主動配電網饋線自動化動作效果評估方法
2021-05-21 04:47:36王秀茹韓少華王科龍
哈爾濱理工大學學報 2021年2期
邱 冬, 王秀茹, 張 科, 劉 剛, 韓少華, 王科龍
(1.國網江蘇省電力有限公司宿遷供電分公司,安徽 宿遷 223800; 2.上海金智晟東電力科技有限公司,上海 200000)
0 引 言
饋線自動化系統是配電網安全可靠、穩定運行的技術保障, 是建設智能配電網、實現能源互聯網的基礎。借助于快速發展的自動化技術、通信技術和物聯網技術, 饋線自動化系統能夠實現對饋線線路運行情況的實時監控以及終端信息的實時采集和處理[1-3]。在配電網故障時, 饋線自動化系統能夠及時將現場故障信息上傳至配網主站或就地型終端, 并自動隔離故障區域并恢復非故障區域的線路供電, 從而提高配電網供電可靠性[4-7]。
饋線自動化系統可靠性測試是其實用化運行的前提, 已有學者對這一問題開展研究。文[8]介紹了配電自動化系統中設備、主站的測試方法、測試內容、測試環境及功能規范。文[9]提出了一種在配電終端注入故障特性數據的終端注入測試法。文[10]對饋線自動化算法特點進行細致分析, 并提出計及通信故障、開關設備拒動、饋線運行方式改變等多種干擾因素影響的針對離散型軟件算法可靠性的量化評價方法。文[11]建立了基于并行計算的饋線自動化仿真測試環境。文[12]提出了開關拒動、保護信號失真、通信通道障礙時提高饋線自動化系統可靠性的保障措施。文[13]基于貝葉斯分析方法, 在信息缺失情形下, 提出將故障信息與其他有關信息相融合的配電網容錯故障診斷及故障恢復策略。
當前配電網技術快速發展, DG、柔性負載的接入引起網架結構、潮流分布變化, 使得原有饋線自動化系統的配置和整定計算變得更為復雜[14-17]。針對這一問題, 文[18]通過分析故障前后電流相角的變化, 提出了一種基于正序電流相角突變向量的配電網電流縱聯方向保護方案。文[19]針對不同的饋線結構, 研究了適應性差動保護動作判據和整定原則, 并提出了基于故障數據的電流信息自同步方法。文[20]考慮在故障發生后, 綜合利用備用聯絡線容量和DG的孤島運行能力為非故障區域恢復供電, 提高配電網供電可靠性的方法。但上述文獻均未對配電網中饋線自動化動作本身進行考慮, 文[21]提出了有源配電網的饋線自動化效果評價指標和方法, 但該方法對饋線自動化動作過程的描述過于簡單。
