葉形孔視覺測量系統設計
2022-09-21 11:14:48周鵬盛波胡成海畢超郝雪
機床與液壓 2022年4期
周鵬,盛波,胡成海,畢超,郝雪
(1.北京航空精密機械研究所精密制造技術航空科技重點實驗室,北京 100076;2.中國航發南方工業有限公司科技工程部,湖南株洲 412002)
0 前言
航空發動機的靜子組件是航空發動機燃氣導向部件中的關鍵零件。靜子組件為內外多層結構,內外環為圓環狀的薄壁結構,在靜子安裝外環、內環壁面間圓周方向均勻分布多個葉形孔,葉形孔的位置度和輪廓度都有公差要求。在靜子組件和葉片的安裝中,靜子葉片插裝在三級靜子外環和三級靜子內環的葉形孔中,然后通過焊接的方法將葉片固定在靜子組件上,并且焊接時要保證葉片與葉形孔縫隙均勻以保證焊接強度。葉形孔多采用激光切割方法加工,由于激光系統的長期使用,其加工精度無法得到保證。傳統的葉形孔標準樣件法是將標準葉片插入實際葉形孔中,然后用燈光照射葉形孔,根據葉片標準樣件與葉形孔之間的漏光間隙大小估計葉形孔的輪廓誤差。標準樣件檢測法雖然具有操作簡單、檢測快速等優點。但是只能定性分析葉形孔是否合格,無法給出誤差值。三坐標測量機測量方法是檢測精度比較高的葉形孔測量方法,其測量原理是通過測頭測出葉形孔輪廓上各測點的坐標值,然后通過建模求出葉形孔的位置誤差和輪廓度誤差。三坐標測量機只能用于測量尺寸比較大的葉形孔,且對于測頭的大小有要求,不適合小尺寸葉形孔測量。
