基于PS0的模糊PID與自抗擾耦合控制的調平系統仿真研究
2022-02-22 01:07:20徐鳳乾田勇王天義
電腦知識與技術 2022年36期
關鍵詞:優化算法
徐鳳乾 田勇 王天義
關鍵詞:載重平臺;液壓同步控制;聯合仿真;優化算法
中圖分類號:TP311 文獻標識碼:A
文章編號:1009-3044(2022)36-0008-04
隨著我國工業化建設的不斷發展,液壓調平控制系統的研究得到逐步完善,廣泛應用于工業、農業、畜牧業等領域[1]。隨著工作對象對調平控制的要求越來越高,液壓控制系統不僅需要具有較好的安全性和穩定性,還應具備高精度和高效率[2]。
截至目前,模糊PID 已經經歷了半個世紀的發展,雖然被廣泛應用于各行各業,但是依舊存在精度低等亟待解決的問題[3-4],尤其是當遇到單輸入多輸出以及多輸入多輸出等復雜的系統模型時,傳統的模糊PID效果很不理想,具有較大的動態誤差。因此,因此本文提出了一種基于PSO的模糊PID與自抗擾耦合控制,能很大程度地彌補模糊PID的控制缺陷。并采用AMESim與Simulink聯合仿真的方法,對載重平臺液壓調平控制系統進行仿真分析,得出在不同控制策略下系統的性能對比分析,驗證了基于PS0的模糊PID與自抗擾耦合控制在優化液壓載重平臺調平跟蹤誤差的有效性。
1 調平方案設計
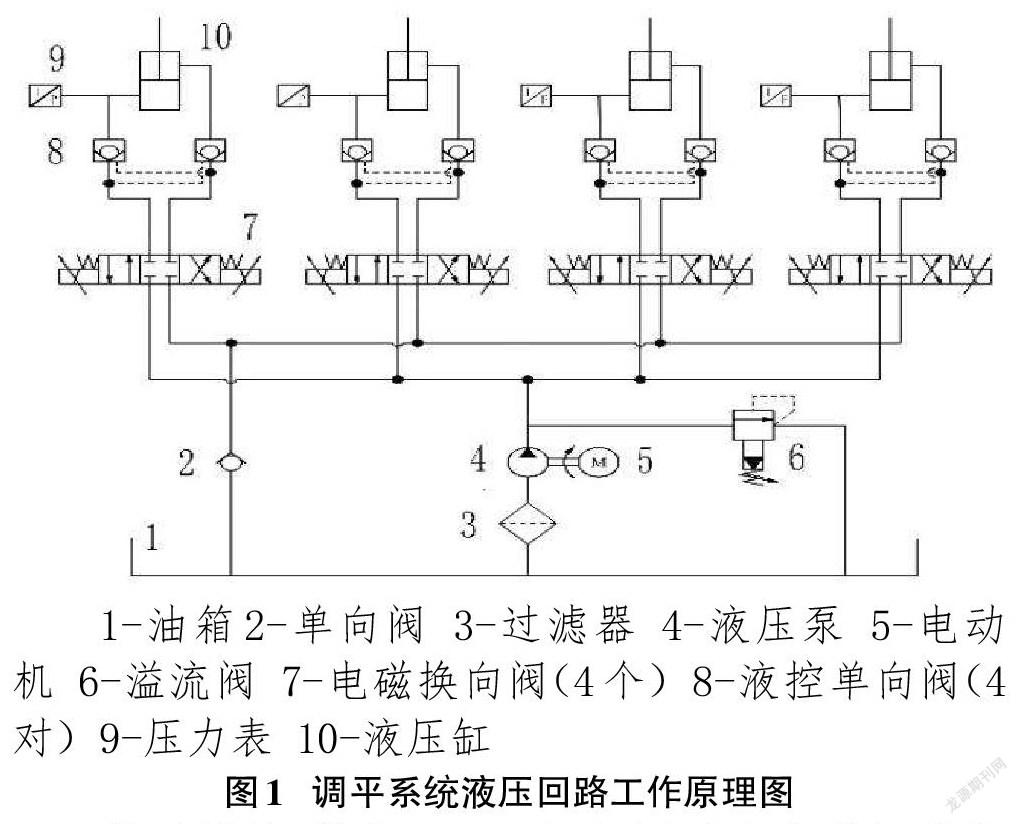
1.1 調平系統液壓回路
本文采用電液伺服閥通過液控單向閥控制液壓缸的方式。調平系統液壓回路如圖1所示。
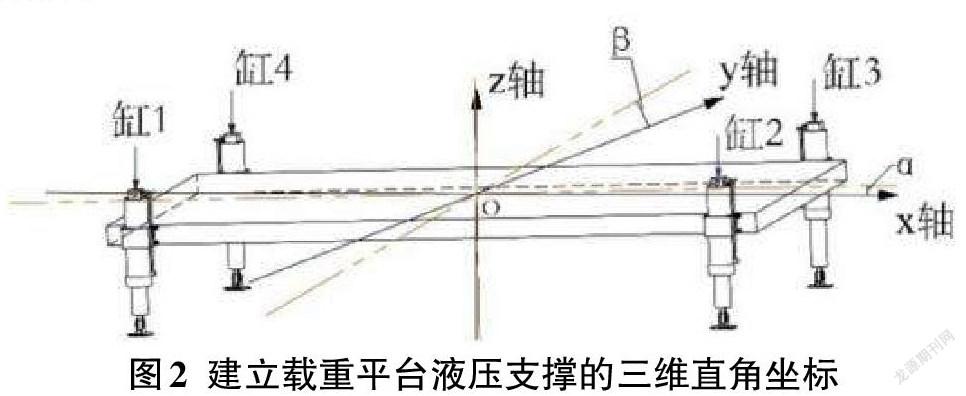
1.2 調平策略分析
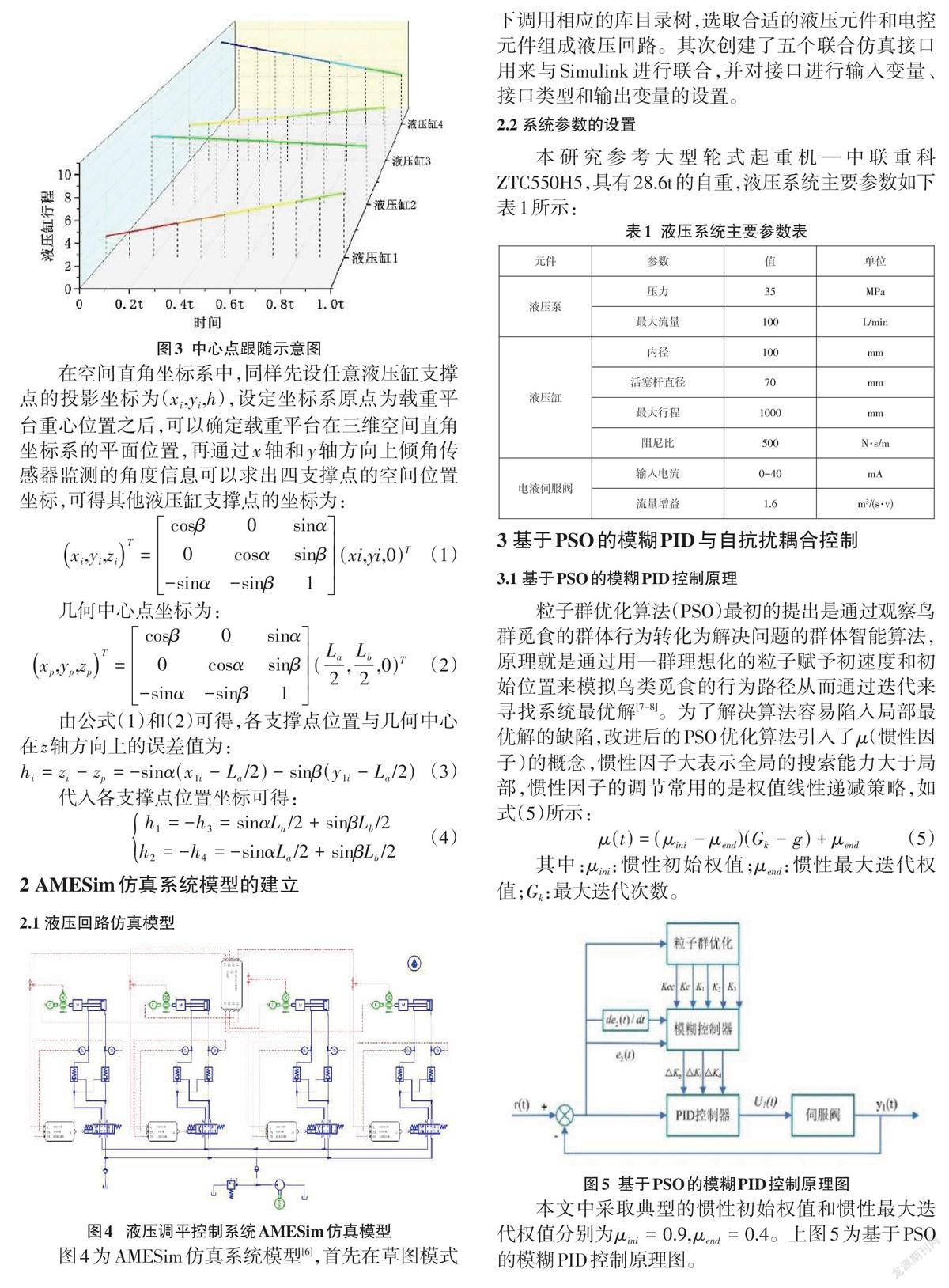
調平策略就是通過調節各個液壓支撐而使載重平臺達到水平或者平行于工作面的控制策略[5],為了便于分析和研究,將載重平臺進行簡化并建立空間直角坐標系,如圖2所示。