ADHD兒童深度圖像數據測試,測試結果能夠支持臨床醫生進行ADHD兒童模式診斷。Jaiswal等[16]從ADHD患者和健康對照人群的深度圖像數據和RGB數據中提取面部表情、頭部運動、聽覺姿態等特征,分析這些特征對診斷ADHD疾病的潛在作用。Schwichtenberg等[17]利用視頻圖像處理分析ADHD兒童睡眠時的身體運動,利用視頻圖像中像素的變化來表征ADHD兒童的運動變化,統計了ADHD兒童睡眠期間的軀體運動時間及休息時間。以上主要對ADHD兒童的行為模式、運動姿勢分類進行研究,缺少對ADHD兒童運動的量化。臨床上表明[18],運動量化有助于對ADHD兒童的活動過動癥狀研究,對臨床醫生診斷ADHD有一定的參考價值。
本文基于Kinect2.0[19]采集的ADHD患者深度視頻,提出了一種自動量化ADHD兒童運動的算法。首先利用DSST算法跟蹤ADHD兒童目標區域,然后提出基于NLGD(noise location distribution information and gray distribution information)的去噪算法去除目標區域的噪聲,并利用等值線算法分割出ADHD兒童的身體區域。最后提出運動時長特征,統計ADHD兒童身體隨時間的運動變化,輔助臨床醫師對ADHD活動過動癥狀進行診斷。
1 本文提出的ADHD兒童運動的自動量化算法
為了量化ADHD兒童的運動,輔助臨床醫師對ADHD進行診斷,本文提出了ADHD兒童運動的自動量化算法。該算法主要包括ADHD兒童目標區域的實時跟蹤、ADHD兒童目標區域去噪以及分割、ADHD兒童運動量化3部分。首先基于DSST算法對ADHD兒童目標區域進行位置跟蹤,然后基于目標區域的噪聲特點,提出基于NLGD的去噪算法處理目標區域的噪聲。并結合等值線算法提取出ADHD兒童的身體區域。最后根據ADHD兒童活動過動癥狀,提出了基于CoM(center-of-mass)的運動時長特征,用于量化ADHD兒童的運動。該ADHD兒童運動的自動量化算法的總流程如圖1所示。
1.1 基于DSST算法的ADHD兒童目標區域自動跟蹤
本文基于DSST[20](discriminative scale space tracker)目標跟蹤算法,對深度視頻中的ADHD兒童目標區域自動定位。DSST算法首先引入多特征融合機制,將HOG(histogram of oriented gradient)、CN(color names)、灰度特征進行融合,對初始目標進行高斯建模,然后利用目標的特征和高斯函數合成相關位置濾波器進行跟蹤,得到目標的位置。然后在下一幀將測試的圖像提取融合特征作為輸入,經過尺度濾波器處理,得到響應值最大的候選目標,在目標位置的基礎上通過調整跟蹤框的比例來找到響應值最大的尺度,從而在小范圍內實現尺度自適應。
1.2 本文提出的ADHD兒童身體區域分割算法
本文提出了基于NLGD的去噪算法,去除ADHD兒童目標區域的干擾噪聲,并且利用等值線算法,提取ADHD兒童身體邊緣信息,分割得到ADHD兒童的深度身體區域。具體的處理過程如下:
1.2.1 ADHD兒童深度圖像中噪聲分布分析及計算
由于采集裝置,光源等影響,ADHD兒童周圍存在不同程度的噪聲干擾,主要是邊緣跳動噪聲和“空洞”噪聲[21]。
圖2表示的是ADHD兒童目標區域的噪聲分布,圖2(a)表示ADHD兒童人體邊緣的噪聲,如果ADHD兒童離傳感器太遠或近紅外在ADHD兒童表面發生多次反射,ADHD兒童人體邊緣會產生噪聲,它從背景到前景,頻繁地來回跳動。圖2(b)表示ADHD兒童雙腿下半部位存在明顯的波浪狀“空洞”區域,是由特殊的反射材料、快速移動、多孔表面和其它隨機效應引起的灰度值為零的無效深度信息[2]。人體邊緣跳動的噪聲和波浪狀的“空洞”噪聲比實際運動大很多倍[3]。
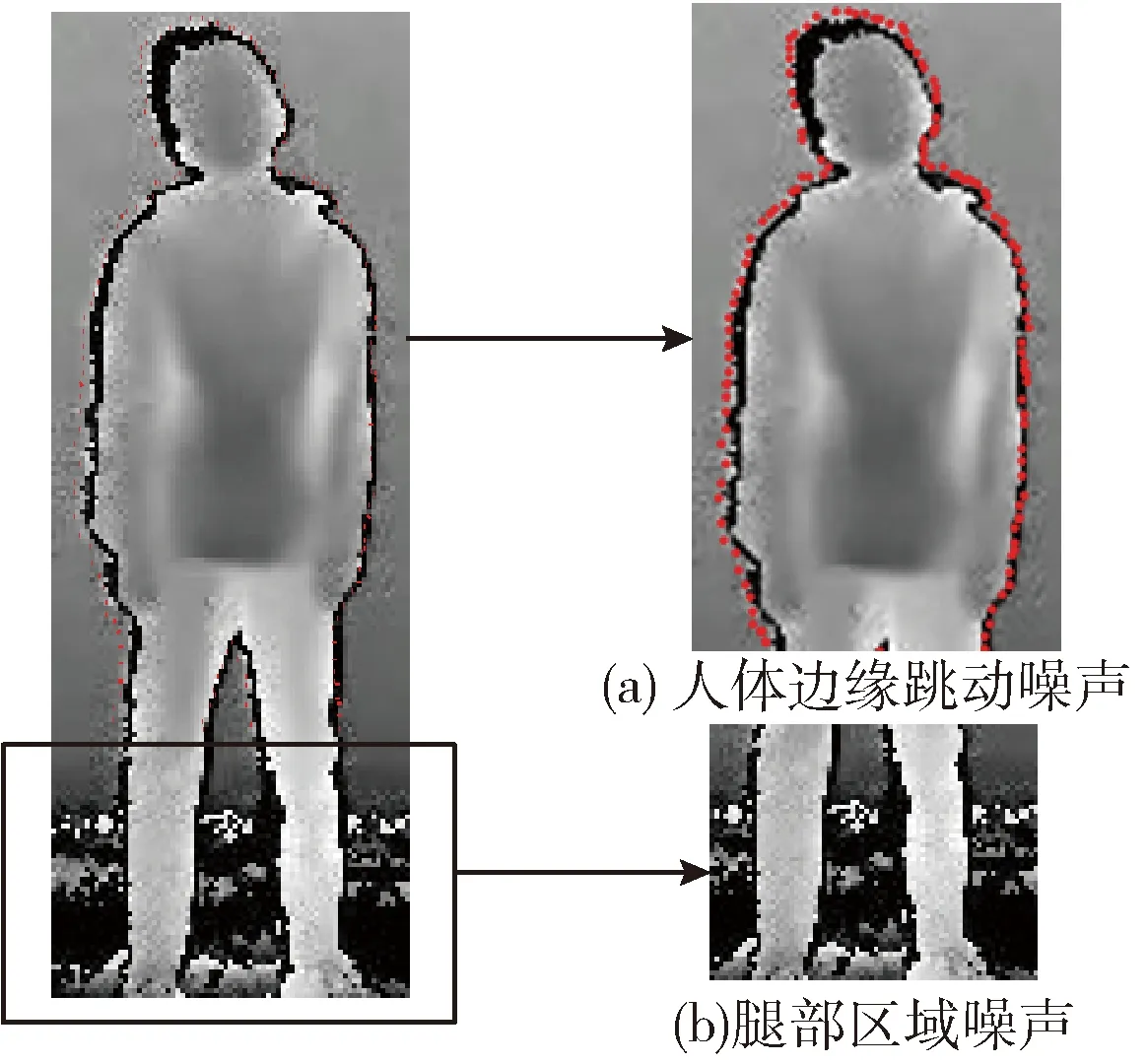
圖2 ADHD兒童目標區域的噪聲分布
為了去除以上噪聲,本文提出了一種基于圖像熵[22]分布的噪聲區域估計方法,得到噪聲的分布信息。在檢測過程中,設置了4×4大小的移動模板,遍歷ADHD兒童目標區域,對每個4×4小區域求熵值,計算過程如式(1)所示
(1)
其中,H(x) 表示4×4區域內像素點計算得到的熵。P表示具有特定灰度值的元素在該區域內的出現概率。ai表示每個像素點的灰度值。熵能反映一個區域內的信息量和數據點分布的不確定性,可以用來檢測深度圖像中的噪聲。
圖3表示的是ADHD兒童目標區域的噪聲分布計算過程,其中圖3(c)表示的是對ADHD兒童目標區域分4×4大小計算熵值得到的熵分布圖,其中噪聲所在的區域熵值更高,在圖像中的表現與非噪聲區域存在明顯的差異。
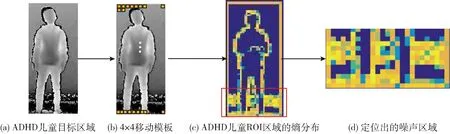
圖3 ADHD兒童目標區域的噪聲分布計算過程
1.2.2 本文提出的基于NLGD的去噪算法
由于深度成像過程中的異常反射、照明障礙或遮擋,深度圖像會受到噪聲的影響。圖4為ADHD兒童目標深度區域噪聲分布的3D示意圖,其噪聲的表現為類地理分布特點,本文將噪聲灰度發生突變的區域定義為“孤峰”,噪聲中間存在“空洞”的區域定義為“盆地”。ADHD兒童主體區域灰度值變化緩慢,相對平坦,表現為“平原”特點。
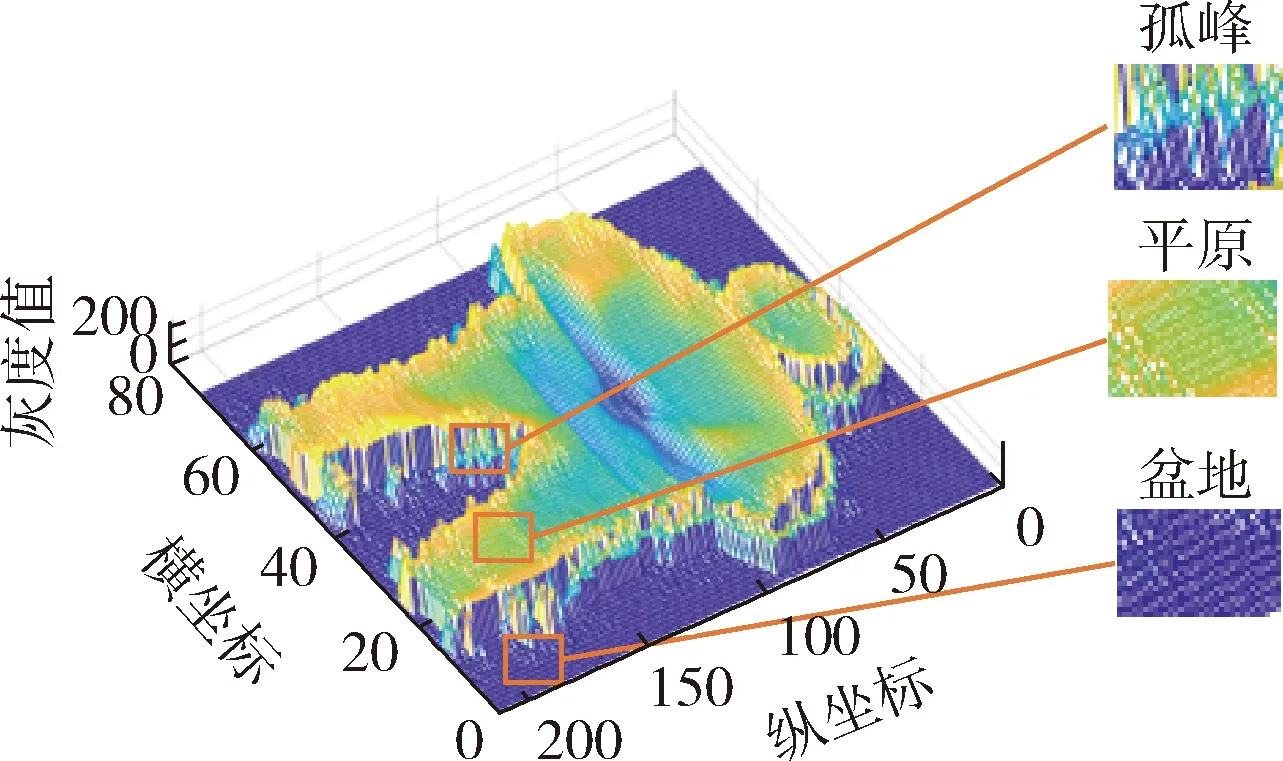
圖4 ADHD兒童目標深度區域噪聲分布的3D示意圖
基于本文ADHD兒童深度圖像中噪聲灰度信息及分布特征信息,提出了基于NLGD的去噪算法,該算法提出了基平面的概念,計算了反映“盆地”噪聲灰度信息的內點M1和反映“孤立峰”灰度信息的外點M2,使ADHD兒童深度圖像中的“孤立峰”和“盆地”背景化。然后為了進一步去除“孤立峰”,根據其分布特點,提出了一種MPD(minimum potential difference)參數,M1、M2和MPD這3個參數反映了噪聲區域和待分割的ADHD兒童區域之間的主體差異。最后,基于這3個參數,用k均值聚類法算法對不同的區塊進行聚類,將噪聲區域背景化,達到ADHD兒童深度圖像去噪的目的。算法過程如圖5所示。
(1)內點和外點的計算
