基于最小二乘法的車道線彎道檢測算法
2019-09-10 06:32:36徐曉光
綏化學院學報 2019年8期
王 珍 徐曉光
(安徽工程大學電氣工程學院 安徽蕪湖 241000)
智能交通系統ITS中最具有重要意義的就是實現無人駕駛,而無人駕駛最首要的任務就是準確地識別出車道線并根據車道線的指示去行駛,國內外研究無人駕駛汽車的學者和企業都是基于視覺傳感器的車道線識別方法來檢測車道線[1],目前常用的方法主要是兩大類,一類是基于模型[2-3],另一類是基于特征[3-4]的檢測方法。李明等人[2]提出一種直線-曲線模型,對直線部分采用霍夫變換檢測;在提取到的感興趣區域里利用多段直線近似等效成曲線的方法對彎道部分進行擬合;劉振超[3]利用透視變換及其逆過程對圖像進行處理,去除大量噪聲,用水平亮度微分對車道線進行處理以獲得局部最亮的車道線,根據獲取的車道線而選出特征點,再用霍夫變換進行擬合。黨宏社等人[4]利用Gabor模板獲得不同尺度和方向的特征圖,對特征圖進行融合得到圖像的紋理特征,確定左右車道線相交的消失點,從而對車道線進行定位進而對直線擬合。王懷濤等人[5]根據黃色車道線的顏色特征檢測出黃色車道線像素點,然后檢測出采集的道路圖像的車道線邊緣的像素點,將這兩類像素進行與運算,在得到的效果圖上進行霍夫變換,檢測出黃色車道線。無人駕駛汽車在行駛中,復雜多變的行車環境會影響汽車視覺系統對車道線及其他路況進行采集的準確性。針對以上問題,本文提出一種新的道路圖像處理方法并采用最小二乘法結合拋物線模型檢測車道線彎道部分。該算法首先建立車道線檢測模型,該檢測模型是依據結構化高速公路上道路平坦,車道線標識明顯的特點進行建立的;其次采用圖像預處理的方法最大程度地消除干擾信息并檢測車道線的邊緣特征;然后采用最小二乘法根據邊緣特征所構成的點集進行左右車道線彎道部分的檢測。
一、車道線檢測模型
無人駕駛汽車在高速公路的彎道部分駕駛時,由于彎道存在一定的盲區,并不能及時發現其他車輛等危險信息,容易發生交通事故。所以若要保證自動駕駛汽車能夠在高速公路上安全行駛,就要提高車道線檢測的準確性[6]。本文根據高速公路上道路平坦結構化程度高的特點提出一種新的方法:1.對采集的道路圖像進行感興趣區域提取,在很大程度上能夠減少數據的處理量;2.在感興趣區域內對圖像進行圖像灰度化、平滑濾波等預處理,剔除對車道線檢測不利的冗余信息;3.圖像預處理之后,計算感興趣區域內的所有連通區域的面積,并進行排序,刪除小面積區域,選出面積最大的兩個連通區域,確定左右車道線區域;4.確定了車道線所在區域之后,提取梯度幅值作為車道線的邊緣像素點,利用逆透視變換將邊緣像素點轉換成世界坐標系下的邊緣點集;5.采用最小二乘法結合拋物線模型對車道線點集中的點進行擬合,并標記出擬合的車道線。檢測的整體流程圖如圖1所示。

