具有時(shí)滯狀態(tài)導(dǎo)數(shù)反饋的高階多智能體系統(tǒng)的一致性
2020-10-16 02:10:00晉守博
通化師范學(xué)院學(xué)報(bào)
2020年10期
晉守博
近年來(lái),多智能體系統(tǒng)的研究受到了廣泛關(guān)注,該系統(tǒng)的優(yōu)點(diǎn)在于能夠較好地描述復(fù)雜的集體行為,如魚(yú)群的游動(dòng)、無(wú)人機(jī)群的控制以及計(jì)算機(jī)網(wǎng)絡(luò)控制等.一致性是多智能體系統(tǒng)最重要的性質(zhì)之一,為了使所有智能體隨著時(shí)間變化能夠達(dá)到一致,最關(guān)鍵的問(wèn)題是構(gòu)造控制策略.對(duì)多智能體系統(tǒng)的一致性的研究是目前的一個(gè)熱點(diǎn),針對(duì)如何實(shí)現(xiàn)系統(tǒng)的一致性,文獻(xiàn)[1]和文獻(xiàn)[2]分別從數(shù)值模擬和理論證明方面作了分析,多智能體系統(tǒng)是一種比較特殊的復(fù)雜系統(tǒng),它的穩(wěn)定性與系統(tǒng)的通訊時(shí)滯具有密切關(guān)系,近期許多學(xué)者都在研究時(shí)滯對(duì)系統(tǒng)的影響,針對(duì)低階系統(tǒng),文獻(xiàn)[3-5]對(duì)該問(wèn)題作了詳細(xì)地討論;針對(duì)高階系統(tǒng),文獻(xiàn)[6-7]設(shè)計(jì)了一種僅依賴(lài)位置狀態(tài)的控制策略,分析了系統(tǒng)的一致性問(wèn)題.三階多智能體系統(tǒng)可以表示如下:其中:i∈I,I= {1,2,…,N}表示智能體的數(shù)量集,函數(shù)xi(t),vi(t),zi(t) ∈R 代表位置、速度和加速度,函數(shù)ui(t) ∈R 是控制輸入變量.
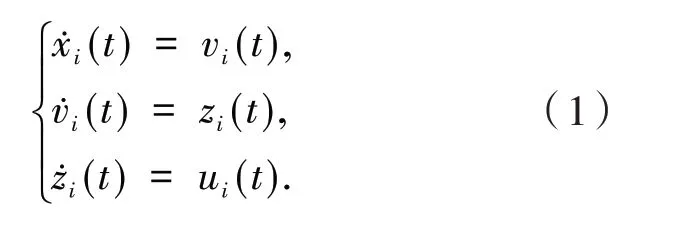
與一階、二階多智能體系統(tǒng)相比,系統(tǒng)(1)更加復(fù)雜,不僅能夠描述智能體的位置和速度狀態(tài),而且能夠描述加速度的變化情況[8-9].目前,對(duì)于高階多智能體系統(tǒng),大部分學(xué)者設(shè)計(jì)的控制策略里既包含位置狀態(tài),又包含速度和加速度的狀態(tài),然而,現(xiàn)實(shí)中智能體的速度和加速度很難測(cè)量,對(duì)于沒(méi)有裝備速度和加速度傳感器的智能體,需要設(shè)計(jì)僅含有位置狀態(tài)的控制協(xié)議,LIU 等討論了只含有位置狀態(tài)控制的二階多智能體系……
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32