隨著航空發動機對靜子組件性能的要求越來越高,迫切需要研制和開發出高效的葉形孔檢測裝置。隨著圖像處理技術的高速發展,機器視覺測量技術被廣泛應用于航空各領域。機器視覺測量是通過工業相機采集圖像信息到PC機上,通過圖像處理算法求得待測物的尺寸位置等信息。機器視覺測量作為非接觸測量方法,具有成本低、操作簡單和實時性強等特點,被廣泛應用于工業現場測量。
本文作者基于機器視覺的方法,設計航空發動機靜子組件葉形孔的測量系統,實現對葉形孔邊緣坐標的提取。
1 葉形孔幾何特征
靜子組件裝配孔形面具有以下3個特點:(1)葉形孔形面輪廓線由多段不同參數的弧線組成,靜子葉片插入內外環葉形孔后,通過釬焊固定,但是釬焊必然會產生毛細血管作用且釬料不漫流,所以葉片與葉形孔間要保持適當、均勻的間隙,因此要求葉形孔輪廓度為0.08~0.1 mm;(2)為保持氣動性能,葉形孔必須均布在內外環軸線方向上,且葉形孔在一周均布有位置度0.08~0.15 mm的要求;(3)形面進排氣邊部位的半徑非常小,靜子件的進排氣邊轉接半徑約為0.2 mm。葉形孔如圖1所示,航空發動機靜子組件如圖2所示。

圖1 葉形孔

圖2 航空發動機靜子組件
2 測量系統方案
系統由三軸運動平臺、高精度氣浮轉臺、工業相機、二維姿態調整機構、光源、圖像處理軟件和上位機組成,如圖3所示。
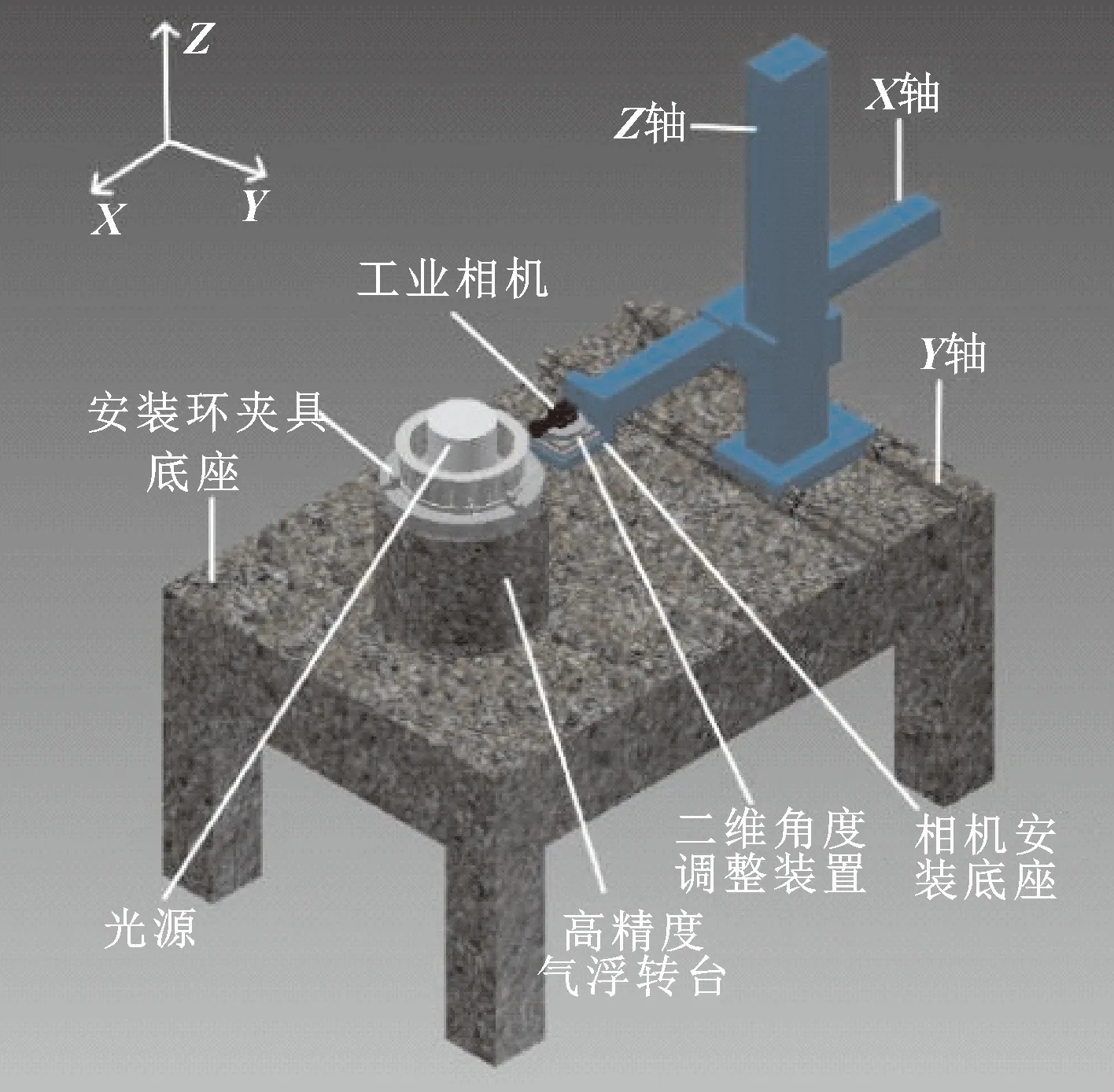
圖3 測量裝置組成部分
將3個二維姿態調整機構組成1個三維姿態調整機構(可以實現相機繞軸和軸擺動、繞軸360°旋轉),將此三維姿態調整機構固定到三軸運動裝置的末端(即軸的前端),相機固定在三維姿態調整機構上。在三軸運動機構的大理石平面上安裝高精度氣浮轉臺,將待測工件通過專用夾具固定在轉臺上,工件可以隨著轉臺一起轉動。通過上位機軟件控制三軸運動裝置和高精度氣浮轉臺運動,使葉形孔完整清晰成像在相機的CMOS上,然后相機將圖像傳輸給上位機,在上位機上求出葉形孔邊緣在圖像上的坐標。
