面向豬舍環境的感知機器人系統和改進綜合評價模型設計
2021-12-30 07:34:58李嘉豪劉飛飛伍昕宇陳鑫宇
東北農業大學學報 2021年11期
李嘉豪,劉飛飛,伍昕宇,陳鑫宇
(1.江西理工大學機電工程學院,江西 贛州 341000;2.江西理工大學電氣工程與自動化學院,江西 贛州 341000)
隨著農業產業結構調整,生豬養殖業正向規模化、集約化、工廠化方向發展,在優化農村經濟結構、提高農業效益,增加農民收入方面具有重要作用[1]。然而目前中小型生豬養殖場管理方式仍存在疾病防控難、環境檢測成本高等問題[2-3]。
精準畜牧業利用先進科學技術,實現資源高效利用,在提高生產效率基礎上,改善動物和養殖者福利條件,是改變傳統畜牧養殖業生產方式的新模式。物聯網技術在智慧交通、智慧城市、智能家居等人類社會生活各個方面均有應用[4-5]。針對規模化豬舍環境精準檢測問題,國內外學者研發多種類型環境監控系統,以提高豬舍環境檢測自動化水平。Hwang等為減少口蹄疫疾病,設計了一套豬舍監管系統,實時采集豬舍中的環境參數,通過分析病發前后環境變化,預防疾病爆發[6]。朱偉興等利用Zigbee無線通信技術,將豬舍內無線傳感器設備組成傳感器網絡,并利用ARMLINUX嵌入式技術控制,實現豬舍環境遠程監控[7]。周麗萍等設計一套無線傳感器網絡系統,系統傳感器分布式安裝在豬舍內,接收終端安裝在巡檢車上,利用WIFI無線通信技術收集豬舍溫濕度、硫化氫氣體濃度、氨氣濃度、大分子顆粒物數值等數據,實現豬舍養殖環境遠程管理和調控[8]。但目前研究大多將異質傳感器分布式安裝在豬舍內,實現舍內環境參數多點連續檢測,隨著養殖規模擴大,成本升高,影響生豬養殖場經濟效益。因此,針對人工管理豬舍存在疾病防控難、環境檢測成本高等問題,本文將結合物聯網技術、機器人技術及無線通信技術設計一套中小規模豬舍環境感知機器人系統,實現豬舍多區域環境參數準確檢測及調控,提高生產效率。
1 系統整體方案
本文設計的豬舍環境感知機器人系統在邏輯層面上分為三大部分:現場環境監控子系統、WIFI無線網絡基站和遠程監控中心。豬舍環境監控系統總體框架如圖1所示,現場環境監控系統分為兩大模塊:環境感知機器人模塊和環控設備控制器模塊。
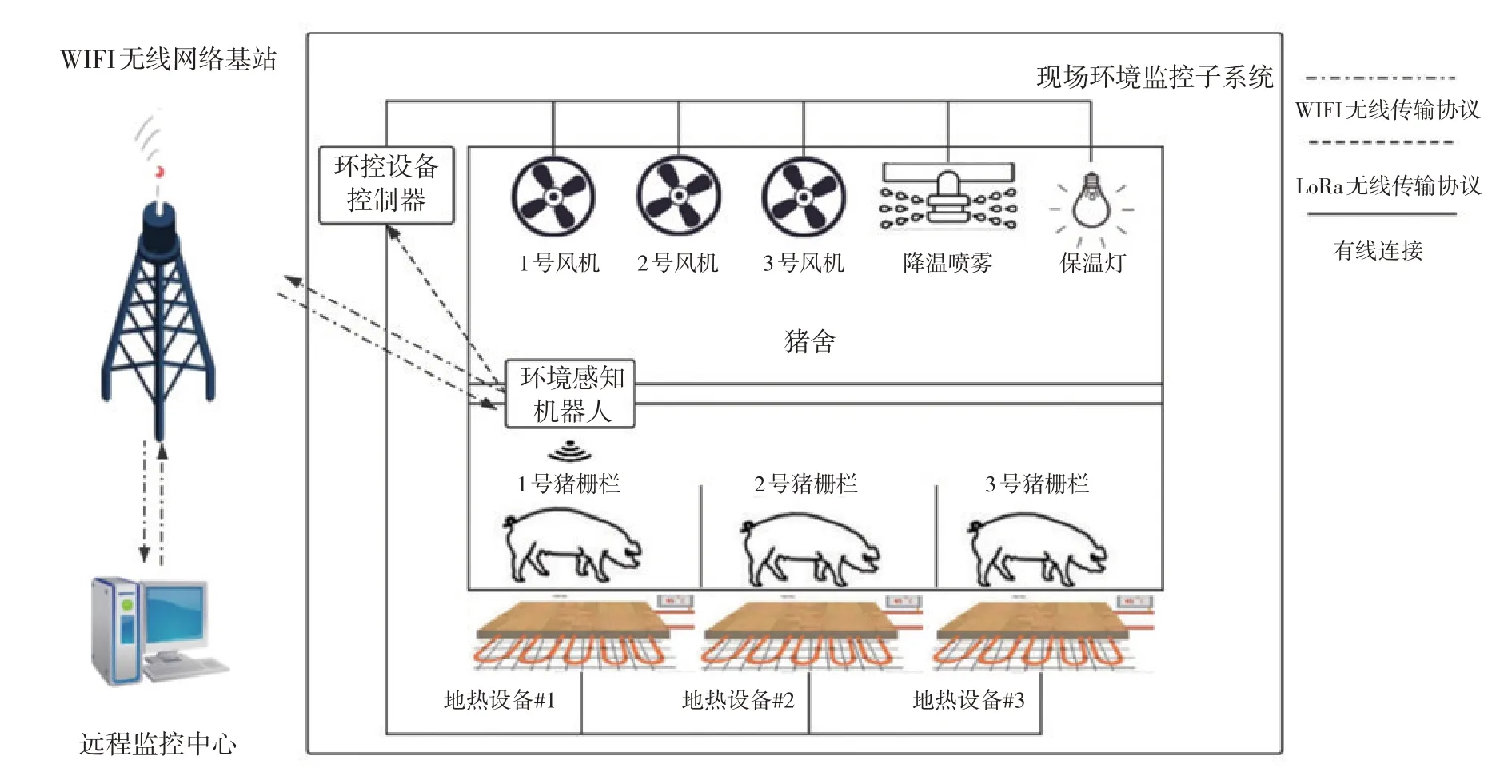
圖1 豬舍環境監控系統總體框架Fig.1 Overall framework of piggery environmental monitoring system
