斷相故障下開(kāi)繞組永磁同步電機(jī)模型預(yù)測(cè)控制容錯(cuò)控制策略研究
2021-01-11 08:33:28陳文漢王銘澤
電工技術(shù)學(xué)報(bào) 2021年1期
陳文漢 孫 丹 王銘澤
斷相故障下開(kāi)繞組永磁同步電機(jī)模型預(yù)測(cè)控制容錯(cuò)控制策略研究
陳文漢 孫 丹 王銘澤
(浙江大學(xué)電氣工程學(xué)院 杭州 310027)
共直流母線型開(kāi)繞組永磁同步電機(jī)系統(tǒng)由于雙逆變器供電且存在零序回路,具有一定的容錯(cuò)能力,但控制中需考慮零序電流的影響。然而當(dāng)永磁同步電機(jī)發(fā)生單相斷相故障后,原電機(jī)模型不再適用,若繼續(xù)沿用斷相前控制策略,將導(dǎo)致電機(jī)轉(zhuǎn)矩脈動(dòng)變大、控制性能變差。該文根據(jù)開(kāi)繞組永磁同步電機(jī)斷相后的系統(tǒng)特性,重新設(shè)計(jì)坐標(biāo)變換矩陣,得到新坐標(biāo)變換下的dq軸電機(jī)數(shù)學(xué)模型。新的轉(zhuǎn)矩方程表達(dá)簡(jiǎn)潔、轉(zhuǎn)矩控制方便,同時(shí)新的電壓方程也相互解耦,因此電流預(yù)測(cè)計(jì)算量小,且控制更加準(zhǔn)確。為提高電流控制性能,斷相前后均采用三矢量模型預(yù)測(cè)控制策略。考慮到斷相后的基本電壓矢量將發(fā)生變化,重新構(gòu)建了斷相系統(tǒng)拓?fù)湎滦碌碾妷菏噶科矫娌⒒谛碌幕倦妷菏噶坑?jì)算電壓矢量占空比。實(shí)驗(yàn)結(jié)果證明了所提方法的有效性和優(yōu)越性。
開(kāi)繞組永磁同步電機(jī) 模型預(yù)測(cè)控制 斷相故障 容錯(cuò)控制
0 引言
永磁同步電機(jī)(Permanent MagnetSynchronous Machine, PMSM)具有高效率、高功率密度等優(yōu)點(diǎn),被廣泛應(yīng)用于軍工、國(guó)防、現(xiàn)代工業(yè)中[1-2]。然而,在一些惡劣的工作環(huán)境下,電機(jī)會(huì)出現(xiàn)多種故障。其中,由繞組端部斷線、供電不穩(wěn)等問(wèn)題造成的電機(jī)斷相是最常見(jiàn)的故障之一[3-4]。一旦電機(jī)單相繞組斷開(kāi),三相電流不再對(duì)稱(chēng),若不改變控制策略會(huì)引起轉(zhuǎn)矩脈動(dòng)增大,控制性能下降,甚至危及系統(tǒng)安全,因此必須采用合適的容錯(cuò)控制策略[5-6]。
三相電機(jī)斷相后系統(tǒng)僅剩單個(gè)控制自由度,無(wú)法同時(shí)控制兩相電流。因此若想保證電機(jī)穩(wěn)定運(yùn)行,需將電機(jī)中性點(diǎn)接至一新引入的橋臂形成四橋臂拓?fù)浣Y(jié)構(gòu),以增加電流控制自由度,實(shí)現(xiàn)對(duì)剩余兩相電流的有效控制[6-7]。共直流母線開(kāi)繞組(Open Winding, OW)PMSM系統(tǒng)由于采用雙逆變器供電并存在零序回路,斷相后無(wú)需改變系統(tǒng)拓?fù)浼纯蓪?shí)現(xiàn)容錯(cuò)控制。除容錯(cuò)能力外,OW-PMSM系統(tǒng)還具有多電平、控制靈活等優(yōu)點(diǎn)[8-9]。但由于OW-PMSM系統(tǒng)存在零序回路,在正常運(yùn)行時(shí)必須考慮零序電流和三次諧波磁鏈的影響。
在共直流母線OW-PMSM系統(tǒng)中采用矢量控制(Vector Control, VC)和直接轉(zhuǎn)矩控制(Direct Torque Control, DTC)時(shí),通常需加入一個(gè)額外控制環(huán)來(lái)實(shí)現(xiàn)零序電流的控制[10-11],增加了控制系統(tǒng)復(fù)雜度。模型預(yù)測(cè)控制(Model Predictive Control, MPC)由于可以實(shí)現(xiàn)多變量的靈活控制而在近年得到了廣泛關(guān)注[12-13]。在共直流母線OW-PMSM系統(tǒng)中,只需修改MPC的代價(jià)函數(shù)即可靈活方便地實(shí)現(xiàn)對(duì)零序回路的控制[14]。然而故障后由于電機(jī)系統(tǒng)結(jié)構(gòu)發(fā)生變化,電機(jī)系統(tǒng)模型和系統(tǒng)參數(shù)將發(fā)生變化,若繼續(xù)沿用斷相前的MPC策略會(huì)嚴(yán)重影響性能,此時(shí)電機(jī)系統(tǒng)需要重新建模并修改控制策略,而此內(nèi)容卻鮮有文獻(xiàn)研究。
三相電機(jī)出現(xiàn)斷相故障后,為保證轉(zhuǎn)速穩(wěn)定,恒定的輸出轉(zhuǎn)矩是最重要的控制目標(biāo),因此剩余兩相電流的分配必須做出相應(yīng)的改變[15]。針對(duì)三相電機(jī)系統(tǒng),由于可獲得斷相后電流的瞬時(shí)值,因此文獻(xiàn)[8,15]采用滯環(huán)控制器來(lái)實(shí)現(xiàn)兩相電流的獨(dú)立控制。然而這種控制方法開(kāi)關(guān)頻率不固定,且由于滯環(huán)控制器的固有缺陷,無(wú)法保證電流控制的精度。
為提高控制性能,文獻(xiàn)[16]采用基于傳統(tǒng)坐標(biāo)變換的改進(jìn)矢量控制策略對(duì)斷相OW-PMSM系統(tǒng)進(jìn)行控制,抑制了斷相故障下d、q軸電流的諧波分量。然而由于系統(tǒng)建模不準(zhǔn)確,轉(zhuǎn)矩的表達(dá)式與電角度有關(guān),同時(shí)dq軸電壓方程并未實(shí)現(xiàn)完全解耦,因此轉(zhuǎn)矩脈動(dòng)抑制效果并不理想。
為進(jìn)一步提高系統(tǒng)的容錯(cuò)性能,有學(xué)者提出在斷相后采用新的坐標(biāo)變換進(jìn)行重新建模,并采用與新模型相對(duì)應(yīng)的控制策略實(shí)現(xiàn)斷相后的解耦控制[17-18]。文獻(xiàn)[17]以斷相前后d、q軸電流不變?yōu)闃?biāo)準(zhǔn)得到新的坐標(biāo)變換,以保證斷相瞬間的轉(zhuǎn)矩不變,但無(wú)法保證后續(xù)轉(zhuǎn)矩脈動(dòng)的抑制效果。文獻(xiàn)[18]構(gòu)造了三個(gè)新的坐標(biāo)變換并推導(dǎo)了內(nèi)嵌式PMSM斷相后的數(shù)學(xué)模型,但忽略了斷相后必須考慮的三次諧波磁鏈的影響,且坐標(biāo)變換不直接,較為繁瑣。
文獻(xiàn)[13]根據(jù)表貼式PMSM斷相前后電機(jī)數(shù)學(xué)模型的特點(diǎn),設(shè)計(jì)了斷相后的有限集MPC。然而此方法只能應(yīng)用于表貼式PMSM,且單矢量MPC具有轉(zhuǎn)矩脈動(dòng)大、電流諧波大等問(wèn)題。文獻(xiàn)[19]采用MPC預(yù)測(cè)abc三相電流,但是未經(jīng)坐標(biāo)變換的abc坐標(biāo)系電機(jī)數(shù)學(xué)模型較為復(fù)雜,增加了預(yù)測(cè)計(jì)算的復(fù)雜度,且依舊無(wú)法避免單矢量MPC帶來(lái)的問(wèn)題。
本文根據(jù)斷相后OW-PMSM數(shù)學(xué)模型,設(shè)計(jì)新型坐標(biāo)變換矩陣,得到共直流母線OW-PMSM故障后的dq軸電壓解耦方程和簡(jiǎn)潔的轉(zhuǎn)矩方程。基于新的轉(zhuǎn)矩方程,進(jìn)一步修正q軸電流參考值以減小三次諧波磁鏈產(chǎn)生的轉(zhuǎn)矩脈動(dòng)。然后根據(jù)斷相后系統(tǒng)拓?fù)渲匦聵?gòu)建基本電壓矢量,采用三矢量MPC來(lái)提高電流控制性能。后續(xù)電壓矢量占空比和開(kāi)關(guān)信號(hào)通過(guò)新電壓矢量平面快速計(jì)算得到。實(shí)驗(yàn)結(jié)果證明了所提方法的可行性和有效性。
1 共直流開(kāi)繞組永磁同步電機(jī)數(shù)學(xué)模型
1.1 共直流開(kāi)繞組系統(tǒng)拓?fù)浣Y(jié)構(gòu)
本文研究的共直流母線OW-PMSM系統(tǒng)如圖1所示,圖中PMSM的繞組端部被打開(kāi),由兩個(gè)逆變器(INV1和INV2)通過(guò)一個(gè)直流電壓源dc供電。
由INV1和INV2提供的電壓可表示為

