區(qū)域坐標(biāo)轉(zhuǎn)換模型對比分析
2021-05-07 01:44:00范咪娜
礦山測量 2021年2期
王 萌,高 遠(yuǎn),范咪娜
(山東正元數(shù)字城市建設(shè)有限公司,山東 煙臺 264670)
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)于2020年成功組成完整星座系統(tǒng),標(biāo)志著BDS在全球范圍內(nèi)具有了定位能力、在中國范圍內(nèi)具有了高精度定位能力[1-3]。GPS系統(tǒng)使用的坐標(biāo)系統(tǒng)為WGS-84系統(tǒng),而我國組建的BDS系統(tǒng)的坐標(biāo)系統(tǒng)為CGCS2000[4-6]。隨著BDS的逐步普及,全國范圍內(nèi)的CGCS2000的建立就顯得尤為關(guān)鍵[7-10]。我國使用的1980西安坐標(biāo)系統(tǒng)將逐漸被CGCS2000取代,各地區(qū)已經(jīng)開展了相關(guān)的坐標(biāo)系統(tǒng)轉(zhuǎn)換工作;由于衛(wèi)星定位系統(tǒng)的坐標(biāo)系統(tǒng)由WGS-84轉(zhuǎn)化為了CGCS2000,因此也需要在這兩種坐標(biāo)系之間進(jìn)行轉(zhuǎn)換,以獲得某些控制點的CGCS2000坐標(biāo)值以提供靜態(tài)定位的初始值[11-12]。
