超磁致伸縮作動器激光干涉位移測量系統
2019-09-20 07:35:28孟建軍23
測控技術 2019年2期
孟建軍23 白 歡 楊 杏
(1.蘭州交通大學 機電工程學院,甘肅 蘭州 730070; 2.蘭州交通大學 機電技術研究所,甘肅 蘭州 730070;3.甘肅省物流及運輸裝備信息化工程技術研究中心,甘肅 蘭州 730070;4.西安鐵路職業技術學院 牽引動力學院,陜西 西安 710014)
鐵磁材料在交變磁場的作用下長度和體積發生微小應變的現象稱為磁致伸縮效應。磁致伸縮系數高于10-3的材料叫作超磁致伸縮材料(Giant Magnetostrictive Material,GMM),超磁致伸縮作動器(Giant Magnetostrictive Actuator,GMA)是其重要應用領域之一[1]。超磁致伸縮作動器的位移是對其測量和控制的主要物理量之一,而該位移在微米級,因此對其精確測量至關重要。在位移的測量方法中,最早采用應變片和惠斯通電橋的電阻法,這種方法已經較少采用。邁克爾遜激光干涉儀發展至今,已經廣泛應用于長度、位移、表面輪廓和表面粗糙度等的測量[1-3]。干涉儀的優點是以光的波長作為度量單位,具有很高的分辨率,為精確測量提供了有力的工具[4],被用于傳感器的標定。基于上述優點,邁克爾遜干涉儀在振動測量中得到了廣泛應用[5]。但是,這種干涉儀也有其固有的局限性,分立元件邁克爾遜干涉儀有極高的環境條件和調整要求,對溫度、濕度、環境振動、儀器變形和空氣擾動敏感[6-7]。為了使參考光和測量光的光程相等,必須在光路中安裝反射鏡調節光路。此外,干涉光傳播中兩次經過分光鏡,造成一定的能量損失,加之光學器件本身的損耗,導致干涉信號強度降低,對光電探測器的靈敏度提出了更高的要求,這不僅影響了測量精度,甚至導致測量失效[8-9]。此外,常用的條紋計數法還可以進一步細分以提高測量精度。
本文結合工程應用,采用全光纖干涉儀代替分立元件邁克爾遜干涉儀,借助高分辨率動態信號采集卡對光電探測器的輸出信號采樣,在LabVIEW虛擬儀器軟件中用貝塞爾函數對干涉條紋細分處理以提高精度,設計了超磁致伸縮作動器激光干涉位移測量系統。