環境感知機器人模塊中,環境感知機器人在懸掛式軌道上收集豬舍環境實時數據及生豬圖像,并通過多模態通信方式向WIFI無線網絡基站和環控設備控制器傳輸數據信息。環境感知機器人內部搭載收集氨氣、空氣溫濕度、光照強度等環境參數的傳感器。其中溫濕度傳感器采用DHT22溫濕度模塊,每次工作返回一個40 bit溫濕度數據,溫度測量范圍-40~80℃,精度±0.5℃,濕度量程范圍0~99.9%RH,精度±2%RH。氨氣濃度傳感器采用MQ-137氨氣檢測模塊,硫化氫氣體濃度傳感器采用MQ-136,MQ-136和MQ-137的信號均以熱敏電阻阻值輸出,通過電路轉換后,將電阻值轉換成電壓信號,MQ-136檢測范圍10-6~10-4mg.m-3,MQ-137檢測范圍5×10-6~5×10-4mg.m-3。光照強度傳感器采用GY-30感光模塊,內置16 bit AD轉換器直接數字輸出,檢測光照強度范圍0~65 535 lx。二氧化碳傳感器采用MG811模塊,數據信號以模擬電壓的信號輸出,檢測范圍0~10-2mg.m-3。
LoRa下位機通訊模塊收發器采用SX1278無線模塊,LoRa下位機通訊模塊分為LoRa主節點和LoRa終端節點,LoRa主節點內置于環境感知機器人內部,LoRa終端節點內置于環控設備控制器中。環境感知機器人將現場采集數據通過LoRa無線通訊傳輸給環境設備控制器。將LoRa無線通信技術作為環境感知機器人與環控設備控制器通信方式,無需布線,傳輸距離遠,易安裝調試。
WIFI網絡通信模塊采用esp8266無線網橋模塊,該模塊采用IEEE 802.11b無線標準,無線傳輸速率可達11 Mbps,使用WIFISTA模式并設置通信端口號,將環境感知機器人采集的數據傳輸到自行架設WIFI基站中。
環控設備控制器中搭載LoRa終端節點實現與環境感知機器人數據交互,數據包接收后環控設備控制器開展解包工作,提取環境感知機器人檢測的豬舍環境數據,并生成對應環境控制指令,最后根據指令控制繼電器模塊。繼電器模塊連接用于降低生豬養殖場內氨氣濃度的交流負壓風機,用于升溫的地熱供暖設備,用于降溫和加濕的噴霧裝置和用于控制光照強度的豬舍養殖保溫燈,控制不同環控設備,實現實時環境控制。
用戶可通過TCP/IP通信方式與WIFI基站端口建立通信,實時接收豬舍溫度、濕度、氨氣濃度、硫化氫濃度、二氧化碳濃度、光照強度傳感器數據與攝像頭的視頻流,實現豬舍環境遠程長時間連續檢測與調控。
2 環境感知機器人模塊設計
豬舍環境復雜,由溫度、濕度、光強、有害氣體和顆粒物等環境參數相互耦合而成,各個環境參數具有時變性、非線性特點,在同一時刻不同位置的環境參數可能存在較大差異[9-11]。因此本文環境感知機器人搭載多種異質傳感器,在懸掛式軌道上設置對應監測點,環境感知機器人達到該點時便開始環境數據采樣、處理、融合,并通過多模態通信方式將數據發給環控設備控制器終端和WIFI無線網絡基站,實現長時間連續檢測,降低生豬養殖場環境檢測成本,實現豬舍無人化檢測與遠程監控。
2.1 環境感知機器人機構設計
