智能制造背景下的課程教學改革與探索
2021-03-15 05:25:07魯欣師樹謙盧文濤
科技風 2021年3期
關鍵詞:課程改革
魯欣 師樹謙 盧文濤
摘 要:在智能制造背景下,各個制造領域對機器人工程專業人才的能力有了更多的要求,企業更加需要應用型、復合型的機器人人才。針對這些新的要求,本文首先分析了目前機器人工程專業的教學現狀,然后在機器人相關課程、實踐教學、課程改革、課程考核等方面進行了一定的探索,提出了一定的教學改革方法,并通過教學實踐、取得了一定的效果,有效地提升了學生的知識水平與應用能力。
關鍵詞:智能制造;機器人工程專業;課程改革
2015年,國務院發布了《中國制造2025》戰略,標志著我國的制造行業要向著更加智能化的方向發展。機器人作為《中國制造2025》十大領域中的重要一環,必將成為工業制造、未來智能制造必不可少的一部分[1],越來越多的企業都希望能有更多掌握機器人技術的復合型人才來實現機器人智能化的操作。然而,與機器人技術的快速發展和機器人工業應用的與日俱增相對比,機器人技術人才的缺口卻越來越大,部分原因在于機器人專業人才培養還處于起步階段,人才培養方式還不能完全契合市場的發展需求[2]。而在機器人人才培養過程中,專業課程學習是一個十分重要的環節。因此,本文將以智能制造為背景,探討如何將機器人工程專業的課程進行改革,以培養出符合市場與企業需求的人才。
一、機器人專業課程教學現狀
機器人行業所需的人才能力技術主要包括:機械設計技術、驅動技術、傳感技術、控制技術、視覺技術,系統編程仿真技術等[3-4]。但是,對于以上技術內容,傳統的機器人專業教學卻存在著教材少、教材適應市場程度不高、教材偏重理論性等劣勢。教材少,指的是針對機器人工程專業課程來說,大部門課程沒有與其相對應的教材。在教學過程中如果采用傳統的教材對機器人工程專業學生進行授課,就會造成課程培養的最終能力目標與機器人行業要求目標相脫離。教材適應市場程度不高指的是教材的內容比較陳舊,跟不上時代的發展,這些陳舊的書本內容達不到智能制造背景下的復合型人才培養目標。教材偏重理論性指的是部分教材只偏重理論知識的講解,卻不重視實踐能力的引導,在此情況下,學生很難達到企業所要求的應用型人才的能力。
機器人專業涉及的知識面較廣,學生學習的專業知識較多。在一般的教學過程中,會出現課程與課程之間關聯性不足的問題,這會導致學生在學習完成不同課程之后,梳理不清楚每門課程之間的關系,更談不上對知識的應用能力,甚至有的學生會感到“迷茫”,認為學的某門課程與專業關聯性不大,造成學生不能主動地進行學習的問題。
二、課程教學改革探索
(一)校企合作,將相關課程進行有機融合
機器人專業的主要特征是多學科交叉融合[5]。在針對機器人專業課程建設時,應該始終貫徹這一特征。多學科交叉融合特征不是簡單的將原有眾多學科的培養目標相疊加,而是在滿足學校辦學定位的基礎上,將相關課程的內容進行相互交叉與滲透,必要時也要開設新的專業課程。在這個融合的過程中需要有產業及行業專家的深度參與,以準確地把握產業行業對人才的新需求。所以在課程建設的過程中,需要充分把握科技前沿,并結合市場的需求。本文以《微控制器原理及接口技術》為例來對校企合作進行說明。