區(qū)域坐標(biāo)系統(tǒng)轉(zhuǎn)換有多種數(shù)學(xué)模型,布爾莎四參數(shù)是最為常見、計算最為簡單的模型,隨著測區(qū)增大也可以增加為七參數(shù)[13-14]。四參數(shù)轉(zhuǎn)換模型屬于相似變化模型,不同坐標(biāo)系間的差別主要取決于兩個方面:坐標(biāo)系定位、定向、橢球參數(shù)及尺度因子;局部誤差和累積誤差,其中局部誤差屬于變形誤差,累積誤差來自測量控制網(wǎng)[15-16]。仿射六參數(shù)模型在布爾莎四參數(shù)的基礎(chǔ)上增加了兩坐標(biāo)軸的尺度因子,由于存在坐標(biāo)軸尺度因子使此種模型在布爾莎四參數(shù)的基礎(chǔ)上更為靈活[17-18]。多項式逼近模型是一種數(shù)學(xué)逼近模型,與坐標(biāo)轉(zhuǎn)換原理無關(guān),根據(jù)參數(shù)數(shù)量只要提供足夠的已知點數(shù)據(jù),即可進(jìn)行預(yù)測,此方法的優(yōu)點是可以摒棄坐標(biāo)系統(tǒng)本身的系統(tǒng)誤差對坐標(biāo)轉(zhuǎn)換原理的誤差影響,得到更優(yōu)的計算結(jié)果。但在一些高精度的已知坐標(biāo)轉(zhuǎn)換中,可能無法獲得高精度的轉(zhuǎn)換結(jié)果[19-20]。
本文以四川某區(qū)域施工坐標(biāo)系與CGCS2000的轉(zhuǎn)換工作為例,通過平面四參數(shù)模型、仿射六參數(shù)模型和多項式逼近模型的計算,探討此區(qū)域坐標(biāo)轉(zhuǎn)換中的最佳計算方法,為建立CGCS2000提供經(jīng)驗。
1 轉(zhuǎn)換模型
1.1 平面四參數(shù)模型

(1)

