基于步態(tài)規(guī)劃的四足機(jī)器人運(yùn)動(dòng)學(xué)分析和仿真*
2021-08-02 08:03:34陳景聰
組合機(jī)床與自動(dòng)化加工技術(shù) 2021年7期
郭 建,趙 易,陳景聰
(廣州城市理工學(xué)院機(jī)械工程學(xué)院,廣州 510800)
0 引言
仿生機(jī)器人中比較典型的有哺乳動(dòng)物四足機(jī)器人和昆蟲類的六足、八足機(jī)器人,四足動(dòng)物因其獨(dú)特的特點(diǎn),一直是研究的熱門,國(guó)內(nèi)外針對(duì)四足機(jī)器人的研究都取得了一系列成果。文獻(xiàn)[1]研究設(shè)計(jì)了球腿復(fù)合機(jī)器人,優(yōu)化了足端軌跡。文獻(xiàn)[2]研究了負(fù)載四足機(jī)器人的對(duì)角步態(tài)行走的穩(wěn)定性,并利用虛擬樣機(jī)技術(shù)進(jìn)行了仿真。文獻(xiàn)[3]研究了四足機(jī)器人在粗糙地面的對(duì)角小跑運(yùn)動(dòng),設(shè)計(jì)了基于CPG的控制方法。上海交通大學(xué)研發(fā)了 JTU-WM—III,對(duì)傳統(tǒng)機(jī)器人足端擺線軌跡進(jìn)行了修改[4-5]。山東大學(xué)基于液壓驅(qū)動(dòng)研發(fā)了四足機(jī)器人 SCalf-1,建立了關(guān)節(jié)能耗模型,基于傅里葉級(jí)數(shù)展開式優(yōu)化了足端軌跡[6-8]。
麻省理工學(xué)院的Raibert 等研發(fā)一種基于氣缸驅(qū)動(dòng)的四足機(jī)器人,具有觸地緩沖和跳躍動(dòng)作,能夠完成對(duì)角小跑和跳躍步態(tài)[9]。美國(guó)通用電器研發(fā)的四足步行機(jī)器人 Walking Truck[10]。日本的木村浩等研發(fā)了四足機(jī)器人 Tekken[11-13],運(yùn)動(dòng)速度快,機(jī)構(gòu)設(shè)計(jì)復(fù)雜,能耗低。美國(guó)波士頓動(dòng)力公司研發(fā) 的“big dog”機(jī)器人對(duì)環(huán)境情況具有更好的感知和適應(yīng)能力,在受到側(cè)面沖擊時(shí),能通過調(diào)整步態(tài)恢復(fù)平衡狀態(tài)[14]。
為了研究四足機(jī)器人的運(yùn)動(dòng)學(xué)和腿部結(jié)構(gòu),設(shè)計(jì)了一個(gè)四足串聯(lián)機(jī)器人,每個(gè)單腿3個(gè)自由度,整機(jī)共12個(gè)自由度。首先對(duì)四足機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)建模和分析,推導(dǎo)了正解和逆解的數(shù)學(xué)公式,并用MATLAB仿真了四足機(jī)器人的單腿的運(yùn)動(dòng)學(xué)正解和逆解,并將公式計(jì)算結(jié)果和仿真結(jié)果進(jìn)行對(duì)比,分析機(jī)器人對(duì)角步態(tài)和單腿運(yùn)動(dòng),計(jì)算了機(jī)器各個(gè)關(guān)節(jié)轉(zhuǎn)角的函數(shù)表達(dá)式,計(jì)算四條腿的各個(gè)關(guān)節(jié)的驅(qū)動(dòng)函數(shù),最后通過ADAMS仿真,分析仿真結(jié)果,為四足機(jī)器人物理樣機(jī)的制作提供數(shù)據(jù)支撐,有助于縮短研發(fā)周期,提升研發(fā)效率。
1 整機(jī)結(jié)構(gòu)
四足機(jī)器人的整機(jī)結(jié)構(gòu)模型和單腿模型如圖1和圖2所示,四組機(jī)器人的外觀尺寸長(zhǎng)×寬×高為:810 mm×500 mm×700 mm,總體機(jī)身重量6.5 kg。四足機(jī)器人的整機(jī)結(jié)構(gòu)模型是由機(jī)身結(jié)構(gòu)和腿部結(jié)構(gòu)兩部分組成的,機(jī)身結(jié)構(gòu)模型采用的材料是鋁合金。四組機(jī)器人的腿部結(jié)構(gòu)主要由腰關(guān)節(jié)、髖關(guān)節(jié)、膝關(guān)節(jié)和足部組成。該四足機(jī)器人左前腿、右前腿、左后腿、右后腿結(jié)構(gòu)完全一樣,通過控制關(guān)節(jié)的轉(zhuǎn)動(dòng)實(shí)現(xiàn)機(jī)器人的運(yùn)動(dòng)。
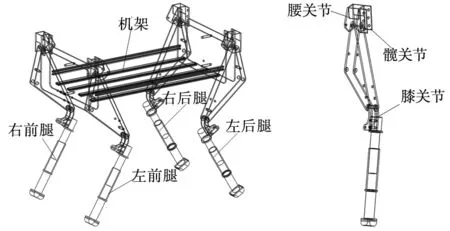
圖1 整體結(jié)構(gòu) 圖2 單腿結(jié)構(gòu)
2 運(yùn)動(dòng)學(xué)建模和計(jì)算


