基于限速預(yù)測(cè)的一點(diǎn)式列車(chē)自動(dòng)駕駛速度規(guī)劃
2021-05-21 05:08:50邢鍵,韓冰
哈爾濱理工大學(xué)學(xué)報(bào) 2021年2期
關(guān)鍵詞:策略
邢 鍵,韓 冰
(1.東北林業(yè)大學(xué) 信息與計(jì)算機(jī)學(xué)院,哈爾濱 150040;2.東北林業(yè)大學(xué) 機(jī)電工程學(xué)院,哈爾濱 150040)
0 引 言
鐵路運(yùn)輸為我國(guó)運(yùn)輸業(yè)的主要方式之一,由于鐵路網(wǎng)絡(luò)的大規(guī)模和客貨運(yùn)能力,機(jī)車(chē)消耗了大量的能源,列車(chē)的自動(dòng)駕駛可以避免司機(jī)因個(gè)人差異、操縱方式等原因造成的安全隱患,同時(shí)在保證列車(chē)的運(yùn)營(yíng)效率的前提,降低運(yùn)輸過(guò)程中的能耗,對(duì)于我國(guó)發(fā)展綠色交通運(yùn)輸方式具有重要意義。
列車(chē)節(jié)能操縱優(yōu)化是一個(gè)最優(yōu)化問(wèn)題,以列車(chē)運(yùn)行能耗為目標(biāo)函數(shù),選擇合適的自變量,求解出滿(mǎn)足相關(guān)約束條件的節(jié)能速度曲線(xiàn)。在對(duì)該問(wèn)題的研究中,國(guó)內(nèi)外的學(xué)者相繼提出了不同的優(yōu)化方法。
Chang等[1]采用遺傳算法以列車(chē)準(zhǔn)時(shí)性、舒適性和列車(chē)能耗為優(yōu)化目標(biāo),建立了列車(chē)操縱優(yōu)化模型,對(duì)列車(chē)的最優(yōu)惰行控制問(wèn)題進(jìn)行了求解; Liang等[2]提出了一種基于罰函數(shù)法的列車(chē)運(yùn)行曲線(xiàn)多目標(biāo)優(yōu)化改進(jìn)的遺傳算法,將罰函數(shù)法加入到適應(yīng)度函數(shù)中,提高了遺傳算法的收斂速度。
Frank等[3]建立了列車(chē)運(yùn)行過(guò)程的非線(xiàn)性模型,把離散動(dòng)態(tài)規(guī)劃應(yīng)用于列車(chē)節(jié)能最優(yōu)運(yùn)行曲線(xiàn)求解;Sager等[4]把混合整數(shù)規(guī)劃方法應(yīng)用于地鐵列車(chē)節(jié)能優(yōu)化問(wèn)題,采用數(shù)值方法求解列車(chē)節(jié)能運(yùn)行策略;Lu等[5]將動(dòng)態(tài)規(guī)劃、遺傳算法和蟻群算法三種算法應(yīng)用于單列車(chē)速度曲線(xiàn)優(yōu)化,并對(duì)結(jié)果進(jìn)行了比較。
Li等[6]考慮重載列車(chē)運(yùn)行過(guò)程中質(zhì)量的動(dòng)態(tài)變化,求解使得列車(chē)準(zhǔn)點(diǎn)、節(jié)能、縱向沖動(dòng)盡可能小的最優(yōu)操縱序列;Gu等[7]結(jié)合離線(xiàn)和車(chē)載優(yōu)化技術(shù),提出了一種列車(chē)節(jié)能控制框架,通過(guò)數(shù)據(jù)挖掘和機(jī)器學(xué)習(xí)建立了基于決策樹(shù)的初步解決方案,車(chē)載系統(tǒng)將列車(chē)參數(shù)輸入決策樹(shù),得到最優(yōu)控制序列;Ghaviha等[8]建立了電動(dòng)車(chē)組最小能耗模型,同時(shí)考慮列車(chē)運(yùn)行輔助能耗,節(jié)能優(yōu)化算法被成功地移植到Bombardier 公司的測(cè)試平臺(tái),為新手司乘人員提供駕駛建議指令。EffatiS等[9]采用迭代動(dòng)態(tài)規(guī)劃求解列車(chē)最小運(yùn)行能耗問(wèn)題,該方法的優(yōu)點(diǎn)是不需要求解貝爾曼方程,能夠保證結(jié)果最優(yōu)性,避免了維度過(guò)大的問(wèn)題。