將“孤峰”和“盆地”去除是提取ADHD兒童人體完整邊緣的關鍵。由于“孤立峰”和“盆地”在灰度分布上存在差異,因此基于灰度建立基平面來區分“孤峰”和“盆地”,設置了4×4大小的移動模板,遍歷ADHD兒童目標區域,對每一個4×4大小的區域計算基平面,計算過程如式(2)所示
(2)
其中,Bm是基平面的值,N表示ADHD兒童目標區域中的像素點數,G表示每個像素的灰度值。
然后對4×4區域的像素值進行判斷,設灰度值低于Bm的像素點為內點,灰度值高于Bm的像素點為外點。分別計算內點和外點的平均值,如式(3)~式(4)所示
(3)
(4)
其中,Inliers表示內點,outliers表示外點,M1和M2分別表示內點和外點的平均值,N1和N2分別表示內點和外點的個數。圖6給出了兩個基平面的示例。
如圖6所示,4×4區域中的像素點被區分為內點和外點,外點用“×”表示,內點用“·”表示,當內點和外點灰度值存在差異時,基平面能夠區分內點和外點,即能區分“盆地”和“孤立峰”。

圖6 不同灰度水平的基平面
(2)本文提出的MPD參數
內點和外點是從灰度層面來反映噪聲區域的特征,本文為了評估“孤峰”的離散分布,提出了一個新的參數MPD。MPD的計算過程如下:
1)計算外點權重:對于每一個外點,若它周圍的像素點是內點,則假設它是一個孤立點。該外點周圍的孤立程度可用其周圍的8個像素點來評估。基于上述基平面的4×4移動模板,將所有外點標記為邏輯值0,將所有內點標記為邏輯值1。外點的孤立程度由其八鄰域計算得到,計算過程如式(5)所示
(5)
其中,W是計算的點權重,ai,m是外點周圍的像素,當外點在4×4移動模板的邊緣時,ai,m取4×4移動模板內的點。
2)最小位置匹配度的計算:點權重反映了每個外點的孤立程度,但不能反映所有外點的位置分布關系。因此定義最小位置匹配度參數,用于反映所有外點間的位置分布關系,計算過程如式(6)所示
PM=min{(|m-xi|+|n-yi|),i=1,2,…N}
(6)
其中,PM表示最小位置匹配度; (m,n) 表示當前外點的坐標。 (xi,yi) 表示 (m,n) 以外的所有外點坐標,N表示外點的個數。
3)MPD值的計算:MPD參數是一種位置參數,用來評估像素點在高灰度水平上的分布。對于每一個外點,在式(5)和式(6)中定義了它的點權重w(i) 和最小匹配度PM(i)。 基于這兩個參數,計算MPD參數,如式(7)所示
(7)
其中,N是外點的個數,MPD參數能夠評估外點的孤立度以及分布特點,幫助區分外點,圖7為MPD的計算過程的示例。
如圖7(a)和圖7(b)所示,外點和內點之間形成明顯邊界,體現了噪聲與人體邊緣連接的關系,MPD參數包含邊緣信息。圖7(c)和圖7(d)的外點孤立分布,反映了人體區域出現的孤點噪聲,MPD參數包含孤點噪聲的分布特性。利用MPD參數,可以根據像素點的分布特性估計當前的局部區域是否為噪聲區域。
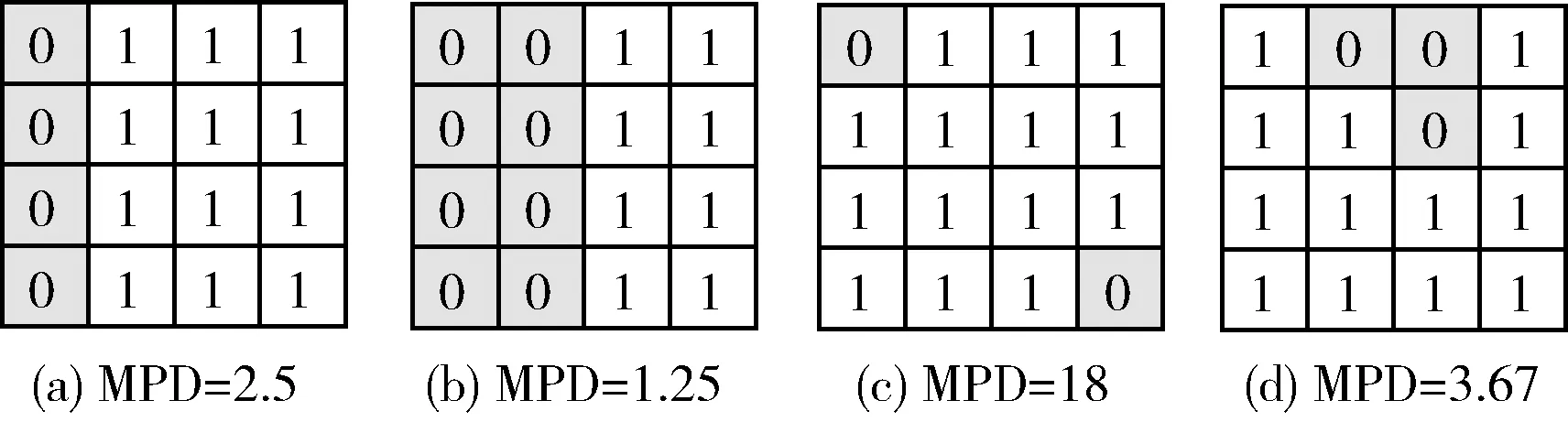
圖7 MPD的計算示例
