基于云平臺計算大腦鐮旁病變的手術定位研究
2021-05-12 09:25:54李濱李潮激楊利軍楊亮范振增
臨床神經外科雜志 2021年2期
關鍵詞:手術
李濱,李潮激,楊利軍,楊亮,范振增
顱內大腦鐮旁占位病變的定位是神經外科手術成功的關鍵步驟[1]。臨床醫生常常僅依靠原始的CT或MRI圖像進行粗略測量定位,或在頭顱體表放置標記物再次進行掃描定位;這不但增加患者的費用,且往往會產生誤差。為了全部包括腫瘤的范圍,經常不得不擴大切口,給患者帶來了負面影響。目前精確的靶點定位方法主要是立體定向儀定位[2]和神經導航[3],但上述方法均需要使用價值昂貴的儀器且操作較為繁瑣,不能普及應用。為此,本研究開發了額頂中線定位法[4-5],提供了一種定位顱內大腦鐮旁占位病變的準確、簡易方法。本定位方法的主要功能是轉換CT或MRI坐標數據,確定顱內靶點的頭皮對應位置。本軟件系統基于云平臺部署,在瀏覽器內使用;用戶登錄后,可以上傳查看案例,對案例可以進行3D建模,手工選點,自動計算定位結果。本方法簡便準確,可用于神經外科手術頭皮投影定位,指導手術切口和顱內穿刺點的選擇。
本軟件主要實現了兩種定位法:顳側定位法和額頂中線定位法,根據靶點位置可以靈活選擇具體的定位方法。顳側定位法主要適用于定位顳側附近的靶點,額頂中線適合定位顱頂中線附近的靶點;兩種定位法使用共同的基準面,即兩外耳門和兩外眥點確定的平面。顳側定位法已有相關研究報道[6-9];而額頂中線定位法是新坐標系,以眉心為原點(亦外眥連線中點),外眥連線向左外眥為x軸方向,平行基準面向前為y,垂直于基準面向上為z。基本做法是調取患者頭顱掃描數據,重建三維立體、水平位、矢狀位和冠狀位等四種圖像,從中記錄雙外耳門、雙外眥,前后腦鐮及靶點等部位的原始三維坐標值。