基于CarSim和MATLAB的電子限滑差速器控制策略研究*
2021-08-24 01:36:18肖峻趙志強劉志柱謝錫春賀征
汽車技術 2021年8期
肖峻 趙志強 劉志柱 謝錫春 賀征
(1.武漢理工大學,武漢 430070;2.東風越野車有限公司,武漢 430056)
主題詞:電子限滑差速器 數學模型 協調控制
1 前言
車輛加速行駛在分離路面等惡劣路況時,低附著路面上驅動輪會發生打滑,并導致整車牽引力下降[1]。針對上述情況,傳統的驅動防滑策略通過改變發動機輸出扭矩和驅動輪制動力矩來改善汽車的牽引性能[2],但是,驅動輪在制動過程中會消耗大量的發動機輸出功率,導致車輛的行駛動力不足[3]。普通差速器具有平均分配驅動力的特點[4],故其無法有效修正車輛轉向過度,并且高速狀態下會出現嚴重失穩現象,極大地降低車輛的行駛穩定性和駕駛安全性[5]。
電子限滑差速器(Electronic Limited Slip Differential,ELSD)是汽車輪間動力分配的關鍵部件。國外已熟練掌握ELSD機械本體設計及核心控制策略的開發技術[6-8],但國內對此研究較少[9],多是對成熟ELSD機械本體進行性能分析,且ELSD控制策略研究也停留在理論仿真階段,其控制效果并未與實車進行對比分析。
本文提出ELSD 相關性能試驗方案,并建立ELSD的數學模型,基于ELSD 驅動力主動分配[6]和增加了車輛轉向不足[10]2 個特點,提出適用于ELSD 的控制策略。最后,結合CarSim 與MATLAB∕Simulink 軟件開展聯合仿真,以驗證該控制策略的正確性。
2 對標樣車測試
本文選取2 種典型整車測試工況的相關數據并進行分析,研究初步發現了影響ELSD工作的車輛行駛狀態參數,但其具體控制策略還處于未知狀態。為了更深入地了解ELSD 的控制規律,本文通過ELSD 的數學模型、控制系統的設計及軟件在環測試展開正向研究。
2.1 測試條件
選擇一款裝配ELSD 的對標車,其前橋配備標準的開放式普通差速器,后橋配備電液主動式電子限滑差速器,并且具有6 種駕駛模式,即自動(AUTO)、運動(SPORT)、雪地、泥地、沙地和四輪驅動低擋位(4L)模式,測試全程采用自動模式。根據不同駕駛員情況和路況設計了多種測試工況,如在高附著路面上根據駕駛員不同的制動程度和油門踩踏深度駕駛車輛等。另外,通過邏輯分析儀采集電磁閥的高、低電平計算出電磁閥的脈沖寬度調制(Pulse Width Modulation,PWM)占空比控制信號,并且利用Value CAN3和Vehicle Spy3采集整車CAN總線數據,測試工具與對標車如圖1所示。
圖1 測試工具與對標車
本文通過分析現有整車測試工況的相關測試數據獲得ELSD初步的控制規律:
a.ELSD控制系統與防抱死制動系統(ABS)、車身電子穩定系統(ESP)和牽引力控制系統(TCS)具有兼容性,當ABS 和ESP 工作時,ELSD 控制系統關閉,TCS 與ELSD控制系統可以協調工作。
b.當前車速決定了ELSD控制系統能否被觸發。
c.ELSD 控制方式分為牽引力控制和穩定性控制。其中,牽引力控制方式分為2 種:第一種是當油門踏板位置突然發生變化時,ELSD 控制系統被觸發,使ELSD 的離合器片進入鎖止準備狀態,預防車輛發生打滑;第二種是當車輪發生打滑時,ELSD 控制系統被觸發,使ELSD的離合器片逐漸鎖止,起到限滑作用,提高整車牽引力。在穩定性控制中,車輛起動后,當縱向加速度超過0.612g時,ELSD控制系統被觸發,使ELSD的離合器片逐漸鎖止,提高車輛的穩定性。
2.2 典型工況分析
本文針對加速工況下的對標車進行ELSD 控制規律的研究,選取2種測試工況進行分析:
a.駕駛員以不同的油門踏板深度在單一路面上起步行駛,測試結果如圖2所示。

