一種分布式雷達/紅外復合制導信息融合方案
2021-04-20 02:56:56李時光磨國瑞
火控雷達技術 2021年1期
李時光 李 云 職 曉 磨國瑞
(西安電子工程研究所 西安 710100)
0 引言
現代戰爭的戰場環境日益復雜,電子對抗的手段也越來越多樣化,這就對精確制導武器的探測精度、抗干擾能力及穩定性提出了越來越高的要求。多模復合制導武器能夠充分發揮各制導體質的優勢,互相彌補各自的天然劣勢,從而達到強-強聯合的目的。自20世紀70年代中期以來,多模復合制導技術一直是精確制導武器的主要發展方向之一。
主動雷達/紅外成像復合制導是一種非常經典的復合制導方式,目前國內外已經列裝或正在研制的主動雷達/紅外成像復合制導武器層出不窮。主動雷達具備在全天候、全天時下大范圍快速搜索和跟蹤目標能力,但隱蔽性較差,易于被敵方偵察、干擾,目標分類識別能力較差。而紅外成像制導具有測角精度高、抗電子干擾能力強、目標識別能力強等優點,可以很好地解決復雜背景下目標選擇問題,但紅外制導易受天氣、戰場煙霧影響。采用雷達與紅外成像雙模復合制導可以提升導彈在復雜電磁環境和復雜背景下全天時、全天候探測制導能力并提升導彈的打擊精度、抗干擾性能及生存能力。
在雷達/紅外復合制導系統中,信息融合中心會接收到雷達和紅外分系統提供的大量信息,如雷達提供的角度、距離;紅外提供的角度、尺寸。這些信息有些是互補的,有些又是冗余的。同時,彈上系統對導引頭數據處理流程的實時性要求很高。因此,如何充分并高效地利用這些互補和冗余信息是信息融合系統需要解決的重要問題。
本文針對某毫米波雷達/紅外成像復合制導系統,給出了一種分布式信息融合方案,主要完成了信息融合策略的制定及對信息融合方案的測試驗證。
1 信息融合方案設計
多模復合導引頭的復合方式主要有分平臺、共平臺分孔徑、共平臺共孔徑三種,這三種復合方式各有優劣[1]。本文從彈內空間、開發成本、實現難度、復合精度等多方面需求出發,選取共平臺分孔徑方式作為導引頭復合結構。
信息融合系統按照融合結構可劃分為集中式、分布式、混合式和多級式[2-3]。在分布式融合系統中,每個傳感器首先對各自的本地觀測數據進行航跡跟蹤,產生本地航跡,然后由融合中心進行信息融合處理并形成融合航跡。與其他三種融合系統相比,分布式信息融合系統的融合精度雖然不高,但其具有運算量小、通信負擔輕、成本低、易于工程實現的優勢[4-5],而且不論哪個單模傳感器失效時,整個導引頭系統仍能正常工作,具有較高的可靠性和容錯性[6]。
本文結合毫米波雷達/紅外成像復合制導系統總體方案,在現有硬件條件下,綜合考慮開發成本、運算量、通信速率等因素,給出了一種分布式信息融合方案,其結構示意圖如圖1所示。

圖1 分布式信息融合方案結構示意圖