2.1 多軸運動裝置
葉形孔測量系統的運動機構由、和3個直線軸和1個與軸平行的回轉軸構成。其中、和軸是三軸運動裝置的3個直線軸,而回轉軸是由單獨布置在三軸運動裝置大理石平臺上的高精度氣浮轉臺實現。三維姿態調整機構和相機安裝在軸的前端。相機可以單獨沿著、和軸運動,或者可以三軸聯動,實現相機在、、構成的直角坐標系內任意一點的精確定位。
三軸運動裝置的軸行程600 mm、軸行程400 mm、軸行程400 mm,各軸光柵尺的分辨率為0.5 μm,測量不確定度為(2.5+3×/1 000) μm(為測量長度)、重復定位精度為2.8 μm。
旋轉軸的高精度氣浮轉臺采用某公司的SGMCS型直接驅動伺服電機,該型電機可以在不帶減速器的狀態下直接驅動負載,實現從低速至高速的強力平滑運行。電機采用20位高分辨率編碼器,可滿足被測量器件精確定位的需求。
2.2 多軸測量控制系統
多軸測量控制系統是控制、、軸和旋轉軸精確運動到設定位置的關鍵。本文作者提出基于PMAC的多軸運動控制系統的技術方案。該方案采用主流工控PC機(上位機)與專用多軸運動軸控及數據采集系統(下位機)相結合的二級位置閉環數字復合控制結構。這樣,下位機控制更具實時性,同時上位機也能夠更有效地實時反饋,從而提高整個測量系統的工作效率。控制系統結構如圖4所示。

圖4 控制系統技術方案
2.3 圖像采集裝置