基于以上所述, 本文研究了主動配電網饋線自動化動作效果評價方法。首先, 提出配電網饋線自動化過程中的負荷狀態定義, 并分析了主動配電網中饋線自動化動作干擾因素。之后, 從饋線自動化動作過程和動作結果兩個角度著手, 定義了7個定量評價指標, 并建立了主動配電網饋線自動化動作評估體系。在此基礎上, 基于無失效測試法, 提出了主動配電網饋線自動化動作評估方法。最后, 以5站所雙環網結構的饋線自動化系統測試為例, 驗證了本文所提方法的有效性,該評價方法能有效鑒別饋線自動化動作過程中的拒動、誤動情形,科學評價饋線自動化算法優劣及參數整定的合理性。
1 負荷狀態定義及饋線自動化干擾因素
配電網發生故障后負荷狀態轉換如圖1所示,當某處出現故障后,可通過配電終端上傳的信息, 由配網主站的高級應用算法確定故障位置及故障類型, 并利用遙控功能操作現場開關的分合狀態, 實現故障區域的隔離與非故障區域的恢復送電。考慮DG大規模配置的配電網, 故障時DG需先退出運行, 繼而通過有源配電網的饋線自動化算法, 進行融合DG的配電網故障區域隔離與非故障區域的恢復送電。
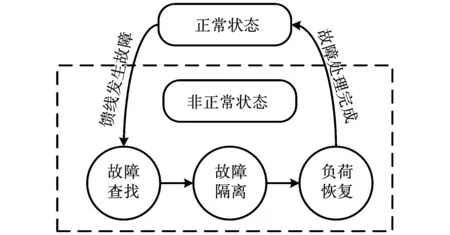
圖1 狀態轉換模型Fig.1 State transition during the feeder automation process
1.1 饋線自動化過程中的負荷狀態定義
以圖2為例進行說明, 正常狀態下, 負荷均為正常供電, ①~⑤之間負荷均可定義為“正常態”。當假定②與③之間發生故障時, 負荷轉化為非正常狀態, 此時饋線出口斷路器和DG的自帶保護均跳閘, 使得①~⑤之間負荷均失電。此時的負荷可分為兩類, 一類為故障區域內的負荷, 如②~③之間的負荷, 處于故障區域內, 無法通過饋線自動化過程恢復供電, 可定義為“故障態”; 另一類為非故障區域的負荷, 如①~②和③~⑤之間的負荷, 處于非故障區域, 但由于②~③之間發生故障而失電, 如配電網絡足夠強壯, 可通過饋線自動化動作實現負荷恢復送電, 因此這兩個區域內負荷可定義為“待恢復態”。

圖2 負荷狀態定義示意圖Fig.2 The sketch of load states definition
以上定義負荷的“正常態”、“故障態”以及“待恢復態”, 伴隨著饋線自動化過程將進行相互轉變, 從這些狀態的遷移中, 可以看出饋線自動化過程是否合理, 在網架強健的配電網中, 終態下所有的“待恢復態”負荷都將轉變為“正常態”。在通信狀態良好并且開關不存在拒動、誤動情況下, 如圖3所示, 僅負荷由“待恢復態”轉變為“正常態”是合理的, 其余狀態遷移均可認為是不合理的。

