基于耦合電感的永磁同步電機(jī)容錯控制方法
2022-09-28 09:52:32王思仲賈文超
計算機(jī)仿真 2022年8期
王思仲,賈文超
(長春工業(yè)大學(xué)電氣與電子工程學(xué)院,吉林 長春 130012)
1 引言
永磁同步電機(jī)[1]在航空航天、艦船潛艇、汽車等領(lǐng)域具有廣泛應(yīng)用。近年來,由于日益嚴(yán)峻的環(huán)境能源問題,永磁同步電機(jī)的重要性備受關(guān)注且與日俱增。各相關(guān)領(lǐng)域?qū)τ来磐诫姍C(jī)的安全可靠性要求也越來越高,要求電機(jī)具有理想的容錯運(yùn)行能力[2],該能力指電機(jī)本體及其控制系統(tǒng)某個環(huán)節(jié)出現(xiàn)故障,則能夠利用設(shè)備冗余或采取合理的容錯控制措施,使電機(jī)仍舊可以保持穩(wěn)定運(yùn)行的一種能力。常見永磁同步電機(jī)優(yōu)點(diǎn)是高功率因數(shù)、高功率密度、高可靠性、良好的容錯能力。快速發(fā)展的微電子與現(xiàn)代電力電子技術(shù)推動了永磁同步電機(jī)容錯技術(shù)的更新升級,使系統(tǒng)安全可靠性受到越來越多的重視[3]。
文獻(xiàn)[4]針對永磁同步電機(jī)矢量控制系統(tǒng)中存在的電流傳感器故障問題,提出一種基于矢量旋轉(zhuǎn)的故障診斷方法。該方法基于不同軸定向的坐標(biāo)系,根據(jù)對應(yīng)的定子電流分量,對各相電流傳感器故障信息進(jìn)行判定,依據(jù)坐標(biāo)系下邏輯判斷機(jī)制,利用合適的反饋電流,重構(gòu)永磁同步電機(jī)矢量控制系統(tǒng),利用電流估計算法,防止反饋電流與指令值之間發(fā)生恒等于現(xiàn)象,確保出現(xiàn)故障后,電機(jī)仍可以平穩(wěn)運(yùn)行。該方法可有效對永磁同步電機(jī)故障進(jìn)行診斷,但該方法未過多考慮容錯問題,存在一定局限性。文獻(xiàn)[5]以電動汽車?yán)m(xù)航里程、安全可靠性以及運(yùn)行特性為優(yōu)化目標(biāo),構(gòu)建出一種電動車用的多盤式永磁同步電機(jī)協(xié)同優(yōu)化與容錯控制方法。該方法通過構(gòu)建多盤式永磁同步電機(jī)的數(shù)學(xué)模型,以效率MAP(Manifold Absolute Pressure Sensor,進(jìn)氣壓力傳感器)圖為基礎(chǔ),對效率優(yōu)化控制策略展開設(shè)計,分析電機(jī)的容錯控制性能,基于效率優(yōu)化,架構(gòu)出轉(zhuǎn)矩協(xié)同控制方法,通過模糊控制來改進(jìn)轉(zhuǎn)矩波動,實(shí)現(xiàn)容錯控制。但該方法在模糊控制中存在控制波動較大,難以提升永磁同步電機(jī)容錯能力。
基于上述傳統(tǒng)方法中存在的局限性,本文以耦合電感為研究基礎(chǔ),提出一種永磁同步電機(jī)容錯控制方法。耦合電感是指在兩個或以上的線圈內(nèi),當(dāng)各線圈生成的磁通均與另一個線圈相交,且是靜止?fàn)顟B(tài),線圈內(nèi)電阻與匝間的分布電容也可被忽略時,這些線圈將屬于一種理想化狀態(tài)的耦合電感元件。本文方法對提升電機(jī)轉(zhuǎn)矩輸出能力起著積極的推動作用;構(gòu)建耦合電感磁鏈模型,為后續(xù)容錯控制方法設(shè)計奠定基礎(chǔ);通過取得極大程度幅值的輸出轉(zhuǎn)矩,賦予推進(jìn)系統(tǒng)較大的輸出功率與調(diào)速范圍,降低對電機(jī)正常運(yùn)行的干擾,令電機(jī)原本作用得到充分發(fā)揮;增設(shè)對應(yīng)且合理的約束方程,使方程組解具有唯一性,提升容錯控制效果。與傳統(tǒng)方法相比具有一定優(yōu)勢。
2 永磁同步電機(jī)耦合磁鏈模型構(gòu)建
永磁同步電機(jī)的磁鏈中存在磁路交叉耦合電感,而產(chǎn)生的交叉耦合效用將直接影響電磁轉(zhuǎn)矩[6-7],且電機(jī)轉(zhuǎn)矩越大,影響力越強(qiáng)。所以,以永磁同步電機(jī)處于大轉(zhuǎn)矩運(yùn)行狀態(tài)為前提,構(gòu)建出耦合電感下的磁鏈模型,為后續(xù)容錯控制方法設(shè)計奠定基礎(chǔ)。
不失一般性,永磁同步電機(jī)的d、q軸磁鏈模型常用下列表達(dá)式描述
(1)
式中,d、q軸磁鏈用ψd、ψq表示,d、q軸電流用id、iq表示,其電感用Ld、Lq表示,永磁體生成磁鏈用ψpm表示。
采用下列計算公式求取電磁轉(zhuǎn)矩Tem