(3)基于K-均值聚類算法的ADHD兒童目標區域去噪處理
本文提出M1、M2、MPD特征參數,描述噪聲區域的灰度以及分布特點。將ADHD兒童的噪聲區域分成4×4大小的區塊,并計算每個4×4區塊的MPD、M1和M2特征參數。
參與計算的各區塊可分為3種類型:低灰度范圍的“盆地”、高灰度突變的“孤峰”和具有相對平坦表面的“平原”,利用k-均值聚類方法[23]對所有區塊進行聚類,得到3種聚類結果。ADHD兒童主體的深度信息區域大部分是“平原”。
根據聚類結果,將“盆地”區塊和“孤峰”區塊替換為平坦背景,保留檢測到的“平原”區域。由此去除了ADHD兒童目標區域的干擾噪聲,保留了人體邊緣信息。
1.2.3 基于等值線的ADHD兒童目標區域分割算法
Kinect2.0傳感器通過計算發射和接收近紅外光線的時間差得到ADHD兒童的深度信息,如果ADHD兒童離傳感器太遠或近紅外在ADHD兒童表面發生多次反射,ADHD兒童人體邊緣會產生噪聲,它從背景到前景,頻繁地來回跳動,造成ADHD兒童人體的邊緣存在許多斷點[21],影響ADHD兒童人體的分割。在本研究中,采用等值線算法[24]來提取ADHD兒童人體邊緣,在等值線的計算中,采用線性插值來保持人體邊緣的連續性和完整性。
圖8是ADHD兒童目標區域的提取算法流程圖,圖8(a)是利用本文提出的去噪算法處理后的ADHD兒童目標區域圖,圖8(b)是利用等值線算法提取得到的ADHD人體邊緣。然后用邏輯值1填充ADHD兒童人體邊緣之間的區域,用邏輯值0填充邊緣之外的其它區域,得到ADHD兒童人體的二值圖像,填充后的結果如圖8(c)所示。最后將深度圖像圖8(a)和填充圖像圖8(c)相乘,得到去除噪聲后的ADHD兒童人體的深度區域,結果如圖8(d)所示。
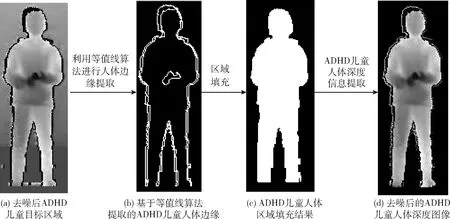
圖8 ADHD兒童身體區域的提取算法流程
1.3 ADHD兒童運動的自動量化評估算法
根據精神障礙診斷和統計手冊(DSM-IV)定義[26],ADHD分為3個亞型:注意力不集中、多動、混合注意力不集中和多動。ADHD患者的行為不受控制,做任務的過程中會亂動和扭動,統計ADHD兒童隨時間的運動變化有利于臨床醫師對ADHD兒童的多動程度進行診斷。
本研究嚴格遵循DSM-IV所描述的癥狀,提出了基于CoM的運動時長檢測算法,對ADHD兒童的運動變化進行統計。該特征統計了ADHD兒童的在完成既定任務時的運動時長,反映ADHD的多動癥狀。基于CoM的運動時長特征檢測算法首先分割肢體,然后根據身體部位的運動情況判斷ADHD兒童整體的運動變化。
1.3.1 身體部位分割算法
利用1.2節算法提取得到的ADHD兒童目標區域深度圖像,①通過人體比例將頭部定位出來,然后將ADHD兒童目標區域深度圖像的頭部區域像素值設置為零。②計算除頭部以外的身體的三維質心(CoM),計算過程如式(8)~式(10)所示
(8)
(9)
(10)
