基于車聯網的多車協同式自動駕駛控制研究
2022-07-05 09:46:54黃露姚麗楊易
時代汽車 2022年13期
關鍵詞:系統
黃露 姚麗 楊易
長沙智能駕駛研究院 湖南省長沙市 410100
1 引言
多車協同式編隊系統基于車聯網V2V 技術,對多臺車輛并組管理并結合車輛自動駕駛控制技術,通過縮短車輛之間距離來增加道路的通行能力。最近的研究還表明,在高速公路上通過將卡車編隊自動駕駛,可以減少車隊內跟隨車輛的風阻,顯著節省燃料、溫室氣體和排放。
由于具有良好的燃油消耗效益和商業模式,多車協同式編隊自動駕駛技術吸引了大量關注。因目前,大量研究工作旨在降低重型車輛的燃油消耗,這也為運輸公司提供了明顯的經濟效益。通這對重型車輛的編組,給出了一種降低油耗的有效方法。通過減小車間距,可以降低整體空氣動力阻力。由于重型車輛大約四分之一的燃油消耗與空氣動力阻力有關,這會對燃油消耗產生很大影響。事實上,文獻中的實驗結果表明,油耗降低了約7%。除了節省燃料消耗外,協同式編隊行駛還可能增加道路通行能力,提高交通流量。文獻中提出一種車隊前饋控制策略,主要關注與車輛的燃油效率,未考慮車輛近間距控制問題。文獻在文獻研究的基礎上提出一種車輛前饋控制和間距控制結合的方法,文章中考慮車輛燃油最佳使用效率得到車輛最佳速度參考文件,以此作為車輛控制系統的參考,計算控制指令控制車輛跟蹤該速度曲線,并保證所需的車間距離。但該方法并未考慮首車司機實際駕駛過程中的行為習慣,以及道路實際情況對司機駕駛車輛的影響(如急停車、急加速),無法良好跟隨首車保持穩定間距進行啟停、加減速。
本文從上述的研究成果出發,針對車隊自動駕駛車輛在首車急加速、啟停過程中存在間距控制發散問題,提出一種多車車輛固定車距的滑模控制策略,充分考慮首車和前車的速度、位置、加速度等信息,設計滑模控制的滑模面,得出自動駕駛車輛期望加速度。通過調整控制增益和系統阻尼比系數,保證滑模面趨近于零,保證車隊中的自動駕駛車輛以穩定車距跟隨前方車輛行駛。
本文介紹的應用實例是兩臺陜汽德龍X6000 重卡車頭加帶半掛車在長沙智能網聯測試區的實車測試驗證(首車人開、跟隨車自動駕駛)。通過對算法模型進行推導和實車測試,對比兩臺車輛之間的位置誤差、速度誤差,多方面的測試結果驗證了車隊在首車啟動、停車、加減速、巡航過程中能保證穩定車距行駛,誤差范圍滿足團標《營運車輛合作式自動駕駛貨車編隊行駛》的要求。
2 控制模型
多車協同式自適應巡航控制是一種擴展自適應巡航控制的概念,通過車聯網之間的車車實時通信技術,實現縱向自動車隊控制。通過設計一種自適應滑模控制模型,具備固定車間距控制策略的穩定行駛模變控制系統特性,能保證車隊穩定行駛。
控制器采用滑模控制,根據車輛行駛道路基本屬性,定義滑模面為;

為阻尼比,≥1 時,系統車隊才處于穩定行駛狀態。對臨界阻尼可以設置為1;
可視為領航車輛速度和加速度的權重,0≤≤1;
設定,

若 大于零,那么當S大于零時, 會小于零;當 小于零時, 會大于零,因此滑膜面 會趨近于零。
將式(1)代入式(2),計算得:
對式(1)求導可得:
由公式(3)和(4)可得本車的加速度為:
當車隊中只有兩輛車時,=0,得到如下的傳統二階系統:

為阻尼比,臨界阻尼可以設置為1。因此滑膜面可以簡化為:

則式(5)簡化為:



3 控制模型穩定性
根據式(6)得到第1 輛跟隨車的誤差系統方程為:

第輛跟隨車的誤差與第-1 輛跟隨車的誤差的傳遞函數為:
式中:

為方便后文中對理論的理解,采用以下示例的方法進行闡述,設置一組參數如下:

由式(9)可以得出,第1 輛跟隨車的誤差為過阻尼自由振動系統,其誤差響應輸出與系統輸入無關,只與系統的初始條件有關,將誤差微分方程寫成狀態方程形式:

利用matlab 對傳遞函數的初始條件下的幅值響應特性進行分析,得出系統的位置誤差響應和速度誤差響應曲線如下圖1 所示。
從圖1 中可以得出,給定初始位置誤差和速度誤差,系統最終都會收斂到0,而且位置誤差的收斂過程不存在振蕩,這得益于系統為過阻尼系統。從式(9)中可以得出,第一輛跟隨車的誤差的收斂特性只與系統阻尼比和ω帶寬頻率有關,而與參數無關。
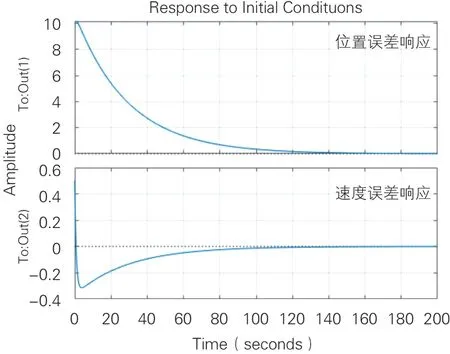
圖1 幅值響應曲線
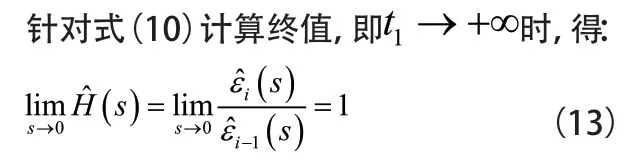
由式(9)的推理已經得出第1 輛跟隨車誤差始終會收斂為0,并依據式(13)遞推,可以得出整個系統的跟隨車輛的誤差都將收斂為0(從圖1 位置和速度誤差響應曲線可以看出),說明系統是穩定的。
4 實車測試數據
為驗證多車協同式編隊系統控制策略的穩定車間距跟車特性,本文作者在長沙智能網聯汽車測試區使用兩臺陜汽德龍X6000 帶掛重卡空載工況下進行編隊自動駕駛實車測試。為驗證控制模型的有效性,設計測試用例如下:
采用工控機和ubuntu16.04 嵌入式操作系統作為計算平臺、公司自研的車聯網設備和百度apollo 的開源自動駕駛系統軟件架構搭載控制器程序,計算平臺輸出的控制命令對車輛的油門、剎車和方向盤進行控制。
選擇測試路段為測試區的高速路段,路段長度2.2km。采用第一臺車人開,第二臺車采用協同式編隊自動駕駛,自動駕駛過程為啟動、加速、巡航、減速、停車。
通過記錄和分析自動駕駛跟隨車輛與前車的速度、位置誤差、速度誤差,驗證控制模型的有效性。
自動駕駛跟隨車與前車速度對比曲線、速度誤差曲線、位置誤差曲線分別如下圖2、3、4 所示:
圖2為自動駕駛跟隨車與前車的速度對比曲線,曲線描述了車輛從起步、加速、巡航、減速、急停車的兩車速度變化過程。圖3 為兩車的速度誤差曲線,圖4 為兩車的位置誤差曲線,位置誤差計算時設定跟車安全距離為30m,描述的是整個過程中穩定間距30m的誤差變化情況。從實車數據曲線分析可以看出,自動駕駛跟隨車輛能良好跟隨前車啟動、加速、減速、巡航、停車,從起步加速到72km/h 過程中速度誤差波動不超過2m/s,位置誤差不超過10m。72km/h 巡航狀態下的速度誤差不超過0.5m/s,位置誤差不超過2m。試驗結果表明各項控制指標滿足標準要求,車隊在加減速過程中,控制系統未發散。
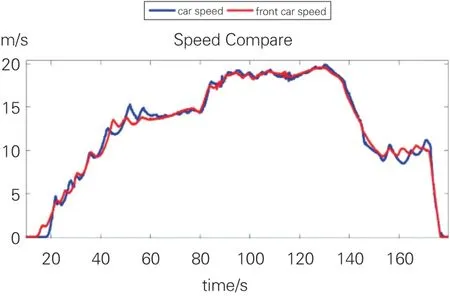
圖2 速度對比曲線

圖3 速度誤差曲線
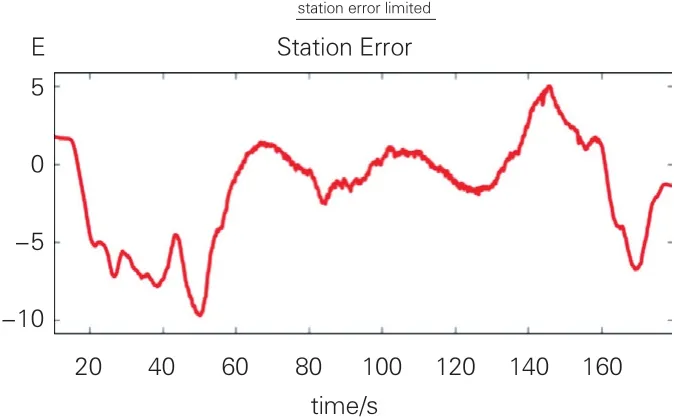
圖4 位置誤差曲線
5 結論
本文提出一種基于首車和前車的駕駛行為(位置、速度、加速度)提出一種滑模控制策略,嘗試解決多車協同控制在首車速度發生變化時車隊間距出現發散的問題。設計過程包括問題提出、滑模模型分析、控制模型穩定性分析、測試用例設計和實車測試驗證。從設計過程和實車測試的數據分析結果來看,本文設計的控制策略利用車車通信傳輸的前車信息能實現車隊跟隨車輛快速響應,具備實際應用價值。作者未來的工作將側重于從實車運行效果和理論角度對控制模型進行更詳細的分析和優化。將研究不同車輛載重、不同型號車輛底盤對車隊穩定車距控制的影響。此外,還將使用更多的協同式車隊控制模型,將所提出的控制模型的性能與其他方法進行比較。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
