一種智能輔助藥箱機(jī)構(gòu)設(shè)計(jì)與分析
2021-06-18 06:16:46劉人菊陳胡陳軍談杰明郝曉曦
機(jī)械工程師 2021年6期
劉人菊, 陳胡, 陳軍, 談杰明, 郝曉曦
(五邑大學(xué) 智能制造學(xué)部,廣東 江門529020)
0 引言
傳統(tǒng)醫(yī)院藥品分發(fā)流程是: 藥劑師根據(jù)醫(yī)生的藥方配制藥品,交付給病房護(hù)士,然后由護(hù)士分發(fā)藥物。在這段時(shí)間里,藥物信息將按照“三查七對(duì)”[1]的原則進(jìn)行檢查,最后護(hù)士向病患解釋說明藥物的使用方法和禁忌, 并在核發(fā)表上簽名。其中,“三查七對(duì)”耗費(fèi)了護(hù)士的大量精力。如果加上送藥時(shí)間,則護(hù)士會(huì)消耗更多時(shí)間在整個(gè)藥品分發(fā)過程。因此,為了克服手工分發(fā)藥品費(fèi)時(shí)費(fèi)力的缺點(diǎn),設(shè)計(jì)一種新型實(shí)用設(shè)備——智能輔助藥箱。其目的是減少醫(yī)療事故的發(fā)生和減輕醫(yī)護(hù)人員的工作負(fù)擔(dān)。

圖1 智能輔助藥箱外部結(jié)構(gòu)
1 智能輔助藥箱總體結(jié)構(gòu)設(shè)計(jì)
如圖1所示,箱體分為3層,分別是上、中、下層,上層安裝升降云臺(tái)機(jī)構(gòu)及其控制系統(tǒng),中層為箱體主體機(jī)構(gòu),配置4個(gè)裝載藥品的門,箱體底層為漏斗收集口、出倉(cāng)槽和外置檢驗(yàn)攝像頭。
箱體頂層設(shè)置箱體門禁系統(tǒng),只需要用IC門卡靠近頂部感應(yīng)器,4個(gè)門的電子鎖就會(huì)打開,進(jìn)入裝載藥品模式。箱體頂部還設(shè)置有人機(jī)交互觸摸屏,用于箱體內(nèi)系統(tǒng)的控制。
箱體中層為箱體主要機(jī)構(gòu)部分,分為4個(gè)裝配箱門,每個(gè)門的開合都設(shè)置位置傳感器,作為箱體運(yùn)作時(shí)裝藥模式與送藥模式的基礎(chǔ)轉(zhuǎn)換條件,箱體門設(shè)置隱藏門把。
箱體底部裝有與智能導(dǎo)航尋跡車[2]接合的卡槽孔位,只需將其與小車上的螺桿孔位對(duì)齊,通過螺栓連接,便可固定在小車上,實(shí)現(xiàn)智能藥箱的自動(dòng)尋跡送藥功能。底層的長(zhǎng)邊一側(cè)是二維碼外置攝像頭和出倉(cāng)槽,可根據(jù)實(shí)際情況定制安裝位置,另一側(cè)為電源與系統(tǒng)的散熱風(fēng)口門。
智能輔助藥箱外觀大致為長(zhǎng)方體,具體規(guī)格約為57 cm ×24.7 cm×90 cm,每層板厚2 mm,采用不銹鋼材料制作[3]。可按照醫(yī)院內(nèi)住院人數(shù)變更箱體裝藥規(guī)模,通過改變箱體內(nèi)的裝載器皿排列數(shù)量,修改箱體長(zhǎng)寬尺寸,以適應(yīng)多功能任務(wù)需要。
2 關(guān)鍵結(jié)構(gòu)與特點(diǎn)
2.1 送藥機(jī)構(gòu)的設(shè)計(jì)