圖1 車道線檢測流程圖
二、圖像處理
在高速公路中,通過視覺傳感器采集到的視頻圖像會受道路兩邊的天空、建筑、樹木等復雜背景以及光照強度變化不均等因素的干擾[7]。對視頻圖像進行有效地圖像預處理能夠在一定程度上去除對檢測車道線特征像素點不利的冗余信息,去除大量的噪聲,為車道線的后續檢測和標記提供了保障。
(一)感興趣區域提取。對采集到的道路圖像進行圖像預處理的方法有很多,其中感興趣區域(Region of interest,ROI)提取是比較常用的一方法。這種圖像處理方法在一定程度上表達了圖像中不同區域的重要程度,減少圖像的干擾信息并突出所需要處理的圖像內容,減少了道路圖像數據的計算量。當車載相機被固定后,一般不會進行再次調整,因此采集到的視頻圖像的車道線的位置往往是固定的,基于此先驗信息,定義道路圖像的感興趣區域可以大大減少圖像中對檢測車道線不利的例如房屋、天空和車輛等數據信息,降低圖像背景對檢測車道線的干擾,這從根本上減少了后續車道線算法處理所需要的時間,提高了算法效率[8]。采集到的道路圖像中的車道線位置基本上位于圖像的下半部分。如圖2所示,本文的所有的圖像的感興趣區域均設置在圖像的下半部分,圖2(a)為采集的初始道路圖像,圖2(b)為提取的感興趣區域圖像,由圖看出,這樣操作可將車道線信息完整的保留又盡可能地去除圖像對檢測無用的信息。
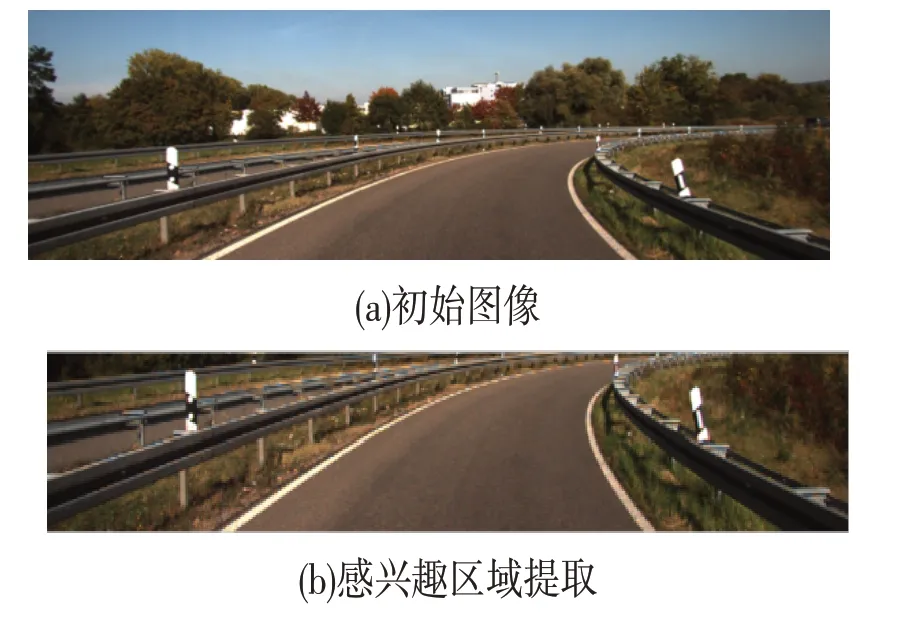
圖2 感興趣區域
(二)圖像灰度化。由于車載相機采集到的彩色圖像中含有大量對車道線檢測無用的視覺信息,且車道線自身與路面的灰度值相差較大,在灰度圖中即可方便地提取出車道線,因此,本文車道線的提取均在灰度圖像中進行。灰度化處理的方法有很多種,其中,最常用的是對R,G,B 三個分量進行加權平均。加權分量法公式如式(1)所示。灰度化圖像如圖3所示。