其中,Mx,My,Mz分別為計算的連通域的質心橫坐標、縱坐標和Z軸坐標,N為連通域的像素點總和,i,j,m分別為橫坐標、縱坐標和Z軸坐標的序列號,L(i,j,m)x為連通域的所有橫坐標,L(i,j,m)y為連通域的所有縱坐標,L(i,j,m)z為連通域的所有Z軸坐標。
根據質心坐標 (Mx,My) 的位置,將身體區域劃分為4個部分。將Mx行和My列中的像素設置為0,就可以將除頭部以外的人體區域分割為4個部分,ADHD兒童的身體最終被分為頭部,左右上部,左右下部5個部分。
1.3.2 基于CoM的ADHD兒童運動時長特征提取算法
本文提出基于CoM的運動時長特征算法,用于檢測ADHD兒童在完成既定任務時發生運動變化所包含的圖像幀數,該特征算法以開始測試的第一幀圖像為基準,將后一幀圖像與前一幀圖像作對比,若任意一個身體部位發生了運動則表示ADHD兒童發生了運動變化。統計所有發生運動變化的圖像幀數,用來表示ADHD兒童的運動時長,計算過程如下:
設式(11)表示ADHD兒童身體部位的CoM,利用ADHD兒童的CoM追蹤身體部位的運動
Bcomin=(xin,yin,zin)
(11)
其中,i=h,sr,sl,lr,ll分別表示ADHD兒童的頭部、左右上部、左右下部等5個身體部位。n表示ADHD兒童的圖像幀數,當n=0時,Bcomi0=(xi0,yi0,zi0) 表示ADHD兒童身體部位的基點CoM。
計算ADHD身體部位前后幀圖像的CoM距離差值Lin, 如式(12)所示
(12)
理論上如果當前幀圖像身體部位的CoM與上一幀身體部位的CoM的距離差值Ln≠0, 則表示身體部位發生了運動變化,設fin表示各身體部位當前幀圖像的值,當前幀圖像發生運動變化時,令fin=1, 如式(13)所示
fin=1,(Lin≠0)
(13)
若任意身體部位發生運動變化則表示ADHD兒童發生了運動變化。統計所有存在變化的圖像幀,即得到特征運動時長T,如式(14)所示
(14)
2 實驗結果與分析
2.1 實驗數據
本實驗使用的ADHD兒童視頻數據來自四川大學華西心理衛生中心精神科,四川大學華西心理衛生中心精神科是我國四大精神衛生機構之一。華西心理衛生中心精神科專家參照DSM-V標準,選取符合標準的ADHD兒童參與實驗數據錄制。
在數據收集前,所有參與者及其法定監護人都同意參加研究,法定監護人在知情同意表上簽字。數據錄制過程中,每個ADHD兒童被要求站著觀看一段華西心理衛生中心精神科專家選取的動畫片,同時使用kinect2.0設備對ADHD兒童的活動進行錄制。
本文實驗的研究數據共10人,每個ADHD兒童的視頻平均時長為2 min,數據集中的圖片總幀數為36 000。
2.2 ADHD兒童運動量化的實驗結果與分析
本文提出基于CoM的運動時長特征參數自動量化ADHD兒童的運動。利用基于CoM的運動時長特征算法對實驗數據進行測試,得到自動的ADHD兒童運動時長,將自動的運動時長結果與人工標定的金標準進行對比分析。
2.2.1 基于CoM的運動時長檢測結果與分析