圖1 共直流母線開(kāi)繞組永磁同步電機(jī)系統(tǒng)拓?fù)?/p>
式中,a1、b1、c1和a2、b2、c3分別為INV1和INV2提供的定子三相電壓;a1、b1、c1和a2、b2、c2分別為INV1和INV2的開(kāi)關(guān)信號(hào)。=1表示上橋臂開(kāi)關(guān)打開(kāi),下橋臂開(kāi)關(guān)關(guān)閉;=0反之。
1.2 開(kāi)繞組永磁同步電機(jī)數(shù)學(xué)模型
假設(shè)PMSM三相繞組對(duì)稱(chēng),在OW-PMSM系統(tǒng)三相穩(wěn)定運(yùn)行時(shí)三相繞組電壓、磁鏈方程可寫(xiě)為

式中,abc、abc分別為三相繞組相電壓和相電流;sabc為三相繞組定子磁鏈;s為繞組電阻;abc為電感矩陣;rabc和r3abc分別為轉(zhuǎn)子磁鏈的基波分量和三次諧波分量。



通過(guò)虛位移法[16]可得到PMSM轉(zhuǎn)矩方程為

式中,為極對(duì)數(shù)。
電機(jī)三相正常運(yùn)行時(shí)常用abc-dq0坐標(biāo)變換矩陣為

結(jié)合式(2)和式(7),dq0坐標(biāo)系下的電壓和磁鏈方程可表示為

此時(shí),應(yīng)用式(8)可以實(shí)現(xiàn)dq0軸下的電流預(yù)測(cè)計(jì)算。且此時(shí)式(8)中abc-1為對(duì)角矩陣,因此dq0軸上的電流預(yù)測(cè)更加準(zhǔn)確且計(jì)算更加簡(jiǎn)單。
利用式(7),可得dq0坐標(biāo)系下的轉(zhuǎn)矩方程為