對于《微控制器原理及接口技術》課程,其課程的主要特點是理論性知識交織復雜,對學生實踐能力要求較高。在理論課程的教學過程中,部分學生對很難聽懂,在實踐課程中,學生只會按照老師教的方法來“復制”實驗步驟,造成學生在學習該門課程之后,難以有更多的創新觀點,達不到“學以致用”的目的。大部分高校以單片機為載體來進行教學,有效地將理論與實踐相結合。但是,對于新興的機器人專業不能過分依賴教材,不能再以原有的知識體系架構來進行課程的講解,如何有效地將課程內容與機器人專業相結合是一個重要的問題[6]。這就需要有效地利用企業的資源和知識,來實現專業課程與企業需求的有機結合,實現理論知識與實踐能力的有效轉換,從而提高課程的產業價值,提高學生的綜合職業能力。所以,此門課程在授課時,在原有的課程技術知識上,將課程內容上升至機器人運動控制的高度,加入了運動控制基本原理與基本應用的知識。通過項目案例式的校企合作教學方式,讓學生在學習該門課程之后,除了掌握使用單片機控制小型機器人運動的知識外,也使學生掌握了如何使用運動控制器來控制工業機器人的運動。為了更好地達到滿足企業“定制化”人才的目標,授課教師會在課程實踐中加入了企業項目實訓,通過“項目式”的訓練,強化了學生的知識。
(二)強化實踐環節,將各學科進行交叉
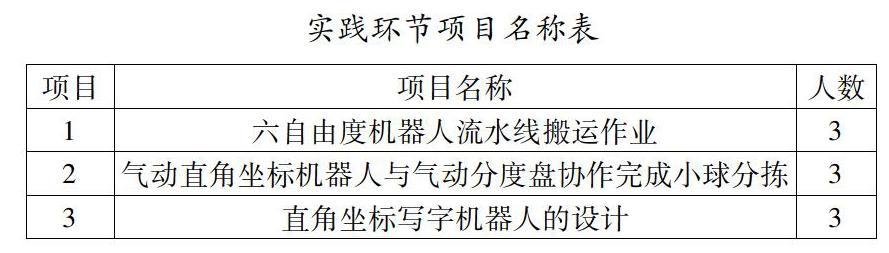
授課教師可以通過不同的項目設計,將機器人相關的各項課程進行有效的融合,一方面使學生更好地掌握課程之間的關聯,另一方面教師可以以項目任務的完成情況作為知識的掌握情況反饋。同時在整個實踐過程中,鍛煉學生的實際開發、項目管理及團隊合作能力,以實現應用型、復合型人才的培養目標。以《機器人運動控制系統設計與應用》課程為例,部分項目設計如下表所示。
六自由度機器人流水線搬運作業項目,使用兩臺六自由度機器人、傳送帶、PLC控制器傳感器等完成機器人流水線搬運作業。該項目結合機器人編程,控制器程序設計,傳感器應用等課程相關知識,把機器人專業的基礎與核心課程知識融入到實訓項目中去,從而提升學生的應用實踐能力。
氣動直角坐標機器人與氣動分度盤協作完成小球分揀項目,是利用氣缸、氣動分度盤、機器視覺(相機)、機器人通信技術、光電傳感器等完成不同顏色小球的分揀動作。該項目將氣動知識融入到機器人系統設計中去,從而構建從實物動作到理論知識傳授的教學模式。
直角坐標寫字機器人的設計項目,通過機械原理與設計、電機及驅動技術、傳感器等原理性知識讓學生完成直角坐標機器人硬件的設計與模型搭建。在此基礎上,利用運動控制器完成直角坐標機器人的控制系統設計,實現機器人軟硬件的設計,進一步加深學生對運動控制系統設計的步驟。
(三)完善教學方法,優化考核方式
隨著科技及網絡技術的發展,傳統的教學方式已經不再適用新興專業的課堂,單單采用“多媒體+視頻”等教學方式,已經不能較好的提升學生的學習興趣,這就需要根據機器人專業不同的課程特點,完善現有的教學方法,引導學生主動的去學習。對于機器人專業課程特點,可以采用項目、任務驅動式、“關聯”教學方法,將課程中的知識點劃分為不用的模塊項目,以引導學生進行有效的學習。在設計時,要注意設計的項目與任務和機器人專業內的其他課程知識的關聯性。如,軟件技術課程在設計[7]時可以將機器人學、微控制器原理、電機驅動中的插補、PID算法等知識點以項目的形式進行驅動教學。同時,也可以根據以企業生產制造實際案例來對任務或項目進行設計,使學生在學習專業知識的同時,也掌握市場最新案例。
課程考核改革是課程改革的重要部分[8]。機器人專業不僅僅要求學生掌握過硬的理論知識,還要求學生有較強的動手能力,因此僅僅采用傳統的筆試考核方式已不再合適。機器人專業的考核應該采用多樣化方法,如將課程答辯、項目、階段測驗、企業考核、創新設計、課堂表現等納入課程考核,作為課程考核的一部分,同時在考核過程中也應該注重過程化考核,通過過程化考核的方法,可以提高學生在整個課程學習的主動性與積極性。
(四)賽—教—學融合,建立第二學習課堂