(2)

若忽略磁路飽和狀態(tài),則電感Ld、Lq與永磁體生成磁鏈ψpm均為常數(shù);反之,若將磁路飽和情況作為考慮因素,則電感Ld、Lq是電流id、iq的函數(shù)。
基于永磁同步電機(jī)交叉耦合作用[8],改寫式(1)為
(3)
式中,對于d軸,其電流生成的自感磁鏈為ψdd,由于交叉耦合生成的q軸磁鏈為ψqd;同理,對于q軸的自感磁鏈與d軸磁鏈分別為ψqq、ψdq;磁路飽和會導(dǎo)致永磁體磁路不對稱,此時得到的d、q軸磁鏈分量分別為ψd,pm、ψq,pm。
將式(3)磁鏈方程用電流、電感等參數(shù)加以描述,得出下列表達(dá)式

(4)
式中,d軸自感與q軸交叉耦合電感分別用Ldd、Lqd表示,q軸自然與d軸交叉耦合電感分別用Lqq、Ldq表示。
整理合并上式與電磁轉(zhuǎn)矩Tem計算公式,推導(dǎo)出下列交叉耦合電磁轉(zhuǎn)矩表達(dá)式為

(5)
式中,永磁轉(zhuǎn)矩為Tpm,不失一般性的磁阻轉(zhuǎn)矩與交叉耦合產(chǎn)生的磁阻轉(zhuǎn)矩分別是Trel1、Trel2,兩者之和即為總磁阻轉(zhuǎn)矩Trel。
3 永磁同步電機(jī)容錯控制
基于構(gòu)建的耦合磁鏈模型,研究永磁同步電機(jī)的容錯控制方法,既要確保容錯運(yùn)行狀態(tài)下電機(jī)輸出轉(zhuǎn)矩穩(wěn)定,還需控制輸出轉(zhuǎn)矩脈動保持在盡可能小范圍內(nèi)。通過取得極大程度幅值的輸出轉(zhuǎn)矩,賦予推進(jìn)系統(tǒng)較大的輸出功率與調(diào)速范圍,降低對電機(jī)正常運(yùn)行的干擾,令電機(jī)原本作用得到充分發(fā)揮。
電機(jī)出現(xiàn)故障后,在耦合電感影響下,合理調(diào)整故障后電機(jī)剩余的正常電流矢量幅值與相位。經(jīng)過容錯控制后隨時間變化,電機(jī)各相繞組通入電流矢量的瞬時表達(dá)式:
(6)
式中,故障運(yùn)行狀態(tài)下接入的電機(jī)定子繞組電流幅值是Im,經(jīng)過容錯控制調(diào)整,與電流矢量ie、if、ig、ih相對應(yīng)的空間重分布相位值分別是β、γ、δ、ε。
若令故障前后磁動勢不變,要在電機(jī)出現(xiàn)A相繞組開路故障時保證電機(jī)圓形旋轉(zhuǎn)磁勢在故障前后不發(fā)生改變。因此,為達(dá)到該控制目的,使電機(jī)其它能夠正常運(yùn)行的各相繞組磁動勢等同于正常運(yùn)行的電機(jī),且令下列所示的圓形旋轉(zhuǎn)磁場生成條件成立,即

(7)

采用三角函數(shù)[9-10]將上式指數(shù)表達(dá)式改寫成復(fù)數(shù)形式,使等號兩邊虛實(shí)一致,表達(dá)式為

(8)

