基于雙磁致伸縮材料棒的電動靜液執(zhí)行機構(gòu)技術(shù)研究
2021-06-18 06:17:04周文君
機械工程師 2021年6期
周文君
(山西天地煤機裝備有限公司 內(nèi)蒙古分公司,內(nèi)蒙古鄂爾多斯017209)
0 引言
電動飛機被認為是未來飛機發(fā)展的一種選擇,并且已經(jīng)應用于少數(shù)飛機[1]。靜液壓致動器(EHA)是電動飛機的主要部分,主要用于控制飛機的飛行控制面,其性能決定了整個系統(tǒng)的可靠性[2]。因此,高性能EHA的開發(fā)意義重大。智能材料是一種新型的功能材料,是重要的能量轉(zhuǎn)換設(shè)備。考慮到它們具有高頻響應和高功率密度的特性,一些研究檢查了由智能材料組成的EHA[3]。
通常,由智能材料驅(qū)動的EHA由智能材料泵、整流閥、液壓缸和流路組成[4],其中整流閥分為主動閥和被動閥。由于被動閥的響應速度在高頻率下還不夠高,因此在本研究中使用主動閥作為整流閥進行了仿真研究。
鑒于單個智能材料單元產(chǎn)生的位移很小,最近使用多種智能材料作為驅(qū)動器來放大輸出位移或?qū)崿F(xiàn)不同的運動的情況已引起了人們廣泛的研究興趣。例如,相關(guān)研究人員于2010年提出了一種由壓電堆驅(qū)動的旋轉(zhuǎn)電動機的機構(gòu)和設(shè)計方法[5]。在這項研究中,將相同的電壓信號同時施加到2個壓電堆上,并且中心轉(zhuǎn)子因摩擦而旋轉(zhuǎn)。該旋轉(zhuǎn)電動機可實現(xiàn)正向和負向旋轉(zhuǎn),最大負載分別為74 N和78 N。本文提出了一種由兩種巨大的磁致伸縮材料組成的復合驅(qū)動器的機電轉(zhuǎn)換器(GMM)棒。兩個GMM桿通過Z型套筒組合在一起,以實現(xiàn)GMM執(zhí)行器的高位移輸出。
本文研究的目的是設(shè)計1個基于雙磁致伸縮棒的靜液壓執(zhí)行機構(gòu)(DMEHA),描述其工作原理,并將輸出流量與基于單個磁致伸縮棒的靜液壓執(zhí)行機構(gòu)(SMEHA)進行比較。為了比較它們的性能,2個致動器中的磁致伸縮材料棒(MMR)的總長度和線圈匝數(shù)相等。為了實現(xiàn)氣缸的雙向輸出位移,采用了兩個輸入電流信號的初始相位角。此外,由于使用了主動旋轉(zhuǎn)閥,DMEHA可以實現(xiàn)更高的峰值流量。這與由于使用傳統(tǒng)的被動簧片閥而呈現(xiàn)出較小峰值流量的其他EHA相反。
1 結(jié)構(gòu)與工作原理

圖1 DMEHA三維模型圖
DMEHA的三維模型如圖1所示,它由2個基于磁致伸縮材料的泵(MMP)、主動旋轉(zhuǎn)閥、液壓缸和歧管組成。2個MMP的安裝位置相互成90°。
主動旋轉(zhuǎn)閥將2個MMP的出口連接到歧管的不同油路,以使一個泵吸入的油在工作過程中不會干擾另一泵排出的油。DMEHA的工作過程:當泵1處于排油階段時,則泵2處于吸油階段。經(jīng)過主動旋轉(zhuǎn)閥的校正后,泵1排放的機油流向端口1,而端口2的機油流向泵2。另外,當泵1處于吸油階段時,泵2處于排油階段。經(jīng)過主動旋轉(zhuǎn)閥的校正后,端口2的油流向泵1,而泵2排出的油流向端口1。端口1始終用作排油端口,端口2始終用作吸油端口。因此,如果2個MMP的驅(qū)動頻率與主動旋轉(zhuǎn)閥的頻率相匹配,則液壓缸將實現(xiàn)連續(xù)排量。
2 數(shù)學模型
基于DMEHA的結(jié)構(gòu),本文重點進行了磁性材料泵(MMP)模型研究。
圖2所示為磁性材料泵的示意圖。信號發(fā)生器產(chǎn)生的電壓信號通過功率放大器轉(zhuǎn)換為線圈的輸入電流。當向線圈施加交流電時,會在磁性材料泵的軸向方向上產(chǎn)生交變磁場,并使磁性材料泵顯示相應的輸出位移,從而使柱塞運動。貝爾維爾彈簧用于線性化磁性材料泵的輸出。基于上述工作原理,磁性材料泵運動過程的數(shù)學模型分為3個部分:電壓-電流轉(zhuǎn)換模型,磁性材料泵的位移-力模型和機械動力學模型。
電壓-電流轉(zhuǎn)換模型:功率放大器通過電阻電容(RC)網(wǎng)絡(luò)控制負載電流的大小。因此,功率放大器的數(shù)學模型被描述為二階系統(tǒng),功率放大器二階系統(tǒng)函數(shù)的數(shù)學表達式為