王鵬玲等[10]根據(jù)司機(jī)優(yōu)化操縱經(jīng)驗(yàn)和典型子區(qū)間思想,將線(xiàn)路劃分為若干區(qū)段,并提前預(yù)制停車(chē)曲線(xiàn)、線(xiàn)路限速,引入自適應(yīng)機(jī)制,應(yīng)用遺傳算法求解列車(chē)節(jié)能最優(yōu)操縱策略;李卓玥等[11]采用了粒子群算法、改進(jìn)蟻群算法和粒子群-蟻群混合算法三種不同的算法設(shè)計(jì)列車(chē)節(jié)能速度曲線(xiàn),并對(duì)算法的仿真結(jié)果進(jìn)行了分析,取得了良好的節(jié)能效果。
馮曉云等[12]總結(jié)了優(yōu)秀司機(jī)的駕駛習(xí)慣和優(yōu)化操縱指導(dǎo)意見(jiàn),設(shè)計(jì)了列車(chē)節(jié)能控制規(guī)則庫(kù),實(shí)現(xiàn)了基于模糊預(yù)測(cè)控制的列車(chē)自動(dòng)駕駛;何慶等[13]進(jìn)一步研究了司機(jī)駕駛經(jīng)驗(yàn)和專(zhuān)家操縱建議,設(shè)計(jì)了模糊專(zhuān)家規(guī)則庫(kù),實(shí)現(xiàn)列車(chē)運(yùn)行曲線(xiàn)的在線(xiàn)計(jì)算。唐海川等[14]將動(dòng)態(tài)規(guī)劃和二分法相結(jié)合,求解高速列車(chē)離線(xiàn)最優(yōu)操縱策略,針對(duì)列車(chē)運(yùn)行晚點(diǎn)問(wèn)題,設(shè)計(jì)在線(xiàn)調(diào)整算法,及時(shí)重新規(guī)劃列車(chē)最優(yōu)運(yùn)行軌跡;余進(jìn)等[15]設(shè)計(jì)了兩級(jí)模糊神經(jīng)網(wǎng)絡(luò),基于離線(xiàn)學(xué)習(xí)的結(jié)果仿真了列車(chē)優(yōu)化操縱曲線(xiàn)。王龍生等[16]將列車(chē)運(yùn)行的安全性和車(chē)鉤間的耦合力作為約束,設(shè)計(jì)了列車(chē)自動(dòng)駕駛預(yù)測(cè)控制算法,通過(guò)多因素的調(diào)整,完善了列車(chē)自動(dòng)駕駛控制器。徐傳芳等[17]針對(duì)列車(chē)運(yùn)行控制中對(duì)目標(biāo)速度和位移的跟蹤控制問(wèn)題,建立了考慮牽引與制動(dòng)轉(zhuǎn)矩產(chǎn)生動(dòng)態(tài)過(guò)程的高速列車(chē)運(yùn)行模型,提出了高速列車(chē)的自適應(yīng)動(dòng)態(tài)面控制算法。
上述方法在列車(chē)節(jié)能操縱優(yōu)化問(wèn)題的求解都得到了廣泛的應(yīng)用,但都存在一定缺點(diǎn)和局限性。采用動(dòng)態(tài)規(guī)劃、遺傳算法、蟻群算法求解最優(yōu)化問(wèn)題時(shí),優(yōu)化的目標(biāo)較多,但是計(jì)算速度相對(duì)較慢,實(shí)時(shí)性能差[18-19]。采用極大值原理求解時(shí),求解速度快,但是求解過(guò)程比較復(fù)雜,而且參數(shù)經(jīng)簡(jiǎn)化后和實(shí)際線(xiàn)路存在較大的差別。