圖3 圖像灰度化
(三)平滑濾波。車載相機在獲取道路圖像的過程中或多或少地會產生噪聲點,這對車道線的檢測是不利的。為了平滑圖像中的噪聲點,減少雜質對算法的干擾,需要對灰度化處理后的圖像進行濾除噪聲點。平滑濾波主要有基于頻率域和空間域兩大處理方法,基于頻率域和空間域的去噪方法雖都是去除圖像中的噪聲來平滑圖像,但兩者的處理方法不盡相同。頻率域是先把圖像轉換到頻率域中,利用濾波器消除噪聲,而空間域是直接利用圖像中像素點間的關系去除干擾。空間域濾波方法算法簡單且實用性相對較強,本文針對空間域濾波中常見的兩種去噪方法即中值濾波和高斯濾波進行介紹。中值濾波方法算法簡單,空間復雜度低,在有效地消除椒鹽噪聲和尖銳噪聲的影響的同時又可以很好地保留道路圖像中的邊緣信息;高斯濾波尺度參數難以調整,算法相對來說比較復雜,容易造成道路圖像失真。由于高速公路上的無人駕駛汽車對采集的圖像穩定性要求較高,故本文采用基于中值濾波的去噪方法進行去噪。
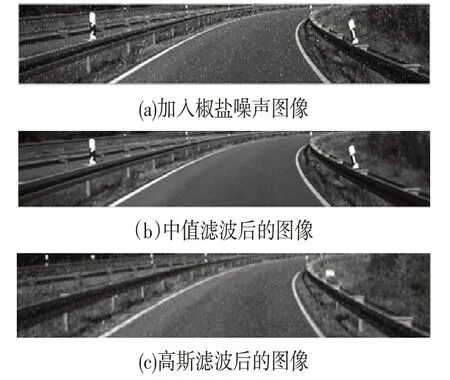
圖4 平滑濾波圖像
濾波圖像如圖4所示。圖4(a)為加入椒鹽噪聲圖像,圖4(b)為中值濾波后的圖像,圖4(c)為高斯濾波后的圖像,由(a)、(b)、(c)三張對比圖可以看出中值濾波的去噪效果最好,在去除噪聲的同時還清晰地保留了車道線的邊緣信息。
(四)車道線邊緣點提取。在對道路圖像進行平滑濾波并進行二值化操作之后,圖像中的絕大部分噪聲都被去除,且車道線邊緣信息被很好地保留,要對車道線邊緣點進行提取。在對邊緣點進行提取之前要先確定車道線對應的區域,首先計算感興趣區域中所有連通區域的面積,并按從小到大的順序進行排序,刪除連通區域面積小于X的連通區域,這里X的取值不一樣得到的結果也不相同,經大量實驗本文選取X=100。刪除小面積區域獲取的圖像如圖5所示。在此基礎上,選出面積最大的三個區域,其中兩個連通區域就是左右車道線所在的區域,這為車道線邊緣點提取打下了基礎,節省了搜索車道線邊緣點所需要的時間,提高了算法處理的速度。經過圖像預處理之后,形成的兩條車道線邊緣更加明顯,由路面到車道線和車道線到路面會有灰度值的變化,即灰度值由低到高再由高到低。從灰度值的變化進行相關處理可以獲取到梯度幅值。即對平滑處理之后的圖像進行Sobel邊緣檢測,并將一個如圖6所示的3×3的相鄰像素與橫向Sobel算子進行平面卷積操作[9],其公式見式(2)所示。


圖5 刪除小面積區域圖

圖6 3×3相鄰像素圖
如圖7所示,掃描道路圖像,提取出邊緣點,步驟如下:從經過預處理之后的道路圖像的最底端的中間部分向左右兩邊進行逐行掃描,遍歷每一行像素點如果像素點的幅值大于邊緣閾值T_edge,且檢測到邊緣點之后有連續多個像素點的幅值均大于邊緣閾值T_edge,取其中最大的像素點作為邊緣點,記為POS,其他點為0。其中T_edge值由實驗獲得,獲得車道線邊緣點。提取到的車道線邊緣點圖像如圖8所示。

圖7 車道線邊緣點圖

圖8 車道線邊緣點提取圖
(五)逆透視變換。車載相機采集到的道路圖像或多或少的都具有透視效果,即整個車道呈現近大遠小的特性,實際拍到的梯形路面也因為有透視效果而以矩形的形狀成像。逆透視變換(Inverse Perspective Mapping,IPM)是透視變換的逆過程,其主要實現的是坐標系之間點與點的轉換,要實現這一轉換需要借助車載相機的內外參數以及逆透視變換公式。世界坐標系、相機坐標系以及圖像坐標系之間變換的關系如圖9所示。

圖9 坐標系變換圖
點與點之間的變換關系如式(3)所示。其中:M1M2是相機的內部參數矩陣,由相機自身的內部參數焦距和光學中心所決定;M3為相機的外部參數矩陣,其中f為相機坐標系與平面坐標系之間的位移,R為旋轉矩陣,t為世界坐標系與相機坐標系之間的位移;ZC為計算得出的系數。令M=M1M2M3,則有式(4)。