(9)
通過上列兩個方程式可以看出,其構(gòu)成方程組的解不具有唯一性,需增設(shè)對應(yīng)且合理的約束方程。
令∑im(t)=0,防止單相開路故障的容錯控制連接永磁同步電機(jī)中線,故設(shè)立下列約束條件為
ie+if+ig+ih=0
(10)
β+γ=π
(11)
令各相電流瞬時表達(dá)式具有相同幅值,以確保空間中的電機(jī)各相繞組電流矢量呈對稱分布,且能夠?yàn)橄到y(tǒng)提供電力[11]。因此,將下列各式設(shè)定為電機(jī)出現(xiàn)A相繞組開路故障的約束條件
ie=-ig
(12)
if=-ih
(13)
通過結(jié)合上述兩個約束條件,將經(jīng)過容錯控制的電機(jī)各相繞組接入電流,用下列表達(dá)式進(jìn)行描述

(14)
由以上各式,綜合計算上式方程組后,得到下列容錯運(yùn)行過程中,隨時間變化的各相電流矢量瞬時[12]表達(dá)式

(15)
根據(jù)上列方程組可知,當(dāng)發(fā)生A相繞組開路故障時,利用電流容錯控制方法,可適當(dāng)調(diào)整其它各相電流矢量幅值與相位,重新分布空間相位,且符合圓形旋轉(zhuǎn)磁場的必要條件。
4 仿真分析
4.1 實(shí)驗(yàn)環(huán)境及參數(shù)
為驗(yàn)證所提方法的有效性,進(jìn)行仿真分析。采取130BH55E型號的五相混合式永磁同步電機(jī),在MALTAB平臺上進(jìn)行,實(shí)現(xiàn)操作系統(tǒng)為WINDOWS XP,運(yùn)行內(nèi)存為8GB,CPU 為3.6 GHz,實(shí)驗(yàn)用電機(jī)參數(shù)如表1所示。

表1 混合式永磁同步電機(jī)參數(shù)
4.2 實(shí)驗(yàn)結(jié)果分析
4.2.1 碼道故障分析
為驗(yàn)證所提方法的有效性,實(shí)驗(yàn)分析了所提方法的對電機(jī)碼道故障分析,實(shí)驗(yàn)結(jié)果如圖1 所示。
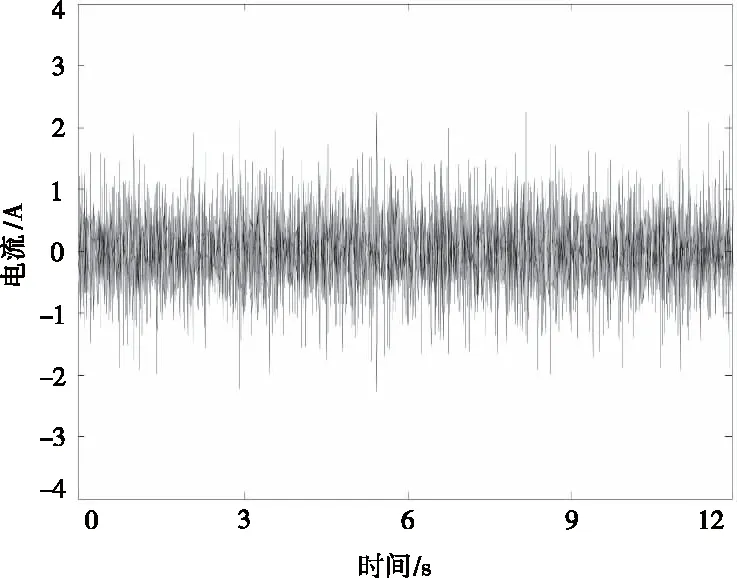
圖1 容錯控制效果
分析圖1結(jié)果可以看出,實(shí)驗(yàn)中電機(jī)的定子電波形比較穩(wěn)定,這是由于所提方法結(jié)合了永磁同步電機(jī)的交叉耦合作用,利用磁鏈模型取得了交叉耦合電磁轉(zhuǎn)矩,根據(jù)得到的極大程度幅值輸出轉(zhuǎn)矩,將較大的輸出功率與調(diào)速范圍賦予推進(jìn)系統(tǒng),并增設(shè)了合理的約束方程,使構(gòu)建的方程組解值具有唯一性,令各相電流瞬時表達(dá)式具有相同幅值,因此,本文方法有效檢測并處理了電機(jī)故障,抑制了碼道故障產(chǎn)生的影響。綜上所述,說明本文方法具有一定的穩(wěn)定性與魯棒性。
4.2.2 斷路故障分析
設(shè)定5rad/s是定期望轉(zhuǎn)速,若條件概率變化率取值0.999,則短路故障下的轉(zhuǎn)速預(yù)估準(zhǔn)確率是73.7%,轉(zhuǎn)速采集準(zhǔn)確率約是67%,則斷路故障下的容錯控制效果如圖2所示。