1 激光干涉法位移測量原理
激光是一種電磁波,用于振動測量的激光近似平面光波。平面光波的波動方程為
(1)
激光干涉原理示意圖如圖1所示,由激光器、分光棱鏡、參考鏡、測量鏡和探測器組成,參考鏡又稱定鏡,測量鏡也稱動鏡,分光棱鏡為半透半反分光鏡。
為了測量位移,在被測物體與激光器的光路上安裝分光鏡,從激光器發出的激光經過分光鏡反射至被測物體上的測量鏡,再由測量鏡反射,透過分光鏡進入光電探測器,光程為l1。當物體產生位移Δx時,激光器與被測物體的光程變為l1+Δx,對應的波動方程為
圖1 激光干涉原理示意圖
(2)
式中,y1為測量光的瞬時值。
假設被測物體以振幅Xm、頻率ω0、時間t、位移x=Xmsinω0t的簡諧振動對光波振動的相位進行調制,波動方程和光強分別為
(3)
(4)
式中,I1為測量光的光強。
盡管物體的振動起到了相位調制的作用,但是這種調制方法的載波仍然是光波,而光波的頻率高達105GHz,光電探測器無法達到如此高的頻率響應[10]。
為了實現振動信號的光波解調,激光器發出的同一激光束經分光鏡透射到參考鏡,然后再經分光鏡反射進入光電探測器,光程為l0,其波動方程為
(5)
式中,y0為參考光的瞬時值,參考光和測量光兩者光源相同,振幅相等。因混頻產生激光干涉,干涉條紋的光強為
(6)
式中,I為干涉條紋的光強。
干涉后的光強中,消去了高頻項ωt,光電探測器能夠響應振動位移的相位調制信號。
2 系統方案
2.1 全光纖邁克爾遜干涉儀
為了克服空氣受環境條件影響所導致的空氣光程差的變化,本測量系統采用全光纖干涉儀。全光纖邁克爾遜干涉儀示意圖如圖2所示,包括激光器、偏振器、3 dB耦合器、檢偏器、探測器、參考臂和測量臂。用3 dB耦合器(分光比50∶50,插入損耗3 dB)代替分光鏡,光纖代替了空氣光程,以敏感光纖作為相位調制元件。激光束經偏振器起偏后進入耦合器分為兩束,由參考臂和測量臂反射回來后進入檢偏器。這種全光纖結構不僅消除了諸多環境條件敏感因素干擾的影響,而且避免了測量前須光路校準、角度垂直等費時煩瑣的準備工作,擴大了干涉儀的使用范圍,應用延伸到許多傳統干涉儀的禁區,適用于現場測量。