令(1+m)Δx=a,(1+m)Δy=b,(1+m)cosα=c,(1+m)sinα=d,式(1)可簡化為:
(2)
由以上原理,只需要2個已知點,即可利用最小二乘法建立超定方程組求最小二乘解。
1.2 仿射六參數(shù)模型
仿射六參數(shù)坐標(biāo)轉(zhuǎn)換公式見式(3):
(3)
式中,mx和my分別為兩坐標(biāo)軸的尺度因子。
利用最小二乘法進(jìn)行解算,至少需要3個已知點,將其化簡為相關(guān)的6個參數(shù),稱其為仿射六參數(shù)模型。若只需要進(jìn)行坐標(biāo)轉(zhuǎn)換,可在求出6個參數(shù)后直接進(jìn)行轉(zhuǎn)換而不需求出原始的5個因子。與平面四參數(shù)模型類似,可以通過式(2)的方法簡化計算。
令(1+mx)Δx=a1,(1+mx)cosα=a2,(1+mx)sinα=a3,(1+my)Δy=b1,-(1+my)sinα=b2,(1+my)cosα=b3,式(3)可化簡為:
(4)
1.3 多項式逼近模型
多項式逼近模型如式(5)和式(6)所示:
(5)
(6)
式中,α0,α1,…,α5、β0,β1,…,β5為多項式系數(shù);(xk,yk)0是變換中心附近一個點的坐標(biāo)。
2 實例計算
本次實例計算選用四川某城市控制網(wǎng)坐標(biāo),已知數(shù)據(jù)如表1所示。特別說明,由于坐標(biāo)原始數(shù)據(jù)比較重要,表中坐標(biāo)值已經(jīng)經(jīng)過一定程度的變換,非原始坐標(biāo)。評價計算結(jié)果時,以計算值和真值的差作為殘差。
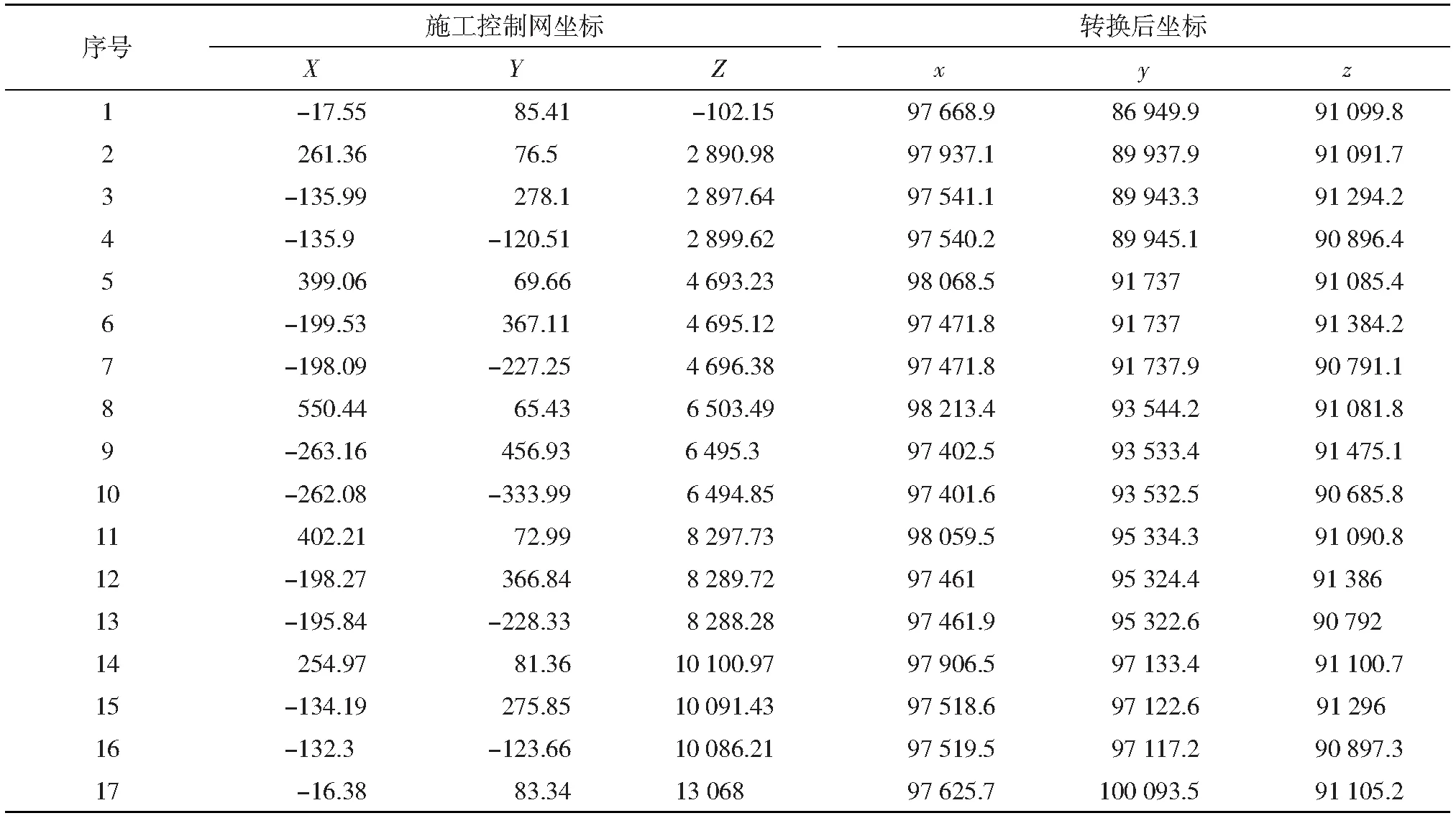