圖像采集裝置包括遠心鏡頭、工業相機和LED光源。圖像采集裝置的質量決定了成像質量,從而決定系統最終的精度,所以圖像采集裝置的選型、照明方式以及安裝方式至關重要。
相機選取大恒水星二代MER系列工業面陣黑白數字相機,它具有高清晰度、低噪聲、安裝及使用方便等特點。相機性能參數見表1。
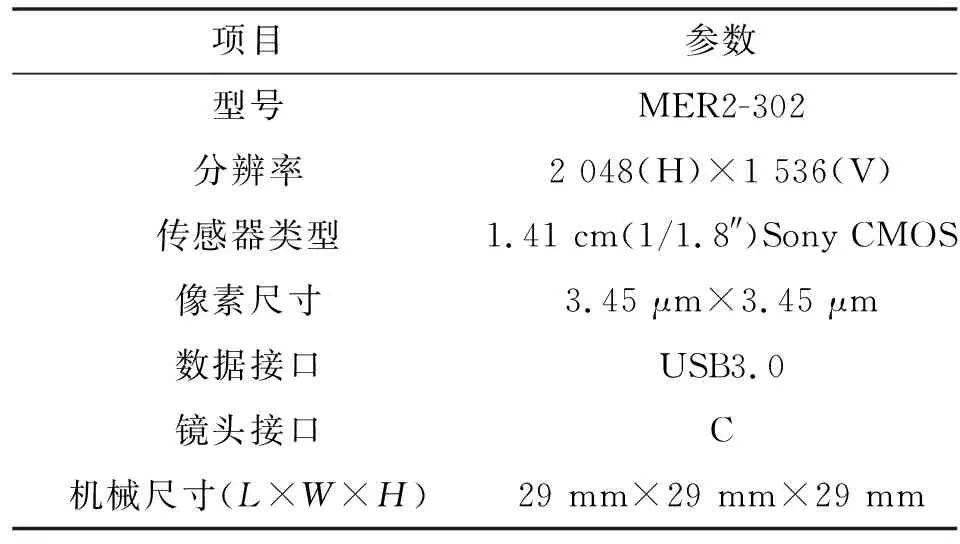
表1 相機性能參數
若被測物與相機之間的距離發生變化,則CMOS中一個像素對應的實際距離會發生變化,所以在鏡頭選型時要選用遠心鏡頭。遠心鏡頭只允許平行光進入,所以被測物與相機之間距離發生變化不會影響CMOS中單個像素與實際距離之間的關系。靜子組件的葉形孔的尺寸為29 mm×21 mm,而CMOS對角線長度為9.00 mm,長、寬分別為7.20、5.35 mm(CMOS尺寸為1.41 cm(1/1.8″)),選擇鏡頭倍率為0.23的鏡頭,且鏡頭的靶面尺寸要大于CMOS的尺寸才可以使葉形孔完整成像在相機的CMOS上。選擇的鏡頭型號為Myutron MGTL023,其性能參數見表2。

表2 鏡頭性能參數
該系統只是用于采集葉形孔的輪廓特征,所以光源采用LED背光光源。將LED光源放置在氣浮轉臺上的航空發動機靜子組件環內,光線通過葉形孔進入相機,可以很好地將葉形孔輪廓成像在CMOS上。
2.4 圖像處理
相機采集到的葉形孔圖像通過USB接口傳輸到PC機上,在PC機中對采集到的圖像進行中值濾波、二值化、區域選擇、圖像的形態學處理、亞像素邊緣提取和邊緣坐標提取等操作。
