面向靜態電壓調節的無功優化電壓穩定研究?
2020-12-23 11:50:46陳飛
計算機與數字工程 2020年11期
陳 飛
(云南電力調度控制中心 昆明 650011)
1 引言
隨著電網的迅速發展和電力需求的增加,造成電壓穩定性的挑戰也越來越大[1~3]。靜態電壓是確保系統無功平衡的重要指標[4]。當系統的無功功率缺乏時,量測點的電壓就會下降;當系統的無功功率過剩時,量測點的電壓就會升高[5]。其中,電壓下降會降低區域電網的輸電能力,同時增加電力損耗,這不利于電力設備的運行[6]。同時,還可能導致系統電壓崩潰,甚至造成區域電網發生更嚴重的事故。為了保證區域電網運行安全,避免電壓失穩事故的發生,因此,有必要對如何在線監測靜態電壓穩定性進行研究。
電壓穩定性評價指標是區域電網中靜態電壓穩定性研究的重要內容,也是實現靜態電壓穩定性控制的基礎。文獻[7]中提出了L 型電壓穩定在線監測指標,由于其準確性和快速性優點,其已被廣泛應用于實際電網的電壓在線監測中。然而,現實中電網的實際電抗值大于實際電阻值,且母線電壓相位較小。文獻[8]針對靜態電壓調節,提出了L-Q 靈敏度分析方法,L-Q 靈敏度分析方法有助于定量分析不同節點之間的靜態電壓變化,但該方法需要大量的計算,并且其求解靜態電壓不穩定性的反應速度還有待提高。
針對上述問題,本文以L 型電壓穩定在線監測指標為基礎,將其局部L 指標推廣為全局L 指標,分析了不同無功功率注入對靜態電壓穩定性的影響。根據全局L 指標的可微性質,推導出一種關于無功優化的通用求解方法。該方法可以計算負載節點無功功率的注入量,并使得電網運行達到最佳穩態,確保電網運行安全,避免電壓失穩事故。