圖2 容錯控制效果
從波形圖中可以看出,本文控制方法對斷路故障具有有效性,可以準(zhǔn)確檢測出斷路故障的故障種類,通過過濾了轉(zhuǎn)速采樣周期中的數(shù)據(jù)壞點(diǎn),成功判定該故障為斷路故障,經(jīng)過令故障前后磁動勢不變,使電機(jī)其它能夠正常運(yùn)行的各相繞組磁動勢等同于正常運(yùn)行的電機(jī),且滿足圓形旋轉(zhuǎn)磁場生成條件,防止單相開路故障的容錯控制連接永磁同步電機(jī)中線,空間中的電機(jī)各相繞組電流矢量呈對稱分布的同時為系統(tǒng)提供電力,所以,控制效果較好。這說明本文控制方法可有效抑制斷路引發(fā)的震蕩影響,具有可行性與有效性。
4.2.3 有限元模擬分析
為進(jìn)一步驗(yàn)證所提方法的有效性,實(shí)驗(yàn)采用有限元分析軟件ansoft模擬電機(jī)本體,獲取更精準(zhǔn)的控制結(jié)果。取得實(shí)驗(yàn)用電機(jī)的空載反電勢波形,通過諧波分析,得到反電勢諧波分量與基波分量比。如圖3 所示。

圖3 電機(jī)空載反電勢波形與諧波分析
假設(shè)電機(jī)各相電流在正常運(yùn)行狀態(tài)下的幅值為6A,電機(jī)轉(zhuǎn)速是500 r/min,有限元仿真分析不同容錯控制方法的效果,各方法對應(yīng)的電磁轉(zhuǎn)矩曲線如圖4所示。

圖4 有限元仿真結(jié)果
通過分析圖4可以看出,本文方法因考慮了永磁同步電機(jī)的交叉耦合作用,構(gòu)建了用電流、電感等參數(shù)描述的磁鏈模型與交叉耦合電磁轉(zhuǎn)矩模型,分析了耦合電感,既確保了容錯運(yùn)行狀態(tài)下電機(jī)穩(wěn)定輸出轉(zhuǎn)矩,還將輸出轉(zhuǎn)矩脈動控制在了盡可能小的范圍內(nèi),降低了對電機(jī)正常運(yùn)行的干擾,令電機(jī)原本作用得到充分發(fā)揮,基于耦合電感,合理調(diào)整故障后電機(jī)剩余的正常電流矢量幅值與相位,使電機(jī)圓形旋轉(zhuǎn)磁勢在故障前后不發(fā)生改變,因此,相對比文獻(xiàn)[4]、[5]方法,具有更理想的容錯控制效果,電機(jī)運(yùn)行更加平穩(wěn)。
5 結(jié)論
電力電子技術(shù)穩(wěn)步發(fā)展,使電機(jī)日益打破供電相數(shù)的局限,為電機(jī)后續(xù)的深入研究與應(yīng)用領(lǐng)域擴(kuò)展奠定了基礎(chǔ)。其中,永磁同步電機(jī)就憑借其高能量密度等諸多優(yōu)勢,廣泛應(yīng)用于航空航天等各大領(lǐng)域。本文以永磁同步電機(jī)為研究對象,提出一種耦合電感的容錯控制方法。該方法通過構(gòu)建永磁同步電機(jī)耦合磁鏈模型,以及合理調(diào)整故障后電機(jī)剩余正常電流矢量幅值與相位,令電機(jī)能夠正常運(yùn)行的各相繞組磁動勢等同于正常運(yùn)行的電機(jī)。驗(yàn)證了控制方法的有效性,具有一定優(yōu)勢性能。
但因個人能力等局限性,方法中存在遺漏與缺失,應(yīng)在今后的工作中繼續(xù)深入探索,令容錯控制方法更加完善;應(yīng)以電機(jī)矢量容錯控制為研究視角,檢驗(yàn)控制方法的精準(zhǔn)度;應(yīng)在模擬實(shí)驗(yàn)過程中,針對性地對其它多相電機(jī)故障容錯控制方法展開探析,考察本文控制方法的適用性;故障狀態(tài)較多,本文只考慮了幾種常見故障,下一步應(yīng)對其它故障狀態(tài)的對應(yīng)檢測方法與容錯控制方法進(jìn)行研究。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
兒童故事畫報(2019年5期)2019-05-26 14:26:14
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
