直升機懸停救助模擬器工作空間分析
2022-09-17 08:06:24王盛業王海濤熊偉關廣豐
機床與液壓 2022年7期
王盛業,王海濤,熊偉,關廣豐
(大連海事大學船舶與海洋工程學院,遼寧大連 116026)
0 前言
自從1965年STEWART對GOUGH研制的并聯機構進行改進,并將其應用于飛行模擬器的運動產生裝置以來,六自由度平臺因其剛度大、承載能力強、精度高等優點,被廣泛應用于運動模擬器、并聯機床、精密定位平臺、空間對接等領域。
直升機懸停救助模擬器用于在陸上實驗室中模擬訓練救生人員在惡劣海況條件下運用特殊救助裝備(專用絞車、紅外搜尋、救生衣、救生筏等)進行的直升機懸停救助任務。我國現有S-76+救助直升機25架,分布于11個沿海城市,實行動態待命,以應對突發事件。直升機救助機組訓練只能集中到沒有海上救援任務時進行,很大程度上限制了訓練周期與風險。為此,某大學救助與打撈工程實驗室建立了直升機懸停救助系統,相對于實際訓練,它具有安全高效、節省成本等優點,是救援訓練的重要方式。直升機懸停救助模擬系統由地面上的造浪水池和懸掛在橋式起重機上的救助模擬器組成,其中Stewart并聯機構作為直升機模擬機艙的運動產生裝置,通過采集真實救助場景下的直升機運動數據,復現直升機懸停運動狀態,如圖1所示。Stewart并聯平臺在不同的救助場景有不同運動狀態和軌跡,為保證Stewart并聯機構在模擬直升機懸停運動時的活動范圍不超過平臺最大邊界范圍,同時,保證模擬器機艙與周圍環境不產生干涉,需要對Stewart平臺的可達工作空間進行計算和分析。
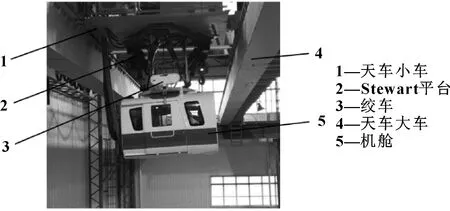
圖1 直升機懸停救助模擬平臺
工作空間是并聯機構末端機構活動所能達到的可能方位,是評價并聯機構工作能力的一個重要指標。與串聯機構不同,并聯機構的工作空間表示的主要問題在于:關于任意自由度的有關限制總是耦合的,很難找到結構尺寸與工作空間的必然聯系。對于自由度大于3的機器人,僅當固定-3個位姿參數時,才能圖形化地描述工作空間。
目前,計算并聯機構工作空間的主要方法有兩類:幾何方法、數值方法。幾何法原理是:確定每個滿足一定約束的主動件所有運動范圍,所有主動件運動范圍的交集就是并聯機構的工作空間。幾何方法雖然快速和精確,但很難考慮所有約束,必須調整以適應不同研究對象。在數值方法中,工作空間被笛卡爾坐標或極坐標節點網絡覆蓋,測試每個節點,判斷是否屬于工作空間。數值方法計算量大,邊界精度依和計算時間依賴采樣步長。
