基于EEMD與GWO-MCKD的門(mén)座起重機(jī)回轉(zhuǎn)支承故障診斷
2022-09-18 08:16:40曾耀傳林云樹(shù)吳曉梅
機(jī)床與液壓 2022年7期
曾耀傳 ,林云樹(shù) ,吳曉梅
(1.福建省特種設(shè)備檢驗(yàn)研究院,福建福州 350008;2.福州大學(xué)機(jī)械工程及自動(dòng)化學(xué)院,福建福州 350108)
0 前言
回轉(zhuǎn)支承是一種特殊的大型滾動(dòng)軸承,廣泛應(yīng)用于各種大型機(jī)械,例如港口的門(mén)座起重機(jī)。門(mén)座起重機(jī)回轉(zhuǎn)支承在工作狀態(tài)時(shí)各部分的受力不均以及運(yùn)動(dòng)狀態(tài)復(fù)雜,并且由于低速重載的運(yùn)行特點(diǎn)和大量的背景噪聲,使得原本因故障產(chǎn)生的沖擊淹沒(méi)在背景噪聲里,因此故障特征的提取比一般中高速軸承難。然而,在門(mén)座起重機(jī)的長(zhǎng)期使用中,回轉(zhuǎn)支承故障是難免的。如果不能及時(shí)發(fā)現(xiàn)這些故障并做出應(yīng)對(duì)措施,將會(huì)影響門(mén)座起重機(jī)的正常運(yùn)轉(zhuǎn),同時(shí)導(dǎo)致巨大的經(jīng)濟(jì)損失。
目前,少部分研究人員對(duì)回轉(zhuǎn)支承故障診斷展開(kāi)了研究并取得初步成果。呂學(xué)昭采用小波分解和極值域均值模態(tài)分解的復(fù)合方法對(duì)門(mén)座起重機(jī)回轉(zhuǎn)支承進(jìn)行故障診斷,然而小波分解中小波基與分解層數(shù)無(wú)法自適應(yīng)選取。南京工業(yè)大學(xué)針對(duì)回轉(zhuǎn)支承故障診斷做了較多的研究,將圓域分析、小波能量模式、雙譜分析、峭度概率密度分析、加權(quán)融合算法、概率主成分分析等方法應(yīng)用于實(shí)驗(yàn)臺(tái)回轉(zhuǎn)支承振動(dòng)信號(hào)的降噪和特征提取,同時(shí)還將支持向量機(jī)、BP神經(jīng)網(wǎng)絡(luò)等機(jī)器學(xué)習(xí)方法應(yīng)用于實(shí)驗(yàn)臺(tái)回轉(zhuǎn)支承的故障診斷和壽命預(yù)測(cè),但因其數(shù)據(jù)來(lái)自于實(shí)驗(yàn)臺(tái),且故障是人為加工所形成的,與現(xiàn)場(chǎng)實(shí)際故障有一定的區(qū)別。