豬舍內部框架根據場地大小和養殖需要分為單列、雙列及多列式規劃,中小型豬場大多數采用雙列式,多種類型豬舍內部框架見圖2。雙列式豬舍保溫良好,管理方便,有效控制環境條件、提高勞動效率和養豬生產水平,但雙列式豬舍中過道交互錯雜且雜物較多,地面常因清理生豬排泄物而潮濕,使用傳統輪式機器人巡檢存在極大隱患,因此在行走方式上選擇軌道懸掛式,避免地板潮濕環境,又多角度觀察生豬狀態。環境感知機器人運動參數參考豬舍管理人員在管理豬舍時的實際運動參數,通常檢查豬舍的行走速度1.5 m.s-1,環境感知機器人速度可略快人行走速度,故選擇機器人的行走速度為2 m.s-1,加速度參考汽車啟動加速度2.78 m.s-2選擇2 m.s-2,環境感知機器人根據功能性原則和防松性原則,為防止機架產生過大形變導致運動功能失效等問題發生,將環境感知機器人的機架最大形變量規定小于2 mm,環境感知機器人需要實現豬舍環境參數的精準測量及提高數據可靠性,需要在環境參數采集和處理階段采用不同的算法,故規定環境感知機器人的參數檢測誤差小于0.5%,軌道因環境感知機器人運行軌道因環境感知機器人重量而發生局部變形,過大的軌道形變會嚴重影響環境感知機器人的使用壽命,對豬舍管理安全造成威脅,故規定環境感知機器人的向下最大型變量不超過軌道總長的1/250。根據以上實際需求制定環境感知機器人主要技術參數:速度為2 m.s-1,加速度為1.5 m.s-2,機架最大變形量≤2 mm,參數檢測誤差≤0.5%,軌道最大變形量≤1/250。
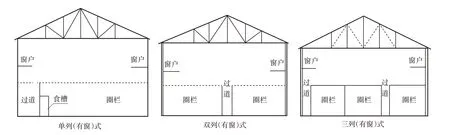
圖2 多種類型豬舍內部架構Fig.2 Internal structureof varioustypesof piggery
由于中小型生豬養殖場的實際需求及豬舍潮濕的生態環境,要求環境感知機器人能在潮濕環境下長時間運行以滿足豬舍環境無間斷檢測需求[12],但傳統工字鋼軌道和鋁合金軌道在易腐蝕且安裝難度大,所以本文采用直徑50 mm、厚度2.4 mm的PVC管道作為環境感知機器人軌道,克服軌道在潮濕環境下易腐蝕的缺陷。
環境感知機器人包含無刷直流電機、編碼器、ARM控制器、溫濕度傳感器、氨氣傳感器、硫化氫氣體傳感器、二氧化碳濃度傳感器、光照強度傳感器、稱重輪、驅動輪、夾緊彈簧等。環境感知機器人機架受夾緊力和外部動態載荷時可能產生形變,為保證環境感知機器人機架穩定,機架材料選擇Q235b,環境感知機器人本體效果如圖3所示。環境感知機器人實際技術參數:重量為3.268 kg,驅動輪直徑為40 mm,速度為2 m.s-1,加速度1.5 m.s-2,驅動功率45.833 W,續航時間72 h。
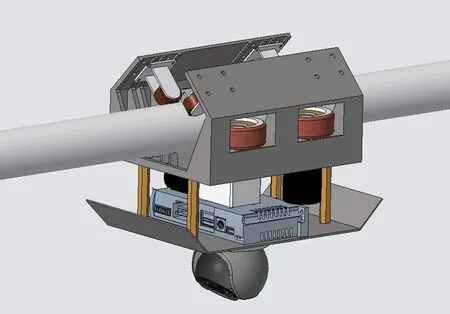
圖3 環境感知機器人結構Fig.3 Environment aware robot structure
2.2 環境感知機器人多模態通信設計