表1 已知數(shù)據(jù)/m
2.1 平面四參數(shù)模型計算
將式(2)改寫誤差方程,如式(7)所示:
V=BX-L
(7)
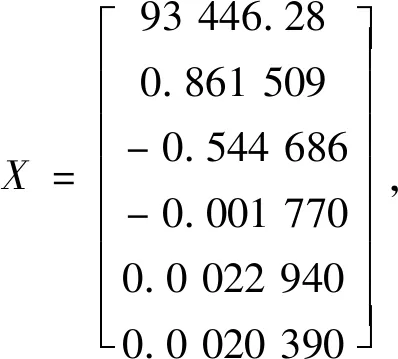
求式(7)的最小二乘解,公式如式(8)所示:
X=(BTB)-1BTL
(8)
2.2 仿射六參數(shù)模型計算
2.3 多項式逼近模型計算
將式(5)改寫誤差方程,如式(7)。式中,V為改正數(shù);

將式(6)改寫誤差方程,如式(7)。式中,V為改正數(shù);
3 計算結(jié)果分析
將平面四參數(shù)模型、仿射六參數(shù)模型和多項式逼近模型計算殘差繪制折線圖,如圖1~圖2所示。
為更為詳細(xì)地評價三種模型的計算精度,引入觀測值的中誤差這一精度評價方法,其公式見式(9):
(9)
式中,m為觀測值的中誤差;v為誤差;[]為求和符號;n為觀測次數(shù)。
計算三種模型的X坐標(biāo)與Y坐標(biāo)的中誤差,如表2所示。
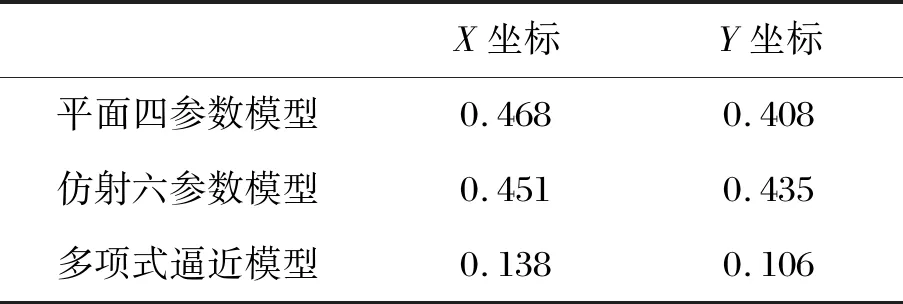
表2 中誤差/m
由圖1可以看出,平面四參數(shù)轉(zhuǎn)換后X坐標(biāo)精度不高,出現(xiàn)了一些殘差達(dá)到±0.7~±0.8 m的坐標(biāo)點,X坐標(biāo)中誤差為0.468 m;仿射六參數(shù)X坐標(biāo)精度較低,出現(xiàn)了一些殘差達(dá)到-0.95~0.95 m的坐標(biāo)點,X坐標(biāo)中誤差為0.451 m;多項式逼近X坐標(biāo)精度很高,殘差集中在-0.3~0.3 m之間,X坐標(biāo)中誤差為0.138 m。