雙外耳門及雙外眥構成一平面,將眉間作為0點,形成新坐標系。將原始三維坐標值經坐標轉換公式移到新坐標系中,在新坐標系沿矢狀縫向額頂畫曲線或矢狀縫旁開畫曲線,曲線可以看成無數點組成,這些點都有坐標值,這樣就能計算出曲線長度,繼而可以推算出顱內病變相對應的垂直頭皮點及病變深度。本定位方法不需要患者再次重新CT或MRI掃描,整體的誤差小,精度高;導入CT或MRI的DICOM文件后只需數分鐘操作就能得到靶點的頭皮對應點。現報告如下。
1 操作方法
1.1 數學模型的建立 顱內靶點定位系統的基本操作流程如下:準備DCM文件,進行3D建模。創建水平位、矢狀位和冠狀位等3個視圖加3D視圖。3D渲染有助于了解整個頭顱的結構。最終的選點操作是在3個視圖中完成。選好的點進行坐標變化,并得到切面圖;為了計算切面方便,新坐標系中的坐標以像素點為單位。在兩個切面圖中確定輪廓線,算出兩者長度;并匯總計算結果。標記后的切面圖可以打印出來供臨床參考。為了手工測算核對方便,切面圖上帶比例尺。
DCM序列與工作集:每個病例有自己的DCM目錄,目錄下有一個由自動工具dcm2png生成的dcmlist.json文件,文件含有該目錄下所有DCM圖片的信息。該工具自動掃描目錄中的dcm文件,將dcm轉成PNG文件,并將dcm信息寫入dcmlist.json。每張DCM圖片都有一個序列號(Series Number)和一個實例號(Instance Number)。同一序列號的DCM圖片一般是同一角度,如水平截面。但是同一序列的圖片有時并不能全部用來進行3D重建。需要根據實例號排序,手工指定一定范圍內的圖片作為符合條件的工作集。同一工作集的DCM圖片必須滿足:(1)水平截面圖;(2)尺寸一致;(3)圖片左上點的x和y值必須很接近;(4)橫向和縱向的pixel Spacing必須一致;(5)各層z遞增或者遞減,且間距均勻;(6)創建工作集后,可以選擇一個工作集進行3D重建。所有的后續操作均發生該工作集內。