綜上所述,目前存在著鐵路坡道變化與限速約束等問(wèn)題,求解維數(shù)大,計(jì)算過(guò)程復(fù)雜,僅能在理論層面進(jìn)行簡(jiǎn)單坡道或理想坡道的仿真,很難與實(shí)際情況下的復(fù)雜情況作對(duì)比。本文基于坡道區(qū)間化簡(jiǎn)原則和區(qū)間限速規(guī)定,提出了一種化簡(jiǎn)坡道區(qū)間內(nèi)僅需一種狀態(tài)轉(zhuǎn)換點(diǎn)的列車(chē)自動(dòng)駕駛速度規(guī)劃方案,建立了限速預(yù)測(cè)模型來(lái)提高算法效率,選擇改進(jìn)后的遺傳算法搜索最優(yōu)解,得出了列車(chē)節(jié)能操縱運(yùn)行曲線(xiàn),將優(yōu)化的曲線(xiàn)與實(shí)際線(xiàn)路的實(shí)測(cè)數(shù)據(jù)進(jìn)行對(duì)比,驗(yàn)證算法的可行性。
1 構(gòu)建列車(chē)能耗模型
根據(jù)牛頓第二定律,單質(zhì)點(diǎn)列車(chē)運(yùn)動(dòng)方程可描述為
(1)
式中:x,v,t分別為列車(chē)的位置,速度,時(shí)間變量;M,?分別為列車(chē)的質(zhì)量以及質(zhì)量系數(shù),通常取?=0.06;f為最大牽引力;q為最大制動(dòng)力;w0為基本阻力;g為坡道阻力;μf、μb分別為列車(chē)的牽引力施加系數(shù)和制動(dòng)力施加系數(shù),其中,μf∈[0,1],μb∈[0,1]。根據(jù)張小維[20]的研究結(jié)果可得列車(chē)操作工況和牽引力、制動(dòng)力施加系數(shù)的關(guān)系。
運(yùn)動(dòng)方程的邊界條件為
(2)
式中:x0,xs分別為列車(chē)運(yùn)行的始末位置;v(x0)、v(xs)分別為列車(chē)運(yùn)行的始末速度;v(x)、vmax(x)分別為列車(chē)在位置x處的速度及限速;T為列車(chē)的計(jì)劃運(yùn)行時(shí)間。
列車(chē)運(yùn)行過(guò)程中的能耗主要由列車(chē)運(yùn)行能耗和列車(chē)運(yùn)行輔助能耗構(gòu)成,列車(chē)運(yùn)行輔助能耗所占總能耗比重較小,因此,本文重點(diǎn)討論列車(chē)的運(yùn)行能耗。
列車(chē)的運(yùn)動(dòng)能耗主要表現(xiàn)在牽引力做的功,因此列車(chē)節(jié)能優(yōu)化的性能指標(biāo)函數(shù)為
(3)
其中η為牽引力施加常數(shù)系數(shù)。
2 構(gòu)建節(jié)能操縱模型
2.1 坡道簡(jiǎn)化
具體路段劃分步驟如下:
1)合并相同類(lèi)型的坡道
根據(jù)坡道大小,將符合一定規(guī)則的同類(lèi)型坡道進(jìn)行合并。劃分標(biāo)準(zhǔn)如下:
線(xiàn)路總長(zhǎng)為X,列車(chē)計(jì)劃運(yùn)行時(shí)間為T(mén),定義理想巡航速度為
(4)
在當(dāng)前坡度值為i的坡道上,若存在合適的μf∈[0,1]滿(mǎn)足
μff(VX)=wo(VX)-i
(5)
則稱(chēng)該坡道為平緩坡,其中:μff(v)為單位牽引力;wo(v)為單位基本阻力。
若滿(mǎn)足
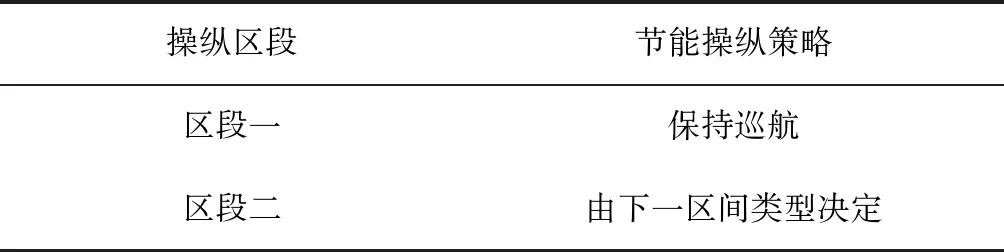
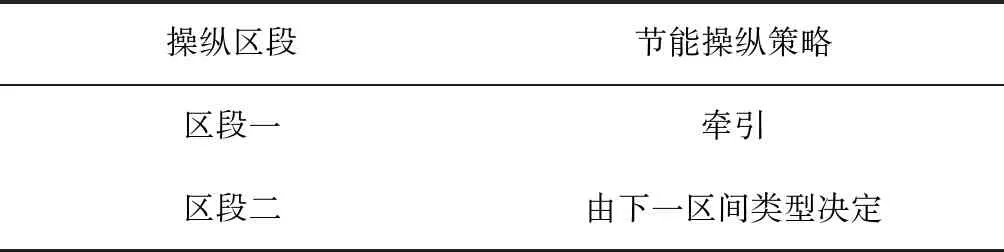
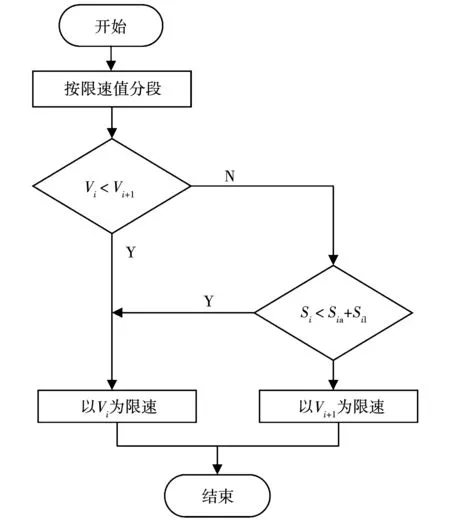
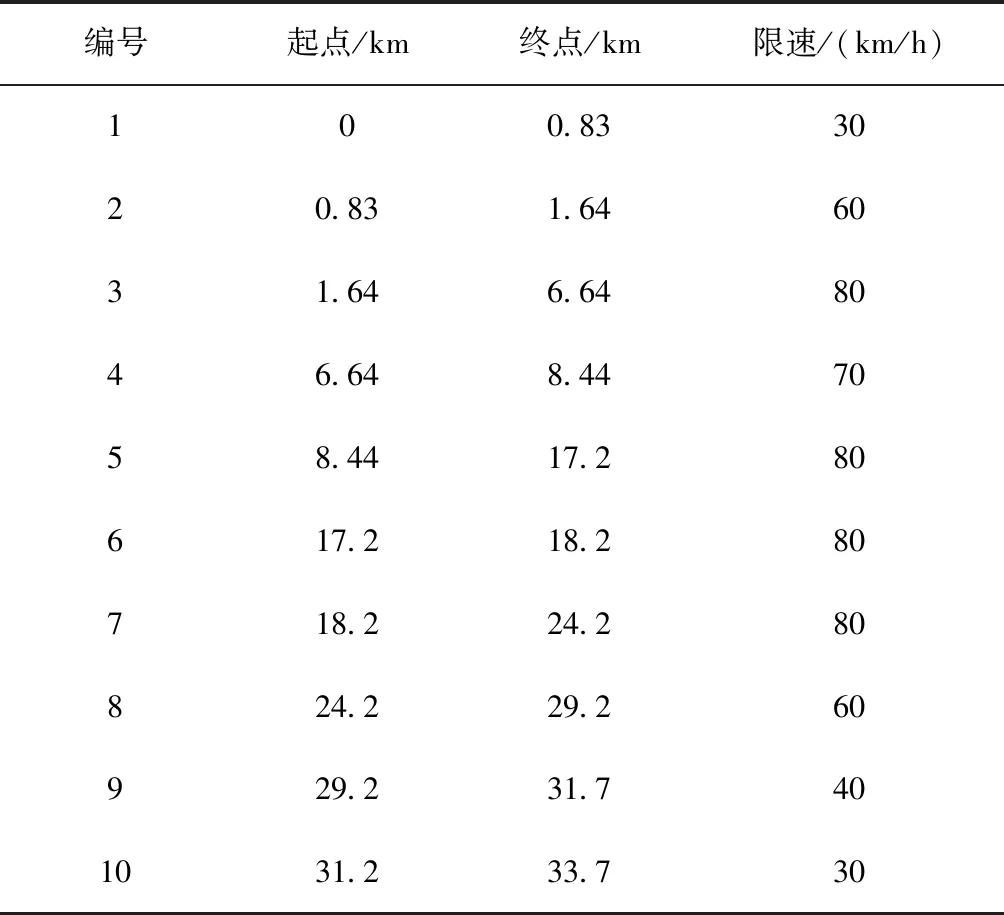
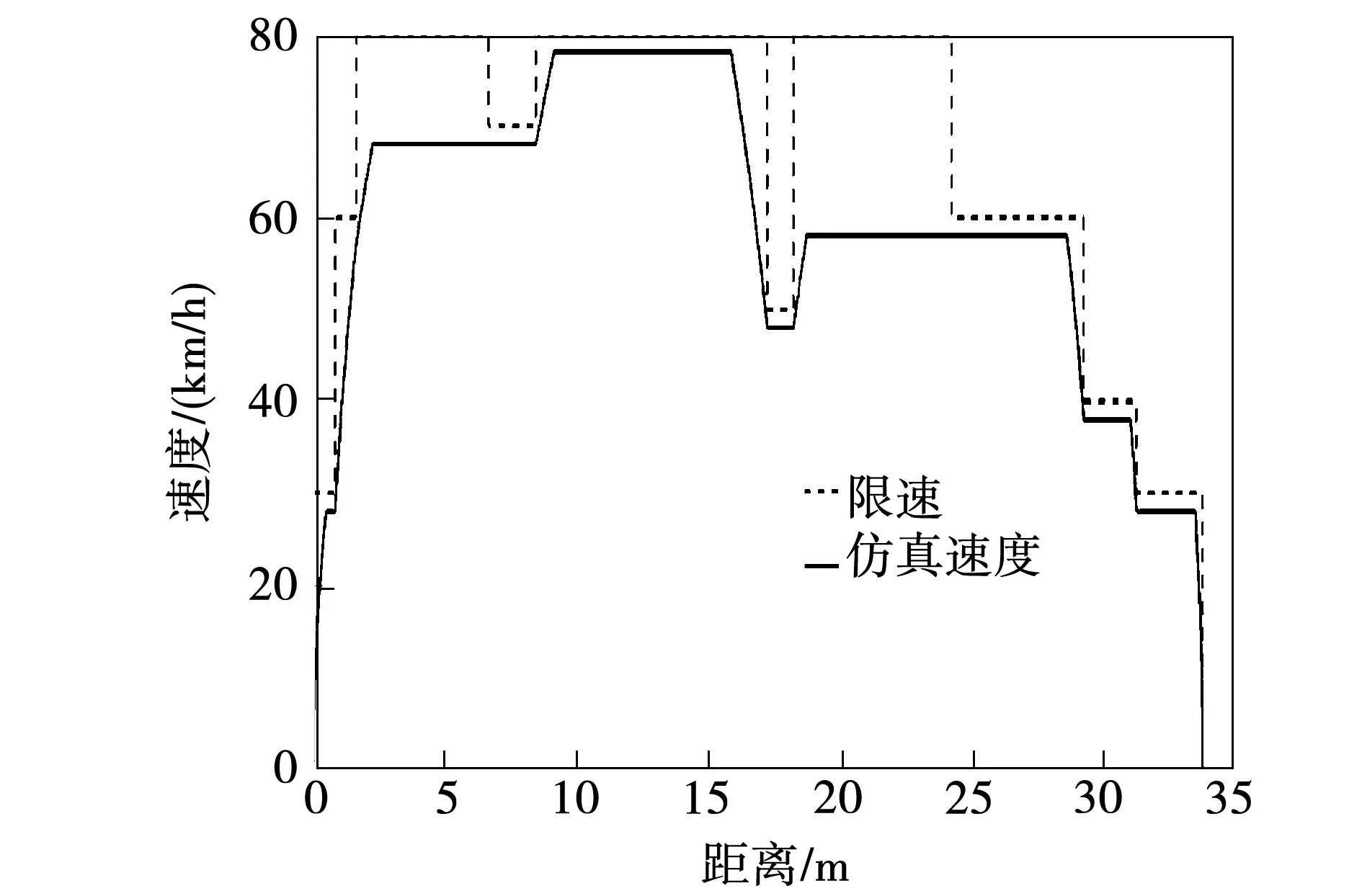
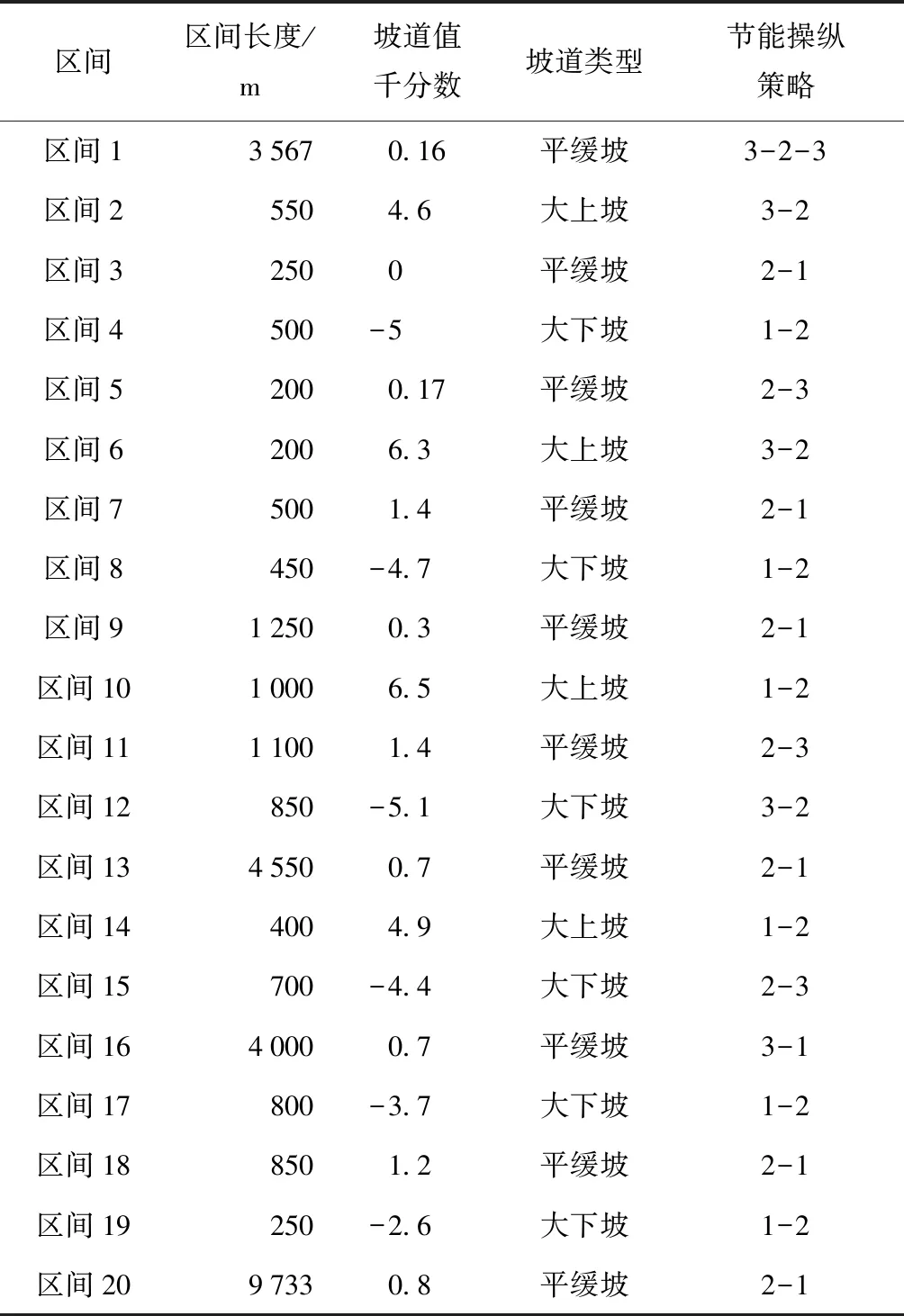
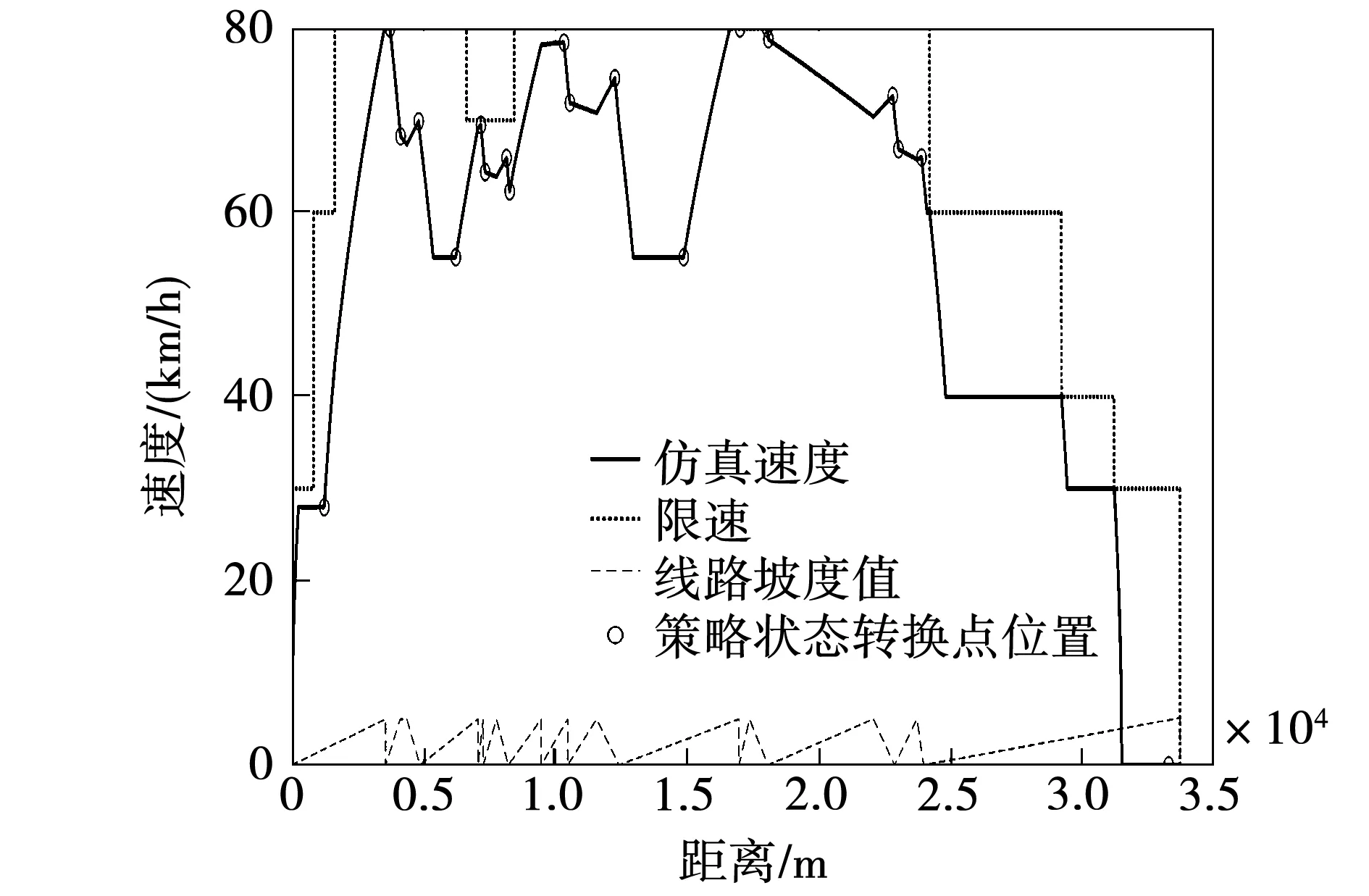