圖3 四足機(jī)器人左前腿部坐標(biāo)系

表1 左前腿D-H參數(shù)表
根據(jù)表1中的參數(shù),可以得到如下變化矩陣:
(1)
(2)
(3)
(4)
sij=sinθicosθj+cosθisinθj,cij=cosθicosθj-sinθisinθj
(5)

足部端點(diǎn)在基坐標(biāo)中數(shù)值0p=[131.4724 0 689.4792]T。

(6)
(7)
pzs2+(pys1+pxc1-a1)L2=L2+L3c3
(8)
pzc2-(pys1+pxc1-L1)s2=L3s3
(9)
pxs1-pyc1=0
(10)
由式(10)得:
(11)
由式(8)的平方加式(9)的平方得:
(12)
(13)
由式(13)得:
(14)
求得角度:
(15)
2.1 正解的驗(yàn)證
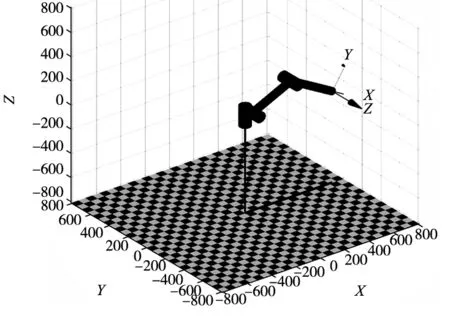
圖4 機(jī)器人的單腿簡(jiǎn)化模型