2 局部L指標的優化
根據文獻[9]提出的兩節點配電網系統靜態電壓穩定局部L 指標,本文將其局部L 指標推廣為全局L 指標,并應用于常見的多節點區域配電網系統中,并將有功功率注入節點(P 節點)和無功功率注入節點(Q 節點)組成系統中負載節點的集合,定義為αL。對于任意負載節點j(j ∈αL),局部L指標(Lj)可描述為
其中,Sj是負載節點i 和負載節點j 的注入功率,是負載節點j 的自導納,vj是負載節點j 的電壓幅值,等于,Vi是負載節點i 的電壓矢量,和分別是負載節點i 到負載節點j 的共軛值和導納的共軛值,是負載節點j 的自導納,其數值等1 Zjj,是負載節點j 自導納的共軛值,是負載節點i 和節點j 之間互阻抗的共軛值,

其中,Si是系統對負載節點i 的注入功率,為了保證靜態電壓的穩定性,系統中的每個負載節點j 必須滿足局部L 指標的Lj≤1[10]。則系統的全局L 指標定義如下:

其中,L的范圍從0到1.0。L的數值越小,系統表現越穩定。當L 接近1.0 時,系統趨于臨界穩定狀態[11]。式(1)是一個運算復雜的計算公式,隨著電網規模的擴大,計算量將急劇增加。由于電抗值遠大于實際電網電阻值,且母線電壓相位較小[12]。文獻[13]在不考慮電抗和電壓相位的情況下,提出了一種簡化的L指標,為了確保系統的穩定性,L值必須小于1.0,即
局部Lj指標與1.0 之間的差值可以用作系統的靜態電壓穩定裕度:
其中,Pi和Qi分別表示有功功率注入和無功功率注入。 Xji是負載節點i 和節點j 之間的電抗值,因此,式(5)可以簡化為
3 全局L指標的確定
當配電網需要進行無功補償時,無功功率注入的變化量設置為ΔQi,則無功功率可更新為Qi+ΔQi,并且無功功率注入與Lj的關系為
當局部Lj指標對ΔQi的一階偏導函數值設為0 時,可以得到Lj的極值。由于Lj是凸函數,因此極值是最小值。因此,當局部Lj指標為最小值時,配電網運行在最佳穩定狀態。局部Lj指標對ΔQi的一階偏導函數為

其中,m 是負載節點的數量。
由于配電網中通常存在多個節點,因此需要反復求解極值。為了簡化計算和便于理解,將每個節點對應的局部Lj指標值相加,并將總和設置為Lsum,其表達方式為
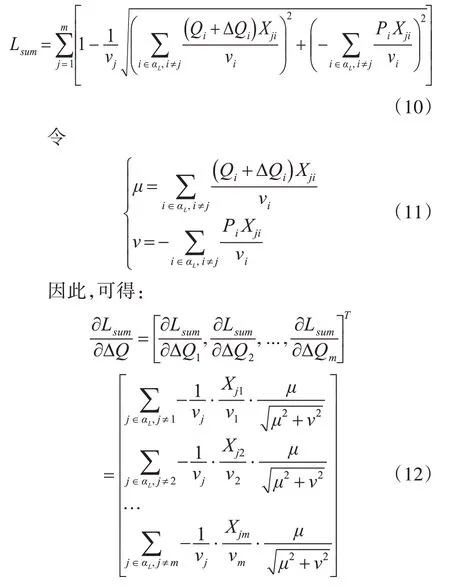
當式(12)的值等于零矢量時,可以將其轉換為矩陣形式:
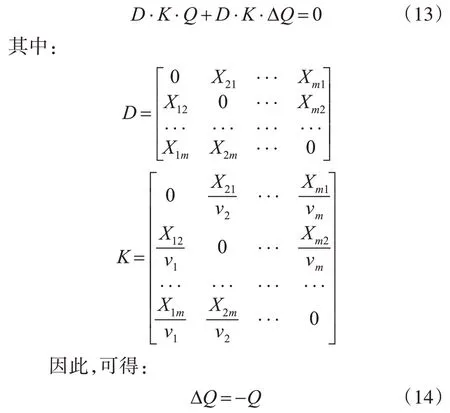
由此可見,局部無功功率注入的變化量ΔQi經過累加求和等于全局無功功率注入的變化量-Q,因此,證明了局部L指標推廣為全局L指標的合理性。
4 仿真實驗
4.1 參數設置
根據以上推導,本文在MATPOWER 平臺上對IEEE-14和IEEE-30系統分別進行測試。
測試1:IEEE-14 節點模型的基準容量為200MVA,靜態的基準電壓為35kV,整個配電網系統總負載為57.4±15.5MVA,靜態電網有16條支路,由于配電網運行是開環運行,減去原有的14,15,16三條支路,其網絡結構如圖1所示。
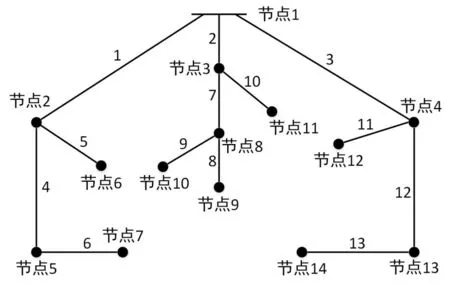