可見(jiàn),三次諧波磁鏈分量會(huì)與零軸電流作用產(chǎn)生脈動(dòng)電磁轉(zhuǎn)矩,因此控制中需抑制零軸電流以減少轉(zhuǎn)矩脈動(dòng)[14]。
2 斷相后坐標(biāo)變換矩陣的設(shè)計(jì)
2.1 采用常規(guī)坐標(biāo)變換
當(dāng)PMSM發(fā)生斷相故障(以a相為例),坐標(biāo)變換需修改。文獻(xiàn)[16]直接將矩陣的bc相分量作為新的變換矩陣


2.2 斷相后(bc-αβ)新型坐標(biāo)變換矩陣
假設(shè)電機(jī)斷相前三相電流對(duì)稱(chēng)
式中,為電流矢量和q軸的夾角。


將a相位置定向?yàn)棣凛S位置,則新的αβ坐標(biāo)系位置如圖2所示。
圖2 a相斷相后bc-αβ新坐標(biāo)系
Fig.2 bc-αβ coordinate after phase ais open
由圖2可得故障后(bc-αβ)坐標(biāo)變換矩陣為

2.3 斷相后轉(zhuǎn)矩方程
故障后電磁轉(zhuǎn)矩是式(6)的兩相形式,將新的電流旋轉(zhuǎn)坐標(biāo)變換矩陣(αβ-dq)記為i,再將故障后的轉(zhuǎn)矩轉(zhuǎn)化為dq軸形式,并進(jìn)一步分成三部分,即

式中,e1為永磁基波磁鏈產(chǎn)生的轉(zhuǎn)矩;e2為永磁三次諧波磁鏈產(chǎn)生的轉(zhuǎn)矩;e3為磁阻轉(zhuǎn)矩。
為得到與式(9)類(lèi)似的簡(jiǎn)明轉(zhuǎn)矩表達(dá)式,將i逆矩陣的轉(zhuǎn)置設(shè)為

式中,1234為待定矩陣系數(shù)。


令e3=1.5(dq)dq,可得

因此,變換矩陣i可寫(xiě)為

將式(18)代入式(14)并進(jìn)一步推導(dǎo)后,可得dq軸電磁轉(zhuǎn)矩為
與式(9)對(duì)比可知,故障后的電磁轉(zhuǎn)矩不再包含零軸分量,但三次諧波磁鏈將與dq軸電流相互作用形成脈動(dòng)轉(zhuǎn)矩。因此在系統(tǒng)發(fā)生斷相故障后,無(wú)法通過(guò)抑制零軸電流來(lái)降低轉(zhuǎn)矩脈動(dòng),需要對(duì)故障后系統(tǒng)的控制策略進(jìn)行進(jìn)一步修改。
2.4 斷相后解耦電壓方程
為保證電流控制的準(zhǔn)確性,dq軸電壓方程需解耦,即dq電感矩陣為對(duì)角陣。然而i作為電壓的旋轉(zhuǎn)變換矩陣時(shí),無(wú)法得到解耦電感矩陣。為優(yōu)化系統(tǒng)控制性能,需為電壓方程設(shè)計(jì)不同的旋轉(zhuǎn)變換矩陣v,新的電壓旋轉(zhuǎn)變換矩陣定義為

式中,1、2、3、4為待定矩陣系數(shù)。則dq軸下的電機(jī)電壓方程可寫(xiě)為
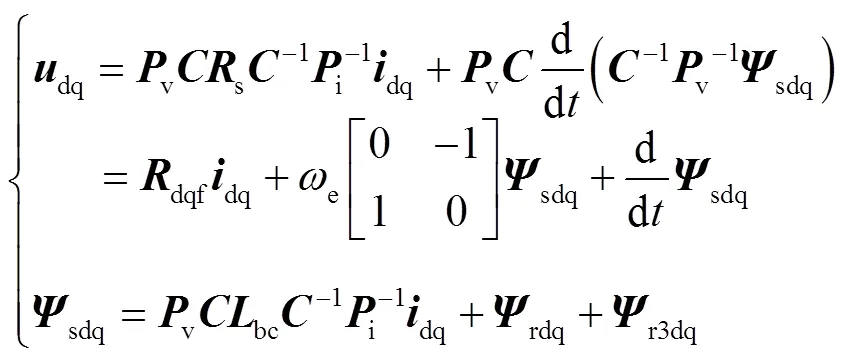
由式(21)可知,坐標(biāo)變換后的電感矩陣為

將v、i、矩陣代入式(22)中,可得

由于PMSM的漏感和dq軸電感相比可忽略不計(jì),忽略1中的漏感后,令dqf為對(duì)角陣,可得


因此電壓旋轉(zhuǎn)坐標(biāo)變換矩陣為
將式(26)代入式(21)中,可得使用新坐標(biāo)變換后的dq坐標(biāo)系下的斷相電機(jī)電壓方程為
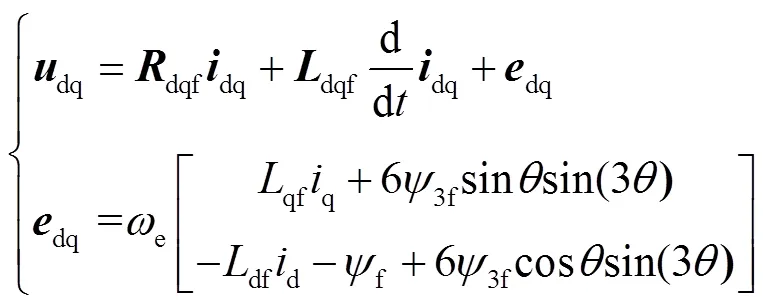