人才培養不僅僅是讓學生學會課本上的知識,還應該注重學生在社會中、生活中解決各種實際問題的能力。為了更好地讓學生將學到的知識運用到實踐中去,除了課堂學習之外,可以利用諸多網絡教學平臺建立學生的第二課堂。在第二課堂中,通過開展各種科技制作、創新項目等比賽活動,讓學生將理論、實踐、創新相結合,以此來培養學生的實踐能力、創新設計能力。學生可以依據自己的興趣,結合當前社會及生活的需求去發明創作,去參加機器人大賽等相關比賽,在比賽中更好地提升自己的綜合能力。教師可以利用第二課堂,發現學生在學習過程中的知識及能力的不足,以便在后續的課程中采用一定的改進措施。也可以通過這種方式,發現學生的興趣,掌握學生愛聽、想聽的知識點,并結合課程的重點,不斷地對課程進行優化。
三、結論
在智能制造背景下,傳統的授課方式以及授課內容已經不能滿足制造智能化市場的發展,需要不斷地對課程內容以及授課方式進行革新。本文以機器人工程專業為例,討論了該專業目前的課程授課現狀,在此基礎上提出了一些課程改革的建議。通過上述課程改革方式,筆者對所教授的課程進行了改革,采用校企合作的方式進行授課,取得了良好的效果,如學生上課的積極性明顯提升,尤其是在與校企合作的實踐環節,學生的自信心明顯加強。雖然課程改革取得了一定的成績,但是在教學的過程中,還需要不斷地進行探索,以尋找更好的授課方法。
參考文獻:
[1]謝橋.智能制造時代工業機器人的應用前景研究[J].科技經濟導刊,2019,27(03):36-37.
[2]王帥,吳成東,賈子熙,王斐.面向新工科的機器人工程專業創新人才培養模式探索[J].教育教學論壇,2020(14):52-54.
[3]許文燕.智能制造背景下高職院校《工業機器人技術應用》課程改革與探索[J].南方農機,2019,50(23):166-167.
[4]郭金妹,陳磊,汪賽.基于OBE理念下工業機器人技術專業人才培養模式的構建與研究[J].教育現代化,2019,6(62):38-40+59.
[5]林健.多學科交叉融合的新生工科專業建設[J].高等工程教育研究,2018(1):32-45.
[6]萬琴,吳迪,林國漢.“新工科”背景下的機器人工程專業教學研究[J].科技創新導報,2018,15(30):132-133+135.
[7]馬策,尹斌,李秀娟,盧文濤.以構建專業知識體系為特色的教學模型探索與實踐研究[J].教育現代化,2019,6(18):115-118.
[8]張浩軍,盧娜.以課程考核方法改革提升課程教學質量[J].當代教育實踐與教學研究,2018(04):74-75.
基金項目:本文系“洛陽理工學院教育教學研究項目”(項目編號:19JYYB-20、18JYZX-05、18JYZD-01)的研究成果
作者簡介:魯欣(1991— ),女,漢族,河南濮陽人,碩士,助教,洛陽理工學院機器人學院,主要研究方向:機器人技術與系統。
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 20:41:17
現代經濟信息(2016年19期)2016-10-20 19:38:06
現代經濟信息(2016年19期)2016-10-20 19:32:18
商業會計(2016年13期)2016-10-20 16:18:54
中國市場(2016年35期)2016-10-19 03:02:20
科技視界(2016年22期)2016-10-18 16:29:27
科學與財富(2016年28期)2016-10-14 23:17:06
科學與財富(2016年28期)2016-10-14 21:43:33
科學與財富(2016年28期)2016-10-14 05:59:11
科學與財富(2016年28期)2016-10-14 05:57:02