基于改進的LSTM的工業機器人柔性關節遲滯建模*
2021-08-02 08:03:28黨選舉
組合機床與自動化加工技術 2021年7期
關鍵詞:模型
黨選舉,劉 帆
(桂林電子科技大學電子工程與自動化學院,廣西 桂林 541004)
0 引言
工業機器人具有重復精度高、自動化、安全且適用性強等優勢[1]。在智能制造的背景之下,工業機器人的性能越來越強[2],同時對工業機器人的執行精度提出更高的要求。近年來,出現的輕型機器人、協作機器人等機器人采用諧波驅動器驅動關節運動。由電機與諧波減速器等組成的柔性關節所表現出的復雜非線性遲滯特性[3-4],直接影響工業機器人定位精度。對柔性關節的非線性遲滯特性進行建模,從控制角度,基于遲滯模型,通過補償控制削弱其遲滯特性的影響,成為一個重要研究課題。
基于模型的柔性關節補償控制,降低遲滯特性對定位精度的影響,建立遲滯模型是實現補償的先決條件。國內外學者關于壓電陶瓷等對象的遲滯特性建模,提出了多種方案:如Bouc-Wen模型[5]、Preisach模型等。這類模型結構較復雜,逆模型不易求解,且參數在線計算困難,難以在實時控制系統中實施。
許多學者利用神經網絡模型,描述遲滯現象。文獻[6]通過引入遲滯算子構建BP神經網絡模型,對壓電陶瓷的遲滯特性建模。文獻[7-8]采用最小二乘法多項式擬合結合神經網絡的方法,針對多遲滯環,需通過增加多項式的項數,保證模型精度,使模型結構更復雜。文獻[9]提出了基于Preisach模型的深度學習網絡的方法,建立遲滯模型,由Preisach模型特點所決定,為了覆蓋到所有的工作點,在神經網絡模型中必須采用更多隱含節點,使遲滯模型結構變得復雜。
以上大都是針對壓電陶瓷等對象,進行遲滯建模,而工業機器人柔性關節遲滯特性所表現出的復雜強非線性,對所建立的遲滯模型在非線性特性、結構簡潔等方面提出更高的要求。
LSTM能夠保存和傳遞長時間的信息,具有記憶特性[10]。本文考慮到工業機器人柔性關節的輸出與歷史輸入有關的記憶特性,采用了具有長期記憶特點的LSTM,對工業機器人柔性關節所表現出的復雜非線性遲滯特性進行建模。為了進一步提高建模精度,本文提出了基于改進的LSTM的工業機器人柔性關節遲滯建模方法。
1 LSTM遲滯模型
1.1 LSTM單元
為了解決傳統RNN網絡中存在的梯度消失與梯度爆炸問題,采用了一種特殊的RNN單元:LSTM用以代替RNN中的隱含層神經元。LSTM單元基本結構[11]如圖1所示。
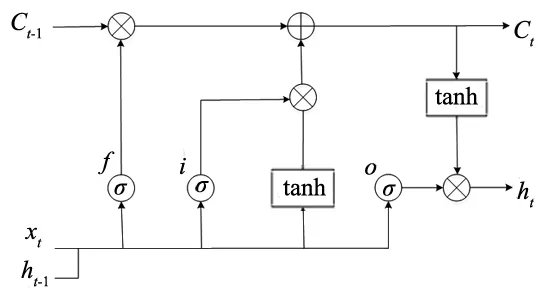
圖1 LSTM單元基本結構圖
其數學模型如下:
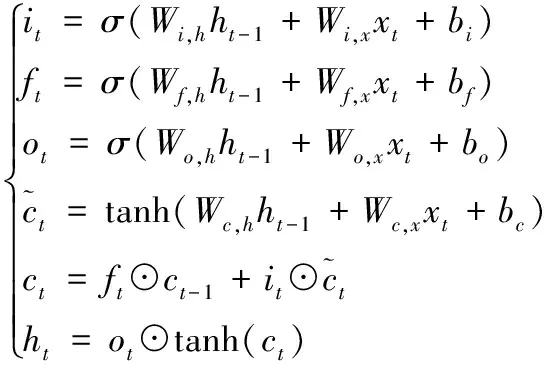
(1)

1.2 LSTM遲滯模型的構建
考慮到遲滯表現為與輸入信號歷史值有關的記憶特性,所以,本文先利用具有記憶特性的LSTM構建工業機器人柔性關節的遲滯模型。LSTM遲滯模型如圖2所示。

圖2 LSTM遲滯模型

(2)