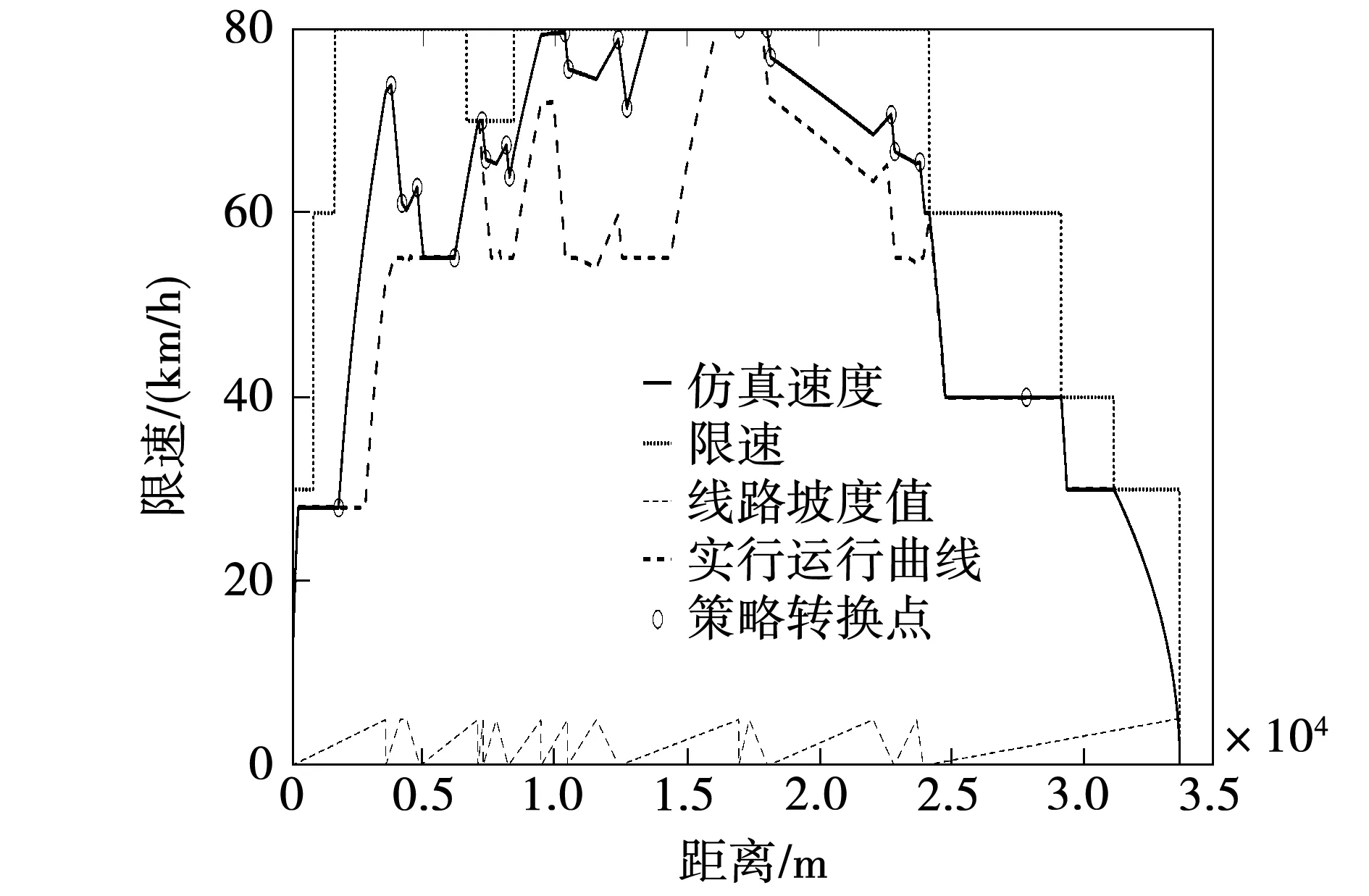
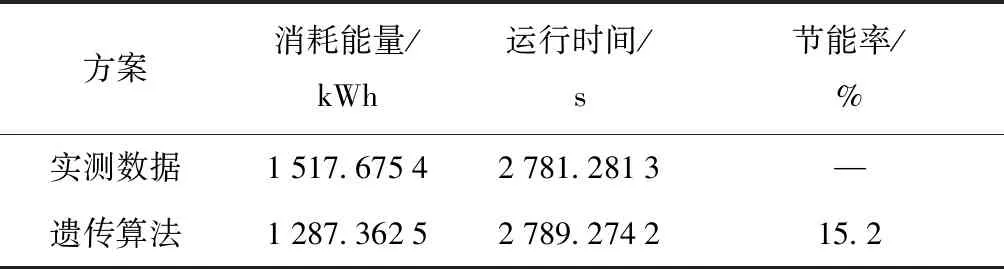
f(VX) (6) 則稱(chēng)該坡道為大上坡。 若滿(mǎn)足 wo(VX) (7) 則稱(chēng)該坡道為大下坡。 將合并前的坡道表示為 S0=[S01,S02,…,S0i,…,S0(n-1),S0n] (8) 其中:S0i表示合并前第i個(gè)坡道的起點(diǎn)位置,合并前線(xiàn)路上共n個(gè)坡道。 按照上述坡道劃分規(guī)則,可以將合并后的區(qū)間表示為 S1=[S11,S12,…,S1k,…,S1(n-1),S1n] (9) 其中:S1k表示合并后第k個(gè)區(qū)間的起點(diǎn)位置,合并后線(xiàn)路上共m個(gè)區(qū)間。 2)基于坡道一點(diǎn)式操縱策略區(qū)段劃分 列車(chē)在運(yùn)行中的操縱策略選擇,不僅與當(dāng)前位置所處的坡道類(lèi)型有關(guān),也與其相鄰的前后兩個(gè)區(qū)間的坡道類(lèi)型有關(guān)。為便于描述,將列車(chē)操縱策略分為三類(lèi):全力牽引、惰行、保持巡航,分別設(shè)置各區(qū)間上的操縱策略。 ①起始過(guò)程操縱策略(3個(gè)點(diǎn)) 起始區(qū)間內(nèi):因起點(diǎn)為起始牽引點(diǎn),所以將起點(diǎn)看作一個(gè)策略轉(zhuǎn)換點(diǎn),牽引階段結(jié)束后,在第一段區(qū)間的操縱策略選擇應(yīng)以本區(qū)間的坡道類(lèi)型和下一區(qū)間的坡道類(lèi)型決定的,故在第一區(qū)段存在三個(gè)操縱策略轉(zhuǎn)換點(diǎn)。 對(duì)于起始區(qū)間,切換點(diǎn)位置應(yīng)滿(mǎn)足式(10)約束: (10) 按照選取的3個(gè)策略轉(zhuǎn)換點(diǎn)的位置,可以將起始區(qū)間按操縱策略的不同,分成3個(gè)區(qū)段。各區(qū)段對(duì)應(yīng)操縱策略如表1所示。 表1 起始區(qū)間內(nèi)各區(qū)段節(jié)能操縱策略Tab.1 Energy-saving operation strategy for each section in the starting interval ②運(yùn)行過(guò)程操縱策略(1個(gè)點(diǎn)) 運(yùn)行區(qū)間內(nèi)操縱策略均由該區(qū)間的坡道類(lèi)型和下一區(qū)間的坡道類(lèi)型決定,故在運(yùn)行過(guò)程區(qū)間內(nèi)存在一個(gè)策略轉(zhuǎn)化點(diǎn)。 對(duì)于第i(i≠1)個(gè)運(yùn)行過(guò)程區(qū)間,切換點(diǎn)位置應(yīng)滿(mǎn)足式(11)約束: S1i≤Xi1≤S1(i+1) (11) 按照選取的一個(gè)策略轉(zhuǎn)換點(diǎn)的位置,可以將運(yùn)行過(guò)程區(qū)間按操縱策略的不同分成兩個(gè)區(qū)段。各區(qū)段對(duì)應(yīng)的操縱策略如表2、3、4所示。 