圖1 IEEE-14系統的結構
IEEE-14 系統的線路數據和節點功率分別為如表1和表2所示。
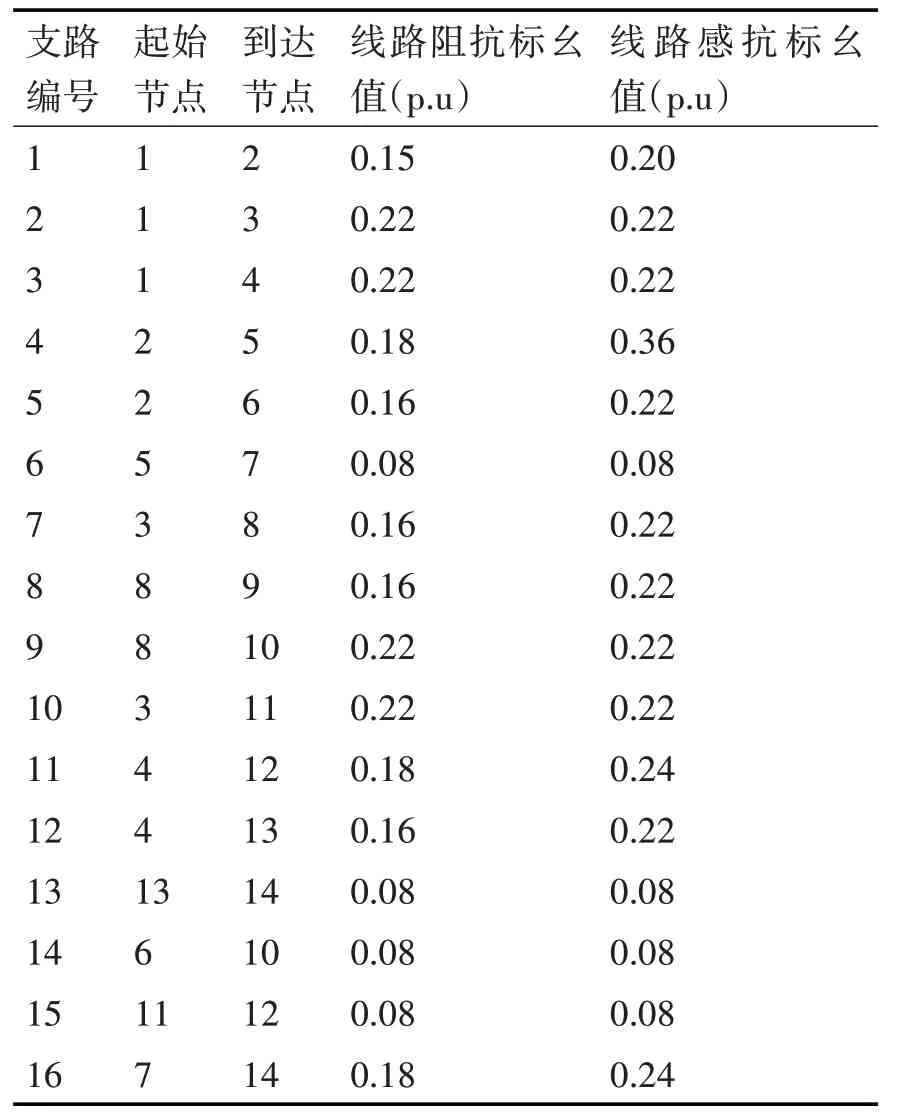
表1 IEEE-14系統的線路數據
測試2:本文所測試的IEEE-30 節點模型詳細參數詳見文獻[14]。
4.2 實驗分析
測試1:對于IEEE-14 系統,以原始負載為基準,以原始負載的1/5作為步長,負載從原始負載的0.2 倍變化到4.2 倍,如圖2 所示。其中,圖2(a)中的曲線L是沒有無功補償的全局L指標值,而Lc是具有無功補償的全局L 指標值。圖2(b)中的Ls和Lsc分別是沒有無功補償和有無功補償的所有局部Lj(j=1,2,…,m)指標值Lsum的總和。
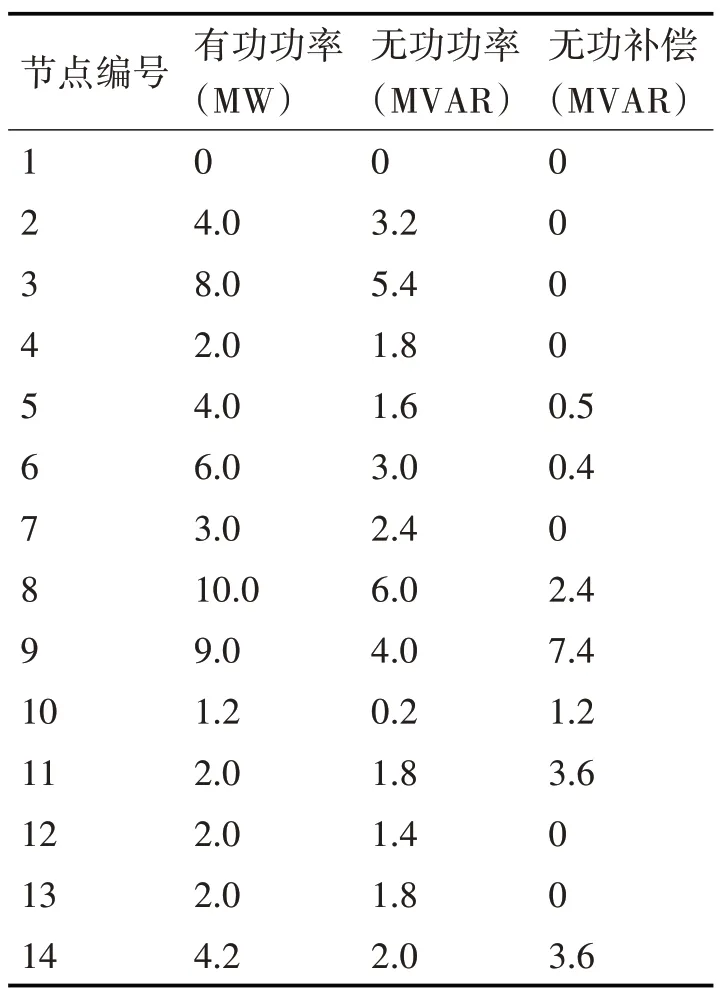
表2 IEEE-14系統的節點功率
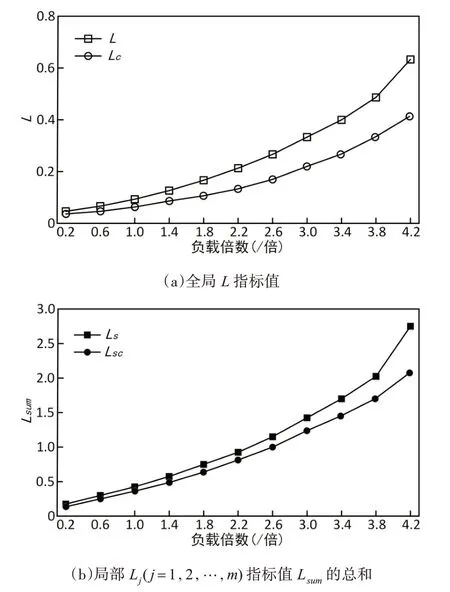
圖2 IEEE-14負載變化引起的L 指標值
由圖2(a)可見,對比曲線L 和Lc,具有無功補償的全局L 指標值Lc小于沒有無功補償的全局L指標值L,因此,本文所提出的局部L 指標推廣為全局L 指標提高靜態電壓穩定性的效果更加明顯,并且隨著負載的增大,效果越顯著,這說明所提出的方法有助于確保電網運行的安全,降低電網崩潰的風險。當負載變化到3.8 倍時,全局L 指標值接近0.5,這意味著系統處于非常敏感的狀態,即負載的輕微增加會增加靜態電壓不穩定的可能性,而Lc指標值約為0.3 時,足以避免靜態電壓的失穩。由圖2(b)可見,通過曲線L 和Lc與曲線L 和Lsc的比較,可以得出結論:兩組曲線的形狀和趨勢一致。因此,L 和Lc可以放大為Ls和Lsc,這樣也便于監測觀察。