圖3 狀態遷移合理性示意Fig.3 The sketch of state transition reasonability
1.2 主動配電網饋線自動化動作干擾因素
饋線自動化這一過程能夠實現本身依賴于配電網一次網架的強健以及二次系統的穩定, 信息傳遞對饋線自動化動作尤為重要。一方面, 配電終端故障或受到外界干擾使得傳輸數據有誤, 將會使得主站得到錯誤數據從而導致錯誤的指令下發; 另一方面, 通信網絡的堵塞、延時以及中斷可能造成系統無法正常傳輸數據, 從而影響故障信息上送和命令下發的速度和時序配合的準確性。
此外,主動配電網中DG的接入使得配電網運行方式從傳統的單向潮流轉變為雙向潮流,這對配電網饋線自動化算法及保護整定提出了更高的要求,既要滿足靈敏性要求保證開關可靠動作,同時也要防止參數整定過高導致的開關誤動。影響饋線自動化動作的主要干擾因素可概括為:
1)配電終端功能模塊故障或者通信系統傳輸信號時受到外協擾動, 導致數據傳輸有誤, 使得現場信息與主站中信息不一致。
2)配電終端功能模塊故障或通信系統故障, 導致配電終端與主站失聯。
3)故障隔離階段發生開關拒動, 從而隔離失敗,進一步影響負荷轉供。
4)故障隔離階段發生開關誤動, 導致負荷失電或擴大停電范圍。
5)負荷恢復階段開關拒動, 影響非故障區域負荷恢復供電。
6)負荷恢復階段開關誤動, 導致配電網中形成電磁環網或負荷失電。
以上情況, 會出現故障隔離區域擴大、負荷失電等狀態, 從而將會出現負荷由“待恢復態”轉變為“故障態”等非正常的狀態遷移。但邏輯合理的饋線自動化算法將能夠合理應對這些干擾因素, 盡量減少不合理的狀態遷移, 能夠正確處理故障。
對于饋線自動化算法的理論研究眾多, 但對其正常工況下以及干擾因素作用下的算法可靠性評價仍鮮有研究, 需要針對主動配電網饋線自動化動作的特點, 提出一種定量的評估方法。
2 饋線自動化動作評估體系
2.1 饋線自動化動作結果評價
為方便討論, 本文以如圖4所示的一條n分段m聯絡的饋線進行饋線自動化動作評估體系的論述。圖5為兩套饋線自動化算法對同一配電網絡中故障的負荷供電曲線比較。
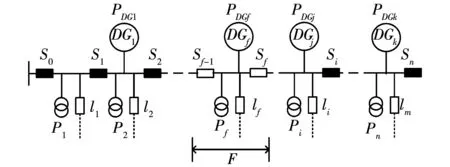
圖4 一條n分段m聯絡饋線示意圖Fig.4 Feeder diagram with n section and m interconnection