為實現豬舍遠程實時監控和環境控制,環境感知機器人必須具備多種通信方式,本文設計的環境感知機器人集合LoRa無線傳輸和WIFI無線傳輸兩種通信方式。環境感知機器人收集數據后,根據不同通信傳輸任務選擇不同無線通信方式,環境感知機器人與環控設備控制器通信時,選擇LoRa無線傳輸通信方式完成傳感器數據傳輸。環境感知機器人與WIFI無線網絡基站通信時,選擇WIFI無線傳輸通信方式完成傳感器及視頻流的數據傳輸。
2.2.1 LoRa無線通信網絡設計
LoRa無線通信技術由美國Semtech公司推出,是一種將擴頻通信和GFSK調制融合在一起的超遠距離無線傳輸技術。LoRa無線通信技術通信有傳輸距離遠,功耗低、抗干擾能力強等優點,LoRa無線通信無需復雜布線,使用安裝方便。規模化豬舍占地面積較大,室內遮擋物較多,因此環境感知機器人采用SX1276芯片用于LoRa無線通信,該芯片集成32位高性能MCU,32位數據并行傳輸,通信距離高達3 000 m,使用該芯片為LoRa無線通信,可縮短開發周期,降低開發成本,同時增加通信穩定性。
為實現豬舍多區域環境參數準確檢測并及時調控,環境感知機器人控制和環控設備控制器的主控芯片均采用stm32F407IGT6,實時操作系統選擇國產開源操作系統RT-Thread,具有實時性、穩定性、可裁剪性等優點。環境感知機器人內置溫濕度傳感器、氨氣傳感器、硫化氫氣體傳感器、二氧化碳濃度傳感器、光照強度傳感器,將數據采集打包后,通過SX1276芯片發送給內置于環控設備控制器的SX1276芯片,環控設備控制器收集到環境數據后,通過對應繼電器模塊執行上電閉合操作,控制交流負壓風機、地熱供暖設備、噴霧裝置、豬舍養殖保溫燈。LoRa無線通信網絡結構見圖4。
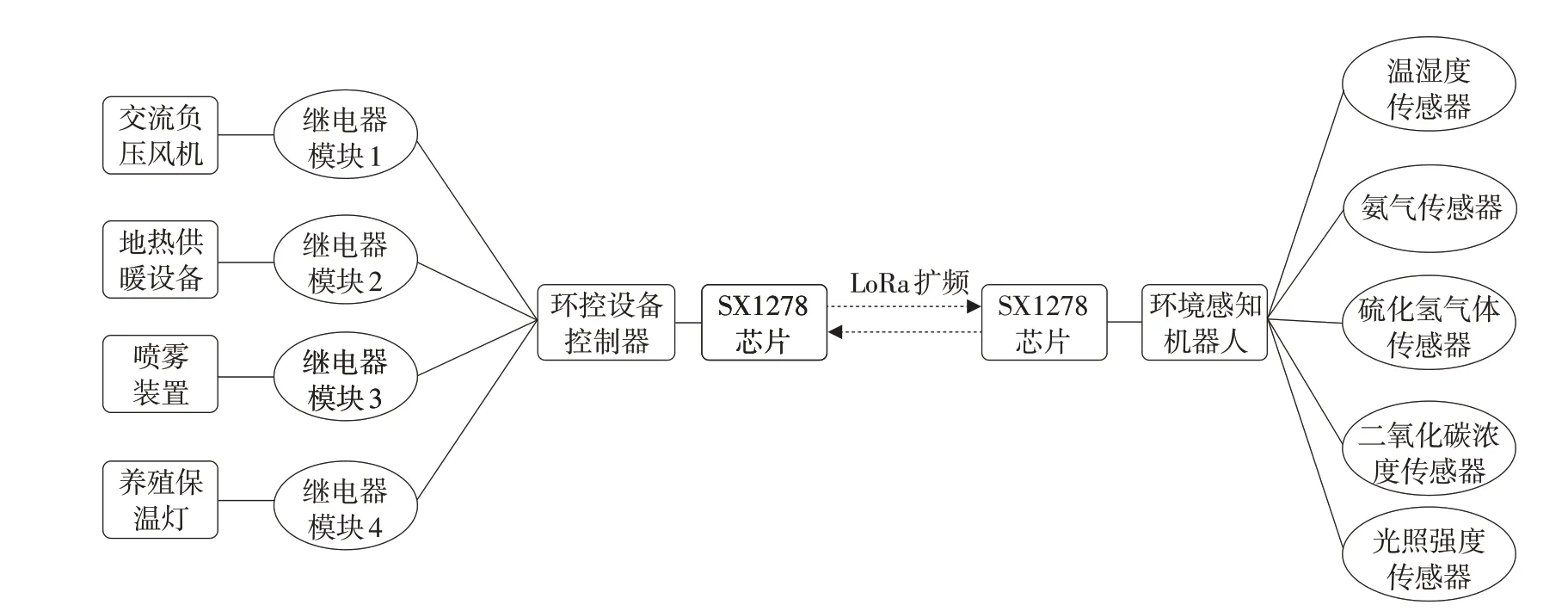
圖4 LoRa無線通信網絡結構Fig.4 LoRa wirelesscommunication network structure
2.2.2 WIFI無線通信網絡設計
為實現用戶遠程監控豬舍環境,本文建立WIFI無線網絡基站,將各個豬舍環境感知機器人與遠程監控中心連接。中小型生豬養殖場在空曠的郊區,信號干擾較少,適合WIFI無線傳輸。環境感知機器人內置esp8266WIFI通信模塊,該模塊采用IEEE 802.11b無線標準,無線傳輸速率高達11 Mbps,內置TCP/IP協議棧實現串口與WIFI之間轉換,支持STA、AP、STA+AP等工作模式,降低環境感知機器人聯網成本。環境感知機器人選用STA模式與WIFI無線網絡基站連接,并將數據發送給WIFI無線網絡基站特定端口號中。遠程用戶通過TCP/IP建立與WIFI無線網絡基站的通訊連接,訪問該端口號實現豬舍遠程環境監控。環境感知機器人的WIFI無線通信流程見圖5。
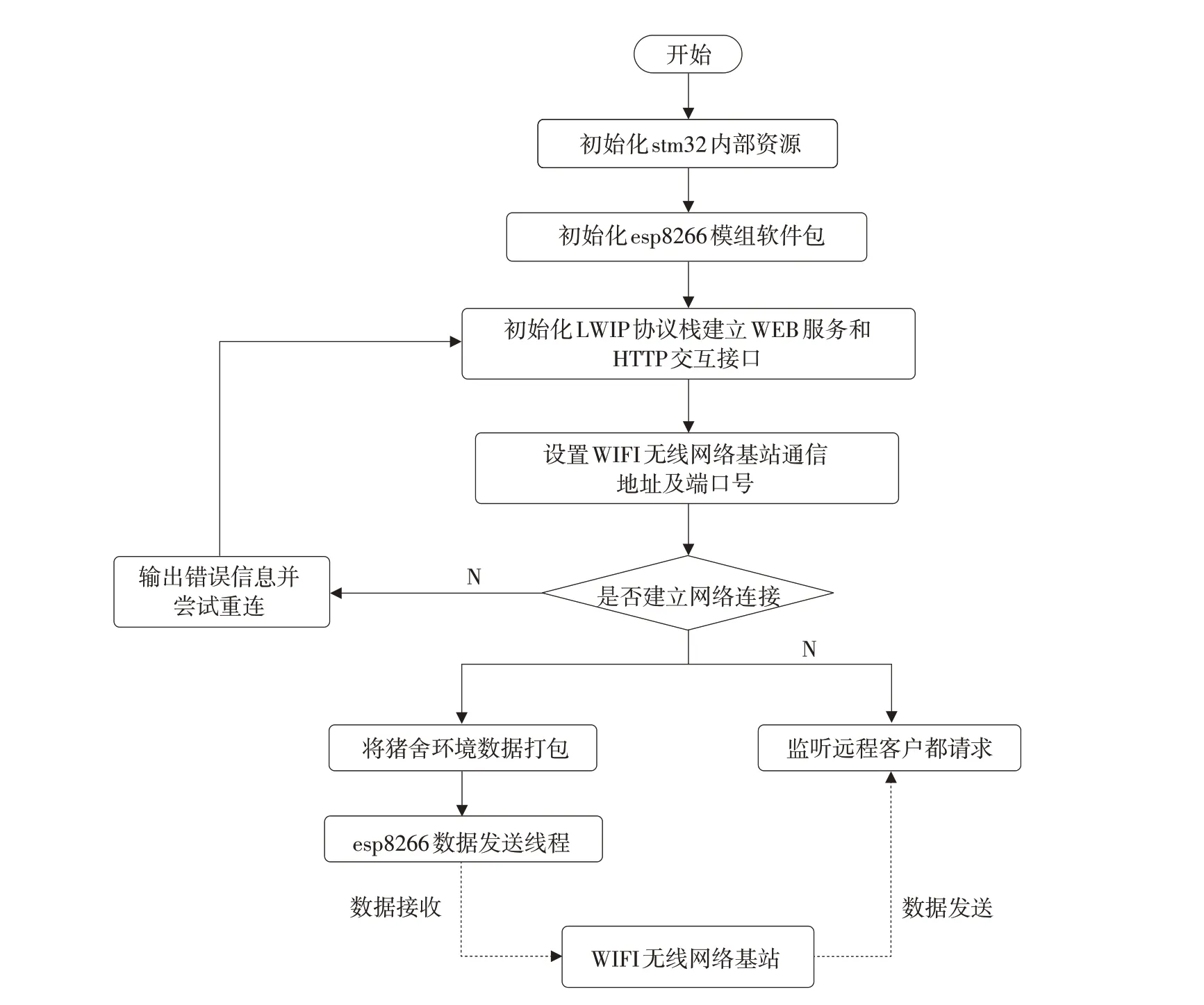
圖5 WIFI無線通信流程Fig.5 WIFI wireless communication flow
2.3 環境感知機器人環境參數采集算法設計