由式(28)可知,利用v可得到相互解耦的電機(jī)dq軸電壓方程,dq軸電感矩陣與電角度無(wú)關(guān)。同時(shí)新的電壓方程保持了斷相前的簡(jiǎn)潔形式。
3 三矢量模型預(yù)測(cè)控制
3.1 斷相后轉(zhuǎn)矩脈動(dòng)抑制
為簡(jiǎn)化控制過(guò)程,本文采用d=0的控制方式,則斷相故障后的轉(zhuǎn)矩表達(dá)式(19)可簡(jiǎn)化為

為了抑制轉(zhuǎn)矩脈動(dòng),應(yīng)根據(jù)式(30)將dq軸電流參考值設(shè)置為
q軸電流參考值可進(jìn)一步表示為

從式(31)可看出,q軸參考電流不再是直流量,而是一個(gè)包含二次和四次諧波分量的交流量。
若式(30)作為q軸電流參考值,則bc相電流不再是正弦的。如需得到正弦電流,則dq軸電流參考值可選擇為式(32),然而此時(shí)不能保證轉(zhuǎn)矩脈動(dòng)最小。

3.2 模型預(yù)測(cè)控制
經(jīng)過(guò)新的坐標(biāo)變換后,dq軸電壓方程相互解耦。其形式簡(jiǎn)單,電感矩陣也已常數(shù)化,從而簡(jiǎn)化了整個(gè)預(yù)測(cè)計(jì)算。
用一階前向歐拉離散法將式(27)離散化,得到OW-PMSM離散狀態(tài)方程為

由式(33)可以看出,在階系統(tǒng)狀態(tài)下,預(yù)測(cè)電流+1由電壓信號(hào)控制,由于實(shí)際控制系統(tǒng)會(huì)產(chǎn)生一拍延時(shí),在考慮一拍補(bǔ)償[16]后,預(yù)測(cè)電流+2可進(jìn)一步表示為

根據(jù)無(wú)差拍MPC思想,即在下一時(shí)刻電流矢量的預(yù)測(cè)值和電流矢量參考值相同。將式(34)中的+2時(shí)刻電流值改為電流參考值,則得到+1時(shí)刻電壓矢量的參考值為

3.3 斷相后三矢量占空比計(jì)算
由于斷相后OW-PMSM系統(tǒng)只有四個(gè)橋臂工作,b、c相相電壓可表示成

由于S1-S2(=b,c)取值范圍為{1,0,-1},因此斷相后雙逆變器系統(tǒng)能夠產(chǎn)生9個(gè)不同的電壓矢量。bc坐標(biāo)下電壓矢量通過(guò)坐標(biāo)變換-1能夠得到9個(gè)αβ坐標(biāo)系下的基本電壓矢量為

式中,b=b1-b2;c=c1-c2。則此時(shí)基本電壓矢量可通過(guò)b、c表示為=[bc]。
9個(gè)基本電壓矢量在αβ平面上的位置如圖3所示,由于7與8超出了線性調(diào)制范圍,所以在斷相后的調(diào)制中,可只考慮0~6共7個(gè)電壓矢量。

圖3 斷相后電壓矢量平面
參考電壓矢量可由三矢量合成并表示為



根據(jù)u的大小可判斷參考電壓矢量所在的電壓矢量平面扇區(qū)。假設(shè)參考電壓矢量位于扇區(qū)Ⅱ,則此時(shí)選擇的有效電壓矢量為1、2,參考電壓矢量在扇區(qū)Ⅱ的電壓矢量合成。

圖4 參考電壓矢量在扇區(qū)Ⅱ的電壓矢量合成
由正弦定理可得

由式(40)及叉乘的定義可得1、2、0的作用時(shí)間分別為

當(dāng)參考電壓矢量在其他扇區(qū)時(shí),可以通過(guò)類(lèi)似的方法計(jì)算各個(gè)電壓矢量的占空比。在計(jì)算得到三矢量的占空比后,需選取零矢量插入兩有效矢量之間,零矢量的選取以系統(tǒng)開(kāi)關(guān)次數(shù)最小為原則。為簡(jiǎn)化開(kāi)關(guān)選擇過(guò)程,除了非零矢量,當(dāng)S1-S2=0時(shí),總是選擇開(kāi)關(guān)狀態(tài){1, 1}。以1與2為例,其對(duì)應(yīng)到b1、b2、c1、c2上的開(kāi)關(guān)狀態(tài)上為:{0,1,1,1},{0,1,1,0}。觀察到c1相一直是開(kāi)通的,為了保持c1在一個(gè)開(kāi)關(guān)周期內(nèi)不動(dòng)作,則有{c1,c2}={1,1},進(jìn)一步選擇{b1,b2}={1,1}。此時(shí)一個(gè)周期內(nèi)的開(kāi)關(guān)狀態(tài)如圖5所示。

圖5 開(kāi)關(guān)信號(hào)示意圖(電壓矢量為u1, u2, u0)
3.4 容錯(cuò)控制系統(tǒng)
本文所研究的OW-PMSM系統(tǒng)MPC容錯(cuò)策略框圖如圖6所示,整個(gè)框圖包括斷相故障發(fā)生前后的控制部分。當(dāng)OW-PMSM正常工作時(shí),采用文獻(xiàn)[14]中的MPC策略得到參考電壓并進(jìn)一步采用文獻(xiàn)[20]提出的三相調(diào)制方法;當(dāng)故障發(fā)生后,采用本文所提的MPC容錯(cuò)策略。斷相故障后,故障相的電流將衰減到0。在一個(gè)控制周期內(nèi),如果一個(gè)相電流的采樣值滿足式(42),則計(jì)數(shù)器加1。當(dāng)計(jì)數(shù)器值達(dá)到設(shè)定的閾值,故障檢測(cè)程序便可認(rèn)為故障已發(fā)生,然后切換至故障后控制方法。本文計(jì)數(shù)器設(shè)置為1 000,開(kāi)關(guān)周期為0.1ms,因此切換控制策略時(shí)間間隔可計(jì)算為1000×0.1ms=0.1s。