對相機采集到的原圖(見圖5)進行中值濾波,得到中值濾波圖像。中值濾波對于濾除圖像的脈沖噪聲及圖像掃描噪聲最有效,還可以克服線性濾波器帶來的圖像細節模糊的影響。用中值濾波器濾除葉形孔圖像中孤立的雜點,為后續的邊緣提取濾除假邊緣,提高邊緣提取精度。將中值濾波后的圖像進行二值化處理,得到二值化圖像。由于輸入的圖像背景與前景分明,所以圖像二值化采用的是全局閾值處理方法,閾值為128,全局閾值計算簡單、快速。然后分離前景區域,把前景每一個聯通的區域劃分成一個前景子區域,得到前景子區域集合圖像。得到每一個前景子區域后,按面積特征選擇所需要的子區域(即一個完整葉形孔的前景區域),得到完整的葉形孔區域圖像。對得到的前景子區域進行膨脹處理,將子區域向外擴張,得到膨脹圖像,防止在進行圖像二值化時把邊緣區域當作背景,以至于在后面搜索邊緣時搜索到錯誤的邊緣。通過Canny算子在膨脹后的區域中進行輪廓提取,獲得圖像中目標區域的二維輪廓,最后求出葉形孔輪廓邊緣的坐標值,得到邊緣圖像,如圖6所示。

圖5 葉形孔原圖 圖6 葉形孔邊緣
在比較標準葉形孔和實際測得葉形孔前,需要將標準輪廓的坐標值轉換到圖像坐標下。已知相機像元的大小為3.45 μm、鏡頭倍率為0.23×,可將坐標轉換到圖像坐標下。由標準葉形孔輪廓坐標點生成葉形孔區域,將標準葉形孔區域和實際測得葉形孔區域進行形狀模板匹配,得到剛性變換矩陣如式(1)所示。通過剛性變換矩陣對標準輪廓坐標點進行變換,變換公式如式(2)所示,使理論輪廓曲線的內外等距線對曲線的包容區域達到最小狀態。經過剛體變換后實際輪廓線和理論輪廓線見圖7。