1.2 各點的選擇 選擇一個工作集進行3D重建后,需要從3個角度的截面中(水平位,矢狀位,冠狀位)找到7個位置點:左外眥、右外眥、左外耳孔、右外耳孔、前腦鐮、后腦鐮及靶點。前4個點有比較明顯標志,在影像中容易選取,體表也容易找到對應點;此4點確立了新坐標系的基準面。左外眥、右外眥的中點為原點(圖1)。為了校正,要求另外需要提供前腦鐮和后腦鐮的點,用來校正原點位置,因原點位置決定了過額頂中線切面的準確性。手術定位的靶點(病變位置)需要分別選擇腫瘤的前后、上下邊界分別計算(圖2)。
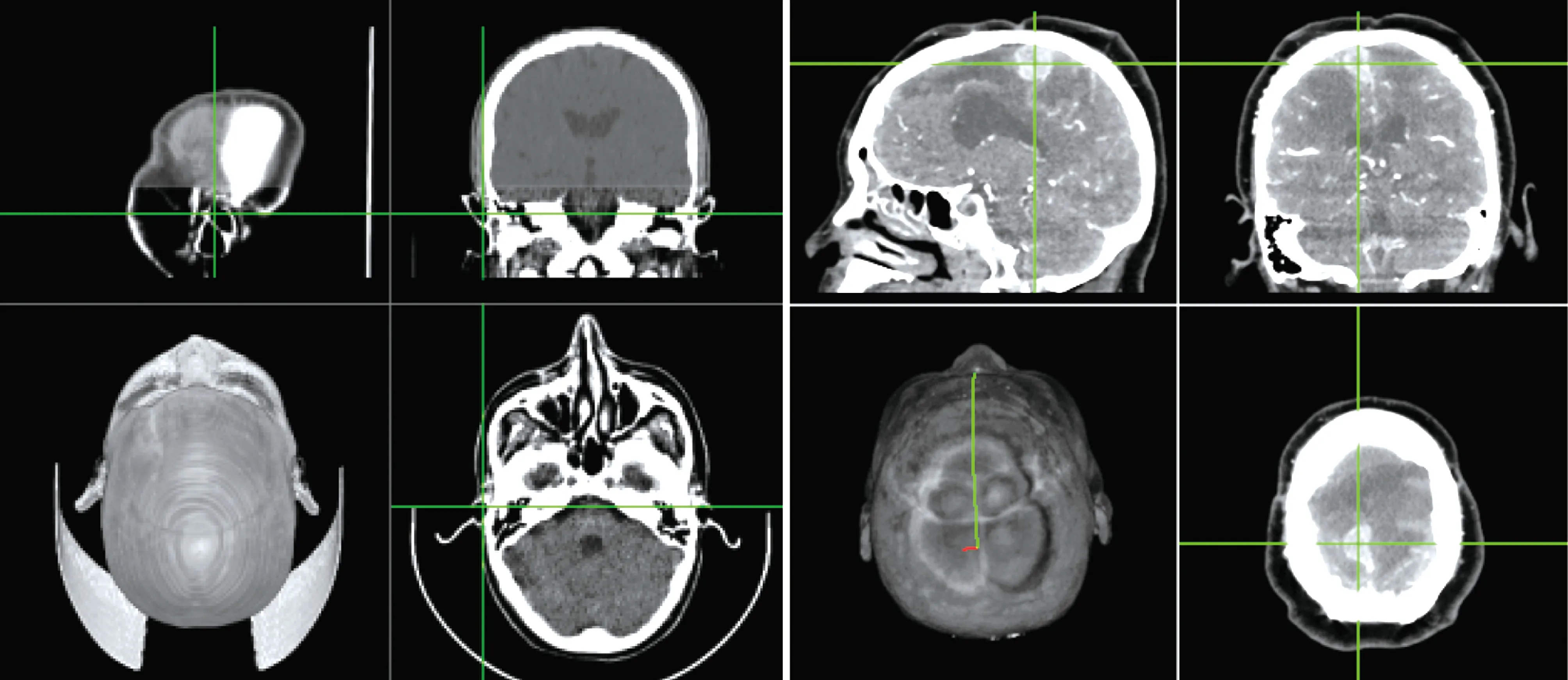
圖1 原點選擇示意圖(右外耳門) 圖2 靶點計算示意圖
1.3 坐標轉換 DCM文件中含有每層掃描圖像的數據,并有該層掃描圖像的原始坐標信息,這些坐標信息與設備相關。需要將原始坐標信息轉為臨床上有意義的坐標系統,以便于理解和計算,也便于計算出臨床需要的切面。掃描層切面的像素點有相應的物理點距。為了計算的準確性,要求x點距和y點距(pixel Spacing)須一致。另外,各層切面的z坐標值必須間隔均勻。新坐標系以眉間為原點。因眉間在CT掃描圖像中很難確定,本研究的做法是找出兩個外眥點,取其中點。兩眼連線為x軸。外眥和外耳孔確定了z=0這個平面。x=0的面即為過額頂中線的矢狀位切面。假設靶點坐標為(tx,ty,tz),則y=ty為過靶點的冠狀位切面。矢狀位切面和頭顱表面的交界線確定了靶點的第一段路徑,冠狀位切面與頭顱表面的交界線確定了第二段路徑。