自動檢測的ADHD兒童運動時長用T0~Tn表示,T0表示起始幀,Tn表示結束幀。金標準的ADHD兒童運動時長用T′0~T′n表示,T′0表示起始幀,T′n表示結束幀。圖9是T0~Tn和T′0~T′n的示意。在一個ADHD兒童視頻幀序列中,會存在沒有運動變化的圖像幀,ADHD兒童的運動變化是多段式的,則會存在i個T0~Tn和T′0~T′n。
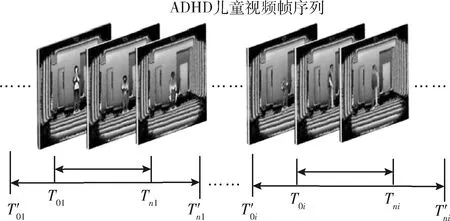
圖9 自動檢測的運動時長與金標準人工標注的運動時長
自動檢測出的ADHD兒童運動時長與金標準存在差異,需要評估本文提出的基于CoM的運動時長自動檢測算法的正確率。設Ui表示Ti0~Tin與T′i0~T′in的交集,ADHD兒童每一段運動變化的正確率Aci求解如式(15)所示
(15)
一個視頻幀序列的正確率Ac由各段運動變化的正確率求平均,如式(16)所示
(16)
分別將10個ADHD兒童的金標準運動時長和自動檢測的運動時長代入式(16)進行正確率的計算,得到的實驗結果見表1。
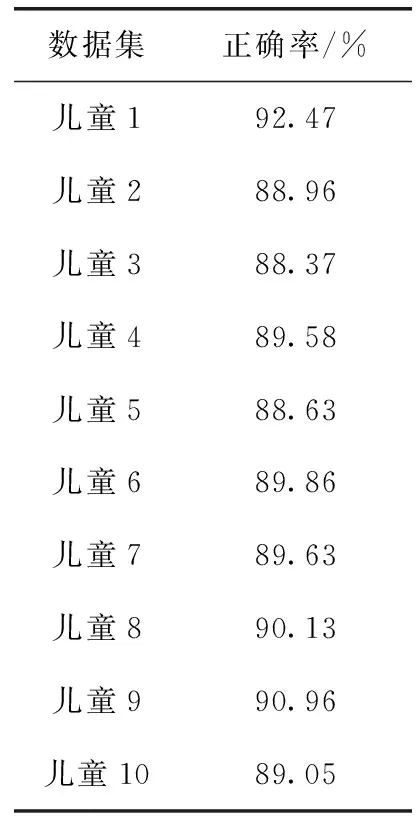
表1 基于CoM的ADHD兒童運動時長檢測結果正確率
表1展示了ADHD兒童運動時長的正確率,兒童1~兒童10的正確率在88.00%以上,實驗結果表明,本文提出的基于CoM的運動時長參數能夠在一定程度上反映ADHD兒童實際的運動時長,統計了ADHD兒童在做任務時的運動特征表現,能夠輔助臨床醫師對ADHD兒童的活動過動癥狀進行檢測。
2.2.2 基于CoM的ADHD兒童運動變化分析
本文提出基于CoM的運動時長特征,對每一幀圖像中的身體部位運動進行判斷,若任意一個身體部位發生運動變化則表示ADHD兒童發生了運動變化。
圖10是10個ADHD兒童的隨時間發生的運動變化示意,橫坐標表示的是時間,縱坐標表示的是ADHD兒童的運動變化。“0”表示ADHD兒童當前幀圖像未發生運動變化,“1”表示ADHD兒童當前幀圖像發生了運動變化。
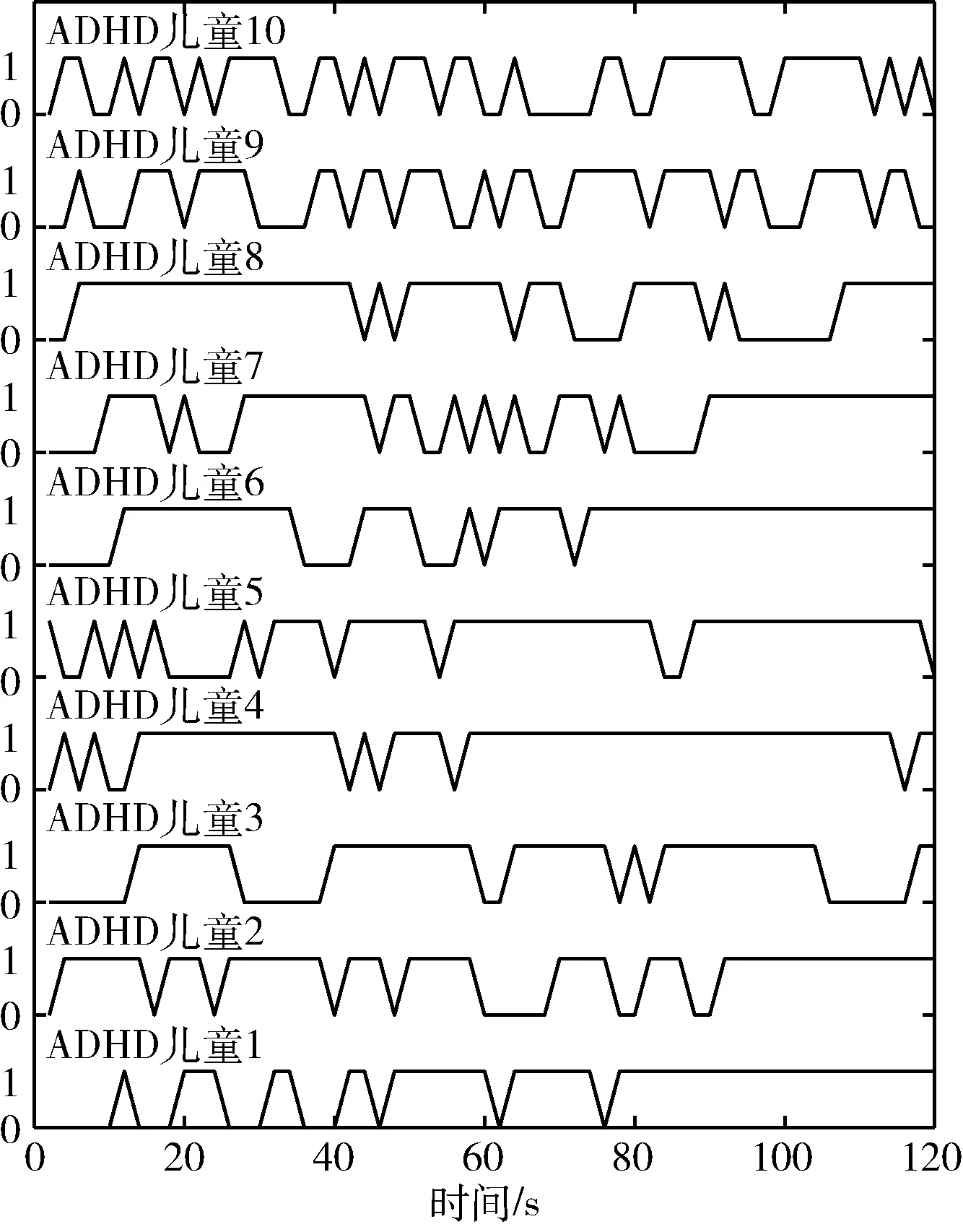
圖10 ADHD兒童隨時間的運動變化
當ADHD兒童的下一幀圖像與當前幀的圖像對比發生運動變化差異,則會出現曲線波動。10個ADHD兒童在要求靜站觀看同一個動畫片時,發生的運動變化不同,體現了個體的差異性。但是隨著時間的變化,ADHD兒童會隨著時間發生不同頻率的運動變化,只有少數時間能夠保持靜止。
臨床醫師可通過變化曲線觀察ADHD兒童的運動頻率,評估ADHD兒童的多動程度,對ADHD兒童的活動過動癥狀進行診斷。
2.3 基于DSST算法的人體目標區域自動檢測結果與分析
本文使用DSST算法對ADHD兒童的視頻數據進行目標區域定位跟蹤,得到ADHD兒童目標區域的跟蹤結果。圖11展示了利用DSST算法跟蹤ADHD兒童目標區域的結果,ADHD兒童目標區域用矩形框框出。
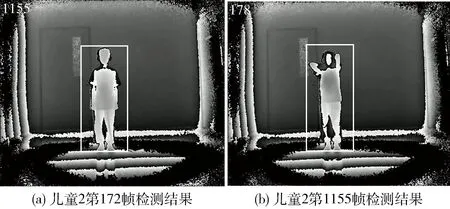
圖11 基于DSST算法的ADHD兒童目標區域定位檢測