送藥機(jī)構(gòu)位于箱體門板上,是整個(gè)裝置的重要的關(guān)鍵部件之一。其主要作用是實(shí)現(xiàn)儲(chǔ)藥和彈藥功能。由運(yùn)動(dòng)部件和支撐部件組成,如圖2所示。
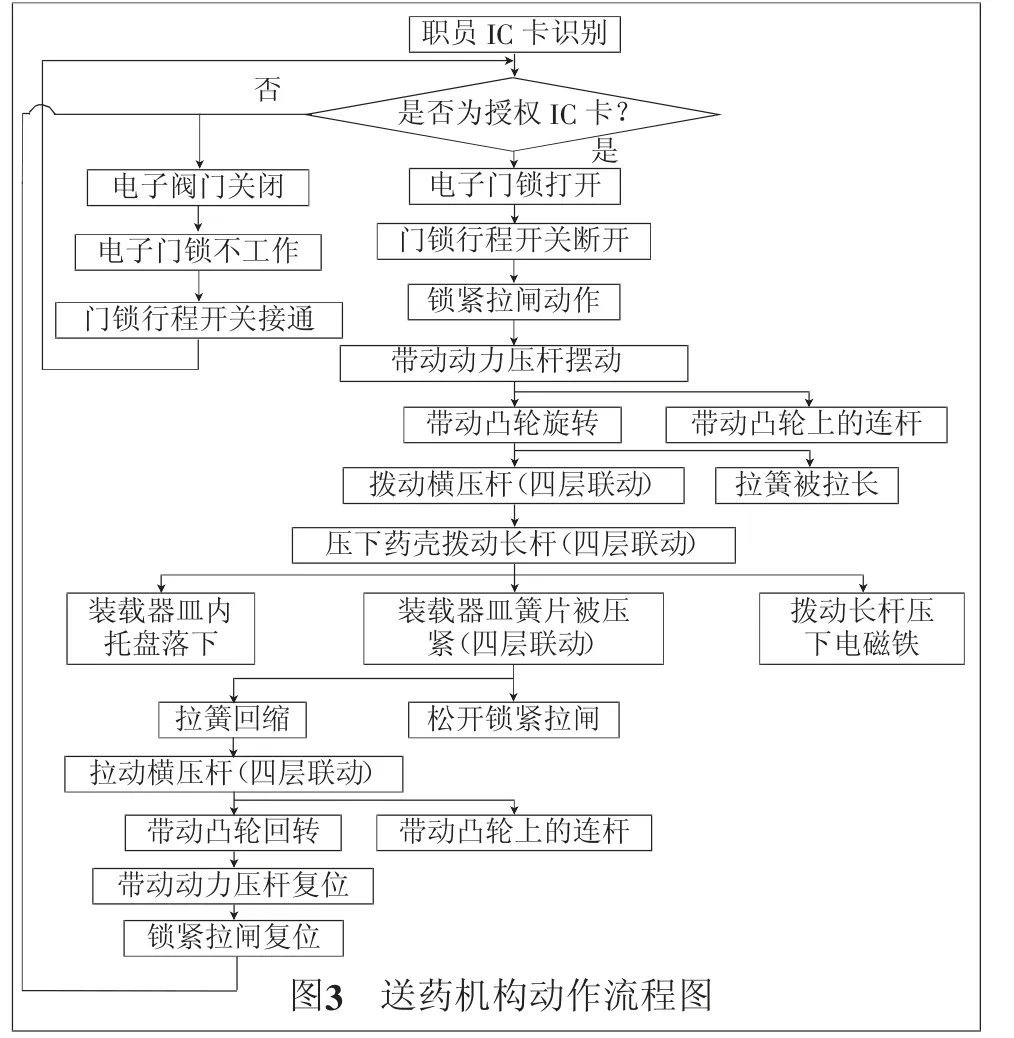
具體的工作流程如圖3所示。開始時(shí)每個(gè)盒子都位于初始已推送狀態(tài)(盒子內(nèi)的彈簧片沒有壓緊,當(dāng)手動(dòng)拉下頂部的鎖緊拉閘,拉閘通過動(dòng)力壓桿帶動(dòng)裝配箱兩邊的凸輪,凸輪通過連桿帶動(dòng)每一層的凸輪一起轉(zhuǎn)動(dòng),凸輪轉(zhuǎn)動(dòng)將每層的橫壓桿往下壓。每個(gè)盒子后方伸出一個(gè)撥動(dòng)長(zhǎng)桿并配置一個(gè)電磁鐵,供橫壓桿動(dòng)作時(shí)鎖緊盒子內(nèi)部彈簧片使用。當(dāng)鎖緊拉閘拉到極限位置時(shí),橫壓桿將每一層的盒子的撥動(dòng)長(zhǎng)桿壓下至電磁鐵鎖頭下端實(shí)現(xiàn)鎖緊盒子內(nèi)的彈簧片作用,使盒子處于預(yù)推送狀態(tài)。此時(shí)松開鎖緊拉閘,拉閘和凸輪將會(huì)在橫壓桿兩端布置的拉伸彈簧作用下復(fù)位至初始狀態(tài)。

圖2 送藥機(jī)構(gòu)圖
當(dāng)需要釋放盒子中的藥品袋時(shí),將電磁鐵通電,電磁鐵動(dòng)作回縮鎖頭釋放撥動(dòng)長(zhǎng)桿,在彈簧片的彈性勢(shì)能下將托盤上的藥品袋推送出去,藥品袋落入中置的出倉(cāng)漏斗平臺(tái)。
2.2 藥盒機(jī)構(gòu)設(shè)計(jì)
藥盒是送藥機(jī)構(gòu)的核心部分,作為儲(chǔ)藥和彈藥的裝載體,如圖4所示,其主要由導(dǎo)柱托盤、導(dǎo)槽外殼、撥動(dòng)長(zhǎng)桿、支撐連桿、銷、彈簧片和外殼等組成。導(dǎo)柱托盤用于托住藥袋,導(dǎo)槽外殼背部開有3個(gè)豎列槽,用于定位導(dǎo)柱托盤水平下移防止傾斜。在鎖緊拉閘向下拉動(dòng)時(shí),聯(lián)動(dòng)機(jī)構(gòu)下壓藥盒后部的撥動(dòng)長(zhǎng)桿,帶動(dòng)導(dǎo)柱托盤下移,彈簧片被壓縮。設(shè)計(jì)過程中要保證豎列槽邊緣的光滑度,防止導(dǎo)柱托盤沿導(dǎo)槽外殼豎列槽滑動(dòng)時(shí)所受摩擦力大于彈簧片對(duì)托盤的支撐力,破壞機(jī)構(gòu)整體運(yùn)動(dòng)。
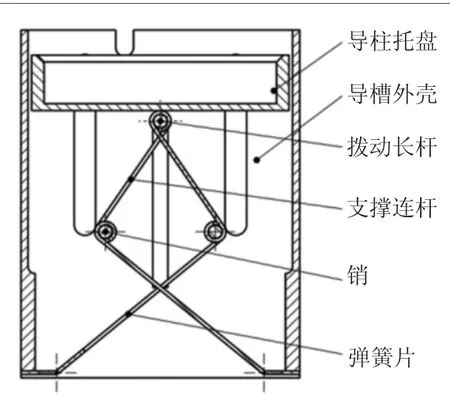
圖4 藥盒結(jié)構(gòu)圖
2.3 信息校驗(yàn)機(jī)構(gòu)設(shè)計(jì)