圖2 全光纖邁克爾遜干涉儀示意圖
2.2 硬件方案
硬件方案示意圖如圖3所示,由作動器、驅動電源、接口電路、數字和模擬信號發生模塊、計算機和激光干涉儀組成。作動器由驅動電源驅動,產生振幅和頻率可調的簡諧振動,測量角棱鏡安裝在作動器輸出桿表面反射干涉儀發出的激光束。驅動電源主要由全隔離整流模塊、交流負反饋模塊和IGBT模塊組成,產生幅值和頻率穩定的功率脈沖。接口電路進行電平轉換和信號放大,輸出脈沖信號和電壓信號,是連接驅動電源和信號發生模塊的轉換電路。
圖3 硬件方案示意圖
數字和模擬信號發生模塊通過USB接口連接計算機,由計算機控制產生幅值固定、頻率可調的脈沖信號,以及高低可以調節的電壓信號,但其沒有足夠的驅動能力,因此需由接口電路進行轉換。干涉儀產生的拍頻信號和測量信號雙通道輸入至動態數據采集模塊。動態數據采集模塊采用PCI接口與計算機連接,同步數據采集所需的同步信號由數字和模擬信號發生模塊提供,干涉儀輸出的交流信號在動態數據采集模塊內部經放大、整形后同步采樣,由LabVIEW軟件進行數據運算處理。
激光邁克爾遜干涉儀選用丹麥B&K公司的LDV8329,動態數據采集模塊采用臺灣凌華科技的PCI-9527,數字和模擬信號發生模塊采用USB-1902。
3 數據處理與軟件設計
3.1 干涉條紋與位移的關系
邁克爾遜干涉儀中,參考光波和測量光波具有相同的幅值和頻率,測量光波的相位由于物體振動被調制而與參考光波產生相位差,因此,這是一種典型的零差測振法。
在本測量系統中,超磁致伸縮作動器以x=Xmsin(ω0t+φ0)作簡諧振動,其中φ0為初相位。靜止時光程l0與l1相等。測量光的瞬時光程為
l1=l0+Xmsin(ω0t+φ0)
(7)
這說明測量光的光程隨著振動在變化,干涉系統的瞬時光強為
(8)
光電探測器輸出的交流電壓信號為
(9)
式中,U、u分別為交流電壓信號幅值和瞬時值。

(10)
由此可見,作動器的位移Xm與干涉條紋的個數n存在線性關系。把簡諧振動信號經過整形后作為計數器的門控制信號,觸發計數器計數,一個周期內的計數值n,代入式(10)計算得到作動器的位移Xm,這種方法稱為干涉條紋計數法[11]。