(1)數據采集
本文搭建的工業機器人柔性關節實驗平臺是由安川GP7機械手、編程示教器、控制器、外部計算機等組成。
在柔性關節做往復運動時,在不同的運行速度下,工業機器人柔性關節表現出不同的遲滯特性。本文通過與工業機器人控制器通信的外部計算機,對機器人往復運動時的柔性關節轉矩及角度數據實時采集。表現出不同遲滯特性曲線的兩組數據,用于驗證提出的LSTM遲滯模型建模精度及泛化能力:第一組數據設定關節運行最大速度為0.55 rad/s,第二組數據設定關節運行最大速度為1.1 rad/s。
(2)LSTM遲滯模型建模與驗證

(3)
其中,yt為t時刻工業機器人柔性關節輸出角度。
輸出層的權值學習:
(4)
LSTM遲滯模型的輸入門的權值學習:
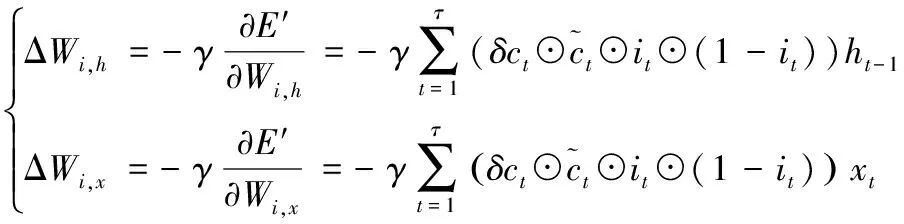
(5)
LSTM遲滯模型的遺忘門的權值學習:
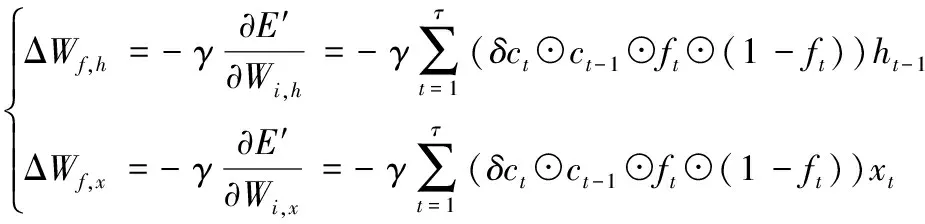
(6)
LSTM遲滯模型的輸出門的權值學習:
(7)
LSTM遲滯模型的輸入單元狀態的權值學習:
(8)
隱含層輸出ht與記憶單元ct的梯度誤差為:
(9)
LSTM遲滯模型的權值的更新:
Wt=Wt-1+ΔWt
(10)
其中,γ為學習速率;W代指LSTM遲滯模型中所有的網絡權值。
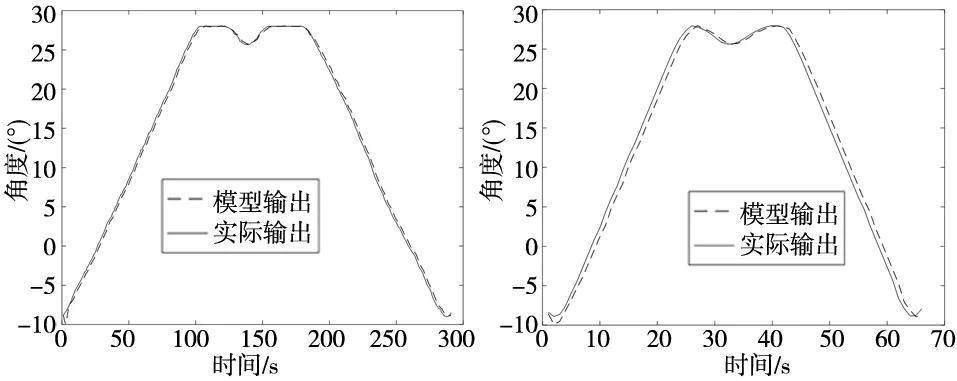
圖3 LSTM遲滯模型的建模輸出 圖4 LSTM遲滯模型的驗證輸出
圖3為LSTM遲滯模型的建模輸出、圖4為LSTM遲滯模型的驗證輸出。由圖3和圖4可知,在LSTM遲滯建模與驗證中,LSTM遲滯模型的輸出曲線與工業機器人柔性關節的輸出曲線存在幅值方面的差異以及相位的滯后性。針對該問題,提出了一個改進的LSTM遲滯模型。
2 改進的LSTM遲滯模型
為了對LSTM遲滯模型的輸出信號在幅值和相位上進行補償,對LSTM進行改進,在LSTM遲滯模型后串聯一個RBF動態神經網絡,稱為改進的LSTM遲滯模型。
2.1 RBF動態神經網絡
RBF神經網絡具有計算量少、學習速度快、學習方法簡單等優點,同時具有良好的數據局部逼近能力以及泛化能力。改進的LSTM神經網絡結構如圖5所示。
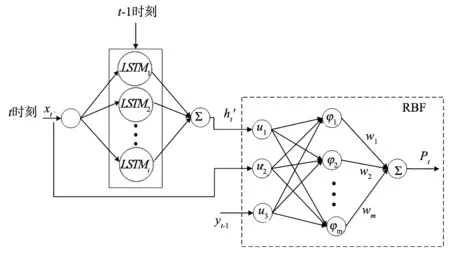
圖5 改進的LSTM神經網絡結構圖
圖5中,RBF動態神經網絡是一種三層前饋神經網絡:輸入層、隱含層和輸出層。輸入信號為:
(11)
其中,yt-1為工業機器人柔性關節的前一時刻的角度。
RBF動態神經網絡模型如下:
(12)
(13)