中心點跟隨是目前使用最多的調平策略,它在調平過程中整體調平行程短,其原理是液壓載重平臺始終保持中心點位置不變,中心點位置即為載重平臺的幾何中心。跟隨動作如圖3所示:
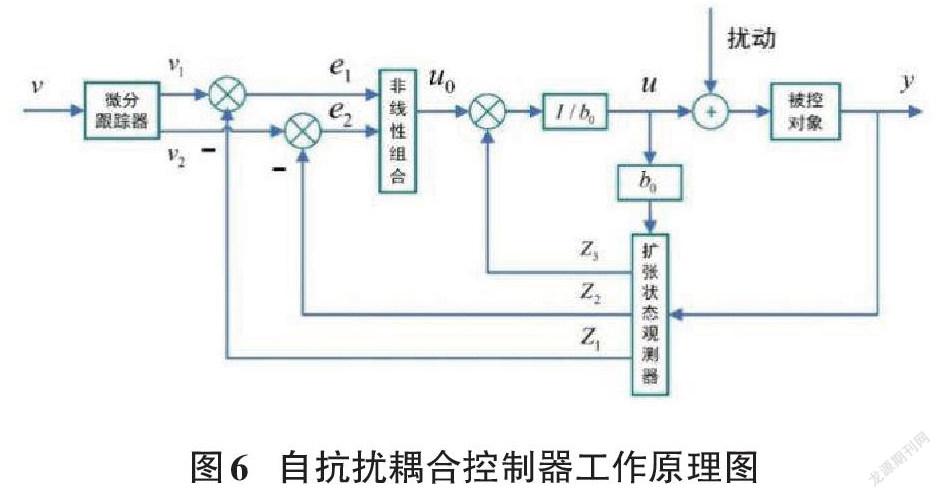
3.2 自抗擾控制原理
自抗擾控制器主要由微分跟蹤器、校正反饋控制器和擴張狀態觀測器三個部分組成,它的工作原理圖如下圖6所示。其中非微分跟蹤器可以提取輸入信號v 并降噪,具有較強的抗干擾能力;非線性校正反饋控制器(NLSEF)可以減少系統對控制過程中產生干擾的敏感性,可以隨時控制系統的動態瞬時響應,增強系統的穩定性;擴張狀態觀測器主要是用來監測系統未建模部分可能產生的外部未知擾動,然后提前抵消擾動,實現系統的動態實時反饋。
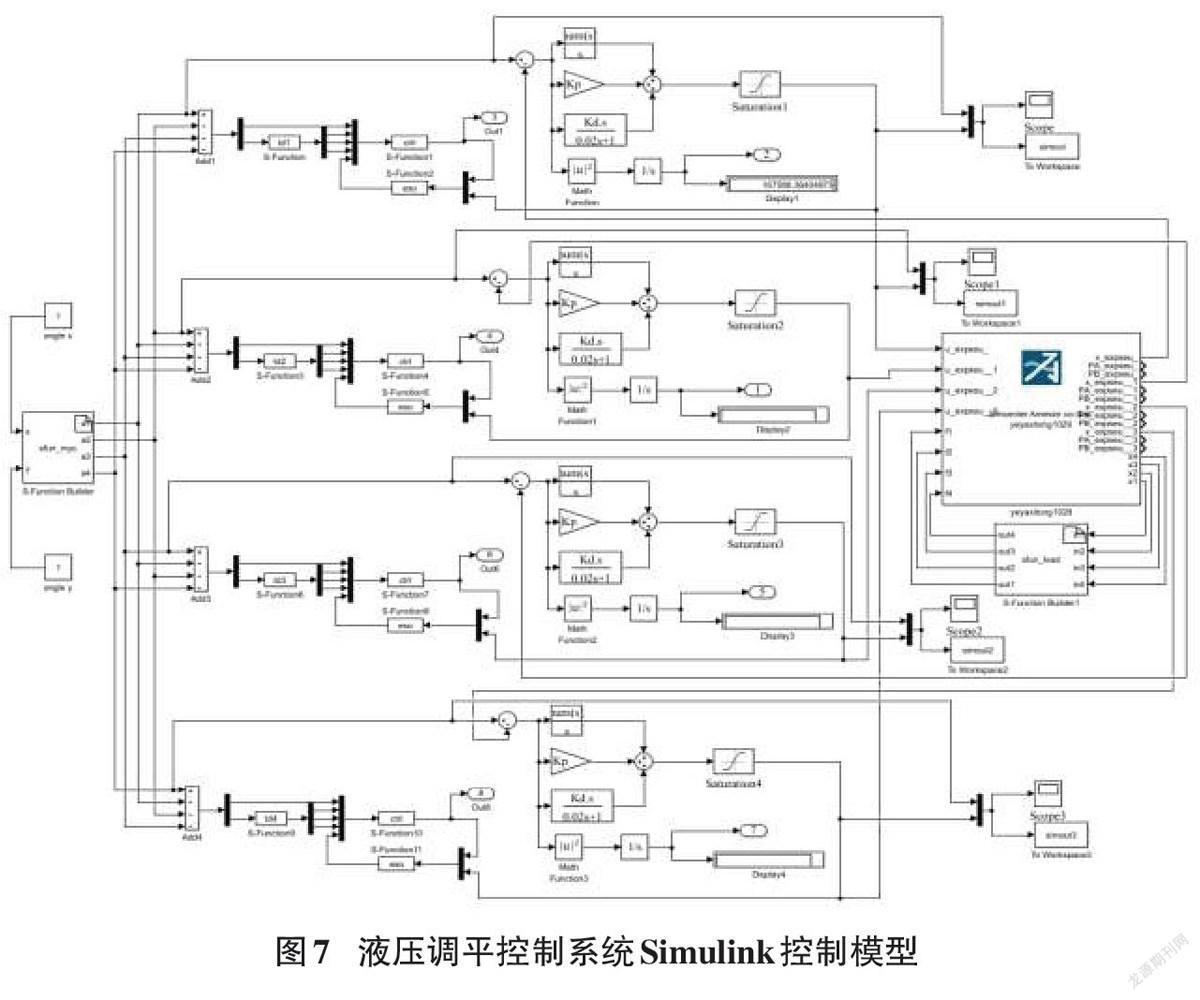
3.3 基于Simulink 搭建耦合控制模型
將基于PSO的模糊PID控制與自抗擾進行耦合控制,并在Simulink中搭建控制模型如圖7所示。