3.2 數據采集與處理
數據采集采用音頻、聲學和振動專業測試的24位高性能同步動態信號采集卡PCI-9527,采樣率為432 kS/s,交流耦合輸入模式,編程輸入范圍-10~+10 V。數據采集卡的模擬信號輸入端同步采集光電探測器輸出的交流電信號,由LabVIEW軟件用貝塞爾函數法進行分析處理。
超磁致伸縮作動器簡諧振動的位移表達式為x=Xmsin(ω0t+φ0),對應光電探測器輸出的電流信號為
(11)

第一類n階貝塞爾函數Jn(x)為[12]

(12)
式中,n為貝塞爾函數的階;a為正整數;m為1~+a的正整數。第一類貝塞爾函數曲線圖如圖4所示。
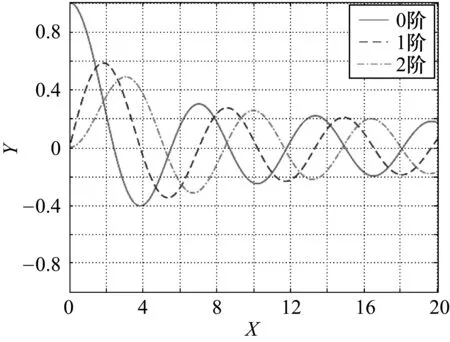
圖4 第一類貝塞爾函數曲線圖
由圖4可知各階曲線的零點互不重合,同階相鄰的零點之間總包含不同階的零點,幅值隨時間呈衰減趨勢。利用貝塞爾函數展開式(10),其中
(13)
(14)
計算機處理數據時,如果xnm表示Jn(x)的n階第m個零點,則用下列近似公式計算貝塞爾函數的零點。
(15)
(16)
B=4m2
(17)
C=7B-31
(18)
D=83B2-982B+3779
(19)
E=6949B3-153855B2+1585743B-6277237
(20)
用近似式(15)~式(19)計算n階第m個零點,貝塞爾函數的零點Jn(xnm)=0,如表1所示。
3.3 軟件流程設計
軟件流程圖如圖5所示。軟件開始運行,首先進行系統初始化,初始化過程包括:波長設定、輸入通道設置、輸入耦合方式設置、模擬輸入范圍程序控制和采樣率設置。系統默認激光波長為0.6328 μm,波長可以通過軟件設置,以提高軟件的通用性。初始化完成后,執行零點校準,消除電路靜態噪聲對測量結果的影響。參數設置包括頻率設定和電流設定,設定驅動電源的輸出電流,實現輸出電流在1~30 A的范圍內以步長0.1 A步進調節,控制作動器的輸出位移,頻率設定控制驅動電源的開關頻率在1~400 Hz范圍內以步長0.1 Hz連續可調,從而改變加在作動器的功率脈沖,使作動器驅動線圈產生交變磁場,按設定的頻率作簡諧振動。