根據文獻[12],當損失函數過大時,RBF動態神經網絡通過梯度下降法調整網絡權值。網絡的損失函數為:
(14)
網絡權值調節:
(15)
其中,η為學習速率,α為動量因子。
2.2 改進的LSTM遲滯模型及參數學習
所提出改進的LSTM遲滯模型及參數學習如圖6所示,由兩部分串聯組成:第一部分是LSTM遲滯模型,模型輸入為柔性關節的轉矩xt;第二部分是RBF動態神經網絡,在RBF輸入信號中加入柔性關節前一時刻的輸出值,使神經網絡具有動態特性。

圖6 改進的LSTM遲滯模型
3 改進的LSTM遲滯模型驗證
用兩組數據,對所提出的改進的LSTM遲滯模型進行驗證,并與LSTM遲滯模型比較。在改進的LSTM遲滯模型中,LSTM隱含層節點取10個,RBF隱含層節點取10個。
3.1 LSTM遲滯模型建模與驗證
基于LSTM遲滯模型,對采集到的工業機器人柔性關節的第一組數據建模。建模效果如圖7所示。圖8為對應建模誤差,其建模的最大絕對誤差和均方誤差分別為1.545 7°和0.226 3。
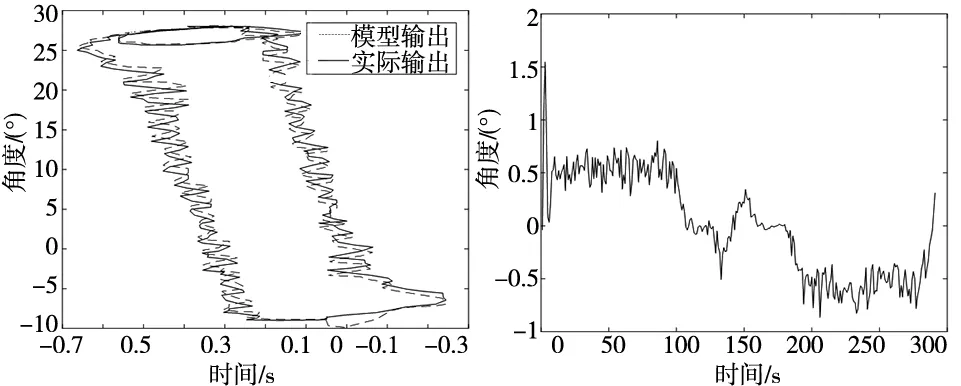
圖7 LSTM遲滯模型的建模 圖8 LSTM遲滯模型的建模誤差
為了驗證LSTM遲滯模型的適應性能力,用第二組數據對遲滯模型進行驗證。
圖9為LSTM遲滯模型驗證效果,圖10為對應驗證誤差,其最大絕對誤差和均方誤差分別為1.881 7°和1.174 0。
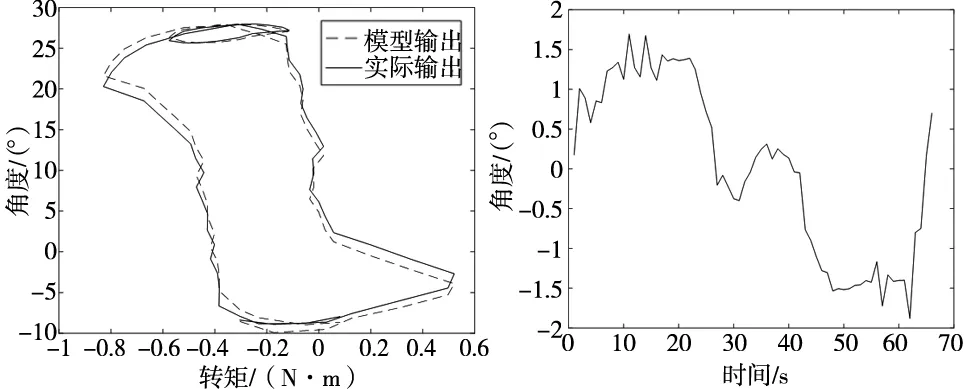
圖9 LSTM遲滯模型的驗證 圖10 LSTM遲滯模型的驗證誤差
3.2 改進的LSTM遲滯模型建模與驗證