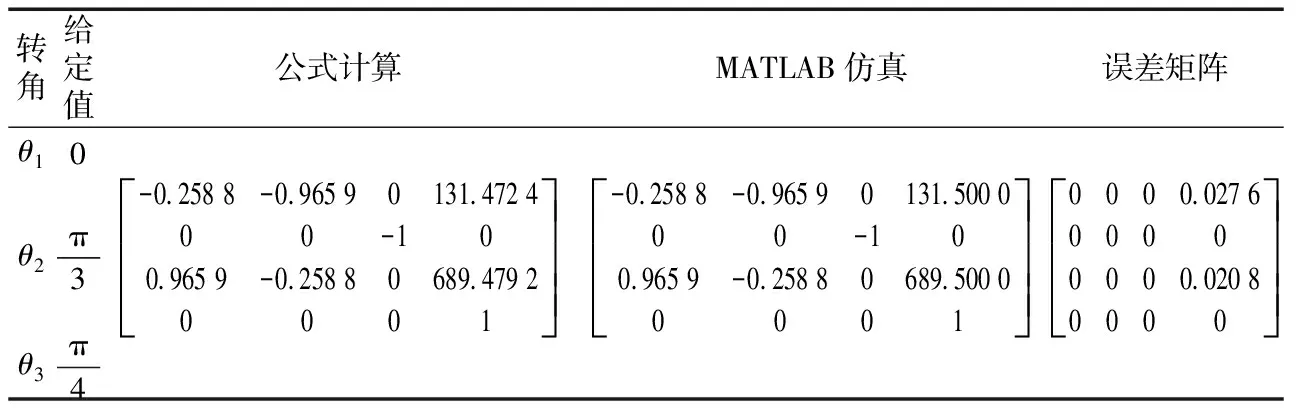
表2 正解的驗(yàn)證1
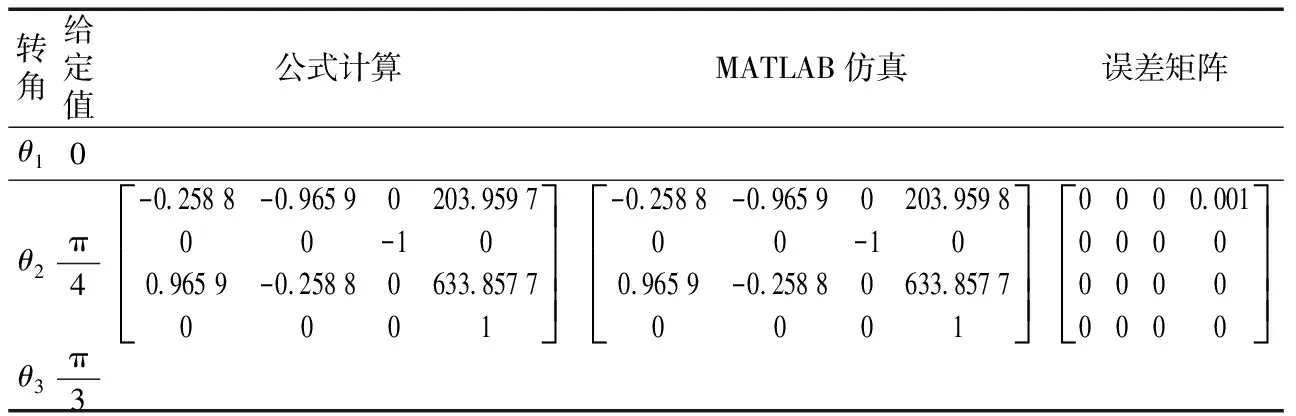
表3 正解的驗(yàn)證2

表4 正解的驗(yàn)證3
通過對(duì)表2~表4對(duì)比發(fā)現(xiàn),理論推導(dǎo)的正解結(jié)果和MATLAB仿真的結(jié)果的誤差最大誤差是0.02%,誤差主要來源于無限不循環(huán)小數(shù),這個(gè)結(jié)果表明理論和仿真結(jié)果基本一致。
2.2 逆解的驗(yàn)證