當(dāng)坡道為平緩坡類(lèi)型時(shí),運(yùn)行過(guò)程區(qū)間內(nèi)各區(qū)段對(duì)應(yīng)操縱策略如下: 表2 平緩坡節(jié)能操縱策略Tab.2 Energy-saving operation strategy for gentle slope 當(dāng)坡道為大上坡類(lèi)型時(shí),運(yùn)行過(guò)程區(qū)間內(nèi)各區(qū)段對(duì)應(yīng)操縱策略如下: 表3 大上坡節(jié)能操縱策略Tab.3 Energy-saving operation strategy for large upslope 當(dāng)坡道為大下坡類(lèi)型時(shí),運(yùn)行過(guò)程區(qū)間內(nèi)各區(qū)段對(duì)應(yīng)操縱策略如下: 表4 大下坡節(jié)能操縱策略Tab.4 Energy-saving operation strategy for large downslope ③終止過(guò)程操縱策略(一個(gè)點(diǎn)) 終止過(guò)程區(qū)間結(jié)束時(shí)應(yīng)采取制動(dòng)策略,終止區(qū)間內(nèi)制動(dòng)前的操縱策略由該區(qū)間的坡道類(lèi)型決定,故在運(yùn)行過(guò)程區(qū)間內(nèi)存在一個(gè)策略轉(zhuǎn)化點(diǎn)。 對(duì)于終止過(guò)程區(qū)間,切換點(diǎn)位置應(yīng)滿(mǎn)足式(11)的約束。 按照選取的一個(gè)策略轉(zhuǎn)換點(diǎn)的位置,可以將終止過(guò)程區(qū)間按操縱策略的不同,分成兩個(gè)區(qū)段。由于列車(chē)運(yùn)行終止需停車(chē),為節(jié)約能量采取惰行的操縱策略,終止過(guò)程區(qū)間中各區(qū)段對(duì)應(yīng)的操縱策略如表5所示。 表5 終止過(guò)程區(qū)間內(nèi)各區(qū)段節(jié)能操縱策略Tab.5 Energy-saving operation strategy of each section in the termination process interval 故全路段分為m個(gè)區(qū)間,m個(gè)區(qū)間上共有m+2個(gè)轉(zhuǎn)換點(diǎn)。相比于張小維[20]于2018年提出的線(xiàn)路分成m個(gè)區(qū)間上有2m+1個(gè)轉(zhuǎn)換點(diǎn),計(jì)算的策略轉(zhuǎn)換點(diǎn)減少了近一倍,使算法的效率大大提高,在節(jié)能策略的選擇上,本文提出的操縱策略改變的次數(shù)更少,更利于操縱。 在對(duì)列車(chē)節(jié)能操縱策略求解前,本文提出了列車(chē)限速預(yù)測(cè)輔助模型,由此確定列車(chē)在整個(gè)區(qū)段運(yùn)行時(shí)的速度約束,從而避免由區(qū)段坡度決定的策略與區(qū)段限速的矛盾。 1)模型建立過(guò)程 首先,根據(jù)限速值的不同,將路段劃分成不同的i段,從起點(diǎn)開(kāi)始,逐段比較,當(dāng)前限速段的限速值為Vi,與下一限速段的限速值為Vi+1。 若Vi 判斷依據(jù):利用計(jì)算機(jī)模擬列車(chē)運(yùn)行,記當(dāng)前第i段限速段距離為Si,計(jì)算列車(chē)加速到接近限速的加速距離為Sia,列車(chē)減速到下一段限速的減速距離為Sil。 若Si>Sia+Sil,則可以以當(dāng)前限速為目標(biāo)速度,否則以下一段限速為當(dāng)前段的限速,依次進(jìn)行迭代。 模型建立過(guò)程的流程圖如圖1所示。 圖1 模型建立過(guò)程流程圖Fig.1 Flow chart of the model building process 2)仿真算例 列車(chē)情況: 機(jī)車(chē)型號(hào)HXD3,機(jī)車(chē)重量138 t,車(chē)輛自重加載重共90 t,車(chē)輛節(jié)數(shù)40。 線(xiàn)路條件:如表6所示。 坡度默認(rèn)為0,只考慮限速情況。 