基于振動(dòng)的信號(hào)處理方法是回轉(zhuǎn)支承故障診斷最常用的方法之一。回轉(zhuǎn)支承的振動(dòng)信號(hào)具有非線性、非平穩(wěn)特征,故無(wú)法直接從原始信號(hào)中提取到故障特征,因此需對(duì)它進(jìn)行處理。然而,信號(hào)處理方法眾多,選擇一種合適的方法對(duì)回轉(zhuǎn)支承信號(hào)處理至關(guān)重要。經(jīng)驗(yàn)?zāi)B(tài)分解(Empirical Mode Decomposition,EMD)無(wú)需預(yù)設(shè)基函數(shù),只根據(jù)自身時(shí)間尺度上的特征來(lái)分解信號(hào),是一種具有很強(qiáng)自適應(yīng)能力的信號(hào)處理方法。它的主要缺點(diǎn)是模態(tài)混疊問(wèn)題。EEMD(Ensemble Empirical Mode Decomposition)克服了上述方法的局限性,并且有許多以往成功應(yīng)用于旋轉(zhuǎn)機(jī)械故障診斷的實(shí)例,因此本文作者選擇EEMD作為門(mén)座起重機(jī)回轉(zhuǎn)支承信號(hào)的處理方法。
回轉(zhuǎn)支承的振動(dòng)信號(hào)中往往伴隨著巨大的環(huán)境噪聲,信號(hào)經(jīng)EEMD分解后的IMF分量仍然會(huì)有一定量的噪聲存在,因此需要對(duì)IMF分量進(jìn)行降噪處理。最大相關(guān)峭度解卷積(Maximum Correlated Kurtosis Deconvolution,MCKD)是MCDONALD等提出的適用于突出被噪聲淹沒(méi)的周期性沖擊成分的算法,在軸承微弱故障診斷中取得了一定成果。然而,MCKD的使用需要提前設(shè)置濾波器長(zhǎng)度和解卷積周期。需要指出的是,濾波器長(zhǎng)度和解卷積周期在MCKD算法中并不是完全獨(dú)立的,單獨(dú)優(yōu)化其中一個(gè)參數(shù)無(wú)法獲得最佳的降噪效果。因此,需要采用合適的尋優(yōu)算法進(jìn)行參數(shù)組合的尋優(yōu)。