圖5 饋線自動化動作過程中負荷供電曲線Fig.5 Load power supply curve during the feeder automation process
饋線自動化是在饋線發生故障時, 將故障區域隔離, 非故障區域恢復供電的過程。擴展到配電網層面, 由于DG的接入使得饋線自動化還增加了DG孤島模式供電的過程。在此基礎上, 本文提出以下3項指標作為饋線自動化動作的結果評價依據。
1)饋線自動化動作結束時間tFLISR
tFLISR指單次故障下, 從故障發生時刻O至饋線自動化動作結束的時間。圖5中, 對于算法①,tFLISR為D點時間, 對于算法②,tFLISR為C點時間。
2)負荷恢復率γfinal
γfinal指饋線自動化動作結束后, 因該動作被恢復的負荷功率值(即由“待恢復態”變為“正常態”的負荷功率值)與未發生故障前饋線上的負荷功率值的比值, 即
(1)
對于算法①和算法②來說, 雖然其tFLISR不同但最終得到的γfinal相同, 均為E(F)點恢復負荷功率值與G點功率值的比值。
3)可再生能源接入率ηfinal
ηfinal指饋線自動化動作結束后, 所有DG向負荷供電的功率值與此時所有DG能夠發出功率值的比值, 即
(2)
此處將DG代指可再生能源。
圖5中, 如認為算法①與算法②的可再生能源接入率相同, 則兩者僅饋線自動化動作結束時間存在差異, 然而算法①中存在著恢復供電負荷減少的情況, 表明存在不合理狀態的遷移。這在饋線自動化動作過程中, 是不被允許的, 但相應的結果評價指標難以展現這一問題, 因此本文提出了饋線自動化動作的過程評價指標。
2.2 饋線自動化動作過程評價
針對饋線自動化動作結果評價的不足, 本文提出以下4項指標作為饋線自動化動作過程評價依據。其中, 饋線自動化過程一般在5 min內結束, 選取1 min和3 min兩個特征時刻作為過程評價的計算點, 而部分DG在孤島劃分后才重新給負荷供電, 因此DG僅考慮3 min這個特征時刻。
4)1 min、3 min負荷恢復率γ1 min、γ3 min
γ1 min、γ3 min指饋線自動化動作1 min和3 min后, 因該動作被恢復的負荷功率值與未發生故障前饋線上的負荷功率值的比值, 即
(3)
(4)
對于算法①(②)來說,γ1 min、γ3 min分別為J(H)點和K(I)點恢復負荷功率值與G點功率值的比值。
5)3 min可再生能源接入率η3 min
η3 min指饋線自動化動作3 min后, 所有DG向負荷供電的功率值與此時所有DG能夠發出功率值的比值, 即