表6 線(xiàn)路限速情況Tab.6 Line speed limit 3)仿真結(jié)果 圖2 限速預(yù)測(cè)模型仿真圖Fig.2 Simulation diagram of speed limit prediction model 本文在求解狀態(tài)切換點(diǎn)位置的方法上選擇了改進(jìn)后的遺傳算法,對(duì)適應(yīng)度函數(shù)做了改進(jìn),采用時(shí)間和能量作為聯(lián)合約束,加快了收斂速度,提高了算法效率。 第i個(gè)個(gè)體代表的節(jié)能操縱方案所用的能量為Ei,第i個(gè)個(gè)體代表的節(jié)能操縱方案所用的時(shí)間為T(mén)si,T為計(jì)劃運(yùn)行時(shí)間,ΔTi為實(shí)際時(shí)間與計(jì)劃運(yùn)行時(shí)間的差值,則有: ΔTi=Tsi-T (12) 以時(shí)間和能量共同作為目標(biāo)設(shè)計(jì)適應(yīng)度函數(shù)為: (13) (14) (15) 式中:α為運(yùn)行時(shí)間權(quán)重;β為列車(chē)能耗權(quán)重;φ、φ為懲罰因子。 本文仿真過(guò)程α和β取值均為0.5,即按照時(shí)間和能耗權(quán)重相同來(lái)規(guī)劃列車(chē)速度曲線(xiàn),φ、φ的取值均為-1 000,懲罰因子的作用為:當(dāng)列車(chē)行駛速度超出路段限速,以及列車(chē)加速度變化超過(guò)規(guī)定值時(shí),該個(gè)體的適應(yīng)度值不符合實(shí)際約束,可篩選掉一部分解,提高運(yùn)算效率。 在實(shí)際應(yīng)用中α+β=1,α和β的取值根據(jù)計(jì)算原則而定,如更注重列車(chē)運(yùn)行時(shí)間的節(jié)時(shí)運(yùn)行或注重能耗的節(jié)能運(yùn)行,可通過(guò)調(diào)節(jié)權(quán)重來(lái)設(shè)置。 遺傳算法的算法步驟如下: 步驟1:染色體采用實(shí)數(shù)編碼方式,將列車(chē)在所有區(qū)間的節(jié)能策略轉(zhuǎn)換點(diǎn)的位置作為一個(gè)染色體,隨機(jī)產(chǎn)生初始種群,種群數(shù)目為50; 步驟2:計(jì)算個(gè)體的適應(yīng)度,并判斷是否符合優(yōu)化準(zhǔn)則,若符合,輸出最佳個(gè)體及其代表的最優(yōu)解,并結(jié)束運(yùn)算,否則轉(zhuǎn)向步驟3; 步驟3:依據(jù)適應(yīng)度選擇再生個(gè)體,選擇的方法為輪盤(pán)賭選擇法;個(gè)體i被選擇的概率pi為: (16) 式中:fi為個(gè)體i的適應(yīng)度。 步驟4:通過(guò)交叉生成新的個(gè)體,交叉概率0.95; 步驟5:通過(guò)變異生成新的個(gè)體,變異概率0.04; 步驟6:由交叉和變異產(chǎn)生新一代的種群,返回步驟2; 步驟7:迭代次數(shù)為1 000次,輸出最優(yōu)結(jié)果。 本文在坡道化簡(jiǎn)和改進(jìn)后的遺傳算法的基礎(chǔ)上,選用濱洲線(xiàn)的部分路段中33.7 km進(jìn)行仿真運(yùn)算,該線(xiàn)路既有較大的坡度起伏,又有相對(duì)復(fù)雜的限速條件,具有很強(qiáng)的代表性,可以更真實(shí)地驗(yàn)證遺傳算法優(yōu)化列車(chē)自動(dòng)駕駛曲線(xiàn)的效果 1)列車(chē)參數(shù) 本文仿真選用的機(jī)車(chē)型號(hào)為25 t軸重的HXD3型機(jī)車(chē),機(jī)車(chē)重量138 t,車(chē)輛為C70型號(hào),共40節(jié),自重取20 t,滿(mǎn)載貨物取70 t。 2)線(xiàn)路條件。 