深度為頭顱表面上第二段路徑的終點與靶點的距離。為了計算坐標變換矩陣,需要對原始坐標系進行簡化;令各層掃描圖像的左上角x,y為0,最底層的掃描圖像z為0,其上各層z遞增。原坐標系和新坐標系均以像素點為單位。


從新坐標系到原坐標系的變換矩陣的算法為M的逆:
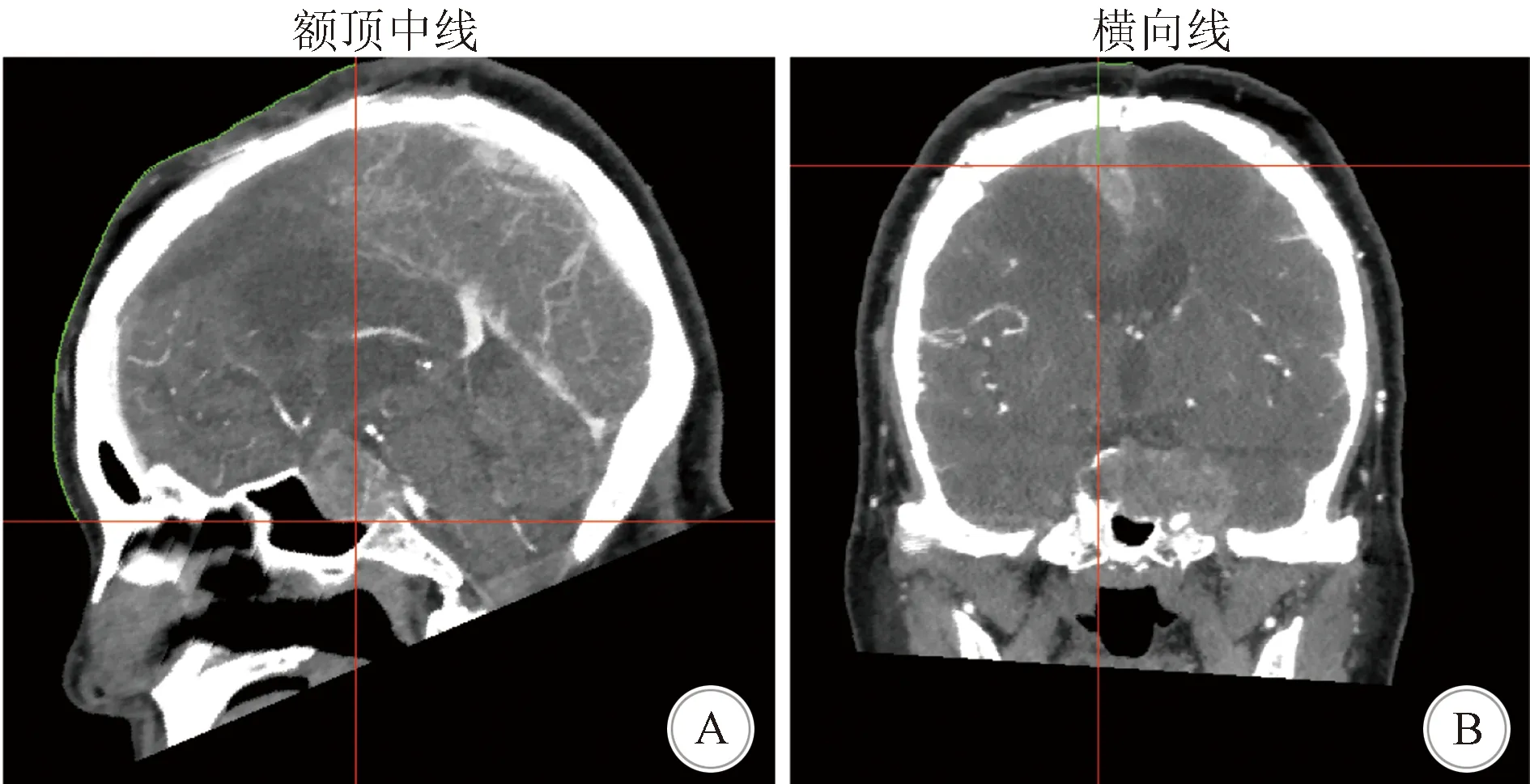
得到切面的基本思路是:給定切面上各點在新坐標系的坐標值,逆映射回原坐標系中,即可知各點在原來的掃描圖像中的位置,從而獲取各點的像素值。矢狀位切面在x=0面上,設定其大小為500×500,其左上點為(x=0,y=100,z=300)。將該區域的點映射到原坐標系中即可獲取原始像素值,見圖3A。冠狀位切面在y=TargetY面上,TargetY為靶點在新坐標系中的y坐標值;同樣設定其大小為500×500,其左上點為(x=TargetX-200,y=TargetY,z=300);見圖3B。
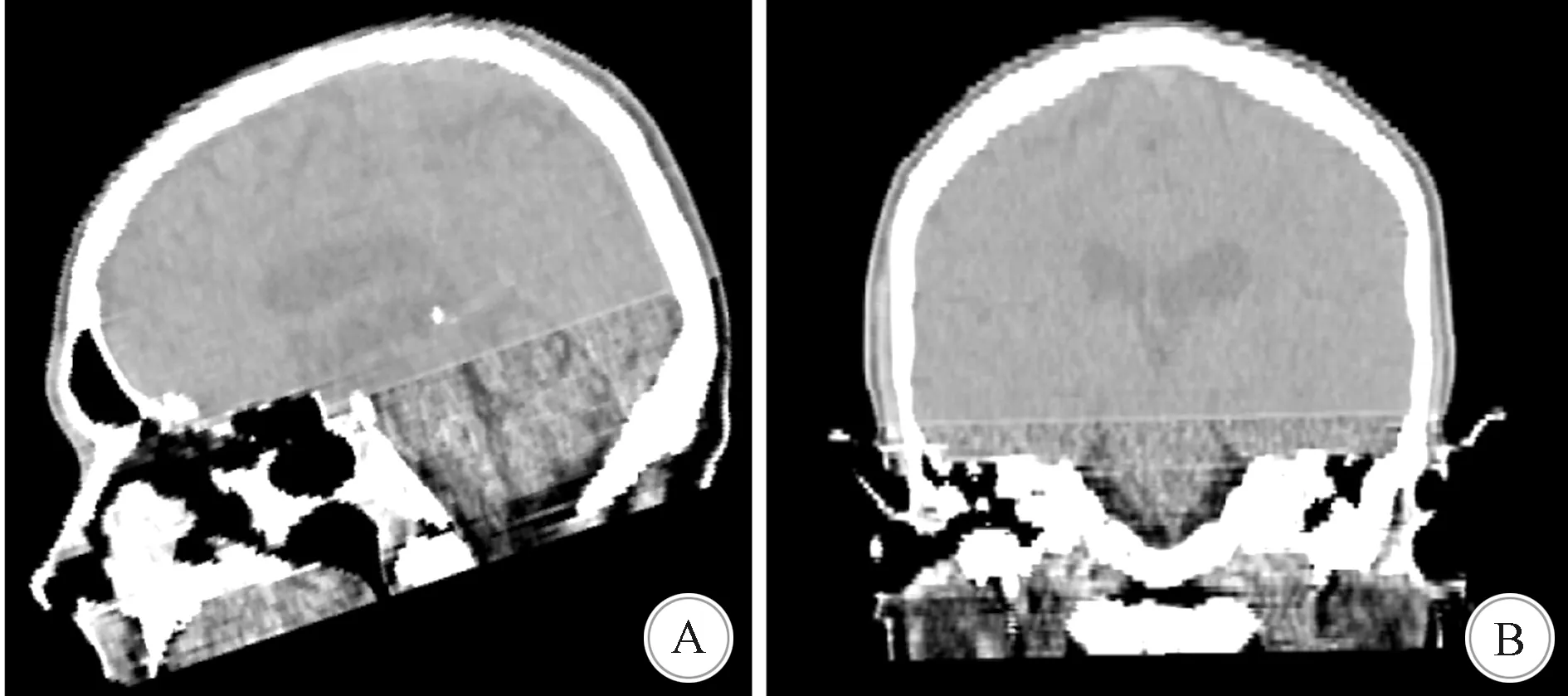
A:矢狀位切面; B:冠狀位切面
1.4 輪廓線提取和長度估算 得到兩個切面后,在切面圖中提取兩段額頂輪廓線。第一段輪廓線在矢狀位切面,水平線過眉心,平行于基準面,其z坐標為0;垂直線為y=TargetY,靶點所在面過垂直線,垂直于切面(圖4A);兩條線之間的左上部頭顱輪廓線即為第一段額頂定位路線。第二段輪廓線在冠狀位切面,水平線過靶點,垂直線同樣過靶點,顱頂部分的輪廓線即為第二段定位路線(圖4B)。在頭顱表面,該線與第一段輪廓成90°。選輪廓點基本原則為:在下45°區域取橫向的外延點,上45°區域用縱向的外延點。計算輪廓線長度時取點要有一定的間隔,以間距2~4個像素點為佳。