以上兩種方法都不適應直升機懸停救助模擬器需要頻繁快速驗證各種海況下直升機真實運動數據的應用場合,為此,本文作者提出一種基于運動學正解的工作空間凸包算法。該方法是將并聯平臺的電動缸行程量均勻分段,運用運動學正解得到并聯平臺的可達位置坐標點點集,不同于數值方法需要驗證每個步長的節點,該方法不需要測試冗余節點,節省了大量運算。由于運動學正解計算獲得的可達位置坐標點分布不均勻,分布規律復雜,難于公式化,運用凸包算法將離散的可達位置坐標點空間化,計算出可達工作空間三維邊界,研究分段數與三維邊界的相關性,進一步減少求解過程中的運算量。
研究內容如下:(1)可達工作空間凸包算法的計算模型,包括Stewart并聯機構的運動學正解和凸包算法理論模型;(2)直升機懸停模擬并聯平臺可達工作空間的計算結果及正確性驗證。
1 計算可達工作空間點集
Stewart直升機懸停模擬并聯平臺主要包括與天車小車連接固定的靜平臺,與模擬艙連接的動平臺,以及6根不帶防回轉裝置的電動缸。平臺倒掛于橋式起重機上,靜、動平臺與電動缸之間通過虎克鉸連接。
平臺結構參數如圖2所示,分別包括靜平臺鉸圓半徑、動平臺鉸圓半徑、靜平臺短邊鉸間距、動平臺短邊鉸間距、中位缸長、電動缸行程等6個參數。由于Stewart平臺的機構特點,根據以上6個參數就可以確定平臺的基本結構。、分別為動、靜平臺的短邊夾角。
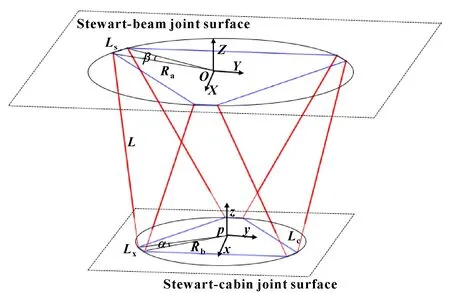
圖2 Stewart平臺結構示意
Stewart平臺的運動正解是指:已知平臺6條支腿的長度,求解平臺的位置姿態。選取固定不動的靜平臺鉸圓圓心為靜坐標系的坐標原點,選取動鉸圓圓心為動坐標系的坐標原點,定義平臺初始位置為平臺中位。在平臺每條支腿的長度已知時,根據上、下鉸點在靜坐標系中的關系,最終可獲得6個變量6個方程的非線性方程組。
將6個動鉸點在坐標系中坐標用矩陣表示,鉸支點在靜坐標系中的坐標可用矩陣表示為
=·
(1)
轉換矩陣可表示為下式
=

(2)
式中:c表示余弦符號cos ;s表示正弦符號sin。
運動平臺的姿態表示為

(3)