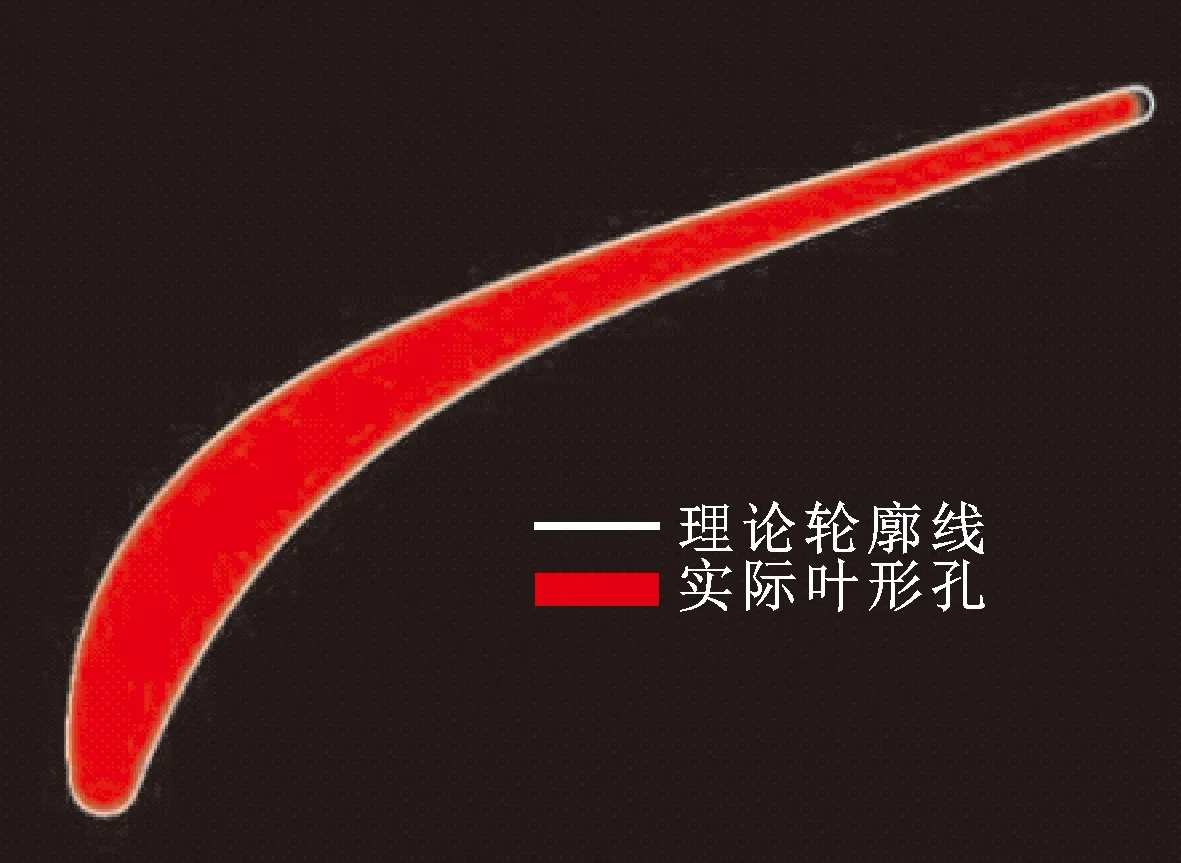
圖7 標準輪廓和實際輪廓
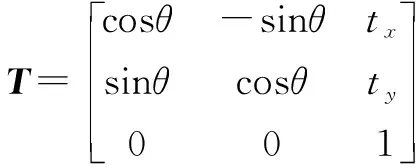
(1)
(2)
根據輪廓度測量中的最小包容區域的定義,對實際輪廓進行剛體變換,使其滿足最小包容區域的定義,從而將線輪廓度誤差的評定問題轉化為對進行剛體變換后的曲線求解最小單向豪斯多夫距離的問題,且最小單向豪斯多夫距離為兩包絡線之間法向距離的1/2。
2.5 上位機軟件
葉形孔視覺測量系統的上位機是整個系統的控制終端,其功能包括控制四軸運動機構運動、顯示4個軸的位置坐標、連接工業相機并采集圖像、圖像處理、與下位機通信和相機標定。
上位機用戶界面如圖8所示,界面分為4個功能區:功能區1實時顯示相機采集到的圖像;功能區2控制四軸運動以及實時顯示4個軸的位置坐標;功能區3用于顯示經過一系列圖像處理完成后的圖像;功能區4具有連接相機、采集圖像、設置圖像處理相關參數、處理圖像、保存圖像和相機標定等功能。

圖8 上位機界面
3 實驗過程
具體實驗步驟如下:首先,通過三維調整裝置調整工業相機的空間方位,使其成像光軸的方向與測量系統的軸方向平行;其次,對高精度氣浮轉臺的回轉軸線進行標定,將定制的長方體標定塊放在氣浮轉臺上,使工業相機對焦在標定塊的表面,沿軸方向移動工業相機,使相機采集到標定塊鋒利的邊緣,通過邊緣提取、像素距離轉換為實際距離等步驟,最終確定回轉軸線在機器坐標系的空間方位;然后,將航空發動機靜子組件固定在氣浮轉臺的專用夾具上,通過控制氣浮轉臺旋轉,使葉形孔正對著工業相機,同時通過調整、和軸使工業相機