如圖1所示,雷達與紅外分系統首先分別完成對同一目標環境的觀測,得到雷達回波數據和紅外圖像。接下來,雷達/紅外分系統分別對各自的觀測數據進行處理,形成本地航跡,然后,分別將各自形成的航跡及狀態信息送往信息融合中心,由信息融合中心完成對這兩種傳感器航跡信息的時空配準、航跡關聯、航跡融合等處理,最后形成用于引導伺服運動和導彈飛行的系統航跡。
與雷達和紅外分系統相比,信息融合中心掌握著最全面的決策層信息,因此,本方案中,信息融合中心在進行航跡關聯、航跡融合等算法處理的同時,會根據雷達和紅外上報的各分系統當前所處的工作狀態作出分析和判決,對各分系統的工作方式進行實時反饋和控制,輔助并引導各分系統完成對目標的檢測和跟蹤。
2 信息融合策略制定
在復合導引頭工作過程中,雷達、紅外分系統的工作狀態均主要有搜索狀態和跟蹤狀態。融合器主要有6種工作狀態:雷達搜索、紅外搜索、復合搜索、雷達跟蹤、紅外跟蹤和復合跟蹤。融合器會根據各分系統上報的實時狀態信息在以上6種工作狀態中完成切換。在某一特定時刻,融合器只會處于以上6種狀態中的特定一種,在每種狀態下,融合器都會向雷達、紅外及伺服平臺發送相應的控制指令和數據,以此來引導各分系統進行相應的操作。
如前文所述,本文采用分布式信息融合結構,這種結構最突出的優勢在于信息融合系統對各分系統的依賴性比較低,不論雷達還是紅外,都可以在另一種傳感器不開機或失效的情況下獨立完成制導。因此,復合導引頭信息融合中心的控制流程需要在雷達單模制導、紅外單模制導、雷達/紅外雙模復合制導這3種情況下討論。
1)雷達單模制導
當雷達單模制導時,融合器工作狀態遷移圖如圖2所示。
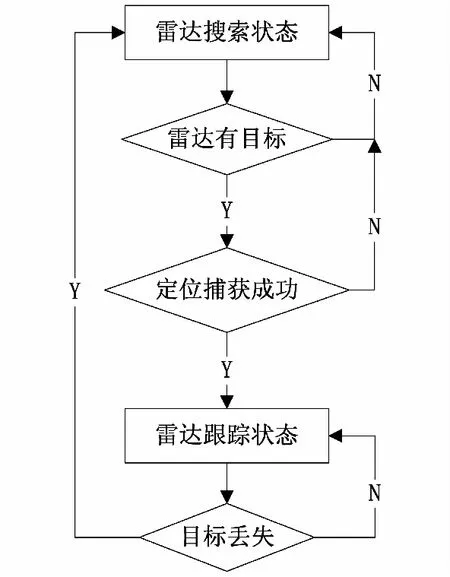
圖2 信息融合系統狀態遷移圖(雷達單模制導)
當融合器得知雷達處于搜索狀態時,融合器將處于雷達搜索狀態,在此狀態下,融合器一方面關注雷達是否搜索到目標,一方面控制伺服平臺運動以實現雷達天線的掃描。當融合器收到雷達上報的目標并判斷該目標有效后,向雷達發送“定位捕獲”指令,若雷達未能成功捕獲目標,則融合器停留在雷達搜索狀態,否則轉入雷達跟蹤狀態,在雷達跟蹤狀態下,融合器一方面利用雷達航跡更新系統航跡,一方面實時監控雷達是否穩定跟蹤目標,一旦雷達丟失目標,融合器將轉入雷達搜索狀態,并向雷達下發搜索指令,重新檢測目標。
2)紅外單模制導
當紅外單模制導時,融合器工作狀態遷移圖如圖3所示。與雷達單模制導的情況類似,融合器一方面通過紅外分系統上報的狀態來切換自身的工作狀態,一方面通過“紅外搜索”、“定位捕獲”等指令來引導紅外分系統的工作,同時控制伺服平臺的運動,具體的狀態切換過程不做贅述,可參考“雷達單模制導”情況。

圖3 信息融合系統狀態遷移圖(紅外單模制導)
3)雙模復合制導
當雙模同時開機時,融合器工作狀態遷移圖如圖4所示。

圖4 信息融合系統狀態遷移圖(雙模復合制導)
在這種情況下,融合器首先處于復合搜索狀態,在此狀態下,不斷實時監測雷達/紅外分系統是否搜索到目標,此時有兩種情況:
①雷達先搜索到目標并進入跟蹤狀態。這種情況下,融合器轉入雷達跟蹤狀態。此時,融合器會根據雷達航跡控制伺服平臺的位置,并向紅外分系統發送“定位捕獲”指令,引導紅外檢測當前視場內的目標,若紅外檢測到目標并轉入跟蹤狀態,則融合器進入復合跟蹤狀態。
②紅外先搜索到目標并進入跟蹤狀態。此時,融合器轉入紅外跟蹤狀態,并根據紅外航跡控制伺服平臺,同時向雷達發送“定位捕獲”指令,引導雷達對當前視場內的目標進行檢測,若雷達也成功捕獲目標并轉入跟蹤狀態,則融合器轉入復合跟蹤狀態。
當融合器處于復合跟蹤狀態時,融合器一方面對雷達和紅外上報的目標位置和狀態信息進行關聯融合,另一方面實時關注各分系統是否穩定跟蹤目標。若雷達丟失目標,則融合器進入紅外跟蹤狀態,利用紅外跟蹤的目標信息作為引導,指示雷達在特定視場內進行目標檢測;若紅外丟失目標,融合器轉入雷達跟蹤狀態,此時借助雷達上報的目標信息引導紅外進行定位檢測;若雷達、紅外均丟失目標,則融合器進入復合搜索狀態,重新進行目標檢測。
如前文所述,如果雷達(紅外)成功捕獲并穩定跟蹤了某個目標,而紅外(雷達)未檢測到或丟失目標,融合器都可以將穩定跟蹤目標的狀態數據作為指示信息引導紅外(雷達)進行定位檢測。由此可見,如果將雷達和紅外比作人的“耳朵”和“眼睛”,那么融合器則承擔著“大腦”的角色,它既要實現雷達、紅外傳感器數據的共享,使得二者能夠相互借鑒,互相指引,又要根據這兩個傳感器上報的目標信息進行綜合判斷,并作出決策,實時計算出用于引導伺服運動和導彈飛行的控制信息。因此,如何在跟蹤狀態(包括雷達跟蹤狀態、紅外跟蹤狀態和復合跟蹤狀態)下充分利用雷達/紅外傳感器實時上報的測量數據是信息融合系統需要解決的重要問題。
本文結合實際應用背景及雷達/紅外分系統的性能,制定了如圖5所示的融合器數據處理流程,主要解決了如何在跟蹤狀態下更新系統航跡的問題。
如圖5所示,復合導引頭開機后,會根據彈上綜控機裝訂的指示信息進行目標檢測,并根據檢測結果在合適的時機進入跟蹤狀態,這里分三種情況進行討論:
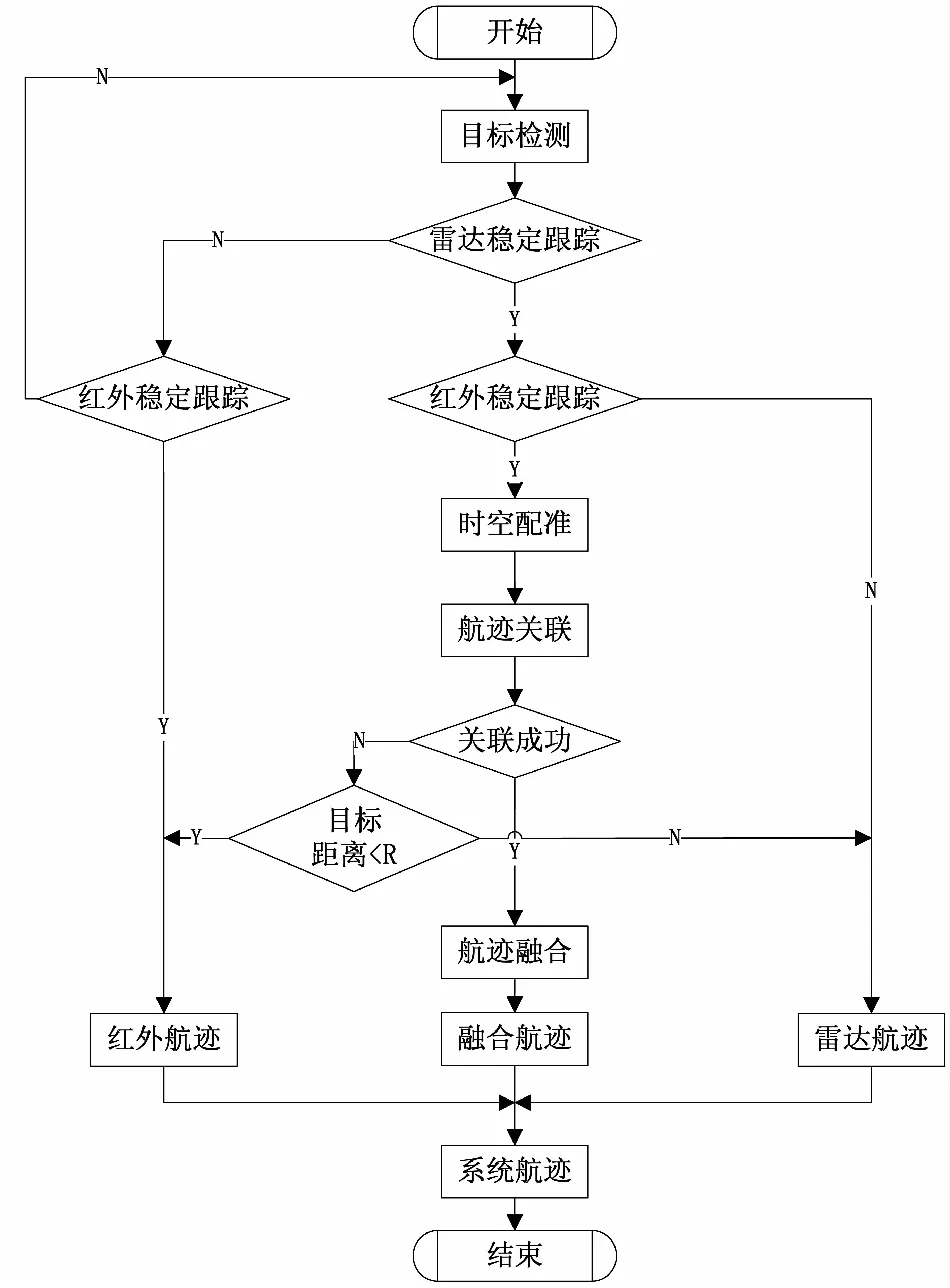
圖5 信息融合系統數據處理流程
1)僅雷達穩定跟蹤目標。使用雷達航跡更新系統航跡,并向紅外發送“定位捕獲”指令,令紅外在當前視場內進行目標檢測。
2)僅紅外穩定跟蹤目標。使用紅外航跡更新系統航跡,并向雷達發送“定位捕獲“指令,令雷達在當前視場內進行目標檢測。
3)雷達紅外均穩定跟蹤目標。此時,首先將雷達/紅外上報的航跡信息配準到同一時間節點和同一空間坐標系下,再對配準后的航跡進行關聯。若關聯成功,則認為雷達/紅外跟蹤同一目標,融合器對關聯上的航跡對進行航跡融合,并使用融合航跡更新系統航跡;若未能關聯成功,則認為雷達/紅外跟蹤的不是同一目標,此時對目標的距離信息進行判斷,若目標距離小于R,則使用紅外航跡更新系統航跡,否則使用雷達航跡更新系統航跡。