式中,為大于0的量,本文取0.3。

圖6 共直流母線開(kāi)繞組永磁同步電機(jī)系統(tǒng)容錯(cuò)控制框圖
4 實(shí)驗(yàn)驗(yàn)證
本文通過(guò)實(shí)驗(yàn)研究比較了傳統(tǒng)變換矩陣的容錯(cuò)策略[16](策略Ⅰ),采用新型變換矩陣且不考慮三次諧波磁鏈的MPC容錯(cuò)策略(策略Ⅱ)和考慮三次磁鏈的MPC容錯(cuò)策略(策略Ⅲ)。實(shí)驗(yàn)中直流母線電壓dc=90V,PMSM參數(shù)s=2Ω,d=8mH,q=12.7mH,f=0.48Wb,3f=0.025Wb,極對(duì)數(shù)=3,系統(tǒng)采樣周期為100μs。實(shí)驗(yàn)結(jié)果如圖7~圖9所示。


圖8 轉(zhuǎn)速?gòu)?50r/min到400 r/min的動(dòng)態(tài)性能實(shí)驗(yàn)結(jié)果
4.1 斷相后穩(wěn)態(tài)性能
圖7比較了三種策略在故障后參考轉(zhuǎn)速設(shè)定為250r/min,負(fù)載轉(zhuǎn)矩為6N×m時(shí)的穩(wěn)態(tài)性能和電流FFT分析。從圖7a左圖可看出剩余兩相電流畸變,轉(zhuǎn)矩脈動(dòng)明顯增大,這是因?yàn)閭鹘y(tǒng)坐標(biāo)變換后得到的數(shù)學(xué)模型不精確導(dǎo)致的。從圖7b左圖中可看出,與策略Ⅰ相比,轉(zhuǎn)矩脈動(dòng)從3.5N·m減小到2.8N·m,轉(zhuǎn)矩脈動(dòng)沒(méi)有明顯降低。這進(jìn)一步表明,坐標(biāo)變換矩陣對(duì)剩余兩相電流的正弦度有影響,三次諧波磁鏈與轉(zhuǎn)矩脈動(dòng)有關(guān)。圖7c左圖為新坐標(biāo)變換下考慮三次諧波磁鏈的結(jié)果,此時(shí)轉(zhuǎn)矩脈動(dòng)降低到1.5N×m,可看出該方法能有效抑制轉(zhuǎn)矩脈動(dòng)。從圖7a和圖7b可看到,在采用本文提出的坐標(biāo)變換建模后,總諧波失真(Total Harmonic Distortion,THD)從11.2%降低到6.21%,定子電流的正弦性得到很大的改善。在考慮三次諧波磁鏈后,由于二次和四次諧波分量被注入到q軸電流基準(zhǔn)中用以減少轉(zhuǎn)矩脈動(dòng),因此bc相電流中含有3次諧波和5次諧波,從圖7c看出,電流不再完全正弦,THD增加到14.51%,但是轉(zhuǎn)矩脈動(dòng)得到了有效的抑制。
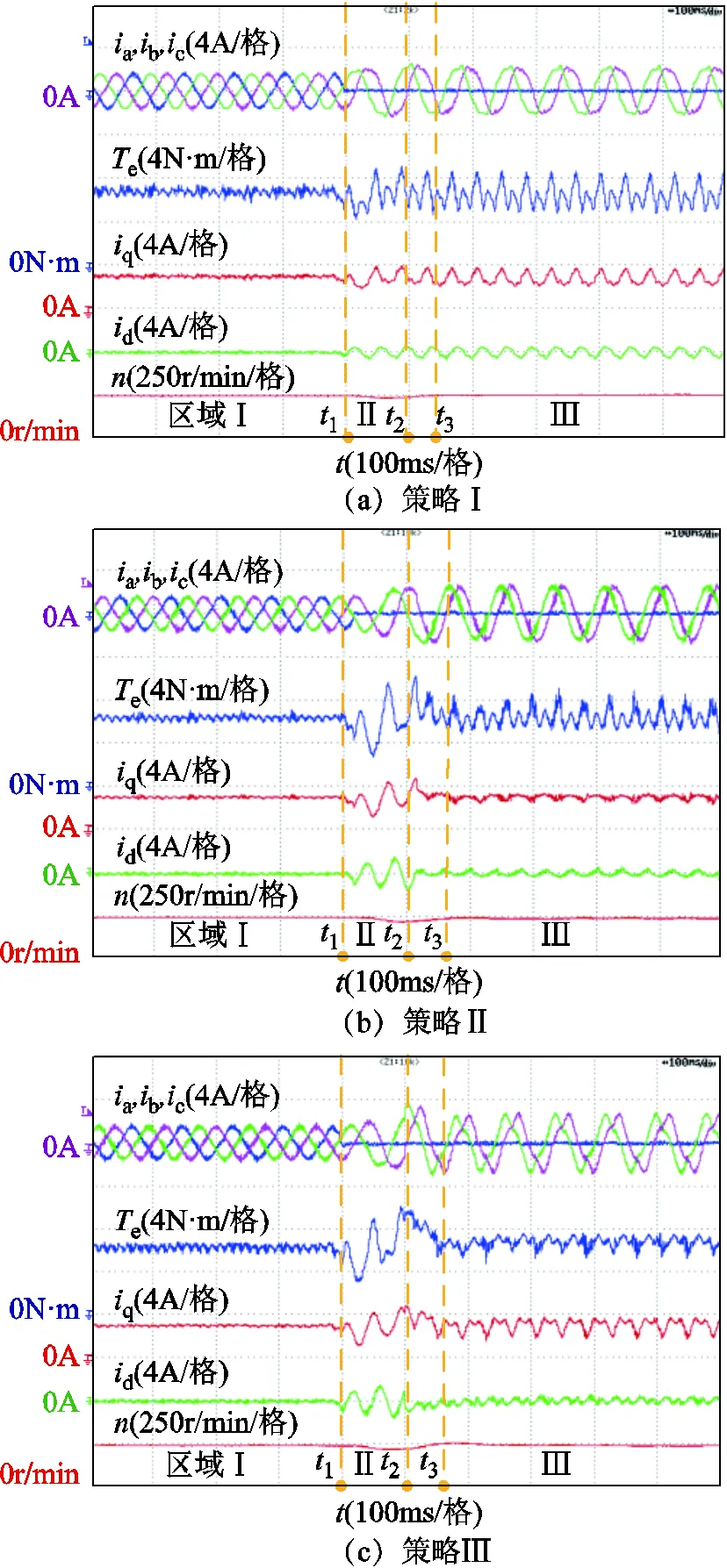
圖9 斷相故障時(shí)的動(dòng)態(tài)性能實(shí)驗(yàn)結(jié)果
4.2 斷相后暫態(tài)性能
圖8比較了三種策略在6N×m負(fù)載轉(zhuǎn)矩下參考轉(zhuǎn)速?gòu)?50r/min變?yōu)?00r/min的動(dòng)態(tài)性能。可以看出,策略Ⅰ的暫態(tài)過(guò)程為0.25s且存在超調(diào)。而策略Ⅱ和策略Ⅲ暫態(tài)過(guò)程為0.3s沒(méi)有超調(diào)。這是因?yàn)椴呗寓竦碾姍C(jī)建模不準(zhǔn)確,使得轉(zhuǎn)速控制性能下降,出現(xiàn)超調(diào)現(xiàn)象。此時(shí)暫態(tài)過(guò)程的輸出轉(zhuǎn)矩要大于轉(zhuǎn)矩限幅值,因此其加速過(guò)程相比另外兩種策略要更快。