圖11(a)是兒童2第172幀的檢測結果,圖11(b)是兒童2第1155幀的檢測結果,該兒童在完成指定任務時,身體上半部位發生了運動變化,他將雙手舉到頭頂且往左偏。DSST算法的跟蹤框也隨著左偏,實時跟蹤ADHD兒童目標區域。隨著ADHD兒童運動的變化,DSST算法能夠調整跟蹤框的比例來檢測ADHD兒童的目標區域。
為了對ADHD兒童目標區域的自動檢測效果進行評估,采取人工標記的方式,將圖像中ADHD兒童的邊界范圍以坐標點形式進行存儲作為金標準。通過對比基于DSST算法自動檢測的ADHD兒童目標區域的中心點坐標與該ADHD兒童目標區域的金標準中心點坐標,對該算法自動檢測結果進行判定,最終得到ADHD兒童目標區域的跟蹤正確率。
假設原始圖像上的ADHD兒童目標區域金標準坐標是 (xi,yi), 其i=1,2,3,4。 則得出式(17)的中心點坐標
(17)
基于DSST算法在原始圖像上自動檢測出ADHD兒童目標區域的標記框,用相同的方法計算出中心點坐標O′(u′,v′), 若基于DSST自動檢測算法標記產生的O′(u′,v′) 與金標準坐標O(u,v) 的中心點距離滿足關系式(18),則基于DSST算法的自動標記結果正確,不滿足式(18)則為標記有誤
(18)
式中:d表示中心點距離,L是判定中心點距離是否符合規范的閾值。在本實驗中,L取值5。本實驗對10個ADHD兒童視頻數據進行了目標區域自動檢測,同時對10個兒童的自動檢測結果進行了評估,評估結果見表2。
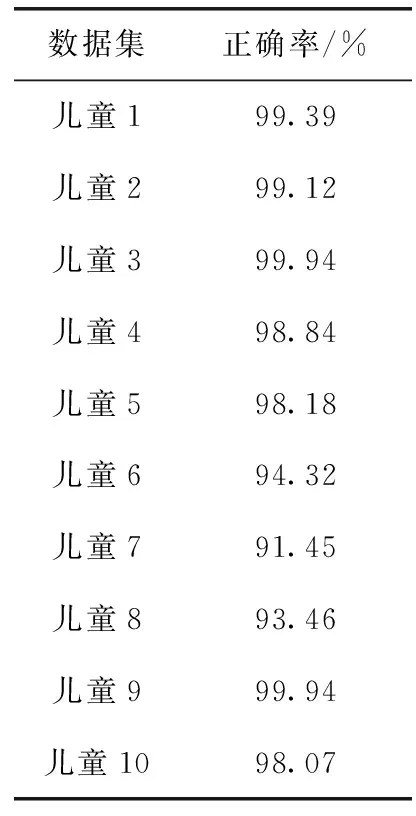
表2 基于DSST算法的人體目標區域自動檢測結果正確率
由表2可知,由于每個ADHD兒童視頻數據存在差異,自動檢測的正確率不相同。但是每個ADHD兒童目標區域的自動檢測正確率大于90%,具有較高的準確性,說明本文利用DSST算法能夠有效跟蹤本實驗的ADHD兒童目標區域。
2.4 本文ADHD兒童身體分割結果分析
本文基于ADHD兒童深度圖像中噪聲灰度信息及分布特征信息,提出了基于NLGD的去噪算法。利用基于NLGD的去噪算法處理ADHD兒童的目標區域,去除ADHD兒童周圍的噪聲,然后利用等值線算法提取連續完整的ADHD兒童身體邊緣,分割出ADHD兒童包含深度信息的身體區域。
圖12是本文的部分ADHD兒童目標區域分割前后示意圖。分割前不同ADHD兒童深度圖像的噪聲分布位置及影響兒童主體程度不一致,但他們的噪聲總體分布特點相似。ADHD兒童深度圖像中的噪聲分為兩大類:一是身體下半部分存在的波浪狀的“空洞”噪聲,二是身體邊緣鋸齒狀的跳動噪聲,影響ADHD兒童身體區域的分割。ADHD兒童目標區域經本文分割算法處理后,可以看到ADHD兒童身體下半部分的“波浪狀”噪聲被去除,ADHD的身體邊緣被保留,包含深度信息的ADHD兒童身體被分割出來,用于運動的量化。
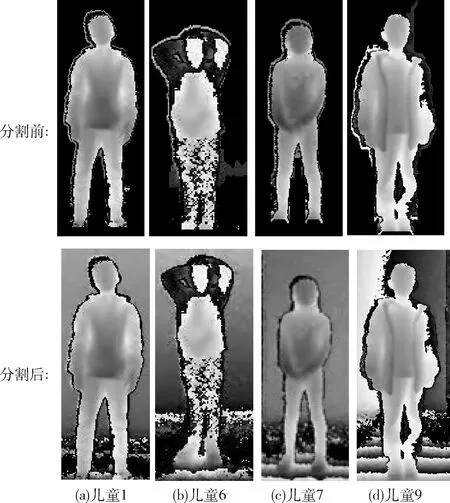
圖12 本文的部分ADHD兒童目標區域分割前后
為了評估本文提出的分割算法對ADHD身體區域的去噪性能,利用Dice系數[15](the dice similarity coefficient)、VOE系數(volumetric overlap error)、RVD系數(relative volume difference)作為評估ADHD兒童身體分割結果的指標。