圖2 起步行駛測試結果對比
b.駕駛員在單一路面上起步行駛,一段距離后進入分離路面(左側是玄武巖路,右側是公路),測試結果如圖3所示。
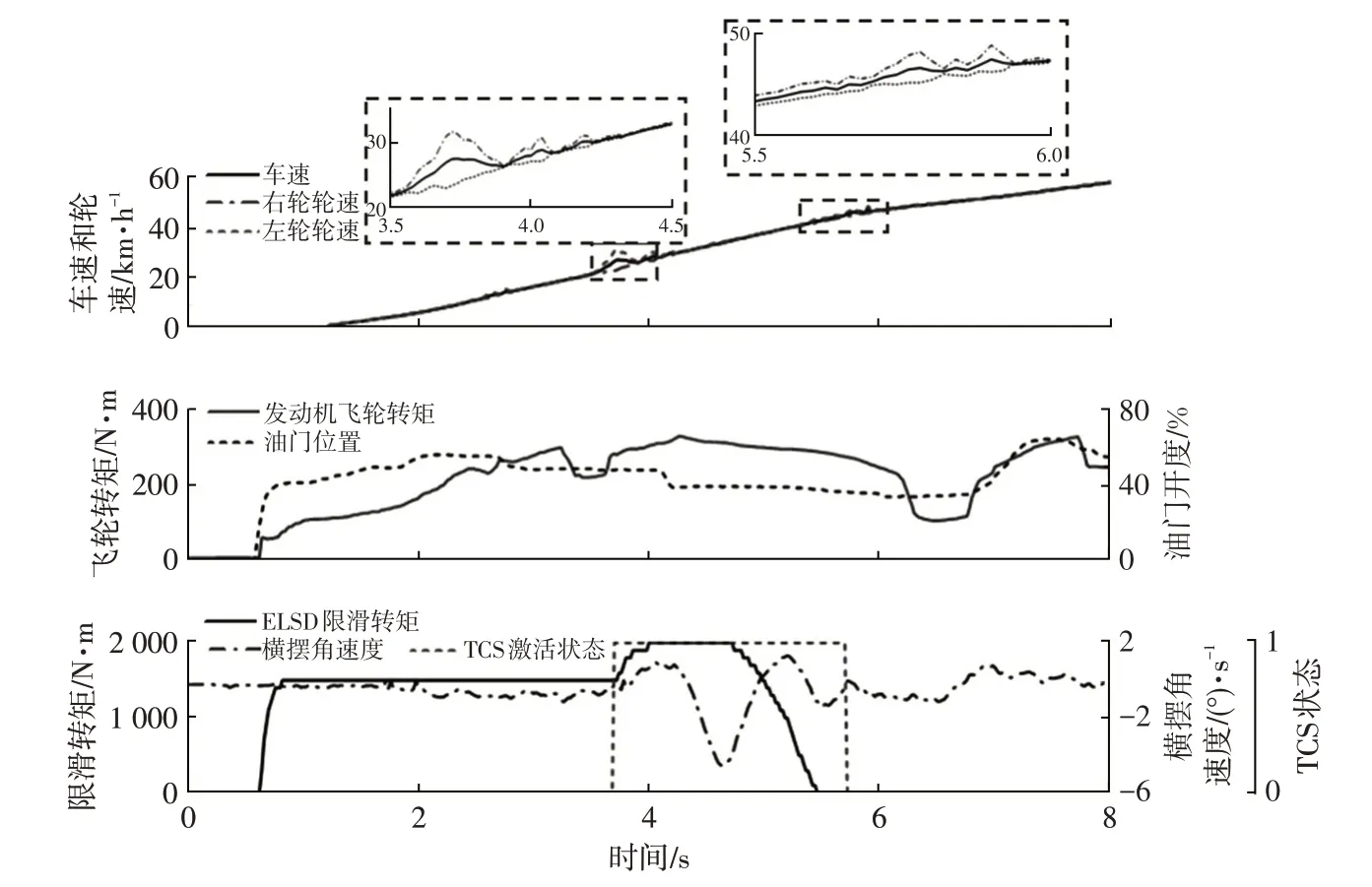
圖3 分離路面測試結果對比
由圖2a 可知,駕駛員從第1.21 s 開始踩油門踏板,第1.51 s時油門踏板開度為13.7%,油門踏板開度變化率為45.67%∕s,在此過程中,ELSD 始終未工作;由圖2b 可知,駕駛員從第0.39 s開始踩油門踏板,第0.41 s時油門踏板開度達到22.4%,油門踏板開度變化率為1 120%∕s,此時ELSD 開始工作,到第0.61 s 時,其限滑轉矩為1 400 N·m,并維持長達3.17 s后開始降低,直到第6.43 s時停止工作,限滑轉矩降為0。通過分析大量類似數據得到如下控制規律:當油門踏板開度變化率超過某數值時,ELSD開始工作,否則ELSD不工作。
由圖3 可知,駕駛員第0.58 s 時開始在單一路面上駕駛車輛起步,其油門踏板開度變化率超過某數值時ELSD 開始工作,限滑轉矩為1 500 N·m,行駛到第3.5 s時,對標車幾乎以恒定油門踏板開度行駛到分離路面,此時,后橋左驅動輪開始打滑,左、右輪瞬間產生輪速差,但是TCS 并沒有立即激活,此時發動機的輸出扭矩為230 N·m,維持0.3 s后,TCS開始被激活,此時輪速差為9 km∕h,ELSD限滑轉矩繼續增大,到第4.1 s時達到最大值2 000 N·m,逐漸消除輪速差,發動機輸出扭矩同時也增大到333 N·m。從整個測試過程中可以發現,當ELSD開始工作時,橫擺角速度也逐步增大,并在第4.6 s時達到峰值4.5(°)∕s,車輛出現了小幅度的橫擺現象,并且車輛行駛到第5.7 s 時,左、右輪又開始出現輪速差,但是ELSD并沒有工作,測得此時車速為42 km∕h。通過分析大量類似的數據得到如下控制規律:
a.當行駛車速超過某數值時,ELSD不工作。
b.當左、右驅動輪存在輪速差,并且該狀態持續一段時間后,ELSD開始工作。
c.基于輪速差的控制可以與基于油門踏板開度變化率的控制進行疊加。
3 模型建立
3.1 ELSD數學模型
ELSD 液壓系統結構的復雜性和系統響應的滯后性,導致了液壓系統響應結果的非線性,使得難以用傳統數學理論方法得到ELSD數學模型,只能通過試驗數據具體分析[11]。丁華等人將ELSD的液壓系統壓力P簡化為包括滯后環節的一階慣性系統,相應的時域方程為[12]:
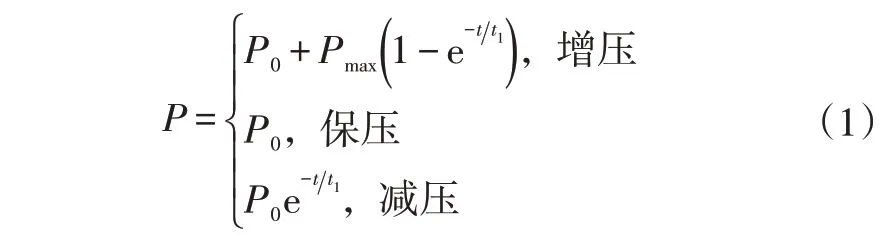
式中,P0為液壓系統初始輸出壓力;Pmax為液壓系統最大壓力;t為時間變量;t1為等效一階慣性環節的時間常數。
ELSD產生的限滑轉矩Tc為[12]:

式中,μ為離合器摩擦片摩擦因數;KA為有效面積系數;Z為摩擦面的數量;r1、r2分別為摩擦面內、外半徑。
為了得到電磁閥PWM 占空比控制信號與ELSD 限滑轉矩的關系,本文開展臺架試驗。試驗臺架如圖4所示,李柱[13]等人對該ELSD臺架的設計進行了詳細描述。
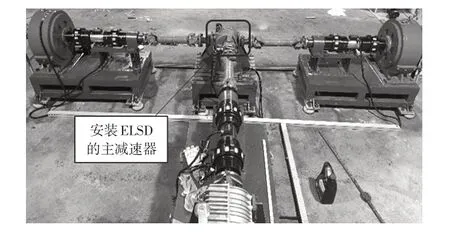
圖4 ELSD試驗臺架
試驗方案:對臺架一端的磁粉制動器施加負載直到輸出半軸處于抱死狀態,另一端輸出半軸模擬車輪打滑的情況,然后ELSD 控制器向電磁閥發出階躍PWM 占空比控制信號,當左、右輸出半軸的轉速幾乎相等時,根據傳感器及上位機組態軟件采集左、右半軸的轉矩計算限滑轉矩,并記錄當前PWM 占空比。忽略臺架的內摩擦,選取其中一組數據,控制器發送占空比為30%的PWM信號,得到的限滑轉矩如圖5所示。

圖5 階躍輸入系統響應
對采集到的數據進行辨識,得到該系統的傳遞函數為:

式中,Tout為限滑轉矩;Pout為控制信號PWM 占空比;K=48 為比例增益;Tp=0.03 s 為時間常數;τ=0.000 78 s為滯后時間。
3.2 ELSD扭矩分配模型
ELSD 扭矩傳遞原理如圖6 所示。其中,Tin為差速器殼體輸入扭矩,Tc為離合器摩擦片扭矩,Tl、Tr分別為左、右半軸輸出扭矩,Td為行星齒輪傳遞的扭矩,wl、wr分別為左、右輸出半軸轉速;win為差速器殼體輸入轉速;wd為行星齒輪軸轉速。
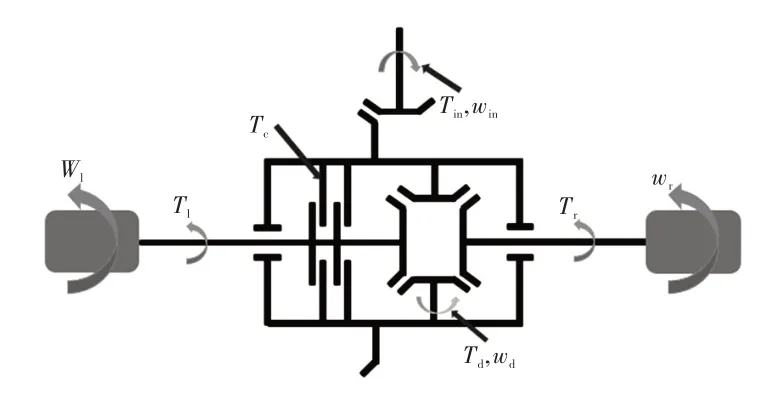
圖6 扭矩傳遞原理
假設扭矩傳遞效率為100%,半軸齒輪與行星齒輪傳動比為1,忽略ELSD的轉動慣量,Tin、Tl與Tr的關系可以表示為:
式中,λc為修正系數;kc為扭矩分配系數,計算公式為:
3.3 參考模型
汽車線性2 自由度單軌模型能夠較好地反映車輛操縱穩定性的基本特性,所以本文采用該模型作為參考模型,獲得期望橫擺角速度。其微分方程為:
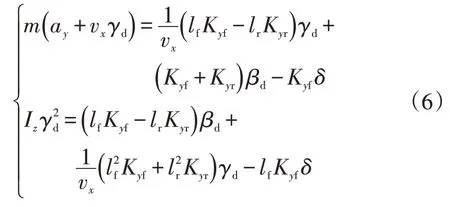
式中,m為汽車質量;ay為側向加速度;vx為縱向速度;γd為期望橫擺角速度;lf、lr分別為車身質心到前、后軸的距離;Kyf、Kyr分別為前、后輪輪胎側偏剛度;βd為期望質心側偏角;δ為前輪轉向角度;Iz為汽車繞Z軸的轉動慣量。考慮道路摩擦因數限制[14],其橫擺角速度應滿足:

式中,μmax為路面最大摩擦因數。則期望橫擺角速度為:

4 ELSD控制策略
4.1 控制策略總體模型框架
圖7 所示為ELSD 控制策略總體框架。圖7 中,athro為當前油門踏板位置,vx為當前車速,δ為轉向盤轉角,γ、Δγ分別為當前橫擺角速度及其誤差,ay為側向加速度,Pffc、Petcs和Psc分別為FFC 模塊、ETCS 模塊和SC 模塊輸出的PWM 控制信號值,Ft和Fs分別為牽引力控制標志位和穩定性控制標志位,取值為1時表示該控制系統觸發,為0時表示該控制系統關閉。
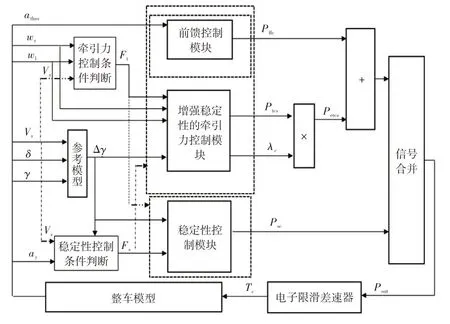
圖7 ELSD控制策略總體框架
該控制策略主要包括3 個部分:前饋控制(Feedforward Control,FFC)模塊、增強穩定性的牽引力控制(Enhanced Traction Control for Stability,ETCS)模塊和穩定性控制(Stability Control,SC)模塊。通過對標車整車測試數據進行分析,本文提出的ELSD控制策略根據當前行駛車速來判斷觸發牽引力控制還是穩定性控制。當車輛低速行駛中驅動輪發生打滑時,ELSD 控制系統采用FFC和ETCS來保證車輛獲得最佳牽引性能的同時提高車身穩定性;車輛高速行駛時,牽引力控制關閉,穩定性控制開啟,并根據橫擺角速度誤差來判斷車身是否失穩,當車輛加速轉向導致轉向過度時,采用SC提高車輛的穩定性。控制系統的輸出表示為:

4.2 基于油門開度變化率的前饋控制
為使車輛起步性能達到最佳狀態,本文提出基于油門踏板開度變化率的前饋控制策略。在車輛起步行駛過程中,若油門開度變化率超過設定閾值,前饋控制器向電磁閥發出定值PWM 控制信號使ELSD 離合器摩擦片鎖止,此動作在車輛打滑前完成,從而保證車輛起步加速時在最短的時間內獲得最佳牽引力,防止因驅動輪打滑出現車身不穩定的現象。通過對標車測試數據分析,前饋控制在短時間內只觸發1次。
FFC控制器的輸出表示為:
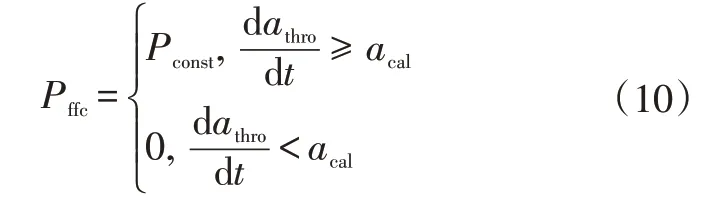
式中,Pconst為可標定的PWM控制信號值;acal為可標定的油門踏板開度變化率閾值。
4.3 增強穩定性的牽引力控制
當車輛加速行駛在分離路面時,驅動輪會因左、右側路面附著系數的不同發生嚴重打滑。此時,ELSD 接收到PWM 控制信號后,調控離合器活塞對摩擦片的壓緊力,從而產生限滑轉矩,使左、右輪的驅動力不同,由此會對整車產生橫擺力矩Mc[15-16],假設左、右輪胎半徑相等,則Mc可表示為:

其中:

式中,Fxl、Fxr分別為左、右輪驅動力;B為輪距;R為輪胎半徑。
根據式(4)、式(11)、式(12)得到橫擺力矩Mc與離合器摩擦片扭矩Tc的關系:

從式(13)可以看出,ELSD 的鎖止程度對車輛橫向、縱向動力學都有重要影響。當車輛行駛在分離路面時,完全鎖止的ELSD 雖然可以使高附著路面上的驅動輪驅動力增大,但是橫擺力矩也會增大,造成車輛穩定性的降低。針對該情況,本文提出一種基于PID 控制和模糊控制的協調控制策略,基本流程如圖8所示。
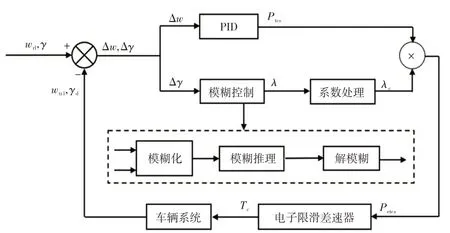
圖8 協調控制策略基本流程
車輛行駛過程中,PID控制器會根據輪速差對Tc進行調節,以滿足車輛獲得最大牽引力的需求,PID 控制器的輸出表示為:

其中:

式中,wrl為實際左、右輪速差;wtrl為目標左、右輪速差;Kp、Ki和Kd分別為比例、積分和微分系數。
如果在PID 控制器單獨作用下出現了車身失穩現象,則啟動模糊控制器。本文設計的模糊控制器以橫擺角速度與名義值的誤差Δγ及其變化率為輸入,修正系數λ為輸出。
根據式(8)得到橫擺角速度誤差為:

式中,γd為車輛期望橫擺角速度。
設Δγ的基本論域為[-0.5,0.5]rad∕s,Δγ變化率的基本論域為[-0.4,0.4] rad∕s2,輸出量的基本論域為[-1,1],輸入、輸出量的模糊集論域均為[-1.5,1.5],則Δγ和Δγ變化率的量化因子分別為Ke=3,Kec=3.75,輸出控制量的量化因子為Ku=0.667。
將輸入量Δγ及其變化率的模糊集分為5 個等級NB、NS、ZE、PS、PB,輸出量的模糊集分為7 個等級NB、NM、NS、ZE、PS、PM、PB,其隸屬度函數如圖9所示。
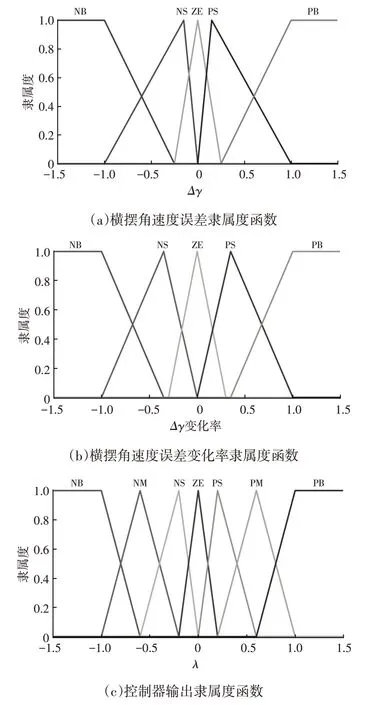
圖9 隸屬度函數
依據文獻[17]得到模糊控制規則如表1所示,其中,e、ec分別為橫擺角速度誤差Δγ及其變化率。綜上,ETCS控制器的輸出表示為:
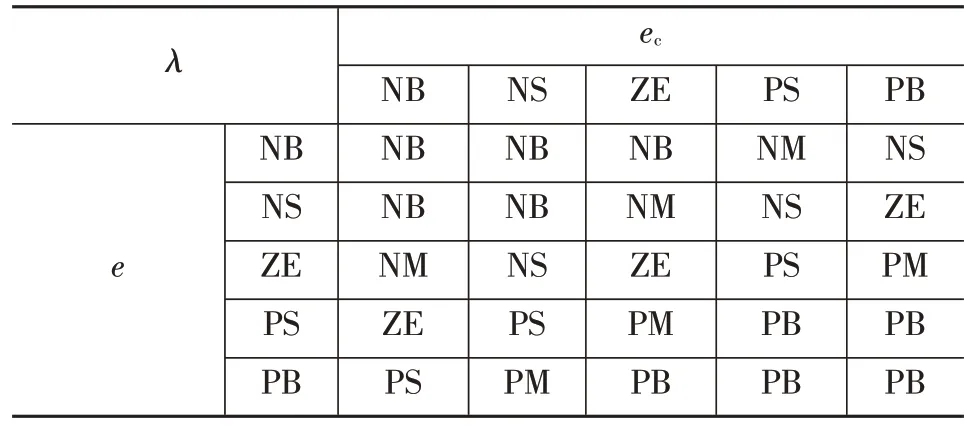
表1 模糊控制規則

其中,修正系數λc為:

式中,γcal為可標定的橫擺角速度誤差閾值。
4.4 基于橫擺角速度誤差的穩定性控制
車輛在轉彎時,鎖止ELSD 會使扭矩從外側車輪傳遞到內側車輪,從而在轉彎的相反方向產生橫擺力矩,加大了車輛轉向不足的趨勢。本文利用該特點提出一種基于橫擺角速度誤差的PID 控制策略,當SC 控制器檢測到車輛轉向過度時,控制系統發出指令逐步鎖止ELSD,從而減緩車輛轉向過度,降低峰值橫擺角速度,提高操縱穩定性。SC控制器的輸出表示為:
5 仿真驗證及結果分析
5.1 CarSim/Simulink聯合仿真模型
本文選用CarSim 軟件建立整車動力學模型,其主要整車參數如表2 所示,利用MATLAB∕Simulink 建立ELSD 數學模型及控制系統模型,最后,運用CarSim∕Simulink 建立聯合仿真模型驗證所提出控制策略的正確性,聯合仿真架構如圖10所示。
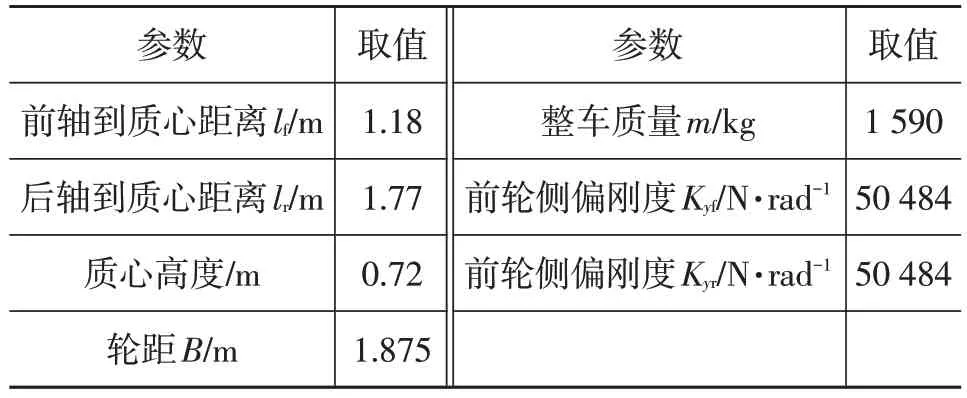
表2 CarSim整車主要參數
圖10 CarSim∕Simulink聯合仿真架構
5.2 FFC控制策略仿真驗證
車輛在實際起步過程中,兩輪的附著系數存在差異,為體現FFC 算法的控制效果,本文將仿真路況設置為兩側附著系數相差不大的分離路面,左、右側路面附著系數分別為0.4 和0.6,車輛直線行駛,油門踏板開度在第1 s 時達到最大,如圖11 所示。對比FFC 控制效果與對標車的控制效果,仿真時長設為3 s,仿真結果如圖12所示。
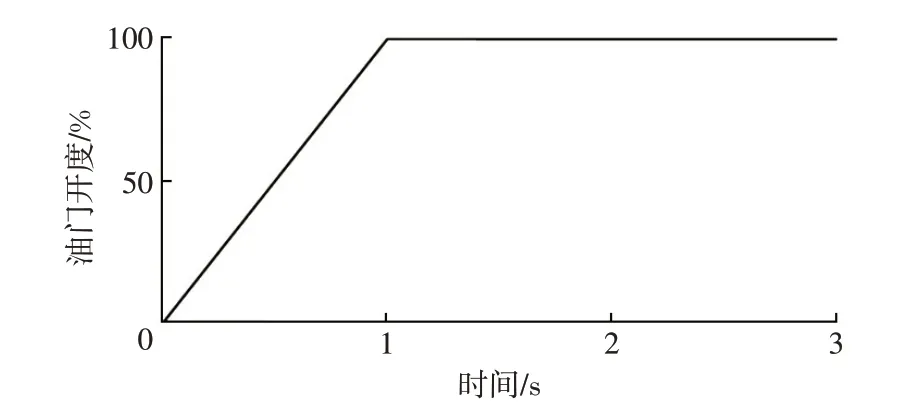
圖11 油門開度
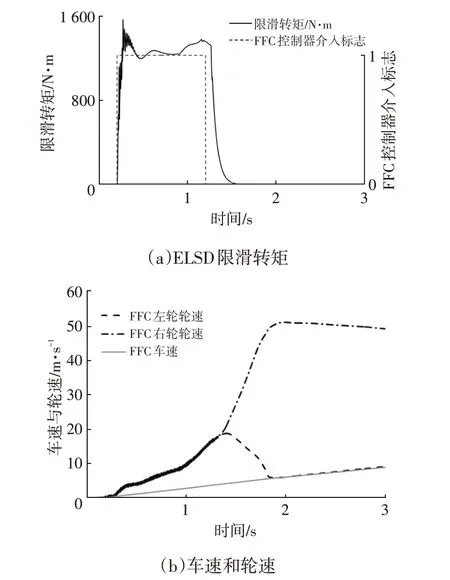
圖12 FFC控制仿真結果
由圖12可知:車輛起步過程中,FFC控制器在第0.2 s時檢測到油門踏板開度變化率超過了設定閾值(假設FFC 控制在1 s 內只觸發1 次),從而觸發FFC 控制,使ELSD開始工作,產生的限滑轉矩約為1 200 N·m,使左、右半軸剛性連接,左、右驅動輪輪速幾乎相等;在第1.3 s時FFC控制關閉,此時,ELSD和普通差速器一樣平均分配驅動扭矩,右輪開始打滑。將仿真結果與圖2b對比可知,本文設計的FFC控制器與對標車的控制效果及控制趨勢一致,保證了車輛起步時獲得最佳牽引性能。