然而暫態(tài)過(guò)程轉(zhuǎn)矩超出PMSM的限幅轉(zhuǎn)矩有可能會(huì)損害系統(tǒng)的安全性,因此必須采用更精準(zhǔn)的轉(zhuǎn)矩控制策略。從圖8b可以看出,雖然策略Ⅱ中電機(jī)建模準(zhǔn)確,然而由于未采用轉(zhuǎn)矩脈動(dòng)抑制,因此轉(zhuǎn)矩也會(huì)周期性地超過(guò)轉(zhuǎn)矩限幅值。而加入了轉(zhuǎn)矩脈動(dòng)抑制的策略Ⅲ暫態(tài)過(guò)程中轉(zhuǎn)矩依然平穩(wěn),因此從系統(tǒng)安全上考慮,策略Ⅲ相比于另外兩種策略更好。
4.3 容錯(cuò)控制切換過(guò)程
圖9展示了斷相故障發(fā)生時(shí)的控制策略切換過(guò)程。首先,系統(tǒng)運(yùn)行在三相運(yùn)行狀態(tài)(區(qū)域Ⅰ),然后強(qiáng)制斷開(kāi)a相。在1~2(區(qū)域Ⅱ)的0.1s切換過(guò)程中,a相電流的采樣信號(hào)雖然為零,但此時(shí)故障判斷模塊還不能確定a相已發(fā)生斷相故障,因此仍然采用三相正常運(yùn)行時(shí)的控制方案。在故障檢測(cè)模塊檢測(cè)到a相發(fā)生斷相故障后,切換至不同的容錯(cuò)控制策略(區(qū)域Ⅲ)。
由圖9可知,三種策略都能順利地從正常運(yùn)行狀態(tài)切換到斷相故障運(yùn)行狀態(tài)。由于策略Ⅰ斷相前后的坐標(biāo)變換保持不變,因此與策略Ⅱ和策略Ⅲ相比,策略Ⅰ的瞬態(tài)過(guò)程(2~3)最短為0.04s。而策略Ⅱ和策略Ⅲ兩種策略的坐標(biāo)變換和控制結(jié)構(gòu)相同,所以它們的暫態(tài)過(guò)程時(shí)間均為0.06s。
從圖9a和圖9b可以發(fā)現(xiàn),與切換過(guò)程(區(qū)域Ⅱ)中的情況相比,區(qū)域Ⅲ中的轉(zhuǎn)矩脈動(dòng)都有相應(yīng)的減小,并且策略Ⅱ優(yōu)于策略Ⅰ,但是轉(zhuǎn)矩脈動(dòng)抑制都有限。在考慮了三次諧波磁鏈后,從圖9c可發(fā)現(xiàn),和其他兩種策略相比,策略Ⅲ的轉(zhuǎn)矩脈動(dòng)進(jìn)一步減小,電機(jī)轉(zhuǎn)速波形最為平滑。
4.4 三種控制策略性能比較
表1列出了三種控制策略的控制性能對(duì)比。分析其穩(wěn)態(tài)性能,策略Ⅱ有最低的THD,策略Ⅲ有最低的轉(zhuǎn)矩脈動(dòng),但由于注入了諧波電流來(lái)抑制轉(zhuǎn)矩脈動(dòng),其電流諧波THD含量最大。策略Ⅱ和Ⅲ有相似的動(dòng)態(tài)性能,基本無(wú)超調(diào)。但由于轉(zhuǎn)矩的限幅更加精確,其動(dòng)態(tài)過(guò)程相比于策略Ⅰ更長(zhǎng)。考慮斷相前后的切換過(guò)程,策略Ⅱ和策略Ⅲ要比策略Ⅰ切換時(shí)間更長(zhǎng),這是因?yàn)樽鴺?biāo)變換變化導(dǎo)致控制結(jié)構(gòu)改變而引起的。可以看出,采用新型坐標(biāo)變換與后續(xù)的容錯(cuò)模型預(yù)測(cè)控制后,在保持動(dòng)態(tài)性能基本不變的情況下,策略Ⅱ和Ⅲ的穩(wěn)態(tài)性能有了很大的提升。在考慮三次諧波磁鏈的影響后,轉(zhuǎn)矩脈動(dòng)將被進(jìn)一步抑制。
表1 三種策略的性能比較