表5 逆解驗(yàn)證1
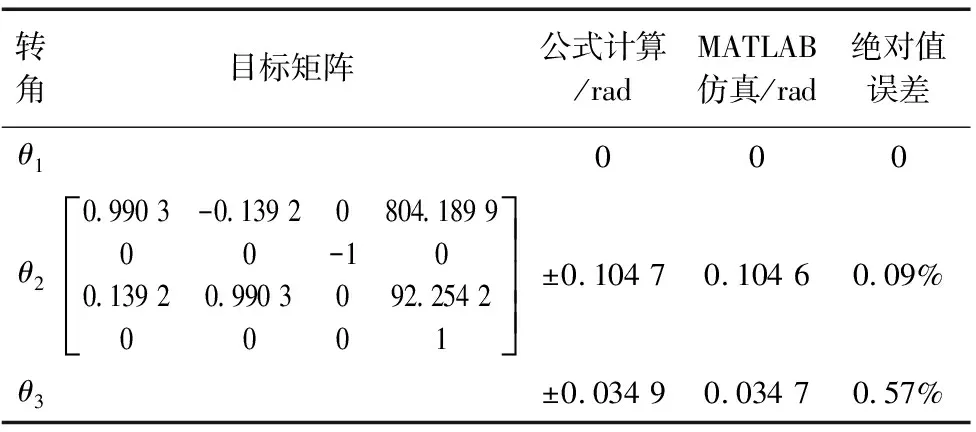
表6 逆解驗(yàn)證2

表7 逆解驗(yàn)證3
從以上3個(gè)表我們可以發(fā)現(xiàn),對(duì)于給定的機(jī)器人的姿態(tài)和位置矩陣,通過數(shù)學(xué)公式計(jì)算的角度值存在正負(fù)兩組值,其絕對(duì)值和MATLAB的仿真結(jié)果基本一致,這從側(cè)面反映出機(jī)器人運(yùn)動(dòng)學(xué)逆解的結(jié)果不是唯一的,從公式的計(jì)算結(jié)果分析,從節(jié)省時(shí)間和機(jī)器人單腿的姿態(tài)分析,取正值作為其最優(yōu)解。運(yùn)動(dòng)學(xué)正解和逆解的正確性可以為后期軌跡規(guī)劃提供關(guān)鍵點(diǎn)。
3 關(guān)節(jié)轉(zhuǎn)角計(jì)算
仿生四足機(jī)器人行走步態(tài)采用對(duì)角步態(tài)。四足機(jī)器人的左前腿、右前腿、左后腿、右后腿分別用LF、RF、RB、LB表示。在機(jī)器人行走過程中,定義對(duì)角線上的兩條腿是一組對(duì)角腿,LF和RB為A組對(duì)角腿,LB和RF為B組對(duì)角腿 。這兩組對(duì)角腿的關(guān)節(jié)擺動(dòng)角度具有固定的相位關(guān)系,為了研究方便,把它們分為支撐相和擺動(dòng)相,四足機(jī)器人對(duì)角步態(tài)運(yùn)動(dòng)機(jī)理如圖5所示,黑色方塊則代表擺動(dòng)相腿部的抬腿,白色方塊代表支撐相腿部的著地。
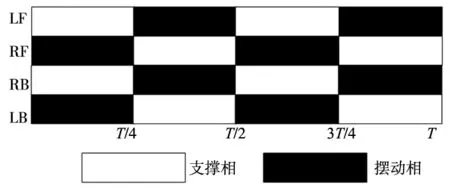
圖5 四足機(jī)器人對(duì)角步態(tài)運(yùn)動(dòng)機(jī)理
四足機(jī)器人單腿運(yùn)動(dòng)分析如圖6所示。

圖6 單腿運(yùn)動(dòng)分析
根據(jù)圖6可以得到:
(16)
根據(jù)式(16)可以求出髖關(guān)節(jié)轉(zhuǎn)角Ah和膝關(guān)節(jié)的轉(zhuǎn)角Ak。
(17)
其中,S表示機(jī)器人的步長(zhǎng),ν表示機(jī)器人的運(yùn)動(dòng)速度,β是占空比,T是機(jī)器人的運(yùn)動(dòng)周期,L是髖關(guān)節(jié)和機(jī)器人腳步落腳點(diǎn)的長(zhǎng)度。根據(jù)式(17)可以發(fā)現(xiàn)擺動(dòng)角Ak和小腿長(zhǎng)度L3以及θ0和抬腿高度h有直接關(guān)系,髖關(guān)節(jié)轉(zhuǎn)角Ah和步長(zhǎng)、占空比、大小腿長(zhǎng)度、θ0有直接關(guān)系。
4 步態(tài)規(guī)劃和仿真
4.1 對(duì)角步態(tài)規(guī)劃和仿真
在實(shí)際的設(shè)計(jì)中取θ0=26°,設(shè)定機(jī)器人的行走速度v=0.2 m/s,行走周期T=2 s,h=0.02 m,對(duì)角步態(tài)的占空比β=0.5。代入式(16)和式(17) ,可以計(jì)算出抬腿高度、髖關(guān)節(jié)轉(zhuǎn)角和膝關(guān)節(jié)的轉(zhuǎn)角。Ah=8.531,Ak=5.92。機(jī)器人在對(duì)角步態(tài)行走的時(shí)候,腰關(guān)節(jié)保持不動(dòng),只有髖關(guān)節(jié)和膝關(guān)節(jié)轉(zhuǎn)動(dòng),在一個(gè)周期內(nèi),髖關(guān)節(jié)和膝關(guān)節(jié)的角度隨著時(shí)間而變化,分別用θ2和θ3表示。各個(gè)關(guān)節(jié)的表達(dá)式如式(18)所示。
(18)
將式(18)計(jì)算的表達(dá)式導(dǎo)入ADAMS軟件中,對(duì)四足機(jī)器人進(jìn)行對(duì)角步態(tài)仿真,步態(tài)仿真如圖7所示,仿真時(shí)間設(shè)置20 s,行走10個(gè)周期。