測試2:對于IEEE-30 系統,以原始負載為基準,以原始負載的1/5作為步長,負載從原始負載的0.2 倍變化到4.2 倍,如圖3 所示。提高靜態電壓穩定性的效果與IEEE-30系統相似,負載功率裕度也得到改善。
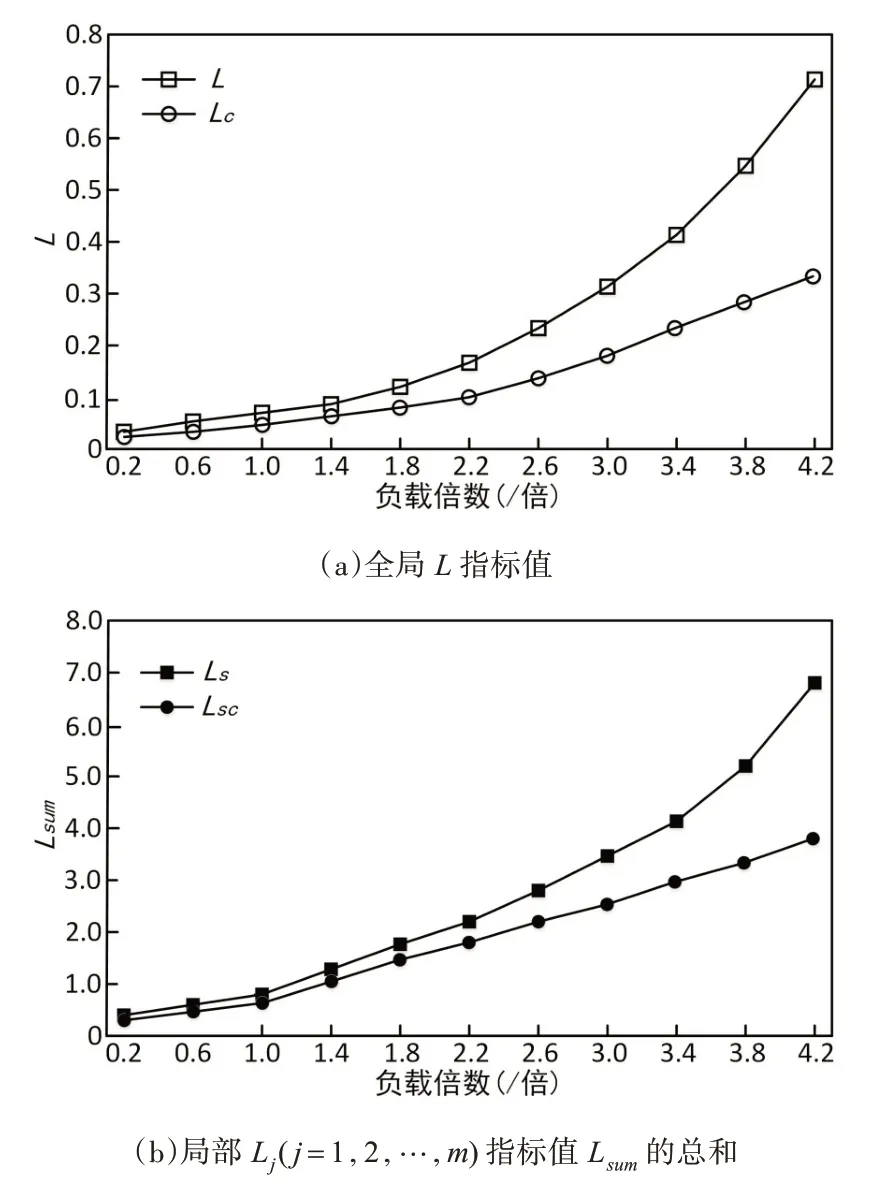
圖3 IEEE-30負載變化引起的L 指標值
由IEEE-14 和IEEE-30 系統的測試結果說明了所提方法具有普遍適用性。上述模型與實際電網之間的差異不可忽略,這使得模型的電壓降比例大于實際電網的電壓降比例。在實際電網中,電阻遠小于電抗,并且由有源負載引起的電壓降幾乎可以忽略不計。如果將所提方法應用于更接近實際電網的模型中,則結果將會更加理想。
5 結語
本文將局部L 型電壓穩定在線監測指標推廣到全局L 指標,分析了不同無功功率注入對靜態電壓穩定性的影響。根據全局L 指標的微分基本性質,推導出一種關于無功優化的通用且規范的分析算法。仿真結果表明,講該方法應用于IEEE-14和IEEE-30 系統,能夠顯著有效地提高電網的靜態電壓穩定性,降低電網崩潰的風險,且負載越大,效果越顯著。該方法具有普遍適用性,可以保證電網運行安全,避免靜態電壓失穩故障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24