(5)
6)開關變位次數ns+l
饋線自動化的過程主要涉及配電網中分段開關和聯絡開關的調整, 這一過程中開關變位次數從側面反映了饋線自動化過程的速度, 也反映了饋線自動化算法的優劣, 是衡量饋線自動化動作過程的重要標準。
7)不合理狀態遷移次數nft
由1.1節敘述可知, 正常的饋線自動化動作過程只有“待恢復態”向“正常態”的遷移, 其他均為不合理遷移,nft指饋線自動化動作過程中進行的不合理遷移次數。
正常情況下, 應無“待恢復態”負荷最終停電, 但當存在1.2節所述的饋線自動化動作干擾因素時, 需具體問題具體分析。仍以圖2為例, 當②~③之間發生故障, 若無干擾因素, 最終故障隔離時是②和④開關斷開, 則認為③~④內的“待恢復態”負荷最終停電為不合理的; 若③開關發生拒動, 則認為③~④內的“待恢復態”負荷最終停電為合理的。這將在測試用例中進行事先定義, 以區分“待恢復態”負荷最終停電是否合理, 不合理的停電也將導致不合理狀態遷移次數增加。
3 饋線自動化動作評估方法
3.1 評價可靠性評價方法
饋線自動化算法用戶關注的是配電網發生故障時, 其在各種條件下的動作成功率, 即饋線自動化算法是一種離散型軟件。離散型軟件可靠性測試, 是驗證在給定的置信度下, 軟件的可靠性水平能否滿足需求而進行的測試。在測試過程中, 一般將成功率作為需要比較的可靠性參數, 利用事先約定的接受/拒收準則進行判斷。目前比較常用的可靠性驗證方法主要有以下3種:概率比序貫測試方法, 定數測試方法以及無失效測試方法[22]。
3種方案各自的特點如表1所示, 考慮到饋線自動化系統一旦做出錯誤決策, 其可能導致的擴大停電范圍是用戶所不能接受的, 因此, 本文選用無失效測試法進行可靠性測試。
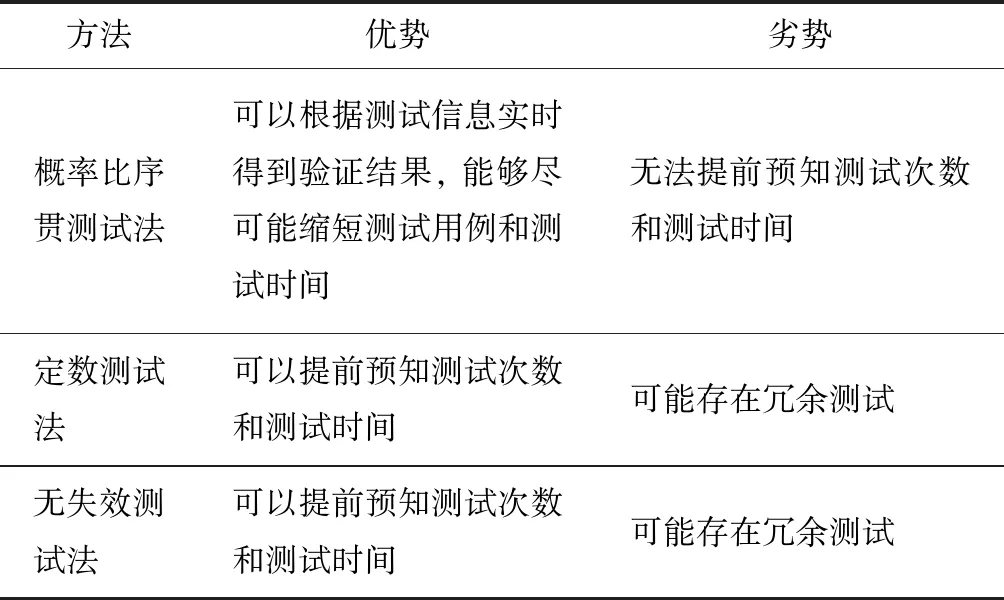
表1 可靠性測試方法對比Tab.1 Comparison of three reliability test methods
無失效測試法的基本思想是:根據合同規定的參數(生產方風險α、使用方風險β、軟件期望達到的成功率S0, 軟件最低可接受的成功率S1)確定測試次數n, 在n次測試過程中, 若失效次數為0, 則接受此產品, 否則拒絕。
假定每次測試都滿足貝努利實驗的獨立性, 則在n次試驗中, 出現s次失效次數的概率服從二項分布。基于此, 用戶接受軟件的概率可用下式表示:
(6)
式中:n為測試次數;s為允許的最大失效次數;S為軟件的可靠度。