系統啟動、延時等待,驅動作動器的開關電源電流和頻率從暫態過程進入穩定狀態需要一個過渡過程,這個過程需要控制頻率,特別是電流的上升率,避免作動器電流上升速度過快造成開關電源瞬間過載,對電源和負載帶來過大沖擊甚至過載損壞。
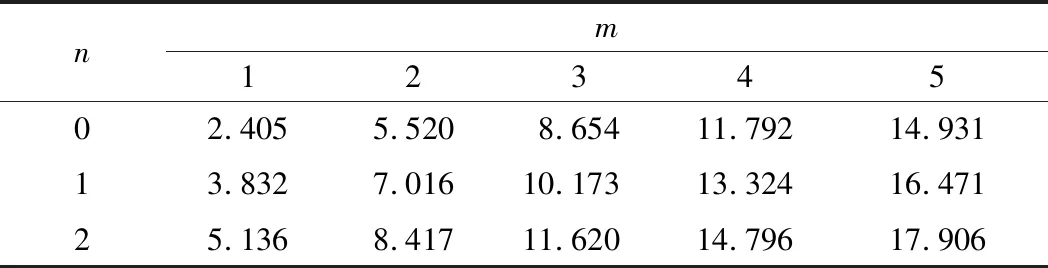
表1 貝塞爾函數的零點Jn(xnm)=0
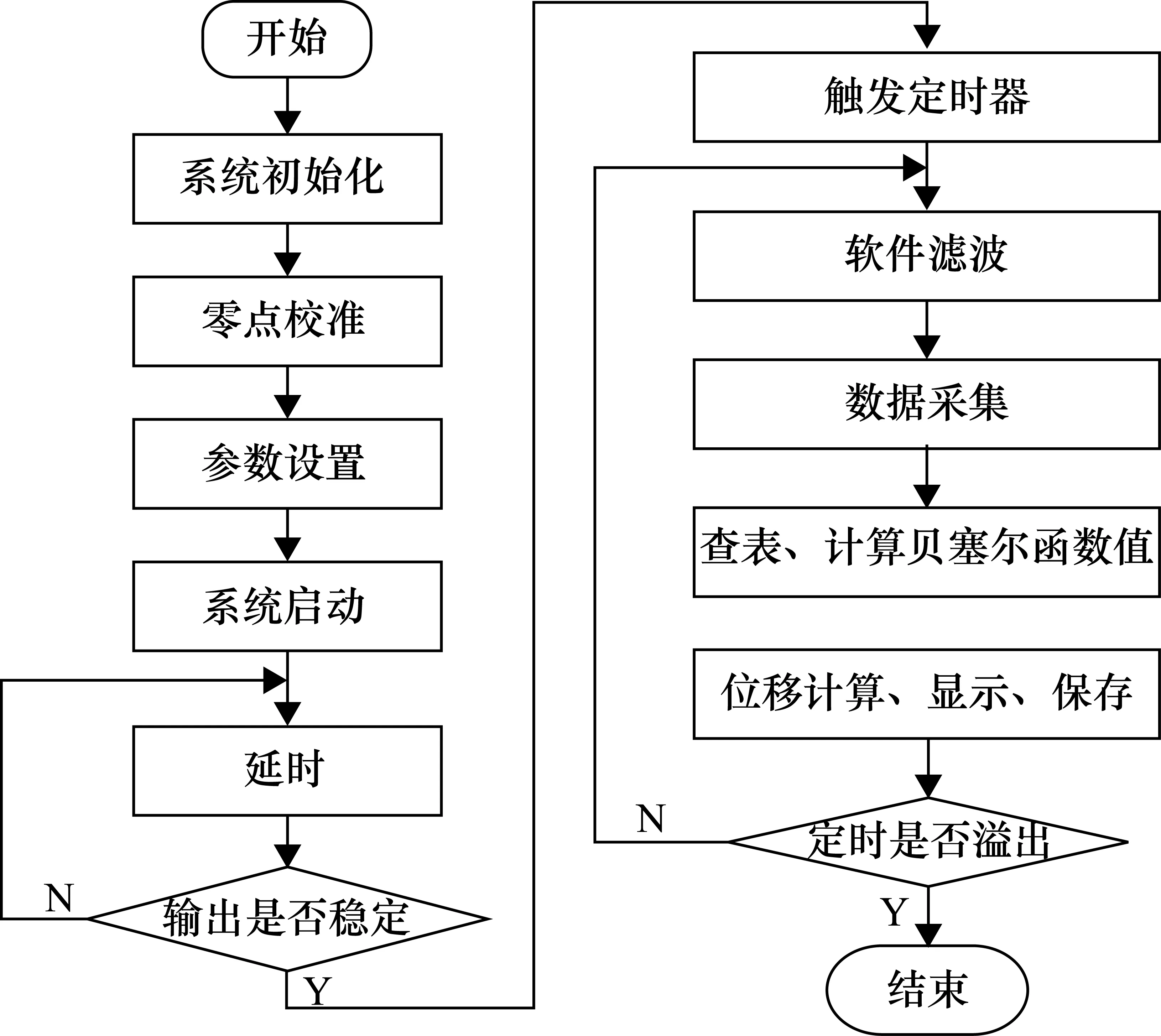
圖5 軟件流程圖
作動器電流和頻率穩定后,定時器立即觸發,定時開始;光電探測器輸出的電信號由LabVIEW軟件濾波,抑制交流信號中疊加的高頻分量,保留低頻分量;數據采集按照設定的采樣率對振動的位移信號進行同步采樣,以時間序列把每一個采樣點保存到映射的寄存器中,進行后續處理;貝塞爾函數0、1、2階對應的5個零點記錄在一個二維表中,按照3.2節所述的數據處理算法以固定周期查找函數表,計算貝塞爾函數值;瞬時位移測量本身需要的時間很短,但是,作動器的簡諧振動在實際的工作環境下不可避免地受到外界各種擾動的影響,瞬時測量的位移數據無疑是不穩定的,隨著測量時間的增加,樣本函數的數量也相應增加,測量結果無限趨近數學期望,最終得到數據可靠的作動器位移值;定時器觸發到一個測量步驟完成,自動判斷定時器是否溢出,選擇程序運行進入下一個循環或結束。
4 實驗結果及誤差對比
4.1 實驗結果
超磁致伸縮材料是作動器的核心元件,超磁致伸縮作動器的機械參數和驅動電源的電氣參數如表2所示。驅動電源輸出頻率1~400 Hz,步長0.1 Hz,驅動電流1~30 A,步長0.1 A步進調節,作動器在驅動電源發出的功率脈沖激勵下,做簡諧振動。
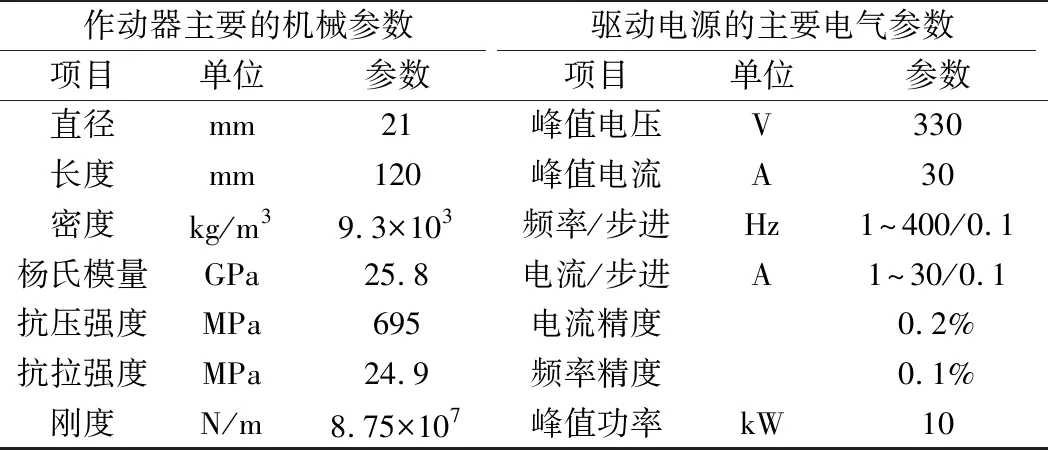
表2 超磁致伸縮作動器的機械參數和驅動電源的電氣參數
施加一定頻率和電流的功率脈沖,使作動器做簡諧振動,用激光干涉法測量超磁致伸縮作動器在不同頻率和電流下的位移,每個測量點記錄對應的位移值,以分析頻率、電流與位移之間的關系。