圖7 對(duì)角步態(tài)步態(tài)仿真圖
機(jī)器人在行走過程中的質(zhì)心的變化如圖8~圖10所示。

圖8 機(jī)器人質(zhì)心X方向變化
圖8中,在X的前進(jìn)方向中,20 s的位置是3.8 m,平均速度約為0.19 m/s。這和我們公式最初設(shè)計(jì)的速度0.2 m/s基本一致。

圖9 機(jī)器人質(zhì)心Y方向變化
圖9中,在20 s內(nèi),前進(jìn)3.8 m,Y的偏移量0.12 m,反應(yīng)了機(jī)器人前進(jìn)方向上的偏離幅度,主要原因是因?yàn)闆]有設(shè)定腰關(guān)節(jié)的角度。

圖10 機(jī)器人質(zhì)心Z方向變化
圖10中,在機(jī)器人的行走過程中,機(jī)器人質(zhì)心的上下振動(dòng)幅度是0.025 m,上下振動(dòng)幅度很小。
4.2 三角步態(tài)規(guī)劃和仿真
機(jī)器人的行走速度v=0.3 m/s,行走周期T=2 s,h=0.02 m,對(duì)角步態(tài)的占空比β=0.75。代入式(16)和式(17) ,可以計(jì)算出抬腿高度、髖關(guān)節(jié)轉(zhuǎn)角和膝關(guān)節(jié)的轉(zhuǎn)角。Ah=12.857 1,Ak=5.92。機(jī)器人在對(duì)角步態(tài)行走的時(shí)候,腰關(guān)保持不動(dòng),只有髖關(guān)節(jié)和膝關(guān)節(jié)轉(zhuǎn)動(dòng),在一個(gè)周期內(nèi),髖關(guān)節(jié)和膝關(guān)節(jié)的角度隨著時(shí)間而變化,分別用θ2和θ3。各個(gè)關(guān)節(jié)的表達(dá)式如式(19)所示:
(19)
將式(19)計(jì)算的表達(dá)式導(dǎo)入ADAMS軟件中,對(duì)四足機(jī)器人進(jìn)行對(duì)角步態(tài)仿真,步態(tài)仿真如圖11所示,仿真時(shí)間設(shè)置20 s,行走10個(gè)周期。
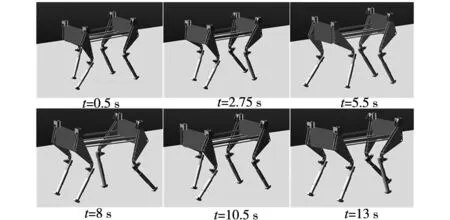
圖11 三角步態(tài)步態(tài)仿真圖
機(jī)器人在行走過程中質(zhì)心的變化如圖12~圖14所示。
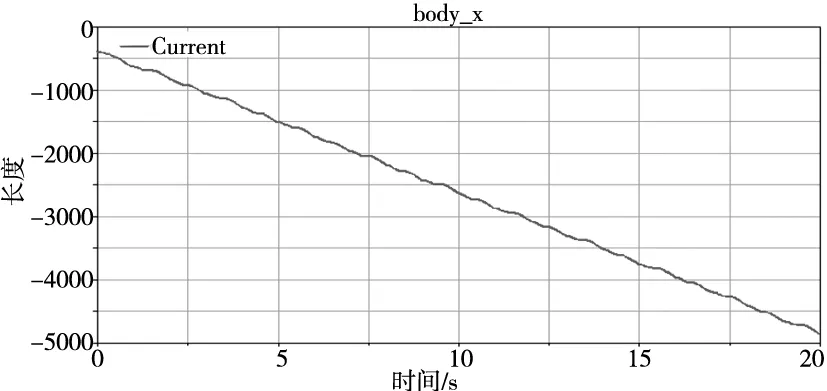