全段線(xiàn)路限速情況如表6所示。按照坡道化簡(jiǎn)規(guī)則以及上述的節(jié)能操縱策略,各區(qū)間的節(jié)能操縱策略如表7所示。其中,3代表全力牽引,2代表保持巡航,1代表惰行。 表7 區(qū)間坡道信息與操縱策略Tab.7 Interval ramp information and manipulation strategy 3)遺傳算法設(shè)計(jì) 對(duì)于本文采用的路段條件,共有20個(gè)狀態(tài)轉(zhuǎn)換點(diǎn),故染色體長(zhǎng)度為20,種群大小為50,最大進(jìn)化代數(shù)為1 000,交叉概率為0.4,變異概率為0.04,站間規(guī)定運(yùn)行時(shí)間2 800 s。 仿真所用計(jì)算機(jī)處理器為Intel ?Core(TM) i5-5200U CPU @ 2.20 GHz,內(nèi)存為4 GB,64位WIN10操作系統(tǒng),MATLAB版本為R2018b,程序運(yùn)行時(shí)間為150 s。 通過(guò)遺傳算法結(jié)合限速預(yù)測(cè)模型進(jìn)行不斷優(yōu)化,迭代次數(shù)1 000次時(shí)的速度規(guī)劃曲線(xiàn)圖分別如圖3所示。 圖3 遺傳算法迭代1000次的列車(chē)速度規(guī)劃曲線(xiàn)Fig.3 Speed strategy curves solved by GA with iteration 100 generation 由圖3可知,遺傳算法迭代1 000次時(shí),列車(chē)運(yùn)行時(shí)間為2 790 s,滿(mǎn)足站間運(yùn)行時(shí)間,同時(shí)滿(mǎn)足站間限速規(guī)定,列車(chē)可加速至最高速度,并按照站間限速和坡道原則切換操縱策略,速度變化趨勢(shì)與遺傳算法設(shè)計(jì)原則相符并滿(mǎn)足實(shí)際需求,可以很好的仿真出列車(chē)節(jié)能操縱曲線(xiàn)。 為進(jìn)一步驗(yàn)證本文算法的節(jié)能效果,本文以濱洲線(xiàn)內(nèi)某段為實(shí)驗(yàn)線(xiàn)路,實(shí)驗(yàn)列車(chē)由1節(jié)HXD3C型大功率機(jī)車(chē)牽引40節(jié)C70重車(chē),線(xiàn)路全長(zhǎng)33.7 km,用時(shí)47 min。 WT=W1-W0 (17) (18) 導(dǎo)出實(shí)驗(yàn)車(chē)次的列車(chē)運(yùn)行過(guò)程數(shù)據(jù)記錄,包括列車(chē)運(yùn)行曲線(xiàn)、工況、減壓量等。 基于上文描述的坡道化簡(jiǎn)理論和改進(jìn)后的遺傳算法,通過(guò)仿真得到了與實(shí)際路段相對(duì)應(yīng)的運(yùn)行速度曲線(xiàn),如圖4所示。 由圖4可知,通過(guò)兩種情況下列車(chē)速度曲線(xiàn)對(duì)比可知,在列車(chē)運(yùn)行的出進(jìn)站階段,兩種方案下的速度曲線(xiàn)變化不大,在行駛途中,遺傳算法根據(jù)全局的坡道信息和限速情況,計(jì)算出滿(mǎn)足需求的各區(qū)段狀態(tài)轉(zhuǎn)化點(diǎn)的位置,從而規(guī)劃運(yùn)行速度。而司機(jī)駕駛的方案中,由于個(gè)人操作水平和經(jīng)驗(yàn)的差異,在行駛途中可能會(huì)造成更大能耗。 