中小型生豬養殖場采用雙列式豬舍,占地空間大,各處溫濕度不同,氨氣濃度不勻,單一位置環境檢測參數無法真實反映豬舍環境參數。本文設計的環境感知機器人在軌道多位置開展環境數據采集工作,并對多位置傳感器數據作融合處理,最后為豬舍環境質量作優劣程度評價時提供數據支持。傳感器數據融合是一種用于數據信息校準、相關、識別和估計的技術,信息處理程度從低到高分為三個層次:數據級融合、特征級融合和決策級融合[13]。本文根據融合程度類型及傳感器數據采集方式,將系統融合算法模型設計成見圖6。本文對環境感知機器人溫濕度、氨氣濃度、硫化氫濃度和光照強度數據在一級融合前采用中值濾波函數,目的是有效減少偶然因素干擾[14-15],之后對環境感知機器人的溫濕度、氨氣濃度、硫化氫濃度和光照強度數據采用卡爾曼濾波算法處理。
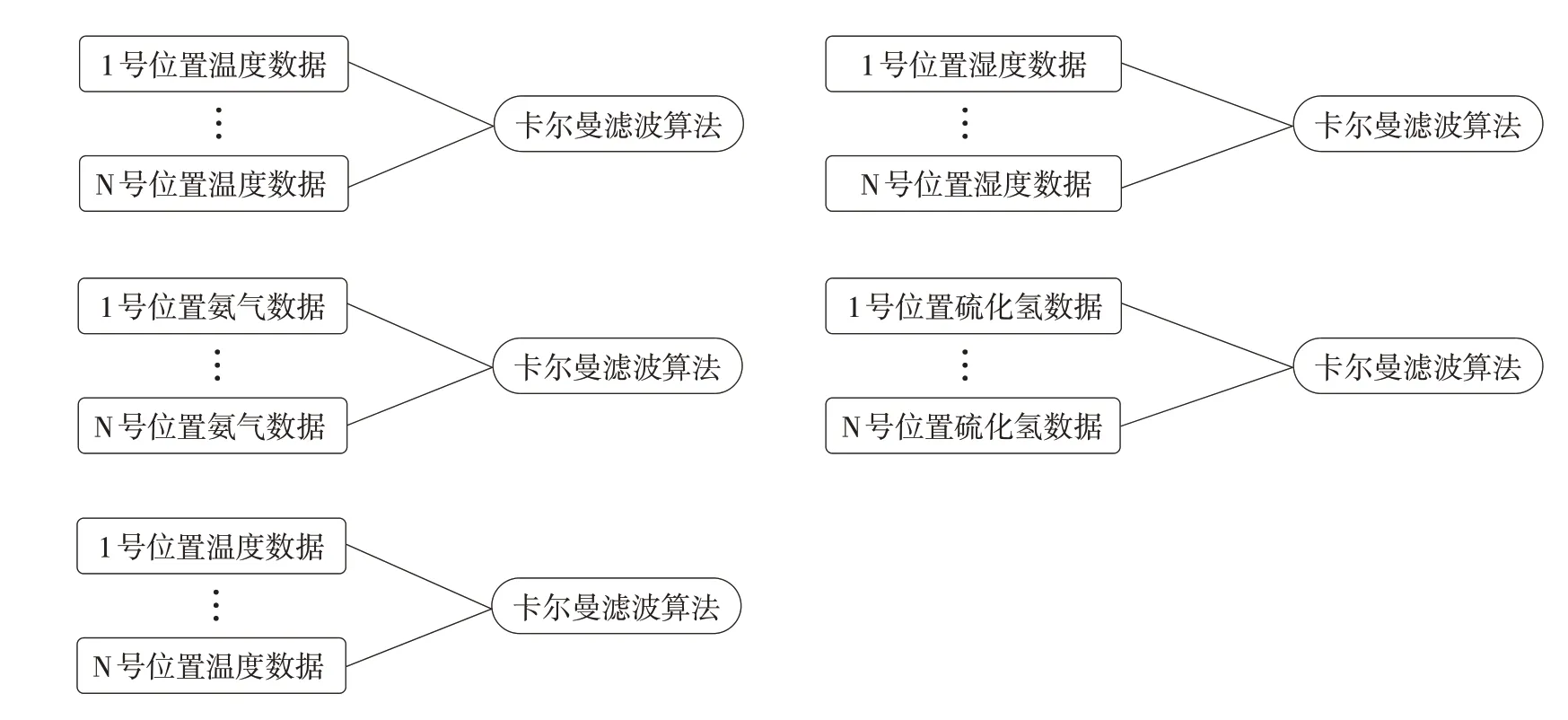
圖6 融合算法模型設計Fig.6 Design of fusion algorithm model
卡爾曼濾波算法有較強容錯性,算法利用測量模型的統計特征確定最佳融合方式和數據估計狀態。卡爾曼濾波算法是貝葉斯濾波算法一種具體實現,貝葉斯算法是根據當前時刻系統狀態測量值和前一時刻控制命令計算出當前時刻系統狀態估計值來推斷此刻狀態值的一種計算方法,但并未提供計算狀態值和估計值可信度的方法,卡爾曼濾波算法假設各個狀態值、噪聲均服從高斯分布,最終得到一個當前系統狀態方程。卡爾曼濾波算法主要步驟如下:
系統當前狀態預測方程如下:

預測結果和真結果間存在誤差,該誤差協方差矩陣方程如下:

式中,Pk|k-1為前一時刻系統預測結果協方差,Pk-1為前一時刻最優系統結果協方差,Qk為噪聲協方差。
卡爾曼增益方程如下:

式中,Kk為卡爾曼增益,Hk為測量矩陣,Rk為噪聲方差。
系統當前最優狀態估計方程如下:

協方差矩陣更新方程如下:

式中,Pk為當前時刻最優系統結果協方差,I為單位矩陣。
根據上述方程,卡爾曼多傳感器融合算法步驟是:①確定系統狀態預測方差與傳感器測量方差;②獲取多個環境感知機器人在不同位置傳感器測量值;③根據式(1)更新系統當前狀態預測方程;④根據式(2)、式(3)更新卡爾曼增益方程;⑤根據式(4)、式(5)估計系統當前最優狀態及更新協方差矩陣。
上述算法在環境感知機器人中程序流程圖如圖7所示。
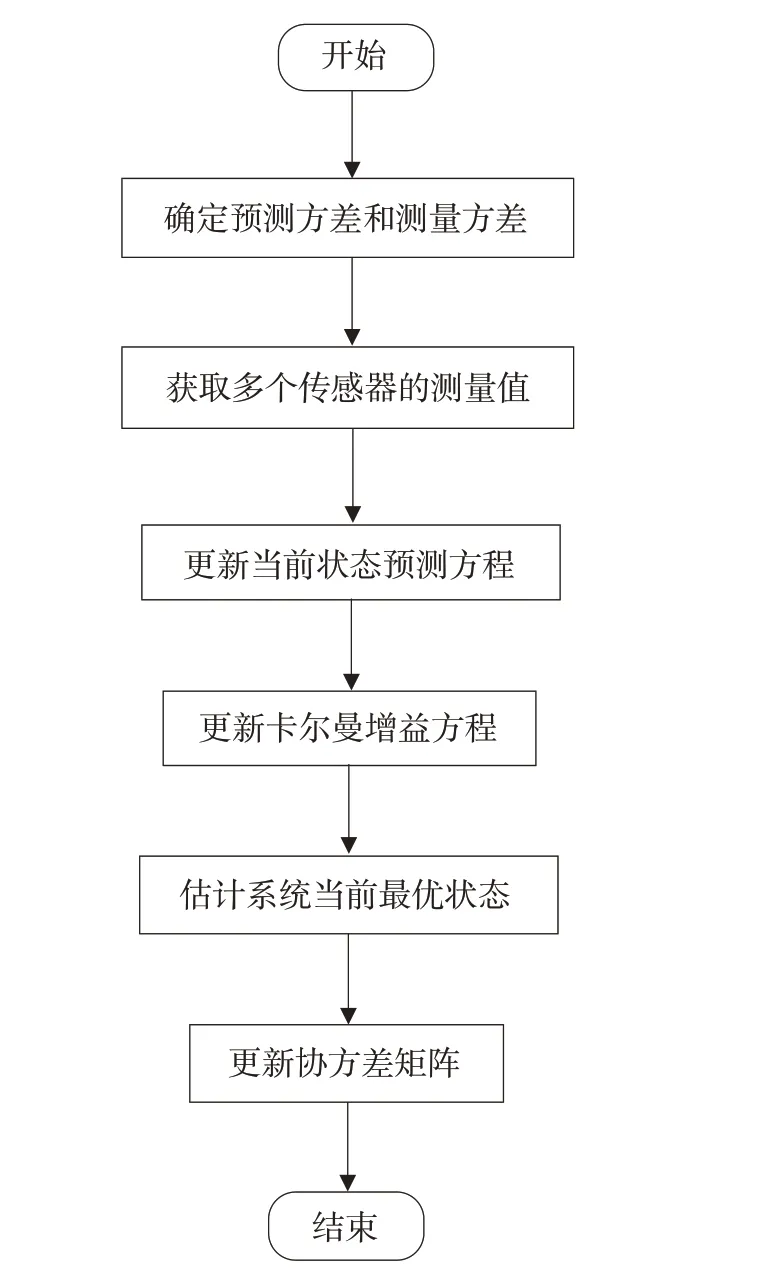
圖7 卡爾曼算法程序流程Fig.7 Flow of Kalman algorithm program
3 豬舍環境評價算法設計及實現
如今規模化、集約化生豬養殖生產中,生豬生產力約20%取決于遺傳因素,40%~50%取決于喂食飼料中營養成分,30%~40%取決于生豬養殖場環境因素。因此,在規模化生豬養殖場營造適合生豬健康生長環境是生豬高效生產力的重要保證[16]。