Tab.1 Comparisons of three methods’ performances
5 結(jié)論
本文提出了一種考慮三次諧波磁鏈的共直流母線型開(kāi)繞組永磁同步電動(dòng)機(jī)模型預(yù)測(cè)控制容錯(cuò)策略。根據(jù)斷相故障后系統(tǒng)狀態(tài)方程,重構(gòu)新的坐標(biāo)變換矩陣進(jìn)而得到了dq軸上的簡(jiǎn)潔轉(zhuǎn)矩表達(dá)式和相互解耦的電壓方程。新的dq軸電壓方程參數(shù)均為常數(shù),因此簡(jiǎn)化了三矢量模型預(yù)測(cè)計(jì)算過(guò)程。根據(jù)斷相后的系統(tǒng)開(kāi)關(guān)狀態(tài)和電壓矢量關(guān)系,重新構(gòu)建電壓矢量平面,快速得到了所作用電壓矢量的占空比和開(kāi)關(guān)狀態(tài)。實(shí)驗(yàn)結(jié)果驗(yàn)證了所提共直流母線型永磁同步電動(dòng)機(jī)系統(tǒng)容錯(cuò)控制策略對(duì)斷相后出現(xiàn)的諧波控制量具有良好的控制效果,實(shí)現(xiàn)了斷相后轉(zhuǎn)矩脈動(dòng)的有效抑制。
[1] Sun Yuanxiang, Li Zhen, Zhang Zhenbin. Hybrid predictive control with simple linear control based circulating current suppression for modular multilevel converters[J]. CES Transactions on Electrical Machines and Systems, 2019, 3(4): 335-341.
[2] 劉珅, 高琳. 永磁同步電機(jī)的改進(jìn)模型預(yù)測(cè)直接轉(zhuǎn)矩控制[J]. 電機(jī)與控制學(xué)報(bào), 2020, 24(1): 10-17. Liu Shen, Gao Lin. Improved model of predictive direct torque control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2020, 24(1): 10-17.
[3] 孟云平, 周新秀, 李紅, 等. 基于四橋臂拓?fù)涞挠来磐诫姍C(jī)斷相容錯(cuò)控制策略[J]. 電工技術(shù)學(xué)報(bào), 2019, 34(15): 3158-3166.Meng Yunping, Zhou Xinxiu, Li Hong, et al. Fault tolerant strategy of four-leg for permanent magnet synchronous motor in case of open circuit fault[J].Transactions of China Electrotechnical Society, 2019, 34(15): 3158-3166.
[4] 呂康飛, 董新偉, 劉麗麗, 等.考慮零序電流抑制的開(kāi)繞組永磁同步電機(jī)斷相故障下統(tǒng)一調(diào)制策略[J].電工技術(shù)學(xué)報(bào), 2020, 35(11): 2387-2395. Lü Kangfei, Dong Xinwei, Liu Lili, et al. The unified modulation scheme of open-end winding PMSM with common dc bus under the open-phase fault considering the suppression of zero-sequence current[J]. Transactions of China Electrotechnical Society, 2020, 35(11): 2387-2395.
[5] 方敏, 周新秀, 劉剛. 三相永磁同步電機(jī)斷相容錯(cuò)控制[J]. 電工技術(shù)學(xué)報(bào), 2018, 33(13): 2972-2981. Fang Min Zhou Xinxiu, Liu Gang. Fault-tolerant control strategy for three-phase permanent magnet synchronous motor in case of one phase open-circuit[J]. Transactions of China Electrotechnical Society, 2018, 33(13): 2972-2981.
[6] 彭忠, 鄭澤東, 劉自程, 等. 基于虛擬繞組和全階觀測(cè)器的五相感應(yīng)電機(jī)無(wú)速度傳感器容錯(cuò)控制策略[J]. 電工技術(shù)學(xué)報(bào), 2018, 33(21): 4949-4961. Peng Zhong, Zheng Zedong, Liu Zicheng, et al. A novel sensorless fault-tolerant control of five-phase induction machine using virtual winding and full-order observer[J]. Transactions of China Electrotechnical Society, 2018, 33(21): 4949-4961.
[7] Xu Jinquan, Zhang Boyi, Fang Hao, et al. Guaranteeing the fault transient performance of aerospace multiphase permanent magnet motor system: an adaptive robust speed control approach[J]. China Electrotechnical Society Transactions on Electrical Machines and Systems, 2020, 4(2): 114-122.
[8] Cheng Yifei, Sun Dan, ChenWenhan, et al. Model predictive current control for an open-winding pmsm system with a common DC bus in 3-D space[J]. IEEE Transactions on Power Electronics, 2020, 35(9): 9599-9609.
[9] 年珩, 阮晨輝, 何峪嵩, 等. 基于Z源逆變器的共直流母線開(kāi)繞組永磁同步電機(jī)系統(tǒng)控制策略[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2019, 39(18): 5509-5519, 5599. Nian Heng, Ruan Chenhui, He Yusong, et al. Control strategy for open-winding PMSM system with common DC bus based on Z-source inverters[J]. Proceedings of the CSEE, 2019,39(18): 5509-5519, 5599.
[10] Zhan Hanlin, Zhu Z Q, Milijana Odavic. Analysis and suppression of zero sequence circulating current in open winding PMSM drives with common DC bus[J]. IEEE Transactions on Industry Applications, 2017, 53(4): 3609-3620.
[11] Lin Xiaogang, Huang Wenxin, Jiang Wen, et al. Direct torque control for three-phase open-end winding PMSM with common DC bus based on duty ratio modulation[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 4216-4232.
[12] 秦艷忠, 閻彥, 陳煒, 等. 永磁同步電機(jī)參數(shù)誤差補(bǔ)償-三矢量模型預(yù)測(cè)電流控制[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(2): 255-265. Qin Yanzhong, Yan Yan, Chen Wei, et al. Three-vector-based model predictive current control for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 255-265.