不同頻率和電流下的超磁致伸縮作動器位移值如表3所示。

表3 不同頻率和電流下的超磁致伸縮作動器位移值
在1 Hz和50 Hz頻率點,電流以0.1 A的步進遞增,位移隨著電流的增大小幅增大;在100 Hz、200 Hz、300 Hz和400 Hz頻率點,分別取電流1 A、5 A、10 A、20 A、30 A,位移隨著電流的增大而大幅增大,隨著頻率的增高也略有增大。測量結果表明,作動器的位移與電流大致呈遞增的近似線性關系。
4.2 誤差對比
激光干涉儀的主要誤差源對測量系統的不確定度有直接影響,光電探測器輸出的電信號經數據采集卡采樣也會存在誤差。 這些主要誤差源有:激光頻率不穩定造成的光源誤差;測量光軸與反射鏡面不垂直引起的余弦誤差;動態信號采集卡固有的轉換誤差。
(1) 光源誤差。
超磁致作動器位移激光干涉法測量以光的波長作為度量單位,由于激光頻率不穩定而造成的波長誤差為Δλ=±0.5×10-5μm,λ=0.6238 μm,光源誤差為
(2) 余弦誤差。

(3) 轉換誤差。
動態信號采集卡程控模擬輸入范圍為-10~+10 V,絕對誤差為ε3±0.2 mV,其相對誤差為
測量系統相對誤差為
實際測量值與理論計算值對比如圖6所示。實際測量值和理論計算值之差與理論計算值相比較,得到測量系統實際的相對誤差為0.056%,說明實際測量相對誤差與理論計算相符,表明測量結果準確可靠。
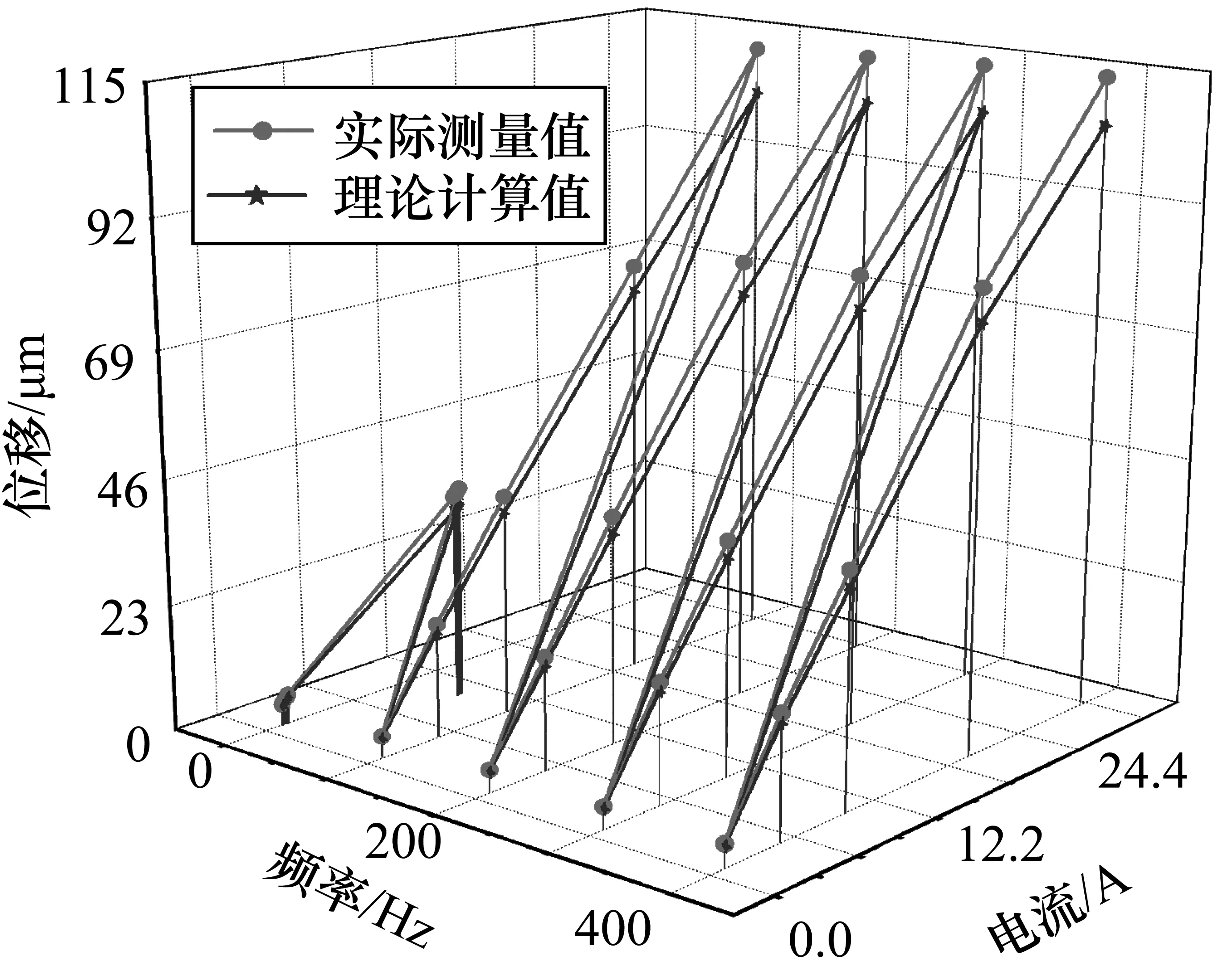
圖6 實際測量值與理論計算值對比
5 結束語
采用全光纖激光干涉儀和高性能同步動態信號采集卡,配合LabVIEW測試軟件,應用貝塞爾函數的干涉條紋細分技術的超磁致伸縮作動器激光干涉位移測量系統,克服了分立元件邁克爾遜激光干涉儀環境要求高、調整繁瑣和易受干擾的缺點。與條紋計數法相比,貝塞爾函數法的測量精度更高,該系統適用于超磁致伸縮作動器位移的實驗研究和現場測量,可為微位移的測量提供一種參考方法。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