圖12 機(jī)器人質(zhì)心X方向變化
圖12所示,在X的前進(jìn)方向中,20 s的位置是6.5 m,平均速度約為0.325 m/s。這和我們公式最初設(shè)計(jì)的速度0.3 m/s基本一致。
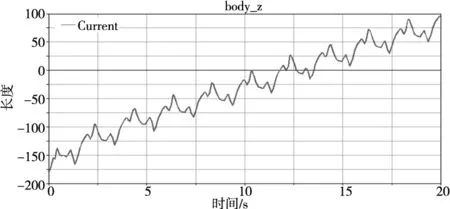
圖13 機(jī)器人質(zhì)心Y方向變化
圖13所示,在20 s內(nèi),前進(jìn)6.5 m,Y的偏移量為0.3 m,反應(yīng)了機(jī)器人前進(jìn)方向上的偏離幅度,主要原因是因?yàn)闆]有設(shè)定腰關(guān)節(jié)的角度。
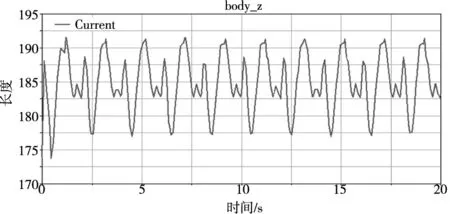
圖14 機(jī)器人質(zhì)心Z方向變化
圖14所示,在機(jī)器人的行走過程中,機(jī)器人質(zhì)心的上下振動(dòng)幅度是0.002 m,上下振動(dòng)幅度很小。
5 結(jié)論與展望
對(duì)設(shè)計(jì)的四足機(jī)器人進(jìn)行了運(yùn)動(dòng)學(xué)建模,對(duì)模型的正解和逆解進(jìn)行了數(shù)學(xué)和仿真。基于對(duì)角和三角步態(tài)進(jìn)行了步態(tài)規(guī)劃和仿真。
(1)對(duì)設(shè)計(jì)的四足機(jī)器人進(jìn)行了運(yùn)動(dòng)學(xué)建模,對(duì)模型的正解和逆解進(jìn)行了數(shù)學(xué)分析和仿真,驗(yàn)證其正確性,為后續(xù)利用MATLAB做路徑規(guī)劃做了基礎(chǔ)。
(2)分析和推導(dǎo)四條腿了髖關(guān)節(jié)和膝關(guān)節(jié)的角度表達(dá)式,為后續(xù)控制系統(tǒng)設(shè)計(jì)調(diào)占空比提供了基礎(chǔ),為分析多步態(tài)的切換提供了研究方向。
(3)基于對(duì)角步態(tài)和三角步態(tài)進(jìn)行了步態(tài)規(guī)劃,在對(duì)角步態(tài)和三角步態(tài)下利用ADAMS進(jìn)行了20 s的仿真,仿真結(jié)果符合預(yù)期。
機(jī)器人不同步態(tài)的平緩切換,以及不同地形的髖關(guān)節(jié)和膝關(guān)節(jié)的角度表達(dá)式是后期繼續(xù)研究的目標(biāo)。