[13] Wang Wei,Zhang Jinghao,Cheng Ming. Common model predictive control for permanent-magnet synchronous machine drives considering single-phase open-circuit fault[J]. IEEE Transactions on Power Electronics, 2017, 32(7): 5862-5872.
[14] Zhang Xiaoguang, Wang Keqin. Current prediction based zero sequence current suppression strategy for the semicontrolled open-winding PMSM generation system with a common DC bus[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6066-6076.
[15] Liu Tianhua, Fu Jen Ren, Lipo T A. A strategy for improving reliability of field-oriented controlled induction motor drives[J]. IEEE Transactions on Industry Applications, 1993, 29(5): 910-918.
[16] Hu Wei, Ruan Chenhui, Nian Heng, et al. Simplified modulation scheme for open-end winding PMSM system with common DC bus under open-phase fault based on circulating current suppression[J]. IEEE Transactions on Power Electronics, 2020, 35(1): 10-14.
[17] Zhou Xinxiu, Sun Jun, Li Haitao, et al. High performance three-phase PMSM open-phase fault-tolerant method based on reference frame transformation[J]. IEEE Transactions on Industrial Electronics, 2019, 66(10): 7571-7580.
[18] Gaeta A, Scelba G, Consoli A. Modeling and control of three-phase pmsms under open-phase fault[J]. IEEE Transactions on Industry Applications, 2013, 49(1): 74-83.
[19] Kiselev A, Catuogno G R, Kuznietsov A, et al. Finite-control-set MPC for open-phase fault-tolerant control of PM synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4444-4452.
[20] Hu Wei, Nian Heng, Sun Dan. Zero-sequence current suppression strategy with reduced switching frequency for open-end winding PMSM drives with common DC bus[J]. IEEE Transactions on Industrial Electronics, 2019, 66(10): 7613-7623.
Research on Fault-Tolerance Strategy Based on Model Predictive Control for Open-Winding PMSM System under Open-Phase Fault
Chen Wenhan Sun Dan Wang Mingze
(College of Electrical Engineering Zhejiang University Hangzhou 310027 China)
Due to characteristic of dual-inverter power supplying and existence of zero sequence loop, the open wingding permanent magnet synchronous machine (OW-PMSM) system with common DC bus has certain fault tolerance ability. And the influence of zero sequence current should be considered because of the zero sequence loop. However, when open phase fault occurs, the original mathematical model is no longer applicable. Thus, the torque ripple will become larger and the control performance will worse if the control strategy before fault occurrence is adopted. In this paper, according to the characteristics of OW-PMSM, the coordinate transformation was redesigned and a new mathematical model in dq-axis was obtained. The new torque equation has concise form which makes the torque control more convenient. At meantime, the dq-axis voltage equation is decoupled based on new coordinate transformation so that the calculation burden is reduced and control performance is improved. In order to further improve the current control performance, three vector based model predictive control (MPC) strategy was adopted. Then the voltage vector plane after open phase fault is reconstructed and the duty cycle can be calculated according to the new basic voltage vectors. The experimental results verify the effectiveness and superiority of the proposed method.
Open-wingding permanent magnet synchronous machine, model predictive control, open-phase fault, fault tolerant control
TM351
10.19595/j.cnki.1000-6753.tces.200704
國(guó)家自然科學(xué)基金資助項(xiàng)目(51877197)。
2020-06-24
2020-09-12
陳文漢 男,1996年生,碩士,研究方向?yàn)殚_(kāi)繞組電機(jī)高性能控制。E-mail:sorachen@zju.edu.cn
孫 丹 女,1975年生,教授,博士生導(dǎo)師,研究方向?yàn)榻涣麟姍C(jī)高性能控制策略和雙饋風(fēng)力發(fā)電技術(shù)。E-mail:sundan@zju.edu.cn(通信作者)
(編輯 郭麗軍)
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
- 電工技術(shù)學(xué)報(bào)的其它文章
- 基于不同網(wǎng)架結(jié)構(gòu)的直流微電網(wǎng)穩(wěn)定性分析
- 基于多核并行計(jì)算的永磁同步電機(jī)有限集模型預(yù)測(cè)控制策略
- 開(kāi)繞組永磁同步電機(jī)混合雙矢量模型預(yù)測(cè)控制
- 基于粒子群算法的永磁同步電機(jī)模型預(yù)測(cè)控制權(quán)重系數(shù)設(shè)計(jì)
- 基于交叉重疊差分變換的MMC-HVDC線路故障識(shí)別方法
- 負(fù)載換流逆變器驅(qū)動(dòng)電勵(lì)磁同步電機(jī)無(wú)速度傳感器模型預(yù)測(cè)控制方法