信息校驗(yàn)機(jī)構(gòu)主要由伸縮導(dǎo)軌、360°旋轉(zhuǎn)云臺(tái)、步進(jìn)電動(dòng)機(jī)、攝像頭等部件組成,通過在箱體內(nèi)部的頂部中置一個(gè)伸縮線性機(jī)構(gòu)(由伸縮導(dǎo)軌構(gòu)成) 和360°旋轉(zhuǎn)云臺(tái)(并且具有一定的俯仰角度功能),云臺(tái)上安置攝像頭可360°定位旋轉(zhuǎn)識(shí)別藥瓶條形碼(或二維碼)。完成對(duì)藥盒內(nèi)藥品信息與系統(tǒng)內(nèi)信息的最后一步校驗(yàn)工作,以此確保所分發(fā)藥品為唯一指定藥品,避免錯(cuò)發(fā)的事故發(fā)生。因此,信息校驗(yàn)機(jī)構(gòu)也是智能輔助送藥箱的重要一環(huán)。
由于本環(huán)節(jié)攝像頭作為核心零件,如選取精度指標(biāo)不合格,嚴(yán)重影響校驗(yàn)效果,設(shè)計(jì)要求攝像頭的最小有效識(shí)別距離應(yīng)為5 cm,同時(shí)應(yīng)考慮區(qū)域范圍,攝像頭的長(zhǎng)、寬不應(yīng)大于14 cm,并保證信息校驗(yàn)的穩(wěn)定、可靠。
3 系統(tǒng)控制流程
智能輔助藥箱的控制系統(tǒng)采用stm32F103作為主控制器。控制系統(tǒng)通過觸摸屏設(shè)置初始命令,限位開關(guān)、二維碼讀取器作為輸入信號(hào),主控通過讀取二維碼的信號(hào)進(jìn)行信息校對(duì),根據(jù)校驗(yàn)結(jié)果響應(yīng)執(zhí)行機(jī)構(gòu)動(dòng)作,系統(tǒng)結(jié)構(gòu)框圖如圖5所示。

圖5 智能輔助藥箱控制系統(tǒng)結(jié)構(gòu)框圖

圖6 控制系統(tǒng)主流程圖
控制系統(tǒng)主流程圖如圖6所示。主要分為裝藥模式和校驗(yàn)?zāi)J健F渲校b藥模式是利用IC門卡識(shí)別使用者身份確定是否授權(quán)后再開門,開門后行程開關(guān)斷開激活條形碼識(shí)別模塊識(shí)別信息和光敏電阻模塊(記錄藥品物理地址并轉(zhuǎn)換為信息地址儲(chǔ)存)。校驗(yàn)?zāi)J酵ㄟ^外置條形碼識(shí)別病患信息,尋找系統(tǒng)內(nèi)相對(duì)應(yīng)的藥品信息,對(duì)藥品尋址控制中置導(dǎo)軌云臺(tái)機(jī)構(gòu)上的條形碼識(shí)別,攝像頭再次檢測(cè)校對(duì)信息,校對(duì)正確無(wú)誤后控制電磁鐵的開合,藥品袋被推送至底部的滑臺(tái)出倉(cāng)至指定位置,最后語(yǔ)音模塊對(duì)藥品信息與醫(yī)囑進(jìn)行反饋。
具體動(dòng)作指令為:首先護(hù)士準(zhǔn)備進(jìn)行裝藥階段,利用IC卡判斷職員身份,如果不符合身份,則電子門鎖不動(dòng)作,如果符合身份,則電子門鎖打開;開啟箱門后,門旁限位開關(guān)輸出高電平,控制器控制開關(guān)打開二維碼、光敏電阻的電源;識(shí)別藥品信息,如果識(shí)別錯(cuò)誤,則提示識(shí)別失敗,并返回上一步,繼續(xù)藥品識(shí)別,如果正常,則進(jìn)行地址存儲(chǔ)。地址存儲(chǔ)錯(cuò)誤則亮紅燈,回到上一步,地址存儲(chǔ)正確則亮綠燈;裝藥完成,關(guān)閉箱門,限位開關(guān)變?yōu)榈碗娖剑袛嘞鋬?nèi)條形碼識(shí)別和藥品識(shí)別存儲(chǔ)。若未完成,則繼續(xù)裝藥。