通過對車載相機進行標定以及對其擺放位置進行測量即可得到相機的相關參數,從而獲得轉換矩陣M,繼而得到路面上點與圖像平面上點的對應關系。
三、車道線檢測
本文進行車道線彎道檢測所使用的單幀圖片均是取自結構化的高速公路,高速公路上的道路標識線清晰且與路面的灰度化區別較大,因此在圖像預處理去除大量冗余噪聲點后提取到車道線邊緣像素點,獲得像素點點集,再根據最小二乘法對點集中的點進行擬合得到車道線彎道。
(一)最小二乘法。對于車道線擬合來說,直線車道線比較容易擬合,而彎道車道線的擬合相對來說難度較大。目前常用的彎道擬合方法有:隨機采樣一致RANSAC法,貝塞爾曲線擬合法,基于最小二乘法的多項式擬合[10]。最小二乘法相對于其他彎道擬合方法來說,其優點是計算量小,所有的數據只需要遍歷一次,缺點是抗干擾能力差。但由于車道線圖像處理階段已經將大部分的噪聲濾除,檢測較為精確,避免了出現干擾很大的噪聲。故本文采用最小二乘法結合拋物線模型對車道線彎道進行擬合。最小二乘法[11]又叫做最小平方法,最小二乘法的原理是通過求解實際數據與理論數據之間誤差的平方和,并使這個平方和達到最小的多項式的系數,獲取多項式的表達式,而這個多項式就是需要的最佳匹配函數。一般直線或者曲線不可能穿過所有的觀測點,但是存在一條直線或者曲線使得數據點的理論值與真實值之間誤差的平方和達到最小,需要求的就是這條直線或曲線[12]。
已知(xi,yi)(i=1,2,3,…,n)是二維坐標系中的一組數據,對于曲線擬合,假設目標函數為(5)式:

令yi=f(xi),Ei表示在xi處由式(5)計算得到的理論值與實際值yi之間的誤差,則有式(6):

令Ei的平方和達到最小即可獲得aj的最佳估計值,即有令(7)式達到最小,

若要使(7)式達到最小,即令(7)式對aj求偏導,令其等于零,見(8)式。

得到計算a0,a1,…,an的線性方程組,見(9)式:

由計算得出曲線系數a0,a1,…,an進而得到擬合的曲線,擬合的多項式次數越高,擬合結果越精確,但隨之帶來的是計算量增加,故在實際應用中要兼顧兩者。
(二)基于最小二乘法的車道線擬合。前面部分的圖像處理的一些操作已經把大量的噪聲點去除并盡量多地提取出車道線邊緣信息,獲取車道線邊緣像素點集,將邊緣像素點集中的點進行擬合。設車道線方程為(10)式:

對提取出的車道線邊緣點進行逆透視變換使得其坐標由圖像坐標系中的點集O(Un,Vn)轉換成世界坐標系下的點集P(Xn,Yn),利用最小二乘法對點集中的點進行擬合,擬合函數為式(10)所示的函數模型,擬合結果如圖10所示。

圖10 擬合結果
四、實驗結果與分析
本文進行車道線彎道檢測所選取的是來自KITTI 數據集中的高速公路數據集,為驗證該算法能否準確有效地檢測并標記出車道線,利用Matlab2014b對視頻圖像中單幀圖像運用文中的算法進行處理并標記車道線,彎道車道線檢測的效果圖如圖11所示,選取圖像處理結果中的其中4 幀進行展示。從圖中可以看出本文所提出的彎道檢測算法可以很好地識別出彎道。在對擬合精度要求不是非常高的情況下,拋物線擬合足以實現彎道檢測的基本要求。

圖11 車道線彎道檢測圖
五、結語
為提高無人駕駛汽車的安全性和可靠性,本文針對高速公路上彎道部分相對直線部分難檢測提出一種新的車道線彎道檢測算法。基于高速公路上車道線與路面灰度值相差較大的特點,在提取的感興趣區域圖像中對圖像進行灰度化中值濾波去噪,邊緣檢測,提取梯度幅值點作為車道線擬合的像素點集,使用逆透視變換獲得車道坐標系下的點,最后利用拋物線模型用最小二乘法進行擬合。實驗表明,提出的算法具有較高的準確性和可靠性,具有廣泛的應用前景和實用價值。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