豬舍環境因素復雜多樣又相互影響,生豬對豬舍環境適應能力存在一定環境因素范圍,因此,無法用一個明確概念描述豬舍環境。本文采用模糊綜合評價算法評價豬舍環境[17],使用熵值法對豬舍環境參數權重賦值,最終為豬舍環控設備調控提供數據支持,設計的模糊綜合算法流程見圖8。
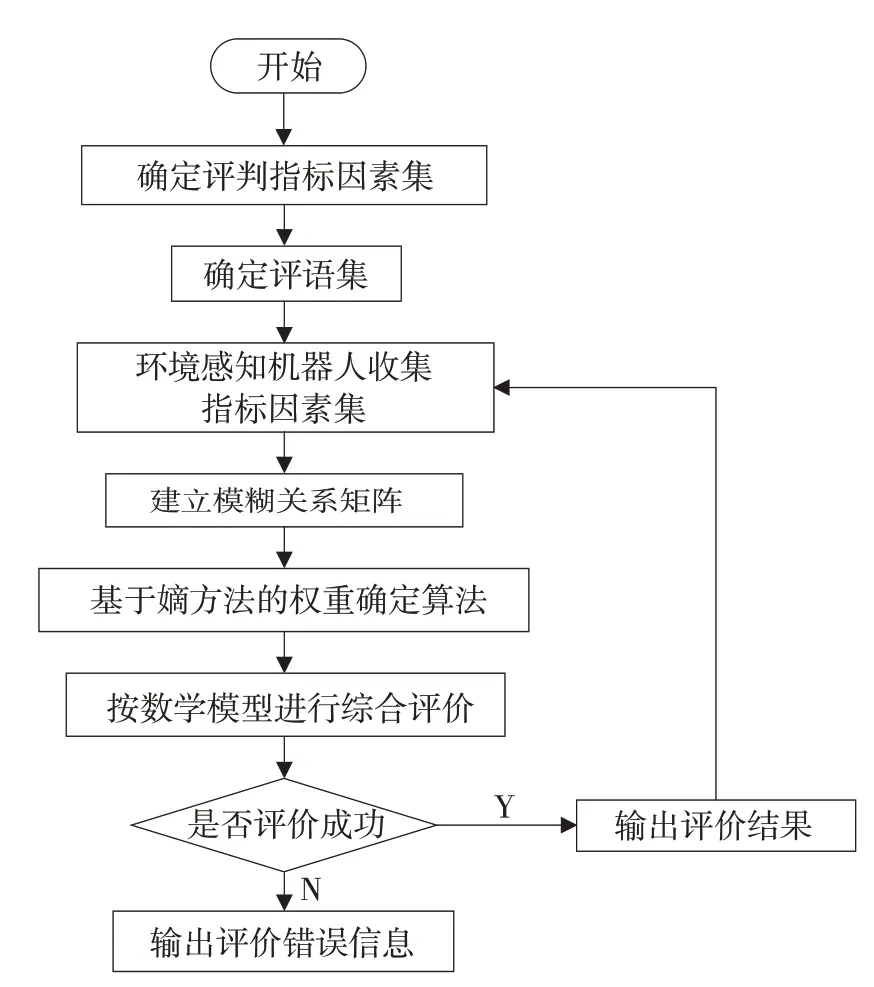
圖8 模糊綜合算法流程Fig.8 Flow of Fuzzy synthesis algorithm
3.1 建立豬舍環境評價矩陣
本文選取對生豬健康生長影響重大環境因素,包括:溫度、濕度、氨氣濃度、硫化氫濃度、二氧化碳濃度作為豬舍環境評價指標,并采用“健康(H)”、“亞健康(M)”和“不健康(U)”描述豬舍環境參數,豬舍環境評價體系如表1所示。

表1 豬舍環境評價體系Table 1 Environmental assessment system of the pig house
根據控制論論文《模糊集》[18],隸屬度函數表示模糊集合元素對評價集從屬程度,取值于[0,1],對于論域U中任意一元素η,都在[0,1]存在一個數ηA與該論域上模糊集A對應,ηA即表示η對模糊集A隸屬度。ηA越接近于1,表示η屬于A的程度越高,ηA越接近于0,表示η屬于A的程度越低。
確定豬舍環境評價矩陣關鍵是確定豬舍環境隸屬函數,通過隸屬函數計算豬舍環境評價集中每個元素隸屬度。
本文隸屬函數模型將根據豬舍環境評價體系選擇梯形型,其表達式如下:
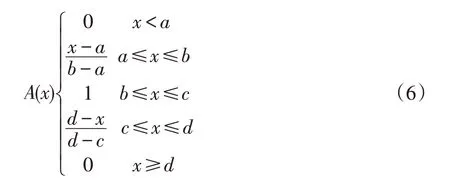
式中,a,b,c,d分別代表評語集中“健康(H)”、“亞健康(M)”和“不健康(U)”分界點,根據豬舍環境評價體系表可建立溫度、濕度、氨氣濃度、硫化氫濃度、二氧化碳濃度隸屬度函數,如圖9所示。

圖9 環境參數隸屬度函數Fig.9 Membership function of environmental parameters
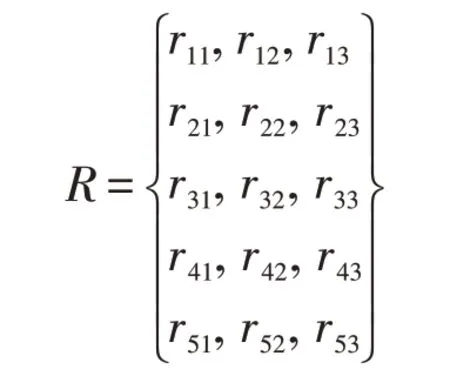
將環境感知機器人在豬舍收集的環境信息經卡爾曼濾波后代入各自隸屬度函數中可得對應隸屬度,通過隸屬度函數計算各環境參數隸屬度。溫度指標隸屬度r1={r11,r12,r13},濕度指標隸屬度r2={r21,r22,r23},氨氣濃度指標隸屬度r3={r31,r32,r33},硫化氫濃度指標隸屬度r4={r41,r42,r43},二氧化碳濃度指標隸屬度r5={r51,r52,r53},因此可建立模糊關系矩陣如下式:
3.2 基于熵值法的權重判定法
權重是指溫濕度、氨氣濃度、硫化氫濃度、二氧化碳濃度對豬舍環境影響程度,由于環境參數對豬舍環境重要程度不同,對各個環境參數將需賦予不同權重系數,不同權重有時得到不同評價結果,因此要選擇適合豬舍環境的權重判定算法是評價系統重要一環。