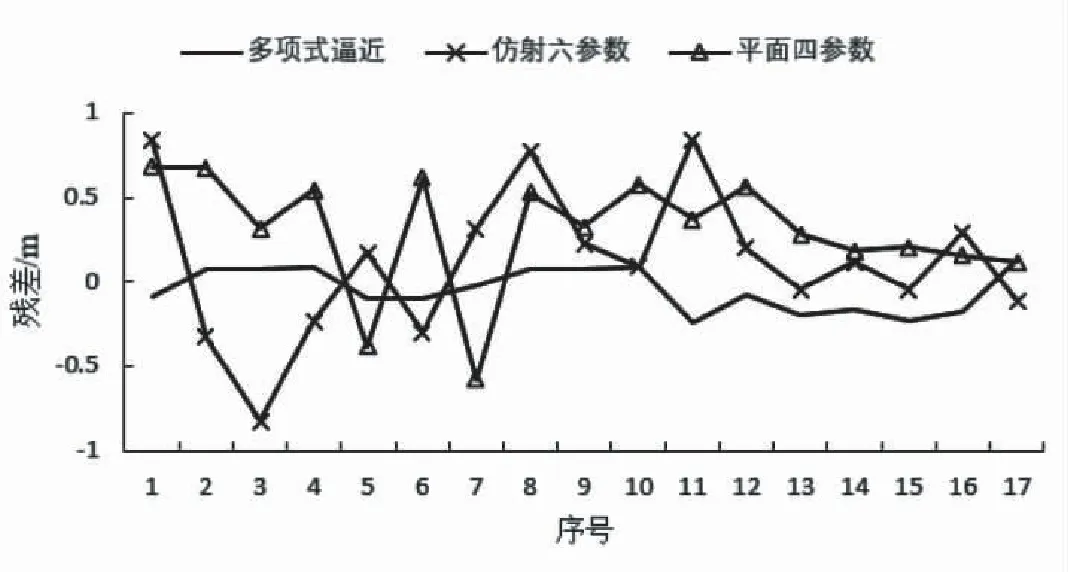
圖1 X坐標(biāo)誤差
由圖2可以看出,平面四參數(shù)轉(zhuǎn)換后Y坐標(biāo)精度不高,出現(xiàn)了一些殘差達(dá)到0.7~0.8 m的坐標(biāo)點,但負(fù)值范圍內(nèi)精度尚可,Y坐標(biāo)中誤差為0.408 m;仿射六參數(shù)Y坐標(biāo)精度不高,出現(xiàn)了一些殘差達(dá)到-0.5~0.95 m的坐標(biāo)點,Y坐標(biāo)中誤差為0.435 m;多項式逼近轉(zhuǎn)換后Y坐標(biāo)精度很高,殘差集中在-0.2~0.2 m之間,Y坐標(biāo)中誤差為0.106 m。
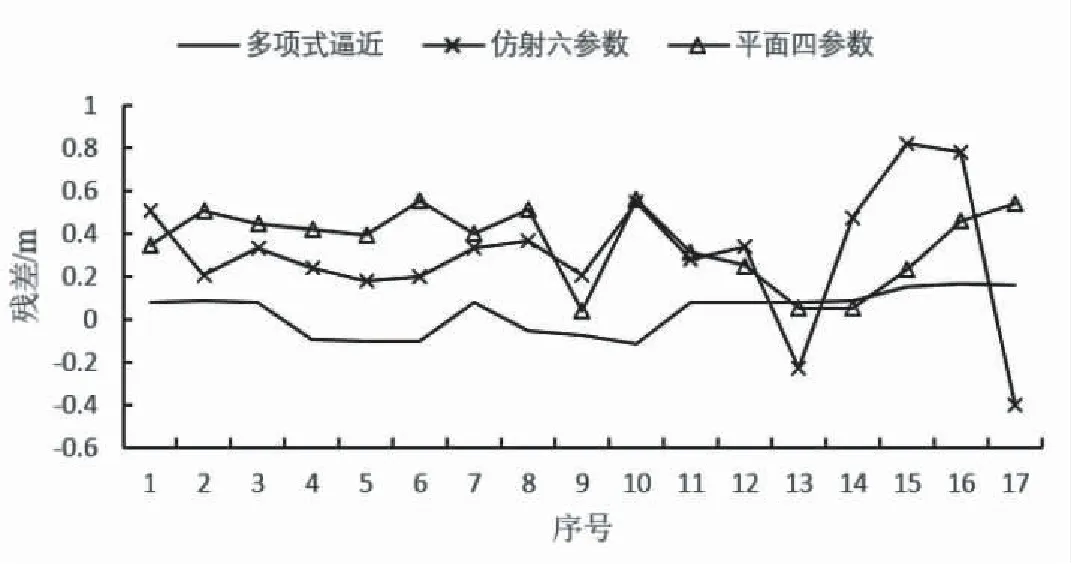
圖2 Y坐標(biāo)誤差
三種模型計算結(jié)果的殘差值如表3所示。
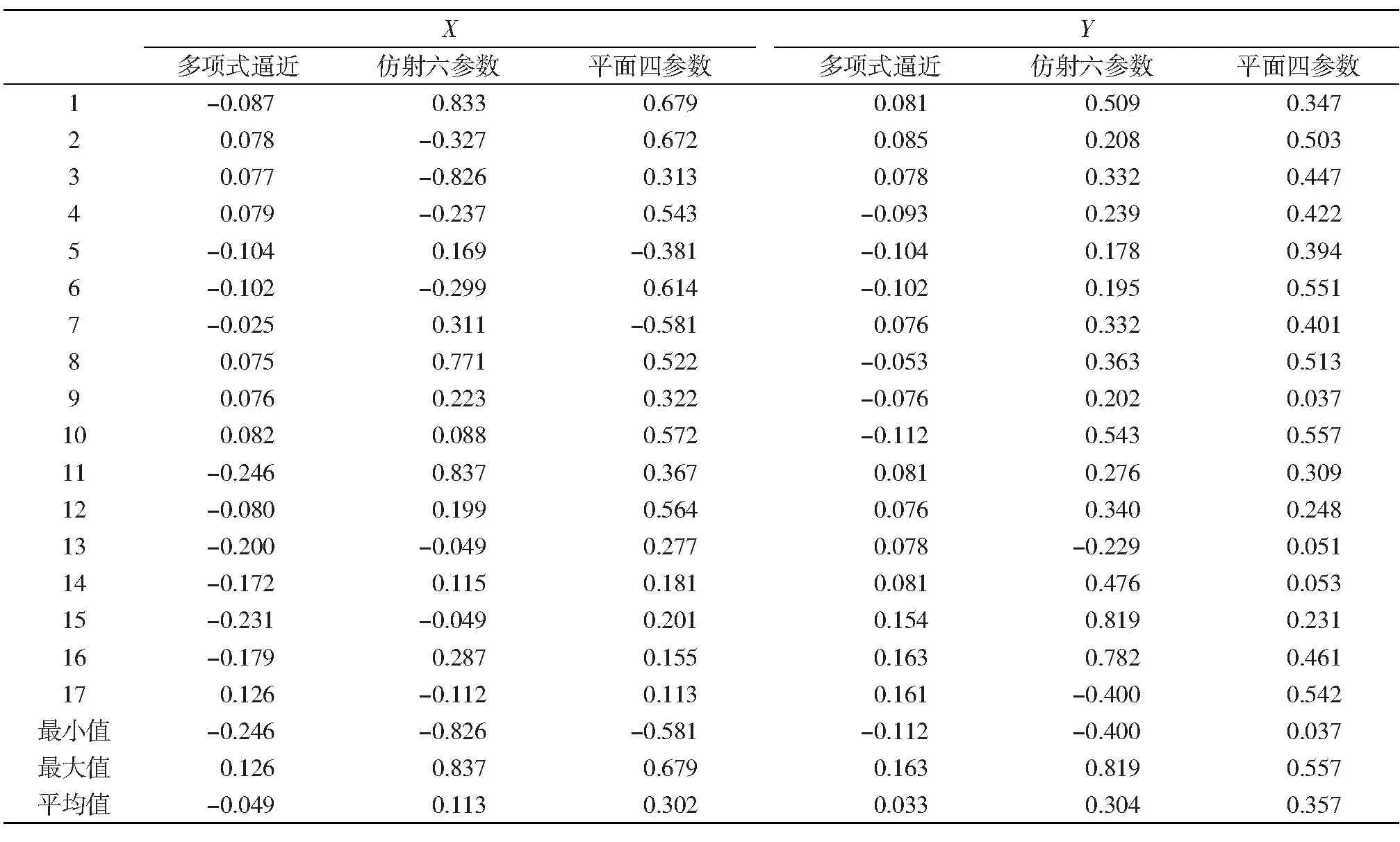
表3 三種模型計算殘差對比/mm
由表3可知,平面四參數(shù)模型計算X坐標(biāo)殘差最小值為-0.581 m,最大值為0.679 m;Y坐標(biāo)殘差最小值為0.037 m,最大值為0.557 m;仿射六參數(shù)模型計算X坐標(biāo)殘差最小值為-0.826 m,最大值為0.837 m;Y坐標(biāo)殘差最小值為-0.400 m,最大值為0.819 m;多項式逼近模型計算X坐標(biāo)殘差最小值為-0.246 m,最大值為0.126 m;Y坐標(biāo)殘差最小值為-0.112 m,最大值為0.163 m。綜合三種模型計算的殘差圖、殘差表、中誤差、最大最小值,多項式逼近模型精度較高,殘差大多維持在厘米級,轉(zhuǎn)換后的坐標(biāo)值可以用于實際工程測量中。