灰狼優(yōu)化算法(Grey Wolf Optimization,GWO)是由MIRJALILI等受到灰狼野外捕食活動(dòng)的啟發(fā)而開(kāi)發(fā)的一種群智能優(yōu)化算法,具有參數(shù)少、易收斂、易實(shí)現(xiàn)等優(yōu)點(diǎn)。近年來(lái),它受到了許多學(xué)者的關(guān)注,并成功應(yīng)用在故障診斷領(lǐng)域中。
綜上所述,本文作者將EEMD和MCKD兩種方法相結(jié)合,用于門(mén)座起重機(jī)回轉(zhuǎn)支承故障診斷。為實(shí)現(xiàn)MCKD參數(shù)的自適應(yīng)選取,采用灰狼優(yōu)化算法,以相關(guān)峭度為適應(yīng)度函數(shù)對(duì)最佳參數(shù)組合進(jìn)行全局尋優(yōu)。
1 原理與故障診斷框架
1.1 EEMD原理及算法流程
EEMD方法通過(guò)在原始信號(hào)中多次加入等幅值的高斯白噪聲,利用高斯白噪聲頻率均勻的特性,對(duì)多次EMD分解后的IMF分量進(jìn)行平均,消除多次加入的高斯白噪聲,同時(shí)有效抑制由極值分布不均而引起的模態(tài)混疊。EEMD分解的步驟如下:
(1)設(shè)定加入高斯白噪聲的次數(shù),即總體平均次數(shù);
(2)向原始信號(hào)()中加入一組均勻的高斯白噪聲(),產(chǎn)生新的信號(hào):
()=()+()
(1)
(3)對(duì)帶噪信號(hào)()進(jìn)行EMD分解,得到若干個(gè)IMF和一個(gè)余項(xiàng):
(2)
其中:,()為第次實(shí)驗(yàn)的帶噪信號(hào)分解后的第個(gè)IMF;()為殘余函數(shù);
(4)重復(fù)次步驟(2)和步驟(3),對(duì)得到的各IMF和余項(xiàng)取平均即為最終的IMF和余項(xiàng):
(3)
(4)
其中:()為EEMD分解后的第個(gè)IMF;()為EEMD分解后的余項(xiàng)。
1.2 MCKD原理及算法流程
假設(shè)回轉(zhuǎn)支承發(fā)生故障時(shí)產(chǎn)生的周期性信號(hào)為(),傳遞路徑衰減響應(yīng)為(),采集信號(hào)時(shí)摻雜的環(huán)境噪聲為(),則實(shí)測(cè)信號(hào)()為
()=()×()+()
(5)