生豬對環境變化具有一定適應性,但環境某一因素發生突變時易造成生豬應激反應,導致育肥豬生長緩慢,母豬繁殖能力下降,甚至個別死亡。謝秋菊使用改進層次分析法對豬舍環境參數權重賦值,得到環境溫度、濕度、風速、氨氣濃度、二氧化碳濃度和硫化氫濃度權重,但某一環境參數突變時,該權重評價模型難以對豬舍環境作出正確評價[19],本文將使用熵值法確定環境參數各個權重,熵值法與具有主觀因素偏重的一般層次分析法不同,熵值法是一種基于觀察值確定權重的客觀賦權法。熵越小,說明信息更加無序化,在綜合評價中越有價值,即權重越大,例如,當豬舍溫度突變過高時,該算法將溫度因素權重增加,降低其他變化較小因素權重。
以下是算法過程:
①根據以下公式將表內的數據作非負化處理:
②根據以下公式計算非負化處理后第j項環境參數數據權重:

③根據以下公式計算第j項環境參數熵值:

④根據以下公式計算各環境參數的信息熵冗余度:
⑤計算各環境參數權值:
按上述步驟可求得權重矢量A和模糊關系矩陣R,利用加權平均模糊算子M(.,⊙)將權重矢量和模糊關系矩陣合成成模糊綜合評價結果矢量:

4 系統運行測試
4.1 環境感知機器人溫度采集測試
測試過程:①環境感知機器人上電前,用標準水銀溫度計在不同位置測量豬舍溫度后取平均值作為標準溫度。②多個環境感知機器人上電,機器人群短時間內在多個位置溫度取樣,上傳溫度數據到后臺數據庫。③溫度數據經過卡爾曼濾波算法處理后生成融合結果并上傳到后臺數據庫。溫度傳感器的卡爾曼濾波結果見圖10,誤差對比結果見圖11。
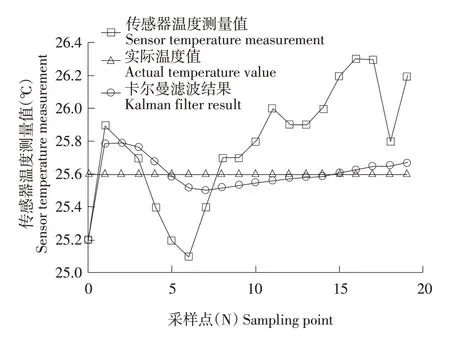
圖10 溫度傳感器卡爾曼濾波結果Fig.10 Kalman filtering results of temperature sensor
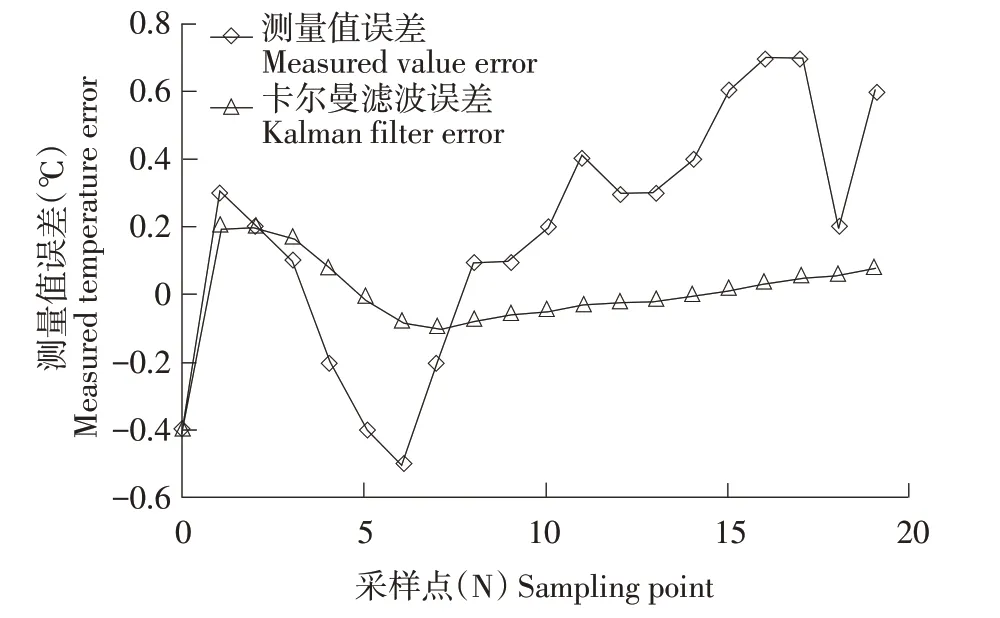
圖11 誤差對比結果Fig.11 Error comparison results
從圖10濾波結果可知,經卡爾曼濾波后平均溫度為25.55℃,而20組溫度測量平均值為25.77℃。以標準水銀溫度計測得溫度25.6℃為標準值衡量卡爾曼濾波算法精確度。在圖11誤差結果對比圖中,卡爾曼濾波算法后誤差為0.19%,測量值誤差為0.66%,通過誤差結果比較可知使用卡爾曼濾波算法后傳感器數據在準確度上明顯提升,表明卡爾曼濾波算法在本次試驗中滿足數據處理要求。
4.2 環境感知機器人環境評價測試
本次環境感知機器人環境評價測試地點選擇在衡陽雙胞胎飼料有限公司(雙胞胎集團湖南分公司)中,測試時間選擇春季的0:00~19:00,豬舍內部如圖12所示。

圖12 豬舍內部照片Fig.12 Interior photos of the pig house
測試時在豬舍中均勻選擇20個采樣點,環境感知機器人在各采樣點對環境參數采集10次,并利用中值濾波函數濾波以減少偶然因素干擾,采集結束后對20組數據作卡爾曼濾波推斷出豬舍當前環境參數,環境參數監測值見表2。