基于改進的LSTM遲滯模型,對采集到的工業機器人柔性關節的第一組數據進行建模。圖11為建模效果,圖12為對應建模誤差,其模型的最大絕對誤差和均方誤差分別為0.776 8°和0.024 7。
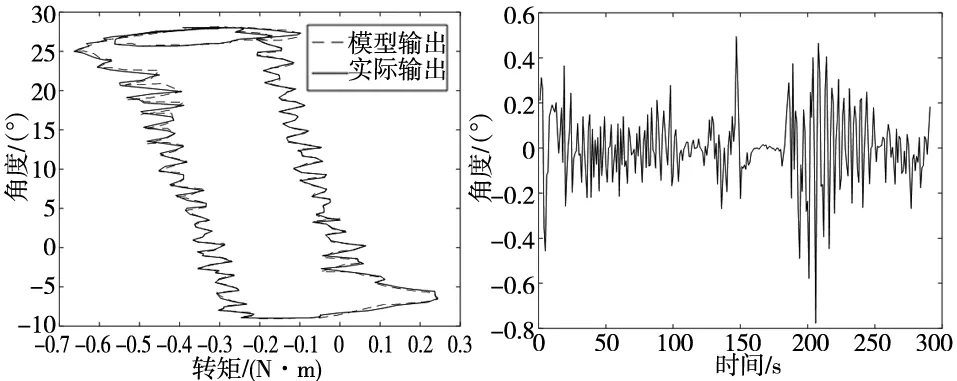
圖11 改進的LSTM遲滯模型的建模 圖12 改進的LSTM遲滯的建模誤差
為了驗證改進的LSTM遲滯模型的泛化能力,用第二組數據對遲滯模型進行驗證。
驗證效果及驗證誤差如圖13、圖14所示。改進后的遲滯模型驗證的最大絕對誤差和均方誤差分別為1.218 0°和0.064 3。
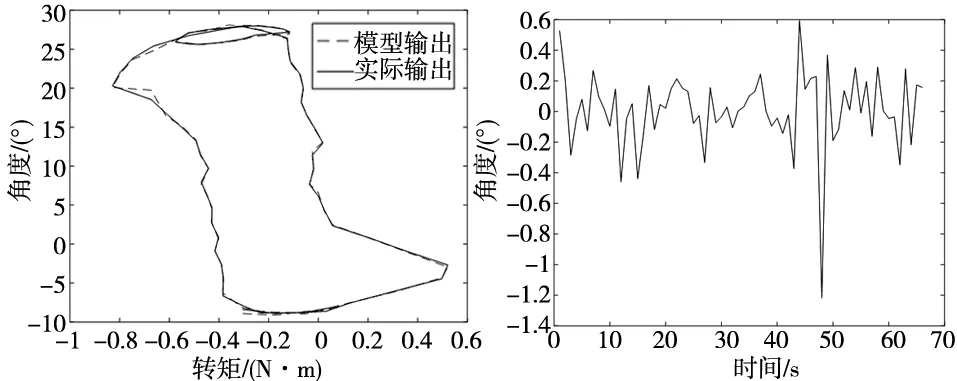
圖13 改進的LSTM遲滯模型的驗證 圖14 改進的LSTM遲滯模型的驗證誤差
3.3 實驗數據仿真結果比較與分析
遲滯模型的建模均方誤差和驗證均方誤差的對比如表1所示。實驗數據仿真結果表明,LSTM遲滯模型基本可以描述出工業機器人柔性關節的非線性遲滯關系,但在相位上存在滯后誤差,尤其在模型驗證中滯后明顯。改進的LSTM遲滯模型的建模精度與驗證精度都高于改進前的LSTM遲滯模型。

表1 模型的均方誤差
4 結論
針對工業機器人柔性關節的復雜非線性遲滯特性,為了得到高精度遲滯模型,從造成模型誤差的幅值與相位兩個角度考慮,對人工智能中的長短時記憶模型(LSTM)進行改進, 將LSTM遲滯模型與RBF動態模型相融合,構建了一個改進的LSTM遲滯模型。實驗數據仿真結果表明,與LSTM遲滯模型比較,改進的LSTM遲滯模型,對工業機器人柔性關節遲滯特性建模,具有更高的精度和泛化能力,為基于模型的工業機器人柔性關節高精度補償控制,提供了基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