對準葉形孔,使葉形孔完整、清晰成像在相機上;當圖像采集裝置部分調整完畢之后,需要在上位機上點擊圖像采集按鈕,工業相機將采集到的圖像通過USB3.0傳輸到上位機,上位機通過調用在Halcon上寫好的圖像處理算法,提取葉形孔的邊緣以及邊緣坐標,將標準葉形孔輪廓和實際葉形輪廓進行模板匹配,得到剛性變換矩陣,對標準輪廓坐標點進行剛性變換,最后計算Hausdoff距離;當一個葉形孔測量完成,控制氣浮轉臺旋轉,使靜子組件的下一個葉形孔完整成像在CMOS上,重復上面的圖像處理環節,直至整個靜子組件的所有葉形孔測量完畢。實驗流程如圖9所示。葉形孔測量系統如圖10所示。
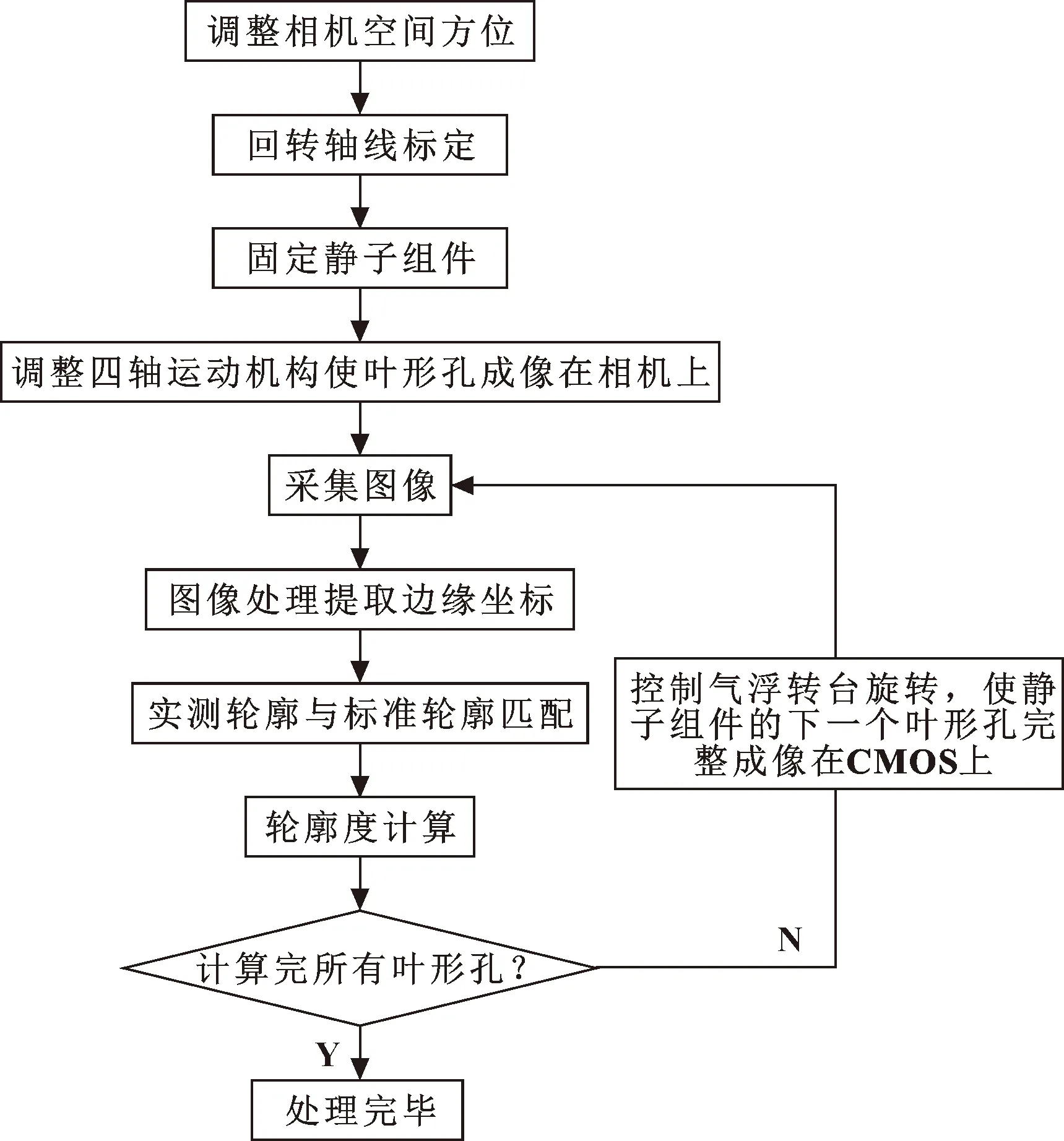
圖9 實驗流程
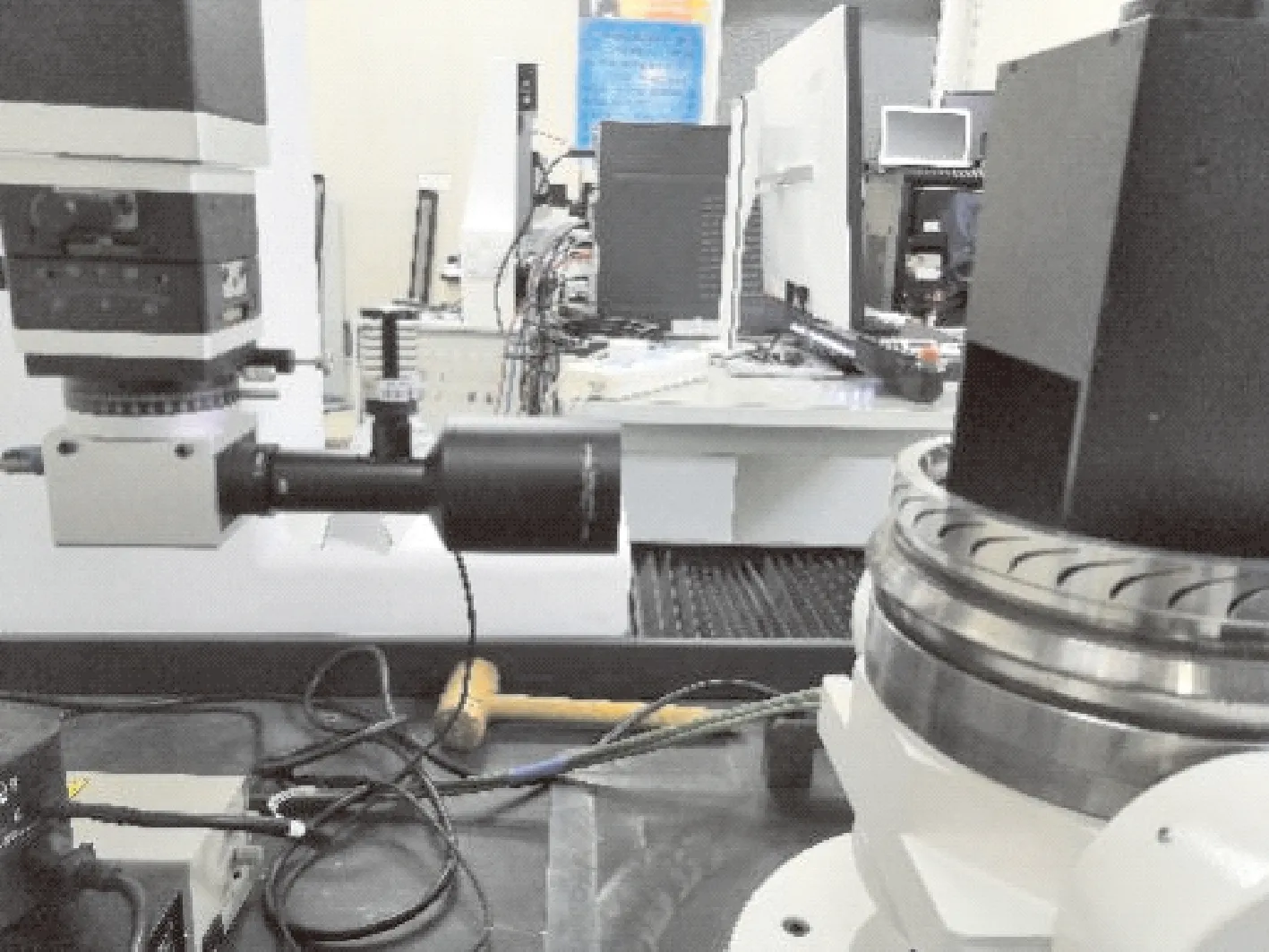
圖10 葉形孔測量系統
4 結論
本文作者應用三軸運動機構、高精度氣浮轉臺、工業相機和工控機等搭建航空發動機靜子組件上的葉形孔測量系統,實現了對葉形孔的線輪廓度高精度測量。該系統采用機器視覺方法進行測量,具有實時性、非接觸性、測量方便和價格便宜等特點。相對于傳統的檢測方法(例如標準工件參考法、三坐標測量機法),它不僅提高了檢測精度,還提高了檢測速度,降低了靜子組件轉入焊接車間后多次產生不滿足零件尺寸的概率,提高了生產效率,滿足航空發動機零件高精度生產的要求。該系統不僅可以用于葉形孔測量,還可以用于緊固件的測量。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52