4 結(jié) 論
本文以四川某區(qū)域施工坐標(biāo)系與CGCS2000的轉(zhuǎn)換工作為例,通過平面四參數(shù)模型、仿射六參數(shù)模型和多項式逼近模型的計算,探討此區(qū)域坐標(biāo)轉(zhuǎn)換中的最佳計算方法。通過實例計算發(fā)現(xiàn),平面四參數(shù)和仿射六參數(shù)模型計算精度較低,原因是原始轉(zhuǎn)換坐標(biāo)為施工控制網(wǎng)坐標(biāo),建立時不夠精確,會帶有一定的系統(tǒng)誤差,而平面四參數(shù)和仿射六參數(shù)均為按照坐標(biāo)轉(zhuǎn)換原理推導(dǎo)的數(shù)學(xué)模型,因此在該區(qū)域坐標(biāo)轉(zhuǎn)換中效果較差;多項式逼近模型是一種純數(shù)學(xué)模型,可以更好地避免系統(tǒng)誤差,得到較好的區(qū)域坐標(biāo)轉(zhuǎn)換效果。
為進(jìn)一步提高坐標(biāo)轉(zhuǎn)換精度,下一步工作可嘗試對模型擬合點與檢核點的方案進(jìn)行討論,在已知點中選取若干擬合點進(jìn)行模型預(yù)測,使用檢核點評價模型精度,以確定該區(qū)域坐標(biāo)轉(zhuǎn)換的最優(yōu)擬合點分布。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44