3 系統測試及分析
為驗證上述信息融合方案及相關算法的有效性和合理性,本項目組進行了多組外場試驗。接下來以其中兩組典型試驗場景為例,進行試驗結果分析。
1)場景1:目標船靜止,與導引頭之間的距離小于R,雷達/紅外向融合器上報的目標角度以及經過融合處理后得到的融合角度信息如圖6所示。A時刻前,雷達/紅外復合跟蹤目標船,雷達航跡與紅外航跡關聯失敗,按照圖5所示的數據處理流程,融合器以紅外航跡更新系統航跡。從A時刻開始,另一艘船只從目標船旁邊經過,雷達受到該船只的干擾,丟失目標船,轉而跟蹤干擾船只,但紅外未受到干擾,仍然跟蹤目標船。到B時刻,雷達目標丟失,此時,融合器進入紅外跟蹤狀態。按照圖4所示的信息融合策略,融合器并向雷達發送“定位捕獲”指令,以紅外跟蹤目標的角度信息為指向,引導雷達在當前視場內重新進行目標檢測。到C時刻,雷達重新捕獲目標船,融合器再次進入復合跟蹤狀態。

圖6 雷達受干擾情況
2)場景2:目標船慢速運動,與導引頭相距超過R。雷達偏差角、紅外偏差角以及融合偏差角如圖7所示。在A時刻之前,雷達/紅外復合跟蹤目標船,雷達/紅外航跡關聯成功,融合器以融合航跡更新系統航跡。A時刻開始,一艘尺寸較大的船只從視場內經過,紅外受到該船的拖引,丟失目標船,轉而跟蹤干擾船只,但干擾船只并不在雷達跟蹤波門內,因此雷達未受到干擾,仍然跟蹤目標船。到B時刻,紅外進入目標丟失狀態,按照圖4所示的信息融合策略,融合器此時向紅外發送“定位捕獲”指令,以雷達跟蹤目標的角度信息引導紅外進行定位檢測,直到C時刻,紅外重新捕獲到目標船,融合器再次進入復合跟蹤狀態。
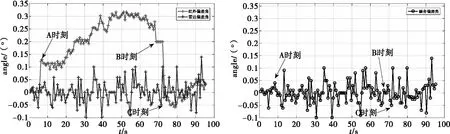
圖7 紅外受干擾情況
從以上兩組試驗可以看出,當融合器處于復合跟蹤狀態時,能夠根據目標信息及各單模傳感器的優勢選擇合適的策略來更新系統航跡,當某一模傳感器受到干擾或處于目標丟失狀態時,融合器都能夠根據另一模傳感器航跡更新系統航跡,并引導受干擾或丟失目標的傳感器進行定位檢測,重新捕獲目標。由此可見,前文所述的信息融合策略能夠高效并充分利用雷達/紅外分系統上報的測量信息,并根據二者的優勢來來彌補對方的劣勢,使得各分系統互為指示,提高了導引頭的跟蹤性能和抗干擾能力。
4 結束語
本文設計了一種分布式信息融合方案,并制定了信息融合系統融合策略和控制流程。最后通過幾組外場實驗表明:該信息融合方案能夠合理并高效地利用雷達和紅外提供的信息,間接完成異類傳感器之間的數據共享,使得雷達和紅外分系統能夠互相引導,盡可能地彌補了對方工作體制上的不足,有效提升了復合導引頭的整體性能,為復合導引頭的研制提供了較高的參考價值。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32