圖4 列車(chē)自動(dòng)駕駛速度規(guī)劃曲線(xiàn)與實(shí)際曲線(xiàn)對(duì)比Fig.4 Comparison of train automatic driving speed planning curve and actual curve 表8 基于改進(jìn)的遺傳算法的仿真結(jié)果與實(shí)測(cè)數(shù)據(jù)對(duì)比Tab.8 Comparison of measured data and simulation results based on improved genetic algorithm 由表8可知,在時(shí)間方面,采用改進(jìn)后的遺傳算法規(guī)劃得到的運(yùn)行時(shí)間為2 789 s,滿(mǎn)足規(guī)定時(shí)間;在能耗方面,采用改進(jìn)后的遺傳算法規(guī)劃得到的能耗為1 287 kWh,相比實(shí)際運(yùn)行節(jié)能15.2%。 已有方法與經(jīng)典遺傳算法相比,首先結(jié)合坡道化簡(jiǎn)規(guī)則,減低求解維度,提出的融合限速的操縱策略,提高了算法搜索效率。在此基礎(chǔ)上,改進(jìn)后的適應(yīng)度函數(shù)在調(diào)節(jié)權(quán)重時(shí),所需運(yùn)算時(shí)間較短,避免了計(jì)算的復(fù)雜性,適用性強(qiáng),同時(shí)改進(jìn)后的適應(yīng)度函數(shù)引入了懲罰因子,篩選掉大量不符合實(shí)際條件的解,提高了種群的成活率,也避免陷入局部最優(yōu)解,更好的搜索到滿(mǎn)足要求的解。因此,新方法在運(yùn)算速率和搜索結(jié)果的有效性方面均優(yōu)于經(jīng)典方法。 1)本文提出了坡道化簡(jiǎn)原則,將復(fù)雜類(lèi)型的坡道整合化簡(jiǎn),降低了求解維度,建立了只需一種狀態(tài)轉(zhuǎn)換點(diǎn)的列車(chē)限速預(yù)測(cè)模型,避免由區(qū)段坡度決定的策略與區(qū)段限速的矛盾。 2)應(yīng)用了對(duì)適應(yīng)度函數(shù)進(jìn)行改進(jìn)的遺傳算法,提高了種群的生存率,提升了算法運(yùn)行效率和搜索的準(zhǔn)確度。 3)通過(guò)現(xiàn)場(chǎng)實(shí)驗(yàn)和算法仿真結(jié)果的對(duì)比,該方法時(shí)間滿(mǎn)足規(guī)定的運(yùn)行時(shí)間,能耗與實(shí)際運(yùn)行的能耗相比節(jié)約了15.2%。程序運(yùn)行時(shí)間較短,為貨運(yùn)列車(chē)自動(dòng)駕駛實(shí)際運(yùn)營(yíng)提供了理論基礎(chǔ)。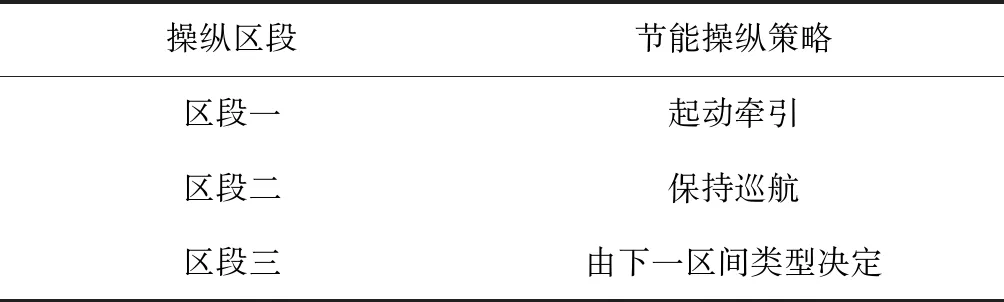

2.2 融合限速的操縱策略輔助
3 基于改進(jìn)遺傳算法的運(yùn)行策略轉(zhuǎn)化點(diǎn)求解
4 仿真求解
5 現(xiàn)場(chǎng)實(shí)驗(yàn)
5.1 實(shí)驗(yàn)線(xiàn)路
5.2 數(shù)據(jù)采集

5.3 對(duì)比仿真研究
6 結(jié) 論
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:42中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10小學(xué)生作文(低年級(jí)適用)(2018年9期)2018-10-08 02:29:48中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:10數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14幸福(2017年18期)2018-01-03 06:34:53中國(guó)衛(wèi)生(2016年8期)2016-11-12 13:26:50