判斷觸摸屏是否開啟送藥模式,如果開啟,則進(jìn)行智能尋跡小車尋跡送藥,否則待機(jī)休眠。小車行駛至指定位置后,進(jìn)行掃碼識(shí)別,由主控判斷信息是否匹配,如果不對(duì),則進(jìn)行信息報(bào)警,如果正確則開啟信息內(nèi)部自檢,使得步進(jìn)電動(dòng)機(jī)動(dòng)作帶動(dòng)攝像頭進(jìn)行掃描自檢,再由主控判斷自檢信息是否正確,如果不正確,則進(jìn)行信息報(bào)警,如果自檢信息正確,主控輸出動(dòng)作脈沖信號(hào),讓對(duì)應(yīng)的藥盒后背電磁鐵頭吸合,彈出藥盒。同時(shí),程序指令控制減速電動(dòng)機(jī)動(dòng)作,齒輪帶動(dòng)齒條傳動(dòng),使得測(cè)量模塊滑出。當(dāng)對(duì)射光電傳感器輸出個(gè)高電平時(shí),減速電動(dòng)機(jī)反轉(zhuǎn),測(cè)量模塊復(fù)位。程序判斷送藥是否完成,如果完成智能尋跡小車尋跡回程,待機(jī)休眠,否則返回程序,繼續(xù)送藥。
隨著數(shù)字孿生技術(shù)的日益成熟,技術(shù)人員可以在PC上實(shí)時(shí)觀察并控制小車行跡和送藥過程。數(shù)字孿生關(guān)鍵過程為“數(shù)化”,即將物理對(duì)象轉(zhuǎn)化為可以度量的數(shù)據(jù),再通過數(shù)據(jù)建立合理的數(shù)字化模型。“數(shù)化”是建立數(shù)字孿生體的第一步,也是數(shù)字孿生技術(shù)的基石。數(shù)字化的核心技術(shù)之一為建模,只有模型建立正確并得到完整的輸入信息,仿真得到的結(jié)果才能符合實(shí)際。智能輔助藥箱的模型在NX12.0環(huán)境下建立,NX軟件下的MCD模塊可以將裝配體分解為機(jī)械、電氣、自動(dòng)化的通用語(yǔ)言,通過OPC通信協(xié)議,將模型與PLC程序建立聯(lián)系,得到機(jī)電一體化產(chǎn)品的自動(dòng)化行為的正確仿真結(jié)果。
4 結(jié)語(yǔ)
目前,市面上尚未出現(xiàn)能夠自動(dòng)派發(fā)醫(yī)療藥品的輔助醫(yī)療設(shè)備。本課題設(shè)計(jì)的智能輔助送藥設(shè)備能實(shí)現(xiàn)對(duì)病患藥品識(shí)別、存取和檢驗(yàn)信息[4]的功能。幫助醫(yī)護(hù)人員完成簡(jiǎn)單、重復(fù)的日常發(fā)送藥品工作,為繁忙的醫(yī)院節(jié)省出大量人工成本[5],提高工作效率的同時(shí)還可以降低護(hù)士的人為出錯(cuò)率。
猜你喜歡
中國(guó)合理用藥探索(2022年1期)2022-11-26 00:22:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
中國(guó)衛(wèi)生(2016年5期)2016-11-12 13:25:28
中國(guó)衛(wèi)生(2015年5期)2015-11-08 12:09:48
中外會(huì)展(2014年4期)2014-11-27 07:46:46