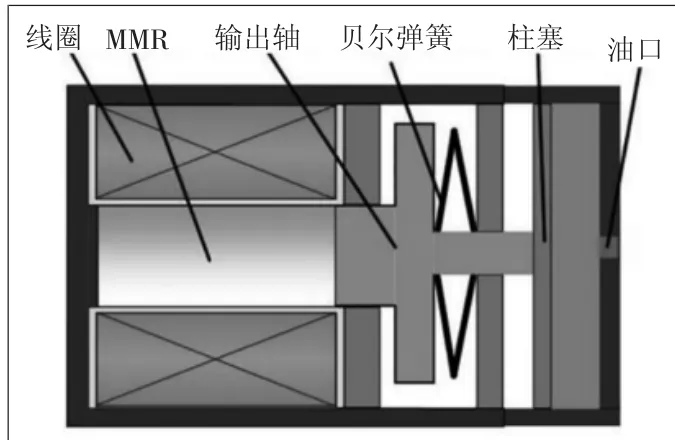
圖2 磁性材料泵模型示意圖
式中:G(s)為功率放大器二階系統(tǒng)函數(shù);kU為功率放大器的放大系數(shù);T為RC網(wǎng)絡(luò)的時間常數(shù);s為負載電流;ωU、ξU分別表示二階系統(tǒng)的固有頻率和阻尼比。
鑒于功率放大器的內(nèi)部電路很復雜,將階躍信號和一些不同頻率的正弦信號提供給功率放大器,以識別式(1)中的4個主要參數(shù)及4個主要參數(shù)不等式。
MMR的位移力模型:使用壓電系數(shù)并通過線性化表示MMR的位移力模型。當線圈以電流I通電時,MMR中的磁通量Φ滿足以下表達式:

式中:N為線圈匝數(shù);Rg為磁阻;x為MMR的輸出位移;d33為線圈通徑。
磁致伸縮力F的表達式為

式中:k表示渦流常數(shù);Φ表示渦流深度;d33為線圈通徑。
3 仿真模型與分析
基于上述數(shù)學模型,本文建立了MATLAB/Simulink模型,分析了仿真模型的一些主要參數(shù)設(shè)置。為了分析主動旋轉(zhuǎn)閥的流量,將兩個振幅為6 A、直流偏置為3 A、頻率為50 Hz的正弦電流信號施加到泵1和泵2。泵1和泵2的電流信號和流量如圖3所示,其中Q1in和Q2in分別表示從旋轉(zhuǎn)閥吸入到泵1和泵2的油的流量,而Q1out和Q2out分別表示從泵1和泵2排放到旋轉(zhuǎn)閥的油的流量。
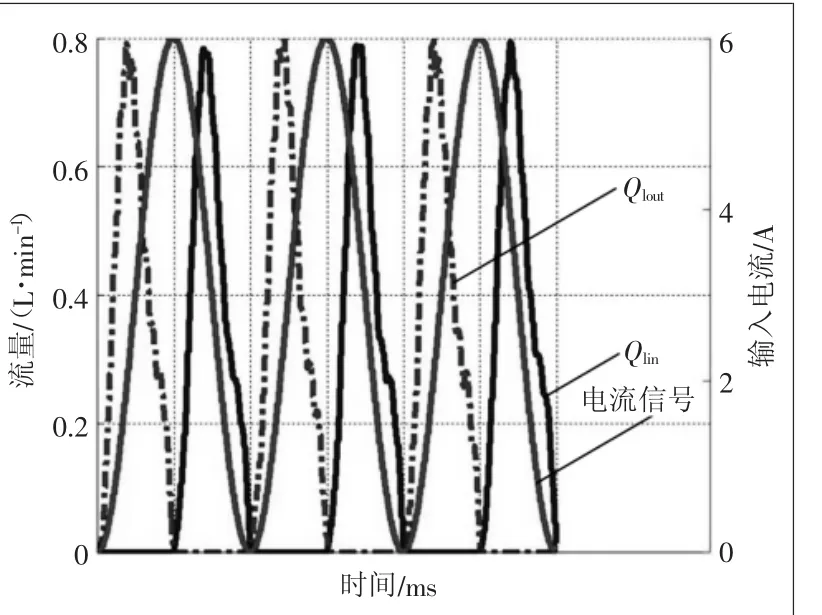
圖3 仿真模型分析結(jié)果
如圖3 仿真模型分析結(jié)果所示,在仿真過程中,x軸表示時間(以ms 為單位),由于2 個信號之間的相位差,泵1的輸入電流信號在0~10 ms內(nèi)逐漸增加,而泵2的輸入電流信號在同一時間段內(nèi)減小。因此,泵1連續(xù)排出油,而泵2連續(xù)吸入油。此外,泵最初先升高然后降低。同時,泵壓力也先升高然后降低。在10~20 ms內(nèi),泵1的輸入電流信號逐漸減小,而泵2的輸入電流信號逐漸增大,因此,泵1持續(xù)吸油,而泵2持續(xù)排放油。在整個過程中,均通過旋轉(zhuǎn)閥進行流量整流,旋轉(zhuǎn)閥將來自排放泵的流量引導至出口端。整流作用導致油流不斷,而油流又產(chǎn)生了氣缸活塞的連續(xù)運動。
4 結(jié)論
本文設(shè)計了雙磁致伸縮棒的靜液壓執(zhí)行機構(gòu)的新結(jié)構(gòu),并提出了其工作原理:1)一個簡單而緊湊的主動旋轉(zhuǎn)閥用于執(zhí)行油流整流,以實現(xiàn)執(zhí)行器的連續(xù)位移。根據(jù)執(zhí)行機構(gòu)各部分的工作原理,建立了仿真模型,其結(jié)果與實驗結(jié)果吻合良好。2)將新雙磁致伸縮棒的靜液壓執(zhí)行機構(gòu)的性能與基于單個磁致伸縮棒的靜液壓執(zhí)行機構(gòu)的性能進行了比較。結(jié)果表明,雙磁致伸縮棒的靜液壓執(zhí)行機構(gòu)的最大輸出流量在150 Hz的驅(qū)動頻率下為2.61 L/min,而基于單個磁致伸縮棒的靜液壓執(zhí)行機構(gòu)的最大輸出流量在110 Hz的驅(qū)動頻率下為1.2 L/min。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03