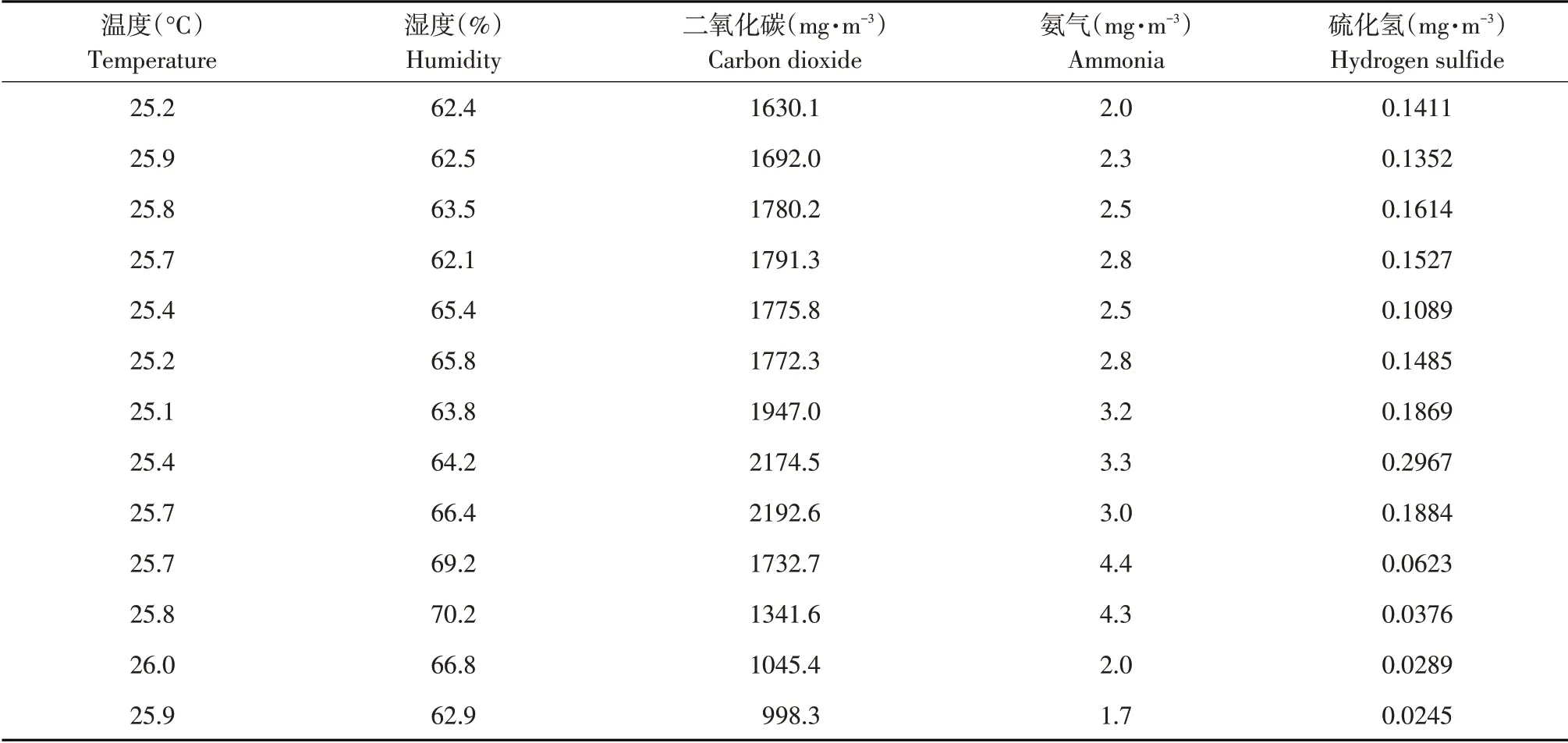
表2 環境參數監測值Table 2 Environmental parameter monitoring value
根據上述步驟,數據經卡爾曼濾波后結果為:{溫度:25.55℃,濕度:66.79%RH,二氧化碳:1 468.5 mg.m-3,氨氣:2.28 mg.m-3,硫化氫:0.0926 mg.m-3};將濾波后溫濕度、氨氣濃度、硫化氫濃度數據、二氧化碳濃度數據代入上述隸屬函數中可繪制出環境參數因素隸屬度圖,如圖13所示。

圖13 環境參數隸屬度Fig.13 Membership of environmental parameter
續表
之后確定各環境因素權重,將數據用熵值法計算出A={0.189,0.191,0.187,0.198,0.234};根據豬舍評價算法建立的因素集U={溫度、濕度、二氧化碳、氨氣、硫化氫}和評語集V={健康、亞健康、不健康};然后根據各環境參數隸屬度函數確定模糊關系矩陣如下:

最后,利用加權平均模糊算子M(.,⊙)將權重向量和模糊關系矩陣合成模糊綜合評價結果矢量:B=A×R={0.851,0.323,0.032},對應評語集V={健康、亞健康、不健康},根據最大隸屬度原則,評語集中“健康”占比最高0.851,其次是“亞健康”占比0.323,因此判定此時豬舍環境為“健康”,豬舍環境評定結果可在遠程操作中心子系統上位機中顯示,如圖14所示。
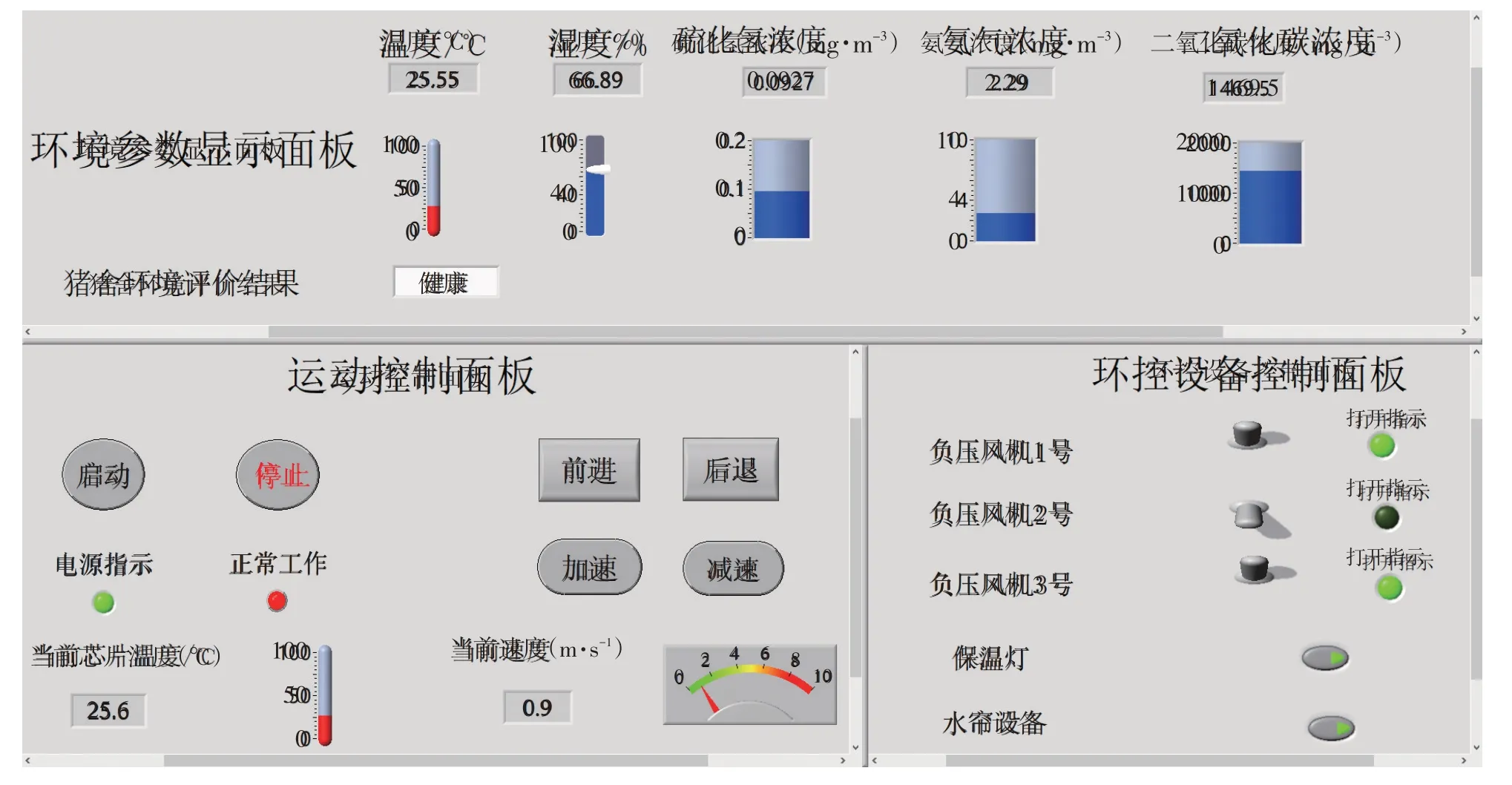
圖14 遠程操作中心子系統上位機Fig.14 Remote operation center subsystem host computer
5 結論
本文針對中小型生豬養殖場實際需求,提出利用基于環境感知機器人的豬舍環境監控系統,以實現豬舍生態環境參數準確監測、生豬生長狀態實時監控。為保證系統檢測豬舍環境參數精準性,采用多傳感器卡爾曼融合算法,并在控制芯片內部程序中實現該算法。溫度數據測試數據表明卡爾曼濾波后誤差僅為0.19%,可靠性大幅度提高,滿足豬舍實際檢測需求。為實現豬舍環境評價,采用基于熵值法的模糊綜合算法評定豬舍環境,通過試驗測試可知,該算法可滿足豬舍環境評價,預警環境突變。
但本文環境控制系統還有待完善,結合生豬飼喂機器人、清掃消毒機器人研究,有望實現豬舍無人化管理[20],降低人力成本,在農牧領域應用前景良好。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
測控技術(2018年12期)2018-11-25 09:37:34
中國生殖健康(2018年6期)2018-11-06 07:09:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