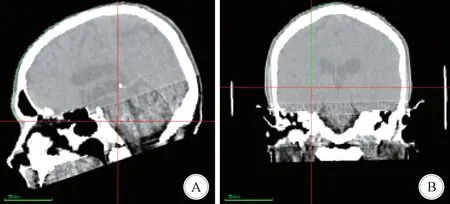
A:矢狀位切面輪廓線(額頂部綠線); B:冠狀位切面輪廓線(顱頂部綠線)
1.6 計算結果匯總 定位軟件的計算結果包含7個位置點的新坐標值;顳側定位結果可從靶點與耳孔的坐標值關系算出;額頂中線定位結果包括矢位線的長度、冠狀位線長度及深度。兩個切面圖上標出輪廓線及比例尺,程序日志輸出。見圖5。
A:矢狀位; B:冠狀位,由眉心始沿額頂中弧線73.2 mm處,往頭顱右側沿橫向弧線10.2 mm,垂直于兩耳孔和兩外眥線確定的基準面鉆孔深度為28.4 mm
2 結 果
將上述運算結果的數據應用于近200例大腦鐮旁占位患者的手術定位,均能成功準確定位。與根據患者MRI檢查結果設計的手術區域完全一致。目前本研究開發的是服務器軟件,神經外科醫師使用時需要先在瀏覽器上登錄注冊,將患者的MRI數據上傳,然后從3個維度(水平位、矢狀位、冠狀位)平面鎖定7個位置點:左外眥、右外眥、左外耳孔、右外耳孔、前腦鐮、后腦鐮及手術靶點(也可以是設計手術區的前后上下邊界點),即可自動生成手術定位數據(圖5)。
3 討 論
目前對大腦鐮旁占位定位比較準確的是立體定向和神經導航定位。立體定向定位操作過程中需要給患者顱骨上安裝頭架,后再次行顱腦CT掃描,增加了手術時間,且頭架的安裝影響了手術操作的靈活性[10-11];而且目前國內多數立體定向頭架與內鏡系統的兼容性較差[12]。神經導航需要進行注冊軟件[13]等,手術準備時間較長[14]。由于此類醫療設備價格昂貴,目前多數醫院(尤其是基層醫院)不能裝備立體定向儀或神經導航設備,所以此類手術的定位多數醫生仍是根據CT片,結合臨床經驗,粗略估計測量定位。