MCKD算法的實(shí)質(zhì)是找尋最優(yōu)濾波器,使得從實(shí)測(cè)信號(hào)()中盡可能地恢復(fù)周期性信號(hào)()。該算法將相關(guān)峭度最大為指標(biāo),將淹沒(méi)在環(huán)境噪聲中的周期性信號(hào)凸顯出來(lái)。相關(guān)峭度的計(jì)算公式為

(6)
其中:為沖擊信號(hào)的周期;為移位數(shù),取值范圍一般為1~7,如果大于7,精度會(huì)降低,文中選擇參數(shù)為5。
若要相關(guān)峭度最大,則等價(jià)于:

(7)
其中:為濾波器長(zhǎng)度。
最終經(jīng)計(jì)算推導(dǎo)可得出為

(8)
其中:
=0,, 2, …,
MCKD算法的流程如圖1所示。
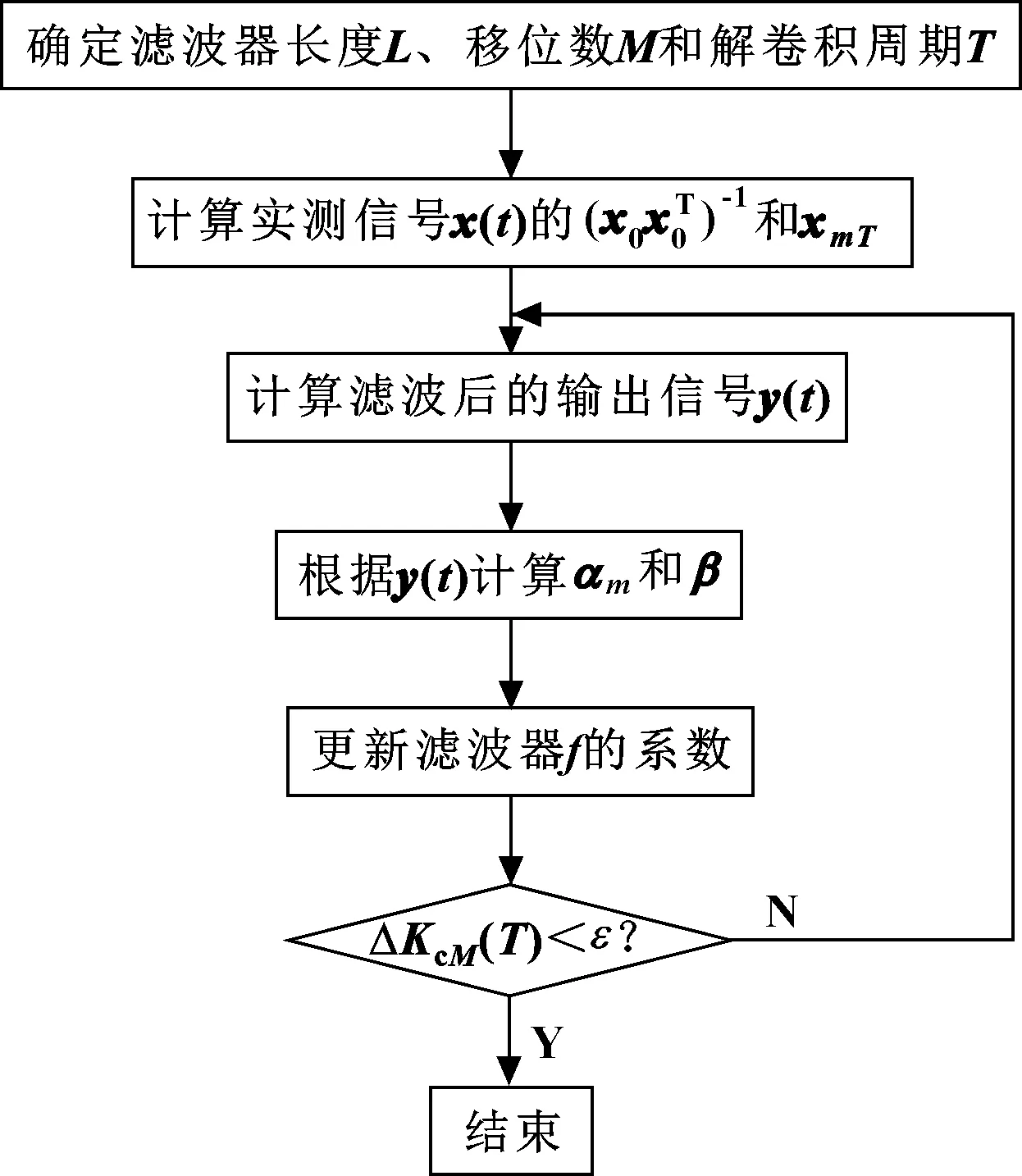
圖1 MCKD流程
1.3 GWO原理
灰狼是群居生活動(dòng)物,并嚴(yán)格遵守著金字塔等級(jí)關(guān)系。處于最頂層的頭狼為α狼,負(fù)責(zé)對(duì)食物獲取和棲息位置作出決策,具有領(lǐng)導(dǎo)地位;第2層為β狼,服從于α狼,同時(shí)也是α狼去世后的最佳候選者;第3層為δ狼,服從于α、β狼;最后一層為ω狼,是整個(gè)狼群的基礎(chǔ),同時(shí)也需要服從前3個(gè)層次的狼。灰狼捕獵主要分為3個(gè)階段:追蹤、包圍、攻擊。
灰狼優(yōu)化算法的數(shù)學(xué)模型表示如下:
=·()-()
(9)
(+1)=()-·
(10)
其中:為狼群與獵物之間的距離;為當(dāng)前迭代次數(shù);為獵物的位置;為狼群的位置;、為協(xié)同系數(shù),=2·-、=2,式中,∈[0,1],在整個(gè)迭代過(guò)程中由2降到0。
灰狼搜尋獵物主要按α、β、δ狼的指引來(lái)完成。因此,在迭代的過(guò)程中,保留當(dāng)前最優(yōu)的3只灰狼作為α、β、δ狼,再根據(jù)它們的位置來(lái)更新狼群的位置,該過(guò)程可表示為
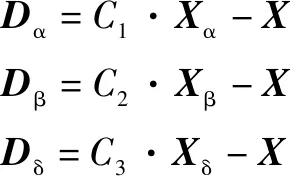
(11)
(12)
其中:、、分別為α、β、δ狼和獵物之間的距離;、、分別為α、β、δ狼的位置向量。
1.4 診斷方法流程框架
采用EEMD與GWO-MCKD相結(jié)合的方法對(duì)低速重載門(mén)座起重機(jī)回轉(zhuǎn)支承故障特征進(jìn)行提取,具體步驟如下:
(1)確定EEMD算法的參數(shù)。EEMD中有2個(gè)需要人為設(shè)定的參數(shù):高斯白噪聲的標(biāo)準(zhǔn)差和添加噪聲的次數(shù)。標(biāo)準(zhǔn)差根據(jù)信號(hào)中噪聲大小而定,一般為0.01~0.4,文中選擇0.2;添加噪聲次數(shù)通常取50或100,文中選擇50;
(2)對(duì)原始振動(dòng)信號(hào)進(jìn)行EEMD分解,選擇峭度最大的IMF作為最優(yōu)分量;
(3)使用GWO算法,以相關(guān)峭度為適應(yīng)度函數(shù)在最優(yōu)分量上進(jìn)行MCKD參數(shù)尋優(yōu)。濾波器長(zhǎng)度的尋優(yōu)范圍設(shè)置為[100,700],解卷積周期=/,其中:為采樣頻率,為故障特征頻率。因故障特征頻率未知,本文作者根據(jù)回轉(zhuǎn)支承參數(shù)計(jì)算理論故障特征頻率,將其最大值與最小值代入公式,得到解卷積周期的范圍。此外,因理論故障特征頻率與實(shí)際故障特征頻率存在誤差,應(yīng)適當(dāng)將計(jì)算得到的范圍擴(kuò)大;
(4)將GWO尋優(yōu)得到的最佳參數(shù)組合代入MCKD,以此對(duì)最優(yōu)分量進(jìn)行分析,并做出包絡(luò)譜;
(5)將包絡(luò)譜中發(fā)現(xiàn)的故障特征頻率與理論故障特征頻率進(jìn)行對(duì)比分析,得出診斷結(jié)果。
整個(gè)診斷方法的流程如圖2所示。
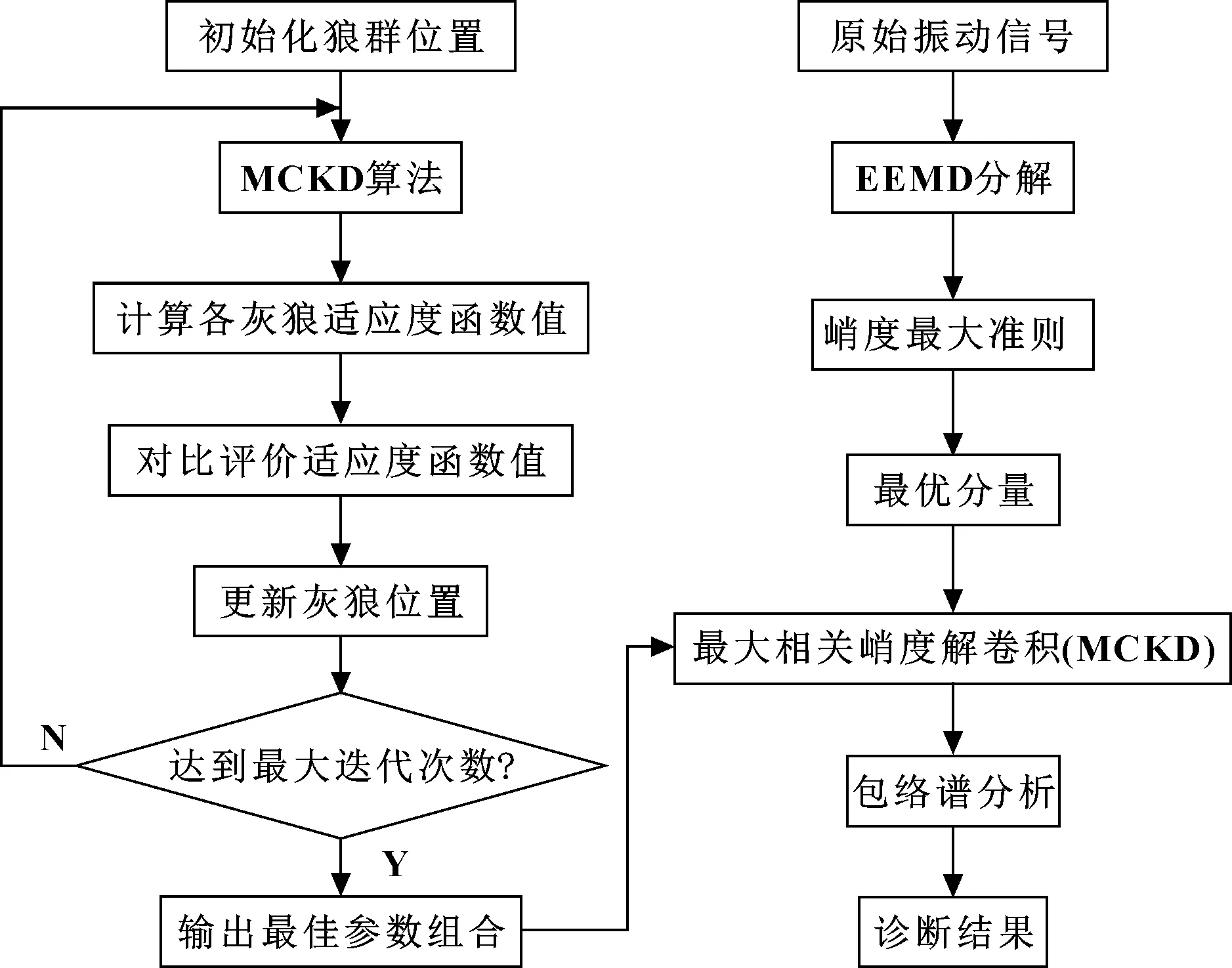
圖2 EEMD與GWO-MCKD方法流程
2 回轉(zhuǎn)支承平臺(tái)與信號(hào)采集
文中所分析數(shù)據(jù)采集于某港口門(mén)座起重機(jī)中的回轉(zhuǎn)支承,型號(hào)為132.50.4000。該回轉(zhuǎn)支承結(jié)構(gòu)為三排滾柱式,工作方式為外圈固定、內(nèi)圈旋轉(zhuǎn)。此次數(shù)據(jù)采集選取加速度傳感器。由于傳感器的布置直接影響采集數(shù)據(jù)的質(zhì)量,故先對(duì)傳感器放置的位置進(jìn)行分析。為盡量減小噪聲的干擾以及提高信號(hào)傳遞的質(zhì)量,將加速度傳感器放置在門(mén)座起重機(jī)的背風(fēng)側(cè)且靠近回轉(zhuǎn)支承的位置。此外,回轉(zhuǎn)支承主要受到軸向力、徑向力和傾覆力矩的作用,應(yīng)在軸向和徑向均布置傳感器。傳感器的具體布置方式如圖3所示。