其中:為Stewart并聯機構靜平臺在靜坐標系的坐標矩陣;為Stewart平臺電動缸的長度矩陣。
以Stewart平臺中位位姿作為初始點,用牛頓迭代法求解非線性方程組()=0 (=1,2,…,6),即可得到特定支腿長度下的平臺位姿。
將Stewart平臺6根電動缸的行程均勻分段,分段數為,的數值大小將決定Stewart平臺可達工作空間的解算離散點數和求解時間。設定動平臺鉸圓圓心在靜坐標系中的坐標值為平臺位姿的位置描述,則每一個離散點代表與之對應的一種Stewart平臺位姿。對于分段數為的6條支腿,正解后得到(+1)種平臺位姿,用點集表示,方便下一步凸包算法進行空間化篩選。
2 凸包算法
凸包是計算幾何中重要的幾何結構,把多面體的任何一個面無限延展,其他所有面都在這個延伸面的同一側,這類多面體叫做凸包。凸包算法要解決的問題是找出包圍點集的最小凸區域的邊界,其定義為能夠包含的最小凸集。

(4)
凸包算法框架如下:
步驟1,凸包初始化。掃描點集,并從中選取4個不共面的點構成四面體。選取原則為:選取坐標軸方向兩端極值點構成線段,選取距離線段最遠點構成平面,最后選取距離該平面最遠點構成四面體,即初始凸包,并構建凸包集合。
步驟2,判斷新添加點與凸包的相對位置。隨機選取點集中剩余一點,分別與凸包集合中所有三角形平面上一點連接,判斷與三角形平面法向量關系,若與所有三角平面都符合≥0,則認為該點在凸包外部,否則舍棄該點,重新選取剩余點。
步驟3,構建新的凸包集合。與凸包集合最近三點構造四面體,并與四面體構成新的凸包集合,如圖3所示。
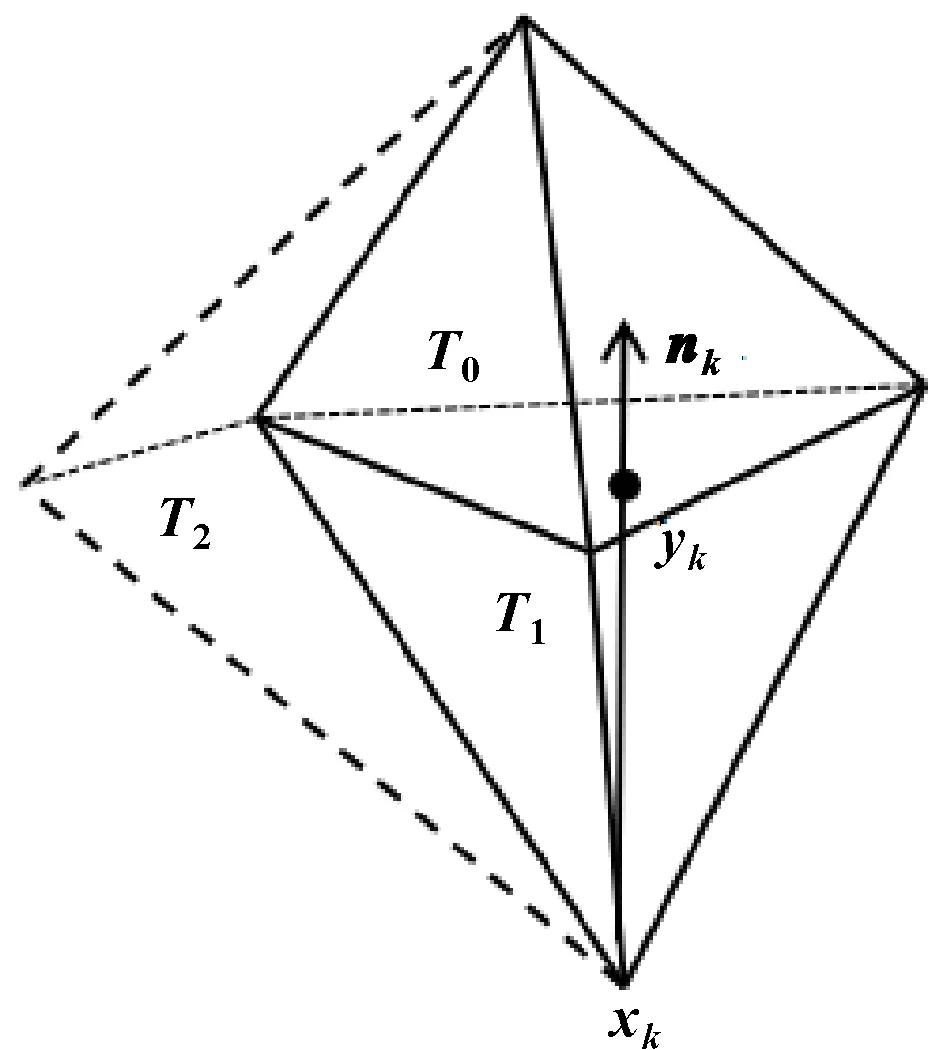
圖3 凸包算法示意
步驟4,循環判斷點集中剩余的點。重復執行步驟2和步驟3,直到遍歷點集所有點,算法結束。最終得到的三維凸包即為Stewart平臺的可達工作空間。凸包算法流程如圖4所示。

圖4 凸包算法流程
3 計算結果及試驗
3.1 計算結果
基于MATLAB編寫求解程序,交互界面如圖5所示,程序輸入靜平臺鉸圓半徑、動平臺鉸圓半徑、靜平臺短邊鉸間距、動平臺短邊鉸間距、中位缸長、電動缸行程等6個參數,可求解出工作空間;更改交互界面輸入參數的數值,可求解不同結構參數Stewart并聯平臺的可達工作空間,分段數用于調節計算時間和計算精度。該程序同時具有干涉檢測功能,添加一段直升機懸停救助模擬器運動狀態數據,可以繪制模擬器運動軌跡,并與已知平臺工作空間進行干涉檢測。