5.3 ETCS控制策略仿真驗證
路況設置為兩側附著系數相差較大的分離路面,左、右側路面附著系數分別為0.9 和0.2,車輛行駛方式與5.2節中相同。仿真時長設為8 s,圖13所示為PID控制的仿真結果。
由圖13可知,PID控制器在整個仿真過程中全程介入,使ELSD幾乎完全鎖止,將發動機輸出扭矩更多地傳遞到位于高附著路面的左側車輪上,左、右輪速幾乎相等,保證車輛具有較好的牽引性能,但仿真過程中車輛一直存在大幅橫擺現象,穩定性降低,約在第1.9~2.3 s,后方左、右驅動輪均偏離到高附著路面上,在此過程中,橫擺角速度峰值約為0.2 rad∕s,質心側偏角峰值約為0.29 rad。綜上可知,車輛全油門開度加速行駛在分離路面時,僅通過PID 控制器進行控制雖提高了牽引性能,但極大降低了車輛穩定性。將仿真結果與圖3對比發現,PID控制器與對標車的控制效果及控制趨勢一致。
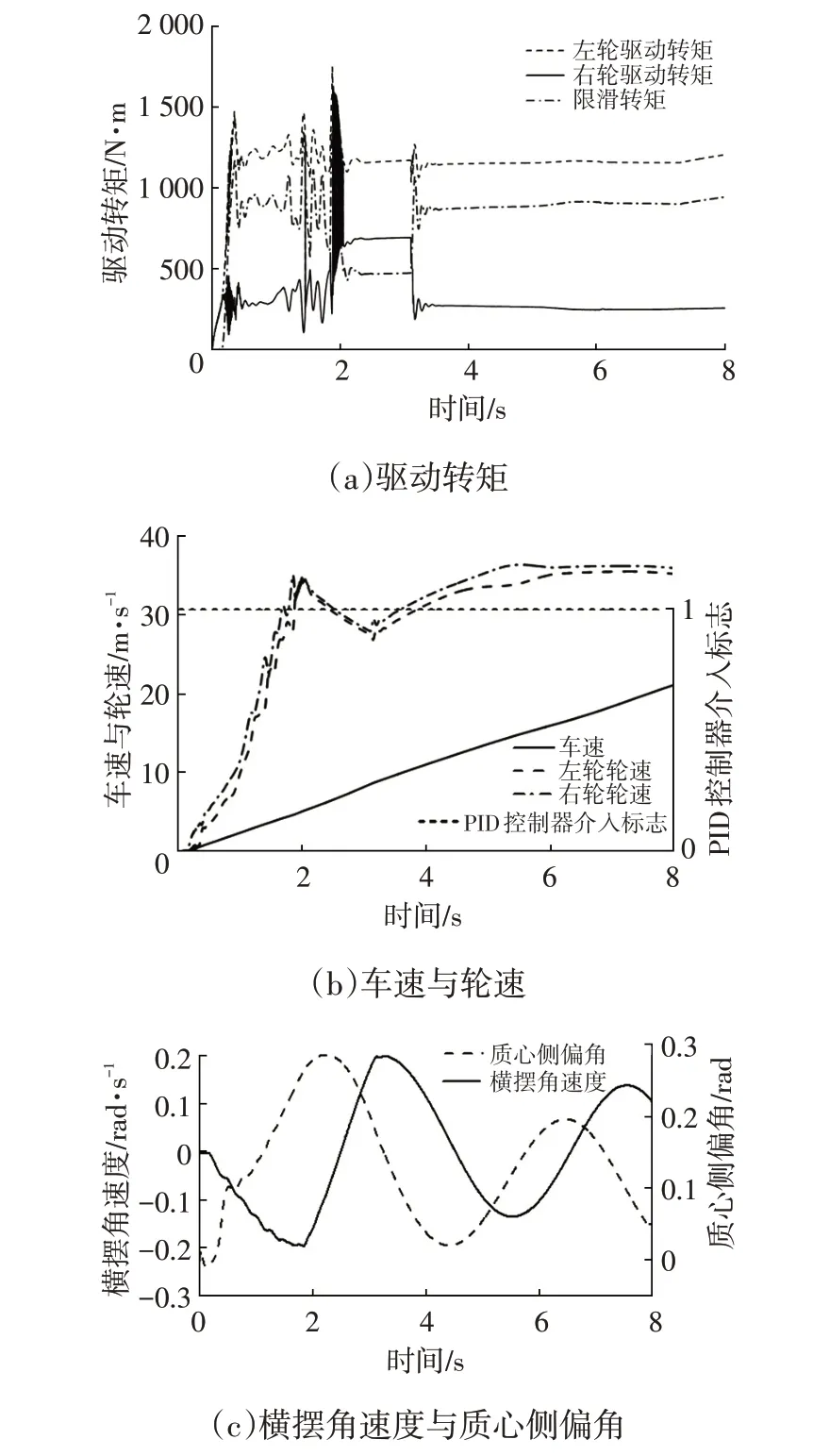
圖13 PID控制仿真結果
為解決上述問題,利用模糊控制器與PID 控制器對車輛進行協調控制,仿真條件不變,結果如圖14所示。
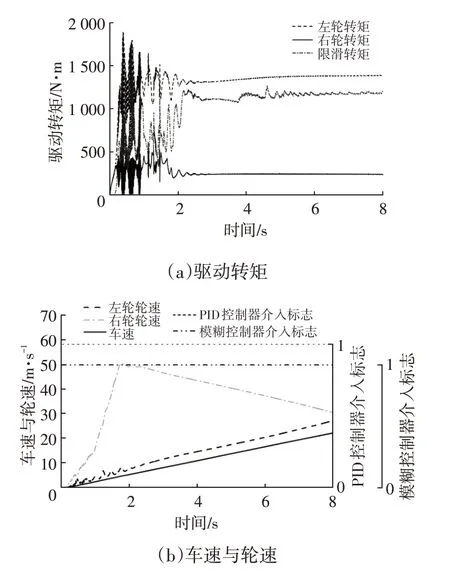
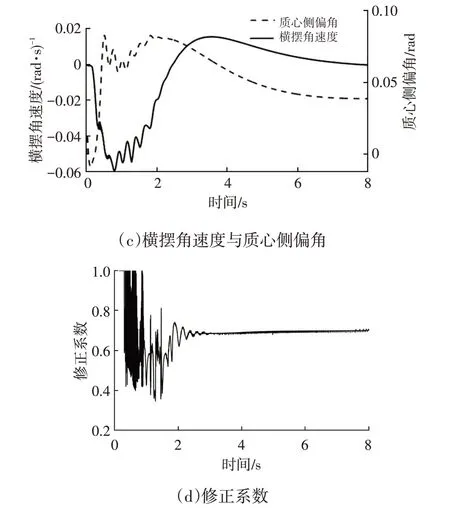
圖14 ETCS控制仿真結果
由圖14 可知,協調控制在車身穩定性上起到了很好的調控作用。仿真過程中,相對于只有PID 控制器,采用加入模糊控制的控制器的車輛并未出現明顯的橫擺現象,其橫擺角速度峰值約為0.06 rad∕s,質心側偏角峰值約為0.08 rad,分別降低了0.14 rad∕s 和0.21 rad,極大增強了車輛穩定性。此外,ETCS 控制器控制的車輛在仿真結束時車速為22.35 m∕s,提高了4.4%,說明牽引性能也得到了一定的提升。以上結果表明,當車輛加速行駛在分離路面時,ETCS 控制器不僅有效保證了車輛的牽引性能,還提高了車輛的穩定性能。
5.4 SC控制策略仿真驗證
路況設置為路面附著系數為0.6的單一路面。油門踏板開度在第1 s時達到最大,然后保持直線行駛,在第6 s 時,轉向盤以頻率0.5 Hz、幅值3.14 rad 呈正弦變化,如圖15所示。