4 系統聯合仿真
為了探究基于PSO的模糊PID與自抗擾耦合控制與傳統模糊PID控制的穩定性區別,將基于PSO的模糊PID與自抗擾耦合控制下的液壓調平系統分別進行階躍信號測試和正弦信號測試,并對傳統模糊PID控制下的跟隨曲線進行對比分析。
4.1 階躍信號下控制結果對比
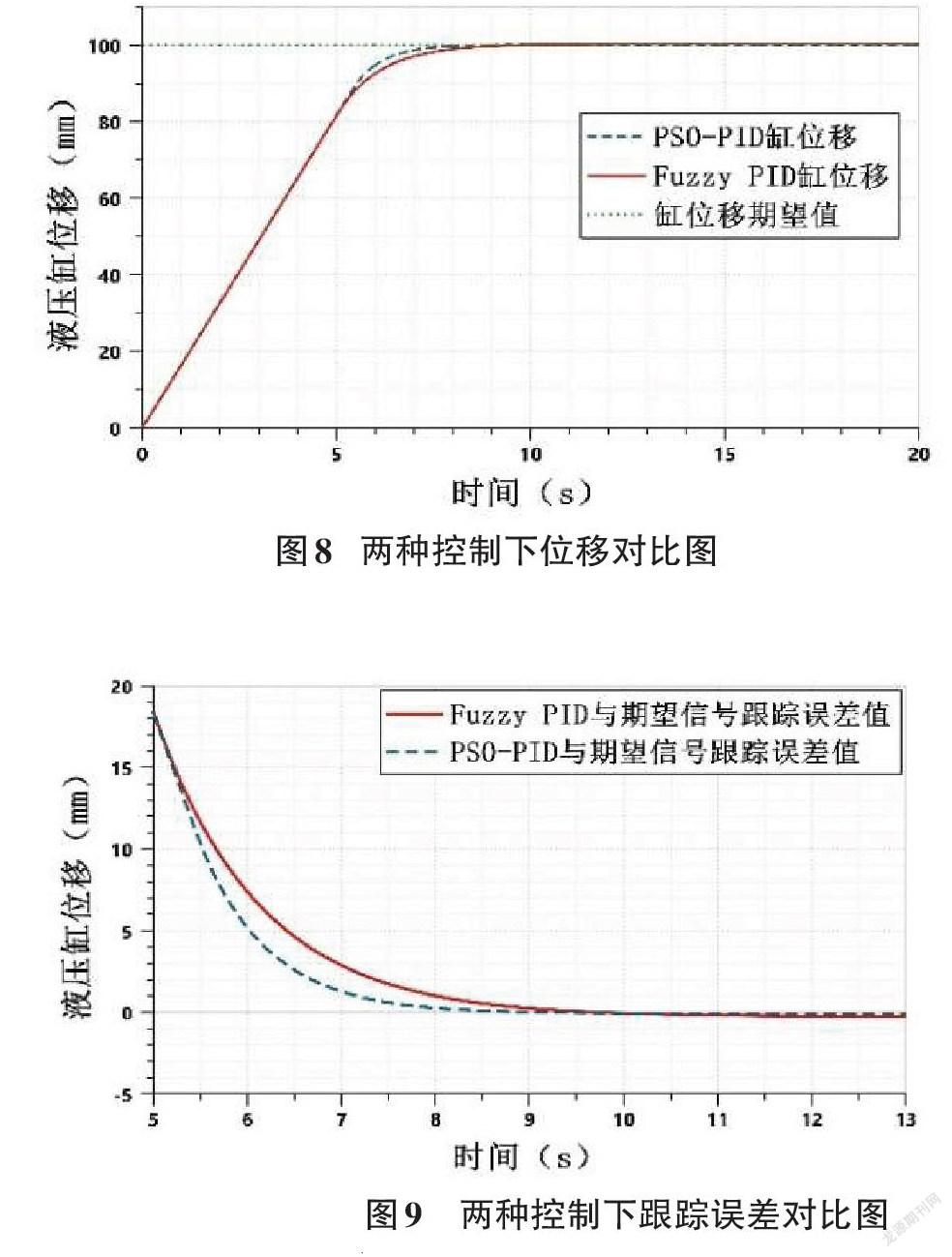
當期望信號為階躍信號時,用傳統的模糊PID控制和基于PSO的模糊PID與自抗擾耦合控制分別對液壓調平系統進行控制,將兩種控制下液壓缸的位移曲線與期望曲線進行對比,如下圖8所示,可以看出,在0s-5s左右,兩種控制下的液壓缸位移保持一致,接著在5s-10s,可以看出在PSO-PID的控制下,液壓缸位移更加快速地接近于缸位移期望值。
為了更明顯地觀察兩種控制下的液壓缸跟蹤誤差,將兩種控制下的液壓缸位移與缸位移期望值進行比較,得出跟蹤誤差值,并截取有明顯區別的5s-13s 區間,如圖9所示。