輸入實驗室中直升機懸停救助模擬器并聯平臺參數,=1.05 m、=0.75 m、=0.2 m、=0.15 m、=1.3 m、=0.4 m,調節分段數為4,可顯示平臺結構和平臺的可達工作空間,求得可達工作空間體積為0.137 m。平臺最大轉動角度計算結果為:橫搖角范圍為±23°、縱搖角范圍±23°、偏航角范圍為±25°。

圖5 Stewart平臺工作空間求解程序
3.2 算法效率
算法求解速度和求解分辨率與點集中點的數量有關。分段數越大,點集中點的數量越多,求解時間越長,求解分辨率越高。程序運行計算機配置如下:Intel Core i5-4460@3.20 GHz、RAM8.00 GB。數值算法采用邊界搜索法,以動平臺鉸圓圓心為起點,將空間按步長劃分為離散點,驗證每個離散點是否滿足支腿長度、轉角等限制。圖6顯示凸包算法計算點的數量與耗時關系曲線,橫坐標是離散點的數量,用對數表示,左側縱坐標為算法耗時。從凸包算法耗時和數值算法耗時兩條曲線趨勢可以看出:隨著計算點數量的增多,兩種算法的時間消耗和計算點的數量趨近于線性關系,在相同計算點數條件下,凸包算法耗時僅為數值算法的50%。另一方面,數值算法依賴大量數據的求解,計算點數的數量級通常在百萬以上,而凸包算法在幾萬數量級時,就可以得到體積穩定的工作空間。右側縱坐標描述了計算點數與可達工作空間的體積大小關系曲線,可以看出:當分段數大于4時,工作空間的體積大小趨于穩定,計算結果不再變化。分段數為4時,點集內點的數量為15 625個,耗時72 s。兩種算法效率對比可以看出,不僅在相同計算量的條件下,凸包算法更加快速,并且在實際工程應用中,凸包算法可以用低于數值算法兩個數量級的計算量得到體積穩定的工作空間。
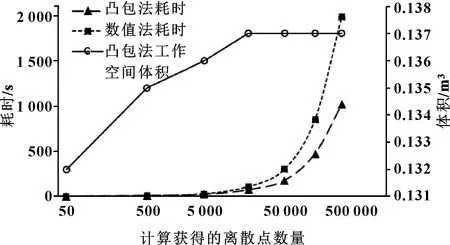
圖6 凸包算法計算點的數量與耗時關系
3.3 算法準確度驗證
直升機懸停救助模擬器并聯平臺處于極限位姿時,是并聯平臺所能達到的最遠距離,驗證并聯平臺處于極限位姿時動平臺圓心在求解的可達工作空間的邊界上,即可證明程序的準確性。分別對并聯平臺的15個極限位姿時動平臺圓心位置進行驗證,結果顯示:當并聯平臺處于沿空間坐標軸平移的極限位姿時,動平臺圓心位于計算得出的可達工作空間邊界之上;當并聯平臺處于繞空間坐標軸轉動的極限位姿時,動平臺圓心在可達工作空間邊界之內。圖7為其中4組試驗結果,動平臺圓心為黑色圓點。