為了相對準確定位,部分神經外科醫生采用“CT顱表定位柵”、“折耳法”、“CT激光標記”[15-17]或其他自制的體表定位標記物進行輔助定位,雖然都能明顯地提高定位的準確性,但需要對患者再進行一次顱腦CT或MRI檢查,增加了醫療費用。本研究的定位方法可為每例患者節省定位費用200元,僅華北油田公司總醫院一年頭顱手術及穿刺術2 500臺,就可節省定位費用500 000元。如果此方法能在全國普及其經濟價值將非常可觀。
本定位方法靶點的選擇可分別選擇病灶的前后及上下邊界,分別計算出具體數據,并在三維圖像上直觀顯示。將數據在患者頭皮上可直接用軟皮尺量出來,并用記號筆標記即可。腫瘤的上下邊界具體參考價值與手術的入路選擇有關,手術醫生可酌情參考。上述計算結果應用于患者的定位效果非常理想。
影像學檢查技術的飛躍發展,給臨床診斷和治療帶來了很多的便利。目前,影像學檢查用于診斷的偏多,若其能更直接地、數字化地用于手術治療中,將對精準定位幫助巨大,能減少差錯,減少患者的痛苦及醫療費用。目前相關技術也在快速發展。機器人輔助的無框架神經導航技術將顱腦穿刺手術技術精確到了毫米的級別[11,18-19]。部分甚至采用3D打印技術定位大腦鐮旁占位[20],但費用非一般醫院能承受。大腦鐮旁占位手術為開顱手術,定位精確度的要求較高[21]。目前還沒有簡單實用但又精確的手術定位方法,本定位方法通過測量眉間到腫瘤前后邊界的距離,直接給手術醫生提供數據,極大地方便了手術。而且本軟件基于云平臺部署,在瀏覽器內使用,這樣使各地臨床醫生通過網絡就可以方便地應用該手術定位軟件,達到資源共享,極大地方便了臨床工作的需要。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48