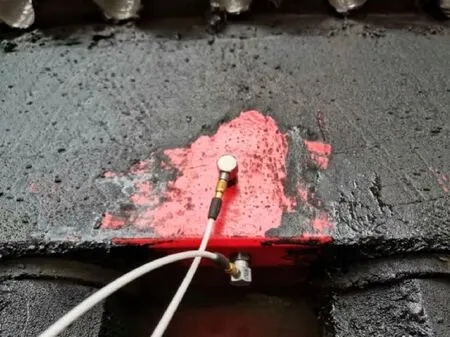
圖3 傳感器布置
根據(jù)現(xiàn)場(chǎng)實(shí)際工作環(huán)境,選擇載荷及速度較為穩(wěn)定的條件下進(jìn)行數(shù)據(jù)采集。采集時(shí)回轉(zhuǎn)支承的轉(zhuǎn)速為1.22 r/min,采樣頻率為400 Hz。同時(shí)為了避免遺漏故障信息,每次采樣時(shí)間均大于回轉(zhuǎn)支承旋轉(zhuǎn)一周的時(shí)間。
3 信號(hào)分析與結(jié)果
3.1 理論故障特征頻率計(jì)算
三排滾柱式回轉(zhuǎn)支承可以簡(jiǎn)化為普通的三排滾動(dòng)軸承。因此,其理論故障特征頻率計(jì)算公式可使用滾動(dòng)軸承的計(jì)算公式。具體如下:

(13)

(14)

(15)
其中:、、分別為理論內(nèi)圈故障特征頻率、理論外圈故障特征頻率、理論滾動(dòng)體故障特征頻率;為回轉(zhuǎn)支承中徑;為滾動(dòng)體直徑;為滾動(dòng)體數(shù)目;為接觸角;為轉(zhuǎn)頻。
依據(jù)公式(13)—(15)可計(jì)算出回轉(zhuǎn)支承理論故障特征頻率如表1所示。
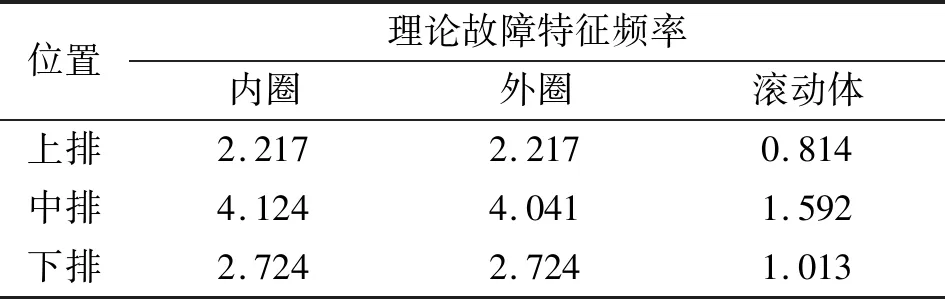
表1 理論故障特征頻率 單位:Hz
3.2 現(xiàn)場(chǎng)信號(hào)分析與對(duì)比
為避免故障信息的遺落,選擇回轉(zhuǎn)支承旋轉(zhuǎn)兩周(98 s)的數(shù)據(jù)進(jìn)行分析。圖4所示為此數(shù)據(jù)的時(shí)域圖和頻譜圖。從時(shí)域圖中可觀察到明顯的沖擊成分,從頻譜圖中可以觀察到許多突出頻率,但無(wú)法從中直接辨別故障的特征頻率。因此,需對(duì)原始信號(hào)進(jìn)行信號(hào)處理再進(jìn)一步分析。
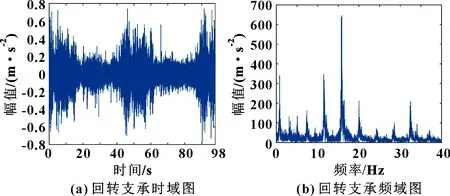
圖4 回轉(zhuǎn)支承時(shí)域圖與頻域圖
