一種分布式雷達網中的航跡關聯方法
2020-04-02 10:10:46楊廣廳李子杰
無線電工程 2020年4期
白 晶,楊廣廳,李子杰
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.北京市遙感信息研究所,北京 100192)
0 引言
分布式雷達網[1-2]數據融合過程中,當融合中心獲得局部傳感器送來的局部航跡后,需要對局部航跡進行航跡分類,然后再對歸類后的航跡進行航跡融合,最后形成系統航跡[3-8]。直接對整個目標區域的多條局部航跡進行兩兩關聯,運算量會非常大,每2條航跡間進行關聯時,都需要求得局部雷達傳感器跟蹤濾波器提供的檢驗統計量,求該檢驗統計量時要計算矩陣的求逆、相加和相乘[9-12]。目前,雖然計算機運算速度非常快,但是矩陣的運算量非常大,尤其是求逆運算。在雷達網航跡關聯中[13-16],由于多部雷達同時跟蹤多個目標,局部航跡的數量是實際目標數量的幾倍,給直接進行航跡關聯帶來了很大的負擔。所以對雷達網多條局部航跡選擇一種關聯策略,將航跡關聯次數降低是必要而且必需的。
從實際工程應用角度出發,提出了一種區域航跡關聯策略。其核心思想是將目標區域分成若干小區域,落在小區域內的航跡與其相鄰區域進行關聯比較,而與它不相鄰的區域無需關聯。每個區域(包括大區域和小區域)賦給相應的一個坐標,并與目標的平面直角坐標相對應。最后根據目標航跡的區域坐標和關聯準則,對落在相鄰區域內的航跡間進行航跡關聯。
1 目標區域相關定義
1.1 目標區域和目標子區域
目標區域是指雷達網所覆蓋的目標數據處理區域,雷達網對落在該區域內的目標航跡均需要進行航跡關聯。目標子區域則是整個目標區域劃分成若干相等的區域后的小區域,可劃分成更小的子區域。
1.2 區域坐標
區域坐標選用類似方格坐標系(一種按地球球面經緯度分區的坐標系)的劃分方法。目標區域劃分成若干相等的區域后,每個目標子區域的編號都是一位十進制數。
1.3 區域航跡集合
定義下面的集合為區域航跡集合:
TSci={T1,T2,T3,…,TNc},i=1,2,3,…,
式中,TNc為在第i個關聯周期落在區域坐標為c的子區域中的航跡;Nc為落在該子區域內的航跡總數,也是整個集合的元素個數,顯然Nc≥0。
1.4 相鄰區域坐標集合
定義下面的集合為相鄰區域坐標集合:
Sca={cci|ci為區域坐標為c的子區域相鄰的所有區域的坐標}。簡單起見,Sca的元素cci簡化為ci。
定義Scw={y|y為所有子區域的坐標}為坐標全集,則不相鄰區域坐標集合為:
2 區域航跡關聯準則
整個目標區域被劃分成3級3×3的區域后,其方格坐標的分布情況如圖1所示。給出了1號方格中所有小小方格的坐標和所有中方格邊界上的坐標。
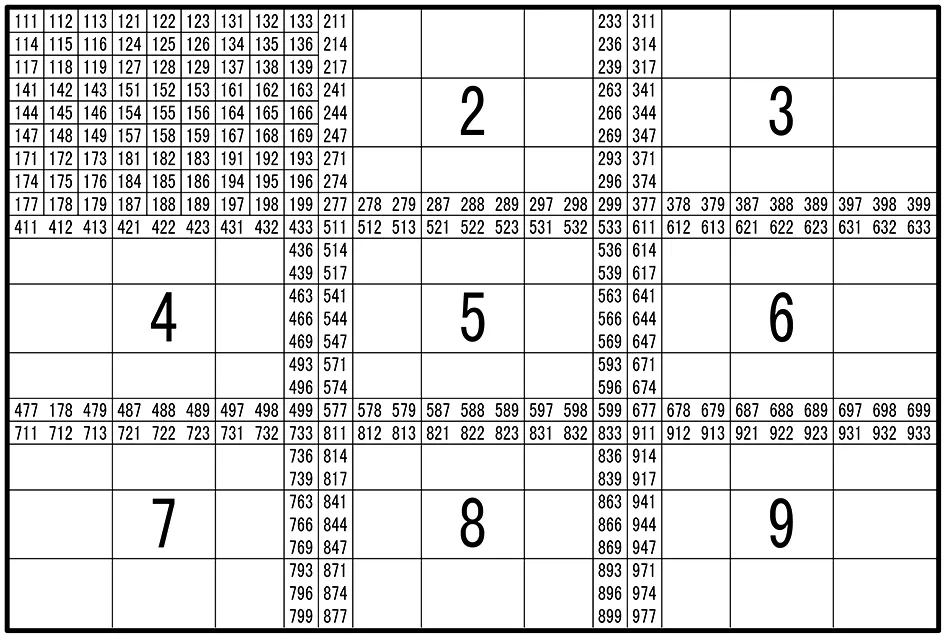
圖1 區域方格坐標系示意Fig.1 Regional square grid coordinate system
區域坐標集合Sca相對應的區域航跡集合設為
?
定義如下關聯準則:

U1={1,2,…,n1},U2={1,2,…,n2},
那么集合U1,U2中的航跡之間的關聯驗證問題變為如下的假設檢驗問題:


采用文獻[3]中的加權航跡關聯算法,可構造如下的檢驗統計量:
3 特定目標批數和覆蓋率下的航跡關聯
以上討論了航跡間的關聯準則,現在約定區域內部和相鄰區域間的航跡關聯準則。首先在區域內部進行航跡關聯,其次在相鄰區域之間進行航跡關聯,區域內部進行關聯時,在未關聯航跡與已關聯航跡間進行關聯,然后在未關聯航跡與未關聯航跡間進行關聯。區域之間進行關聯時,也在未關聯航跡與已關聯航跡間進行關聯,然后在未關聯航跡與未關聯航跡間進行關聯。
假設目標區域的雷達序號為:1,2,3,…,R,這里R為雷達覆蓋率。某個子區域對應的航跡集合TS表示為:
式中,mik,mjk分別代表航跡集TSi,TSj相對應的源自雷達k的未關聯航跡數;nik,njk分別代表航跡集TSi,TSj相對應的源自雷達k的已關聯航跡數;Mi,Mj分別代表航跡集TSi,TSj相對應的所有未關聯航跡數;Ni,Nj分別代表航跡集TSi,TSj相對應的所有已關聯航跡數。在此基礎上進一步討論分區前后的航跡關聯次數。在計算航跡關聯次數時,考慮關聯次數最多的極限情況。
3.1 分區前的情況

分區前的所有航跡關聯次數也由未關聯航跡與已關聯航跡之間的最大關聯次數、未關聯航跡與未關聯航跡之間的最大關聯次數組成。
(1)未關聯航跡與已關聯航跡之間的關聯次數Nbef1:
(1)
(2)未關聯航跡與未關聯航跡之間的關聯次數Nbef2:
(2)
根據式(1)和式(2)可得分區前的航跡關聯總次數Nbef:
Nbef=Nbef1+Nbef2。
(3)
3.2 分區后的情況
(1)航跡集TS內部關聯次數Nint
① 未關聯航跡與已關聯航跡之間的關聯包括源自每部雷達的未關聯航跡與其他雷達的已關聯航跡之間的最多關聯次數。那么有:
(4)
② 未關聯航跡與未關聯航跡之間的關聯包括源自每部雷達的未關聯航跡與其他雷達的未關聯航跡之間的最多關聯次數。那么有:
(5)
根據式(4)和式(5)可得分區后的航跡集合內部關聯總次數:
Nint=Nint1+Nint2。
(6)
(2)相鄰航跡集TSi與TSj之間的關聯次數Nbetw
①TSi中未關聯航跡與TSj中已關聯航跡之間的關聯包括TSi中源自每部雷達的未關聯航跡與TSj中其他雷達的已關聯航跡之間的最多關聯次數。那么有:
(7)
②TSj中未關聯航跡與TSi中已關聯航跡之間的關聯包括TSj中源自每部雷達的未關聯航跡與TSi中其他雷達的已關聯航跡之間的最多關聯次數。那么有:
(8)
③TSi中未關聯航跡與TSj中未關聯航跡之間的關聯包括TSi中源自每部雷達的未關聯航跡與TSj中其他雷達的未關聯航跡之間的最多關聯次數。那么有:
(9)
根據式(7)~式(9)可得:
Nbetw=Nbetw1+Nbetw2+Nbetw3。
(10)
根據式(6)和式(10)可得分區后的相鄰航跡集合間的關聯總次數Naft:
Naft=Nint+Nbetw。
(11)
4 試驗驗證
從一個典型實例出發,說明分區前后的航跡關聯次數的變化情況。假設目標區域是400 km的方形區域且被劃分成3級3×3的子區域。每個小小方格的長寬約14.8 km。假設某一時刻航跡點平均地分布在區域坐標第一位為3,6,9的中方格內,落在每個小小方格內的目標數設為8批,覆蓋率為3。根據圖1可知,相鄰區域有3個的小小方格共有4個,相鄰區域有5個的小小方格共有64個,相鄰區域有8個的小小方格共有175個。所以,在計算分區后的航跡關聯次數時對航跡集合內部需要考慮243次,而對航跡集合之間需要考慮866次。為了便于計算,設
mik=nik=mjk=njk=4;k=1,2,3,
將它們代入式(1)~式(11)可得:
Nbef=Nbef1+Nbef2=8 503 056,
Naft=243×Nint+866×Nbetw=201 264。
顯然,分區后的航跡關聯次數比分區前的航跡關聯次數大大降低了。
5 結束語
本文從實際工程應用的角度出發,提出了一種可工程化的區域多雷達多航跡關聯方法,該方法特別適合于目標區域中的未關聯航跡數量較多的情況下使用,當目標航跡越集中該方法的效率越高。當目標區域中的未關聯航跡數量較少的情況下,以未關聯航跡為基準航跡建立潛在同源目標條帶,落入該條帶內的未關聯航跡和已關聯航跡均與基準航跡進行關聯驗證即可。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
當代陜西(2019年15期)2019-09-02 01:52:00
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