可以看出,在PSO-PID控制下系統運行7.5s就能保證誤差小于0.5mm,在Fuzzy PID控制下則需要9s,節省了1.5s 的跟蹤時間。這說明當期望值為階躍信號的情況下,基于PSO的模糊PID與自抗擾耦合控制比傳統的模糊PID控制具有更小的跟蹤誤差和更快的響應。
4.2 正弦信號下控制結果對比
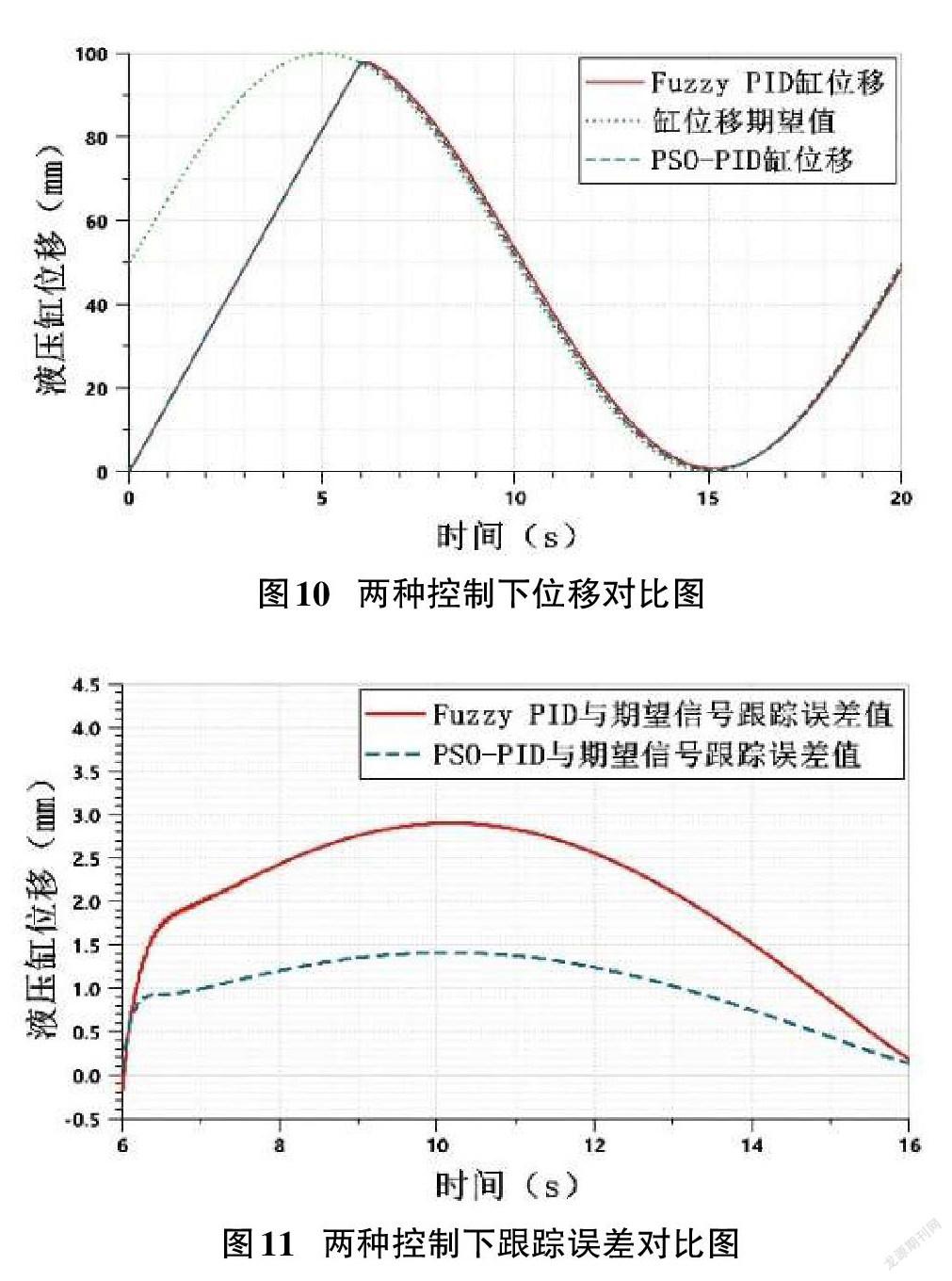
當期望信號為正弦信號時,用傳統的模糊PID控制和基于PSO的模糊PID與自抗擾耦合控制分別對液壓調平系統進行控制,將兩種控制下液壓缸的位移曲線與期望曲線進行對比,如下圖10所示。可以看出在0s-6s,兩種控制下的液壓缸位移保持一致,接著在6s-15s,可以看出在PSO-PID的控制下,液壓缸位移更加快速的接近于缸位移期望值。
為了更明顯地觀察兩種控制下的液壓缸跟蹤誤差,將兩種控制下的液壓缸位移與缸位移期望值進行比較得出跟蹤誤差值,并截取有明顯區別的6s-16s區間,如圖11所示:
可以看出,在6s-16s區間內,PSO-PID控制策略下的系統運行誤差始終小于1.5mm,在Fuzzy PID控制下則達到了3mm的誤差值。這說明當期望值為正弦信號的情況下,基于PSO的模糊PID與自抗擾耦合控制比傳統的模糊PID控制的跟蹤誤差約降低了50%。
5結論
本文以液壓載重平臺為研究對象,對平臺的調平和控制策略進行研究。隨著目標對精度和效率的要求越來越高,對平臺的效率、穩定性和通用性也提出了新要求。針對目前的液壓調平系統存在非對稱性誤差、調平策略單一和控制容易陷入局部最優等問題。以AMESim與Simulink聯合仿真平臺為載體,通過對液壓系統、調平策略和控制等多角度分析和優化,提出了一種基于PSO的模糊PID和自抗擾耦合控制的液壓調平系統。從以上分析可以得出,基于PSO的模糊PID與自抗擾耦合控制比Fuzzy PID控制具有更高的系統穩定性、更快的速度響應和更小的位移跟蹤誤差。能夠有效地降低同步誤差以及速度振蕩的問題,有助于推進工業現代化發展朝著精密化的方向發展,對后續的研究和生產具有一定的指導意義。
猜你喜歡
課程教育研究·新教師教學(2016年6期)2017-04-10 00:22:41
數字技術與應用(2017年2期)2017-04-08 09:30:10
電子技術與軟件工程(2017年4期)2017-03-27 13:49:48
湖南師范大學學報·自然科學版(2017年1期)2017-03-14 16:08:34
科技與創新(2017年1期)2017-02-16 19:36:23
科技創新導報(2016年21期)2016-12-17 13:07:48
計算機時代(2016年7期)2016-07-15 16:12:30
現代經濟信息(2016年4期)2016-06-20 18:29:48
科技與創新(2016年7期)2016-04-20 09:17:04
科技傳播(2016年3期)2016-03-25 00:23:31