依據(jù)第1.4節(jié)所提方法流程對(duì)現(xiàn)場(chǎng)信號(hào)進(jìn)行分析。首先,使用EEMD算法對(duì)原始信號(hào)進(jìn)行分解,得到14個(gè)IMF,計(jì)算每個(gè)IMF的峭度值如圖5所示。可以看出:IMF2的峭度值最大,則選擇它作為分析的最優(yōu)分量;其次,根據(jù)解卷積周期公式,從表1中選取最大、最小理論故障特征頻率代入,可得解卷積周期的理論尋優(yōu)范圍為(96,492),將范圍適當(dāng)擴(kuò)大為(90,500)。MCKD的參數(shù)尋優(yōu)過(guò)程如圖6所示。可以看出:該算法在進(jìn)行到第7代的時(shí)候,相關(guān)峭度達(dá)到最大,此時(shí)對(duì)應(yīng)的最佳和組合為[689,97];最后,設(shè)定MCKD中的濾波器長(zhǎng)度=689、解卷積周期=97,得到最優(yōu)分量經(jīng)MCKD處理后的包絡(luò)譜如圖7所示。可以觀察到:包絡(luò)譜中存在4.2 Hz的故障特征頻率及其倍頻;與表1中的理論故障特征頻率對(duì)比,發(fā)現(xiàn)它與中排回轉(zhuǎn)支承理論內(nèi)圈故障特征頻率4.124 Hz最為接近。因回轉(zhuǎn)支承的制造安裝誤差與使用時(shí)的磨損和相對(duì)滑動(dòng),特征頻率會(huì)存在一定的誤差。因此,可以判定回轉(zhuǎn)支承中排內(nèi)圈發(fā)生了較為嚴(yán)重的損傷。整個(gè)方法的過(guò)程與結(jié)果表明故障特征頻率被準(zhǔn)確地提取,從而也驗(yàn)證了所提方法的有效性。
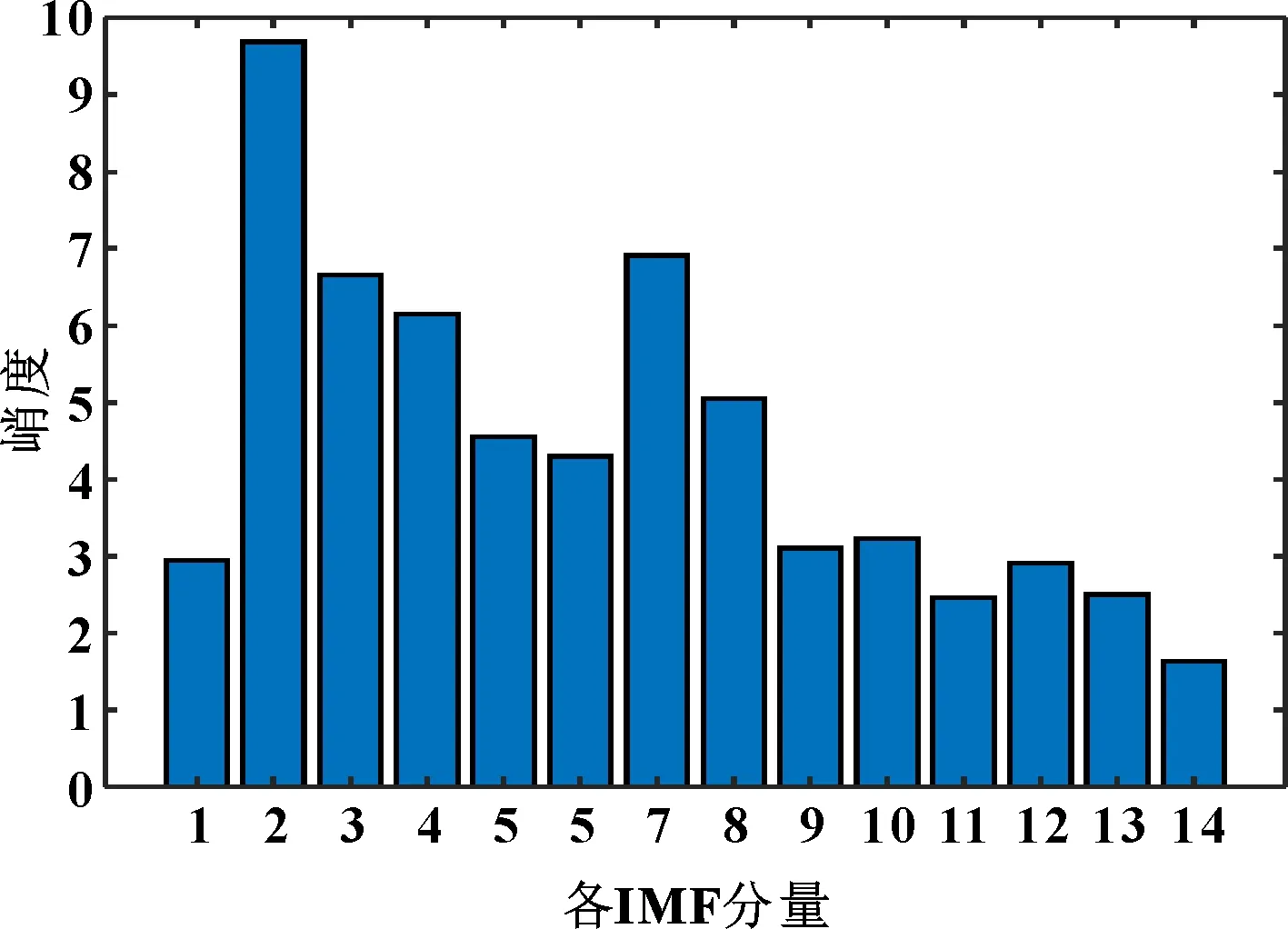
圖5 各IMF峭度
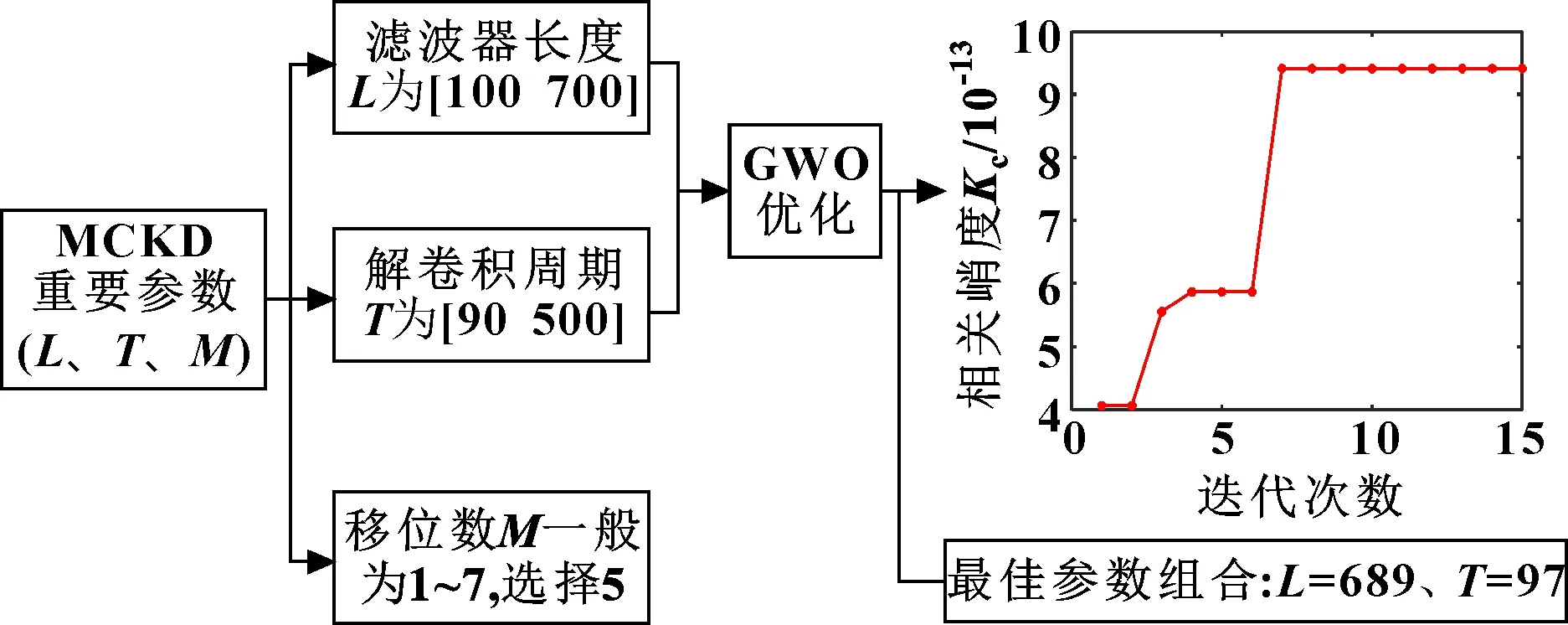
圖6 MCKD參數(shù)尋優(yōu)
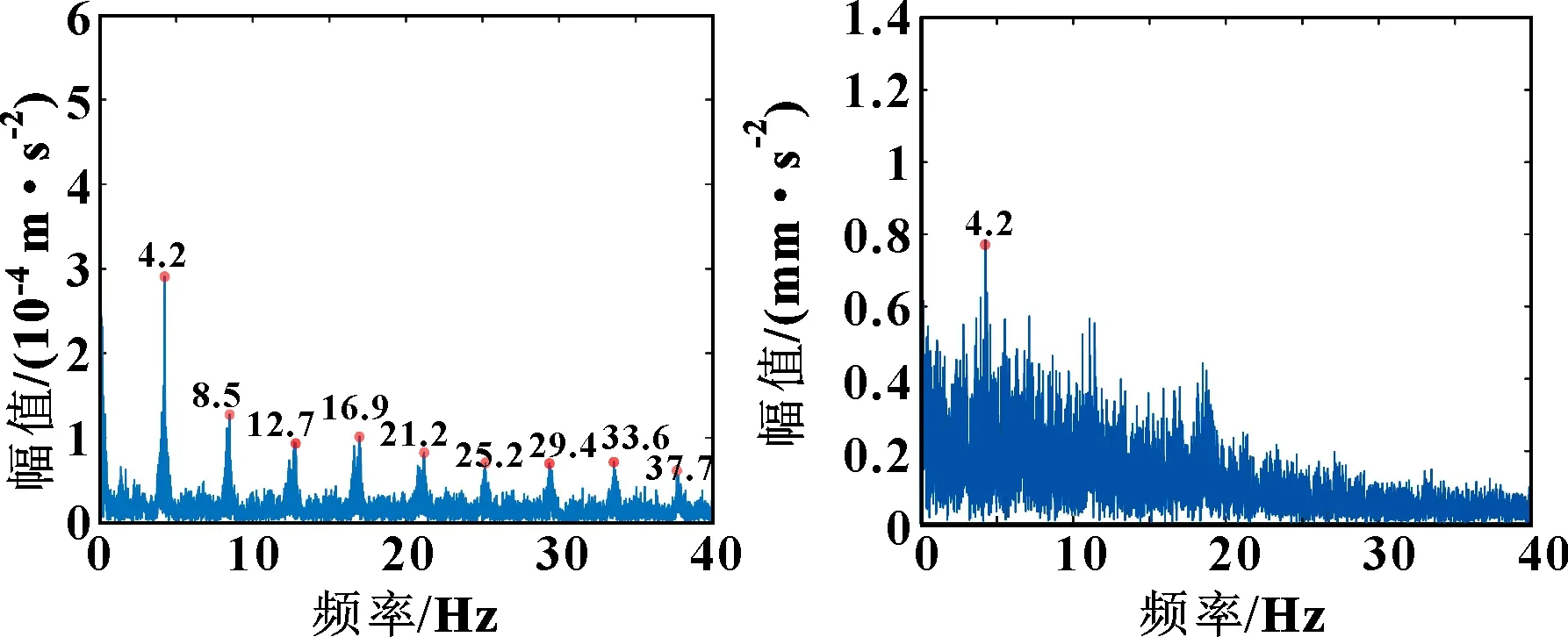
圖7 最優(yōu)分量經(jīng)GWO-MCKD 圖8 EEMD峭度最
為證明所提方法結(jié)合MCKD算法的必要性,將EEMD分解后的峭度最優(yōu)分量直接做包絡(luò)譜分析進(jìn)行對(duì)比。EEMD最優(yōu)分量的包絡(luò)譜如圖8所示。可以發(fā)現(xiàn)存在4.2 Hz的故障特征頻率,其倍頻成分不夠突出且伴隨著許多雜頻。與所提方法對(duì)比,僅用EEMD算法結(jié)合包絡(luò)譜未能充分提取故障頻率倍頻。