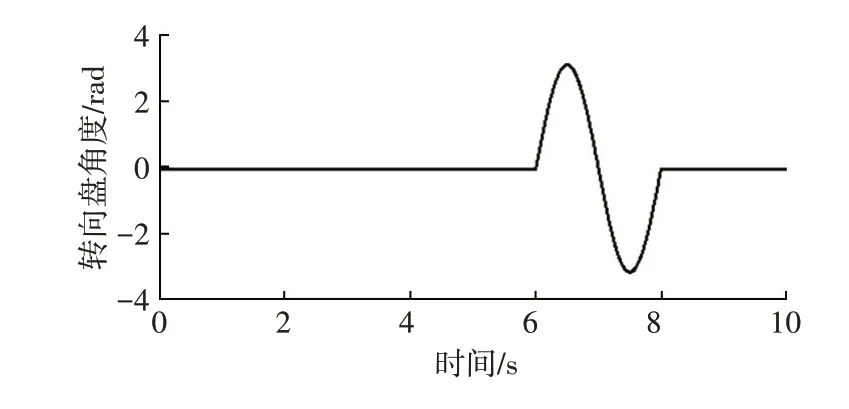
圖15 轉向盤角度變化
在現有的對標車彎道測試結果中并未發現ELSD工作的數據,因此在軟件仿真中選擇有、無SC控制器的車輛進行對比,仿真結果如圖16所示。
由圖16 可知,車輛在加速轉向過程中均出現了轉向過度的現象,與此同時,SC 控制器立刻介入,修正車輛轉向過度。相比于無控制的車輛:車輛第1次轉彎時,其橫擺角速度峰值從0.31 rad∕s 降低到0.27 rad∕s,質心側偏角峰值從0.1 rad 降低到0.06 rad;在車輛第2 次轉彎時,其橫擺角速度峰值從0.6 rad∕s降低到0.44 rad∕s,質心側偏角峰值從0.26 rad 降低到0.1 rad,并在第8.9 s時進入穩定狀態。仿真結束時,相比于無控制的車輛,車速從31.4 m∕s 增大到33.6 m∕s,提高了7%。該仿真結果驗證了SC 控制器不僅有效改善了車輛轉向過度的現象,提高了車身穩定性,車輛的牽引性能也得到了一定的提升。
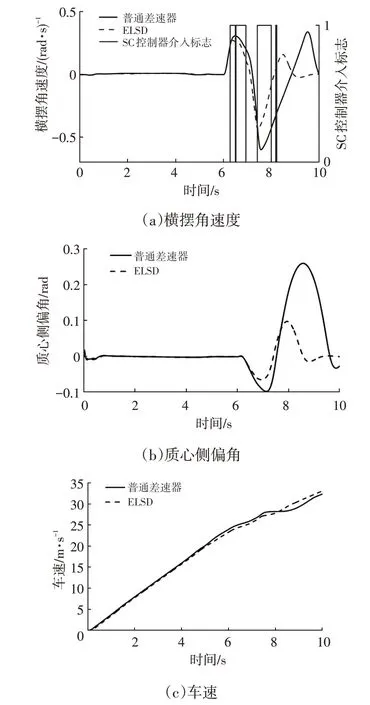
圖16 SC控制仿真結果
6 結束語
本文通過分析對標車的相關測試數據,初步研究了電子限滑差速器控制系統的控制規律,得出對標車從單一路面進入分離路面時,電子限滑差速器工作時會使車輛出現短暫的橫擺現象,通過模糊控制器可以有效地改善橫擺現象的結論。通過臺架性能試驗得到了電子限滑差速器的動力學模型,應用于電子限滑差速器控制策略的研究,并以對標車的控制規律為目標,提出了一種適用于整車的電子限滑差速器的控制策略。
最后,構建基于CarSim∕Simulink的聯合仿真平臺,對控制系統進行了仿真驗證,并通過與對標車控制效果的對比分析,得出本文提出的電子限滑差速器控制策略在分離路面加速工況和加速轉向工況下,不僅能夠保證車輛的牽引性能,而且提高了穩定性能。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
能源工程(2020年6期)2021-01-26 00:55:22
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