生產方風險和使用方風險可用下式描述:
α=Pr{sn>s|S=S0}=1-P(n,s|S0)
(7)
β=Pr{sn≤s|S=S1}=P(n,s|S1)
(8)
式中sn為實際測試過程中, 測試n次出現的失效次數。
在無失效測試法中,s=0, 可確定最小測試次數, 考慮到n為整數, 可對上式進行取整計算, 最終確定最小測試次數為
(9)
式中{ }為取整運算。
基于無失效測試法, 饋線自動化動作在進行給定的nmin次測試過程中, 若失效次數為0, 即整個測試過程中沒有發生故障區域擴大, 則認定接受軟件, 否則拒絕。β、S1和nmin的關系如圖6所示, 可見,β越小,S1越大, 需要的測試樣本數nmin越大。
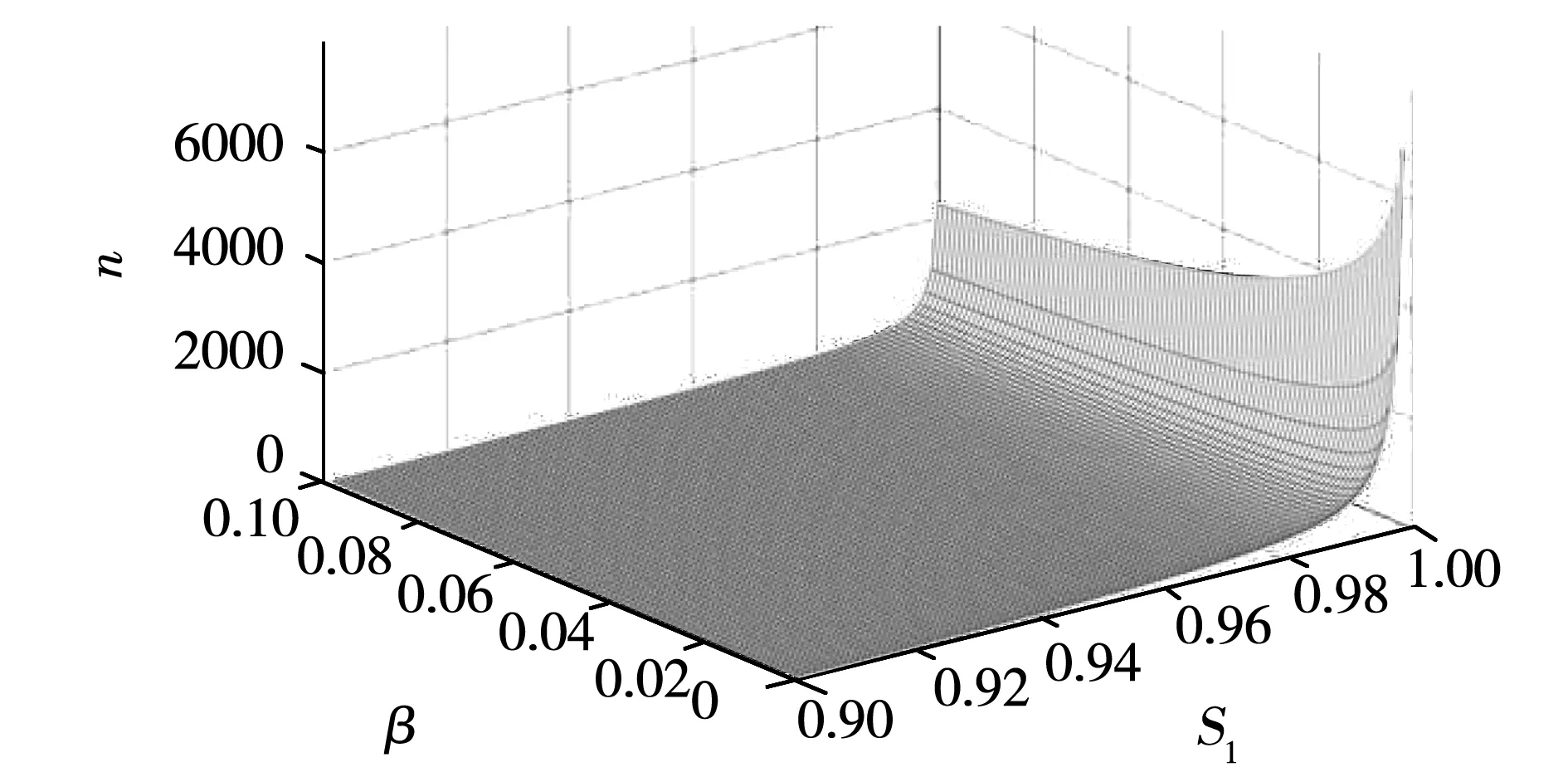
圖6 nmin和β、S1的關系Fig.6 Relationship of nmin and β、S1
3.2 評估流程
對于前文所述的7個饋線自動化動作過程與結果指標, 不合理狀態遷移次數nft作為先決指標, 當nft>0時, 即認為測試直接失效, 停止測試。當nft=0時, 才進行其他指標的計算。
對于具體測試網絡的某一具體案例下, 均能夠計算得到指標1)~6)的具體數值, 對其數值設定具體的分值對應關系, 最終可獲得對饋線自動化動作的分值評價。具體分值設定可根據使用方關注內容而設定, 若使用方希望兼顧各方面指標, 則可設定6項指標最大分值相同; 若使用方更關注負荷的供電可靠性, 則可設定負荷恢復率指標分值高于其他指標。表2為關注負荷恢復率指標情況下各項指標的分值對應示例, 表中的具體評分標準應根據具體案例進行調整。
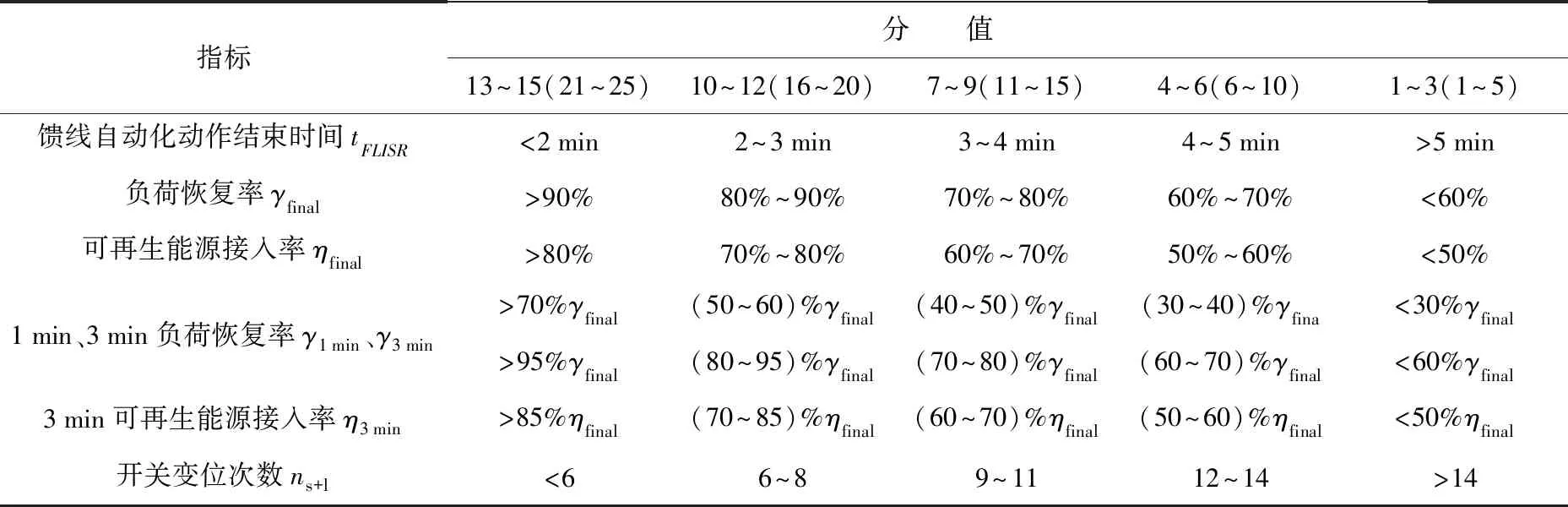
表2 可靠性測試方法對比Tab.2 Comparison of three reliability test methods
測試某一饋線自動化算法時, 具體步驟如下:
步驟1:生產方和使用方根據自身需求及算法特點, 確定β和S1, 并得到nmin, 確定測試案例,nmin個測試案例中應考慮所有干擾因素, 并確定接受算法的最低平均分值Χ。
步驟2:依次調取測試案例進行饋線自動化算法測試, 如不合理狀態遷移次數nft>0, 算法失效, 測試立即終止, 轉至步驟6。
步驟3:算法未失效情況下, 依次記錄下測試案例對應的指標值, 并與形式同表2的分值對應表進行比較, 得出本案例下的指標分值之和χi。