為進(jìn)一步證明所提方法的優(yōu)越性,使用最小熵解卷積算法(MED)對(duì)峭度最優(yōu)分量進(jìn)行分析對(duì)比。MED算法主要受濾波器長(zhǎng)度的影響,為使對(duì)比結(jié)果更具說(shuō)服力,將MED的濾波器長(zhǎng)度設(shè)為與MCKD的濾波器長(zhǎng)度一致,即=689。采用MED算法對(duì)峭度最優(yōu)分量進(jìn)行處理后得到的包絡(luò)譜如圖9所示。可以看出:有較為突出的4.2 Hz的故障特征頻率及其二倍頻、三倍頻,但未發(fā)現(xiàn)更高倍頻且伴隨著許多雜頻。結(jié)果表明:所提方法在門(mén)座起重機(jī)回轉(zhuǎn)支承故障特征提取上擁有更好的性能。
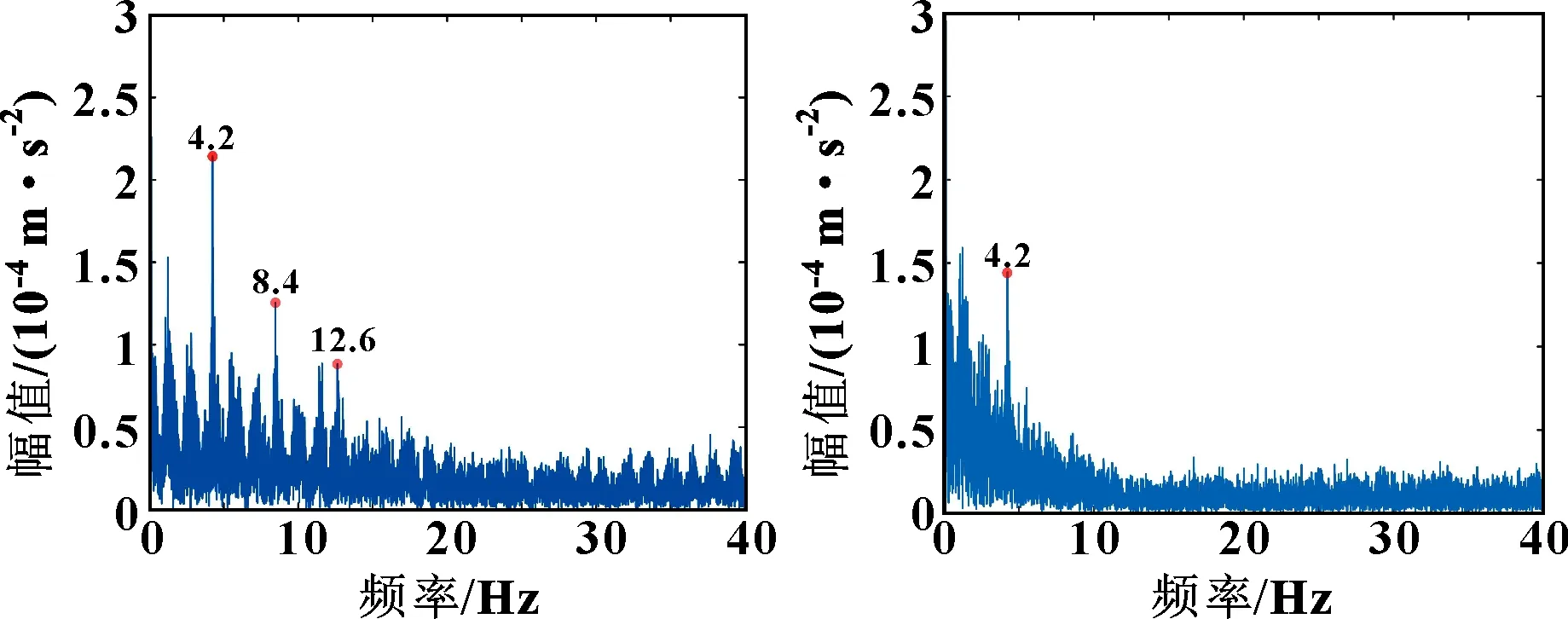
圖9 最優(yōu)分量經(jīng)MED 圖10 最優(yōu)分量經(jīng)PSO-MCKD
為證明GWO參數(shù)尋優(yōu)的優(yōu)越性,使用粒子群算法(PSO)對(duì)峭度最優(yōu)分量進(jìn)行MCKD參數(shù)尋優(yōu)。PSO尋找的最佳參數(shù)組合[,]為[100,90],在此參數(shù)下的MCKD降噪后的包絡(luò)譜如圖10所示。從圖中僅可以觀測(cè)出4.2 Hz的故障頻率,無(wú)明顯倍頻成分,表明故障特征未被充分提取;與PSO-MCKD相比,GWO優(yōu)化MCKD的結(jié)果更為可靠。
4 結(jié)論
針對(duì)低速重載的門(mén)座起重機(jī)回轉(zhuǎn)支承故障特征難以提取的問(wèn)題,本文作者提出了一種基于EEMD與GWO-MCKD的門(mén)座起重機(jī)回轉(zhuǎn)支承故障特征提取方法。利用該方法,可有效實(shí)現(xiàn)現(xiàn)場(chǎng)門(mén)座起重機(jī)回轉(zhuǎn)支承故障診斷。結(jié)果表明:
(1)以相關(guān)峭度為適應(yīng)度函數(shù),采用灰狼優(yōu)化算法能自適應(yīng)尋找MCKD算法中的最佳參數(shù)和的組合;
(2)在該參數(shù)組合下的MCKD算法能夠有效抑制背景噪聲,突出周期沖擊成分;
(3)所提方法相比于僅使用EEMD或EEMD-MED方法,在故障特征提取上擁有更好的性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