圖7 并聯平臺極限位姿與可達工作空間位置關系
同時,對Stewart平臺可達工作空間的求解結果進行實驗驗證。由于零姿態角時Stewart平臺的工作空間最大,實驗方案選擇測量在動平臺姿態角為(0,0,0)時,平面和平面處可達工作空間邊界的坐標值。首先固定軸坐標為0,將直升機懸停救助模擬器分別沿軸和軸方向移動,使其處于極限位姿,此時選取動平臺圓心為測量點,測量圓心分別距離平面和平面的數值,可以得到兩個測量位置。將懸停救助模擬器回歸到初始位置,按上述操作對軸方向每隔0.05 m進行一輪測量,共可以得到22個測量位置。將直升機懸停救助模擬器移動到測量平臺可達空間邊界值,并與通過正解包絡法計算得到的邊界值進行對比,誤差為正表示計算值比測量值大,誤差為負表示計算值比測量值小。結果顯示:正解包絡法在平臺可達工作空間的上下兩端精度較高,誤差為1%左右,在工作空間中部誤差較大,且為正誤差,誤差在5%以內。
分別在平面和平面的軸方向均勻選取11個測量點,測量平臺可達空間邊界值,并與通過正解包絡法計算得到的邊界值進行對比,誤差為正表示計算值比測量值大,誤差為負表示計算值比測量值小。表1結果顯示:正解包絡法在平臺可達工作空間的上下兩端精度較高,誤差為1%左右,在工作空間中部誤差較大,且為正誤差,誤差在5%以內。
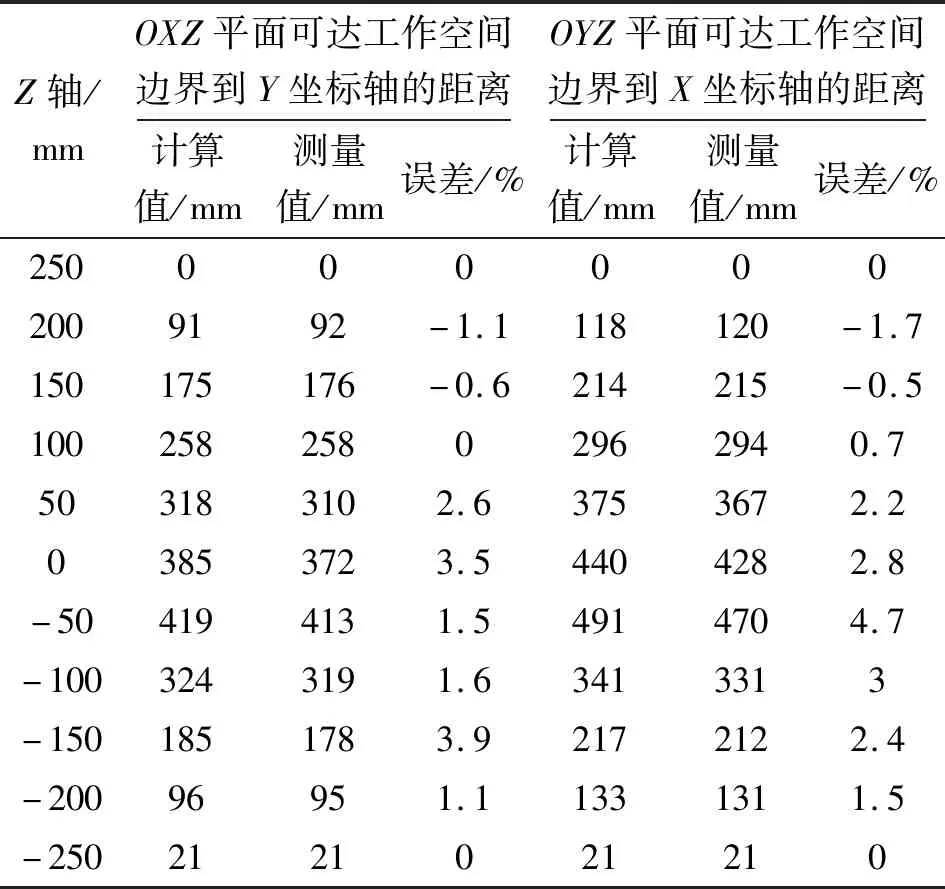
表1 可達工作空間計算值與測量值對比
4 結論
提出一種基于Stewart并聯平臺運動學正解和凸包算法結合的可達工作空間求解方法:將平臺6條支腿伸長量離散化,用運動學正解得到并聯平臺的可達位置坐標點點集,結合凸包算法將離散的可達位置坐標點空間化,計算出可達工作空間三維邊界,并通過研究分段數與三維邊界的相關性,進一步減少求解過程中的運算量。
該方法與常用可達空間求解方法相比,不必預設工作空間范圍后預測各個節點,減少了大量冗余計算,對于一般Stewart平臺,1 min左右就可以計算得到可達工作空間的三維參數;同時,該方法具有較好的精確度,兩端誤差1%,最大誤差在5%以內。對直升機懸停救助模擬器不同工況下運動軌跡的干涉檢測提供了依據,為以后建立類似救助模擬器提供了參考。