步驟4:平均各次測試結果分數χ1, …,χn, 得到此饋線自動化算法的得分χ。
(10)
步驟5:比較Χ與χ, 若Χ>χ, 則拒絕接受該算法, 反之則接受該饋線自動化算法。
步驟6:結束。
4 算例仿真分析
圖7為電纜雙環網結構并接入分布式電源, 每個站所均配置智能配電終端, 可實現“三遙”, 以圖7所示為測試網絡對此系統內“轉供分析”高級應用算法進行案例測試, 電網數據采用文[23]提出的仿真測試平臺進行實時模擬, 能量管理系統與測試平臺通過104規約進行信息交互。測試后的“轉供分析”高級應用已應用于某主動配電網863示范現場。

圖7 算例拓撲圖Fig.7 Topology diagram of study case
該測試按本文的評估方法進行, 具體步驟如下:
步驟1:確定β=0.05,S1=0.99, 并得到nmin為299。299個測試案例中涵蓋2.2節所述干擾因素并同時考慮二重故障的情況, 形成預置案例庫, 各案例形成分值對應表。確定接受算法的最低平均分值Χ=80。
步驟2:各測試案例下, 不合理狀態遷移次數nft均為0, 算法未失效。
步驟3:依次對所有案例進行測試, 得出各案例下指標數值, 與案例庫中分值對應表進行比較, 得出各案例對應的指標分值之和χi。
步驟5:比較可知χ>Χ, 可認為此饋線自動化算法滿足要求。
整個測試過程表明該饋線自動化算法在考慮各項干擾因素以及二重故障的情況下, 具有正確處理的能力, 盡可能多的恢復“待恢復態”的負荷, 整個測試中未發生不合理狀態遷移。以上驗證結果說明, 該饋線自動化算法無論在正常情況或干擾情況下, 均能較好地適應, 驗證了其可靠性。

圖8 前n次χ平均值Fig.8 Mean of the first n th χ
5 結 論
本文綜合考慮配電網饋線自動化動作過程中負荷狀態的切換, 并計及動作干擾因素的影響, 從饋線自動化動作過程和動作結果兩個角度, 對饋線自動化動作效果進行定量評價:
1)建立了主動配電網饋線自動化動作評估體系, 所提出的7個定量評價指標能夠實現饋線自動化動作過程和動作結果的綜合評估。
2)基于無失效測試法, 改進了配電網饋線自動化動作評估方法, 算例系統驗證了該測試方法的有效性。
相比于傳統的評估方法, 本文所提出的評估方法具有更好的便捷性和全面性, 可為配電網饋線自動化的發展普及提供技術支撐。未來將進一步研究饋線自動化算法優化與效果評估。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50