Dice系數表示兩個物體相交的面積占總面積的比值,對本文分割算法提取的ADHD兒童身體區域與多人標記取平均標記的身體區域的重疊部分進行度量,代表本研究算法所提取身體區域與手動標記結果的相似度,完美分割時Dice系數的值為1,其公式如式(19)所示
(19)
VOE系數是體素重疊誤差,即ADHD兒童目標區域自動分割結果與標準分割結果差值與兩種結果總區域的比值,用來表示錯誤率,該值越小代表自動分割結果越好。其公式如式(20)所示
(20)
RVD系數是體素相對誤差,表示自動分割結果與手動標記結果之間體素的差異,其公式如式(21)所示
(21)
式(19)~式(21)中RS為手動標記的標準ADHD兒童身體區域結果,TS為本文分割算法處理得到的ADHD兒童身體區域結果。表3是對本研究的10個兒童視頻數據的測試結果。
由表3中參數可知,本文提出的分割算法對ADHD兒童身體區域分割結果的Dice系數在83.00%~92.72%的范圍內,平均識別正確率為88.65%,本實驗ADHD兒童身體區域的分割結果與手動標記金標準相似度高,且過識別率和欠識別率較低,說明了提出算法所得結果誤差較小,適用于本實驗不同兒童深度視頻數據的身體區域分割,利于對ADHD兒童進行運動量化。
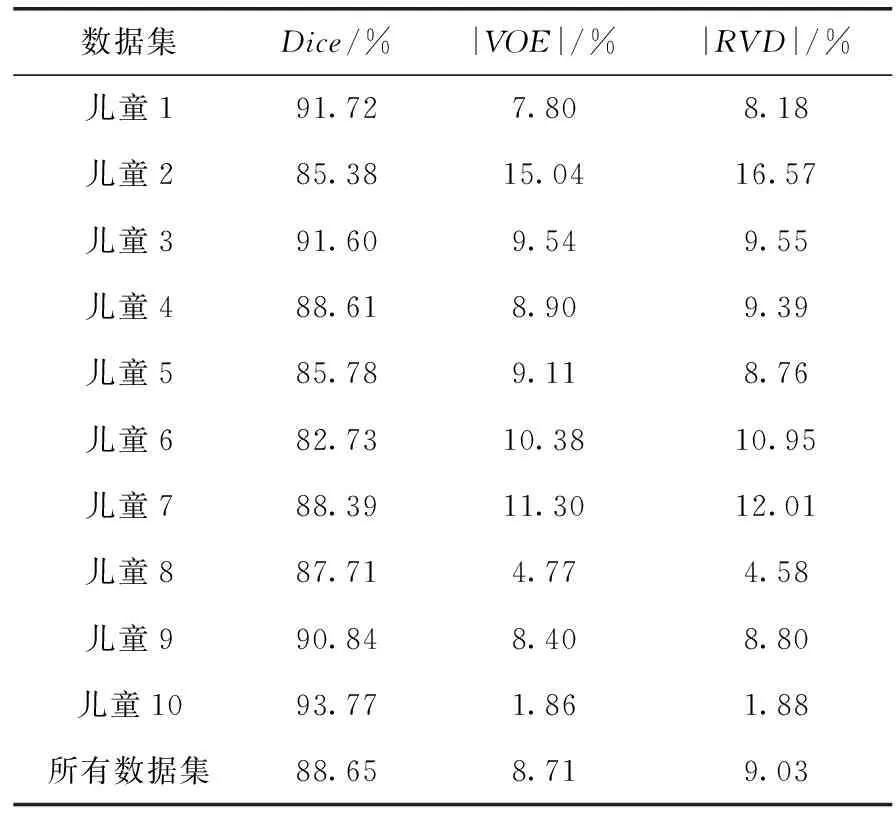
表3 本文提出的去噪算法性能測試結果
3 結束語
本文基于Kinect采集的ADHD兒童深度視頻提出了一種基于NLGD的深度圖像去噪方法,去除影響ADHD兒童深度圖像身體區域的噪聲。并且基于等值線算法分割出ADHD兒童身體區域。然后提出基于CoM的運動時長特征參數,自動量化ADHD兒童的運動。實驗對10個ADHD兒童的視頻數據進行目標自動跟蹤測試,去噪分割算法測試以及運動時長特征測試。對比分析了本文算法測試的實驗結果與金標準的差異,ADHD兒童目標自動跟蹤測試的正確率為91.45%~99.94%,基于本文去噪分割算法的ADHD兒童身體目標分割正確率為82.73%~93.77%,運動時長的正確率均為88.00%以上。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
少兒美術·書法版(2021年11期)2021-10-20 06:23:28
少兒美術·書法版(2021年8期)2021-10-20 06:08:10
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
雜文選刊(2016年7期)2016-08-02 08:39:56
小天使·一年級語數英綜合(2016年6期)2016-05-14 12:21:05
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
民生周刊(2012年10期)2012-10-14 09:06:46
