基于全轉(zhuǎn)速范圍內(nèi)的直接轉(zhuǎn)矩控制調(diào)速系統(tǒng)的研究
2019-09-10 06:32:34沈靜靜楊玉嬌
綏化學(xué)院學(xué)報(bào) 2019年8期
關(guān)鍵詞:模型
沈靜靜 楊玉嬌
(1.安徽新華學(xué)院電子通信工程學(xué)院;2.安徽外國(guó)語(yǔ)學(xué)院 安徽合肥 230880)
直接轉(zhuǎn)矩系統(tǒng)不僅解決了矢量控制中所存在的計(jì)算量大的問題,還解決了電動(dòng)機(jī)參數(shù)變化范圍大的問題以及在某種程度上還分析了理論分析結(jié)果和實(shí)際的性能展現(xiàn)的差異問題[1],此外,該系統(tǒng)能夠較好的被控制,而且其體現(xiàn)出快速的動(dòng)態(tài)響應(yīng)。其通過采用雙滯環(huán)的控制方法,使得電機(jī)在整體運(yùn)行的過程中經(jīng)過轉(zhuǎn)矩和定子的聯(lián)動(dòng)從而對(duì)電機(jī)在實(shí)際運(yùn)行的穩(wěn)定性而造成相關(guān)方面的影響。所以研究的焦點(diǎn)大都集中在減小轉(zhuǎn)矩及定子磁鏈脈動(dòng)上[2]。為了提高定子磁鏈的估計(jì)精度,改善直接轉(zhuǎn)矩控制系統(tǒng)的動(dòng)靜態(tài)性能等,提出了多種行之有效的減小脈動(dòng)方法[3]。在直接轉(zhuǎn)矩的調(diào)速控制方面,有同步轉(zhuǎn)速以下恒轉(zhuǎn)矩調(diào)速的研究[4],也有基于弱磁范圍內(nèi)的速度控制等,但基于全速度范圍內(nèi)的控制仿真研究還不多見。本文通過建立一種直接轉(zhuǎn)矩控制的感應(yīng)電動(dòng)機(jī)變頻調(diào)速系統(tǒng)仿真模型,來實(shí)現(xiàn)電動(dòng)機(jī)全轉(zhuǎn)速范圍內(nèi)的速度控制。所謂全轉(zhuǎn)速范圍,是指電動(dòng)機(jī)調(diào)速系統(tǒng)既可以實(shí)現(xiàn)同步轉(zhuǎn)速以下的恒轉(zhuǎn)矩調(diào)速[5],又可以實(shí)現(xiàn)弱磁范圍內(nèi)的恒功率調(diào)節(jié),而且能實(shí)現(xiàn)轉(zhuǎn)速的四象限運(yùn)行特性。
一、直接轉(zhuǎn)矩控制調(diào)速系統(tǒng)的建模
直接轉(zhuǎn)矩控制[6](Direct Torque Control,DTC),是基于動(dòng)態(tài)模型的雙閉環(huán)控制系統(tǒng)。外環(huán)采用轉(zhuǎn)速閉環(huán),控制轉(zhuǎn)速的大小;內(nèi)環(huán)采用磁鏈和轉(zhuǎn)矩滯環(huán)比較控制,產(chǎn)生轉(zhuǎn)矩的快速動(dòng)態(tài)響應(yīng)。
(一)磁鏈與轉(zhuǎn)矩的控制。為了實(shí)現(xiàn)磁鏈和轉(zhuǎn)矩滯環(huán)的閉環(huán)控制[7],通常是通過異步電動(dòng)機(jī)的電磁轉(zhuǎn)矩值,再獲得其定子磁鏈,磁鏈觀測(cè)和轉(zhuǎn)矩觀測(cè)通常采用的數(shù)學(xué)表達(dá)式為:

式中:ψs(t)為定子磁鏈,us(t)為定子相電壓,is(t)為定子相電流,Rs為定子電阻,P為電機(jī)極對(duì)數(shù),ψsa,sβ為定子磁鏈在ab坐標(biāo)軸上[8]的分量,isα,sβ為定子電流在αβ坐標(biāo)軸上的分量。

圖1 磁鏈、轉(zhuǎn)矩滯環(huán)調(diào)節(jié)器
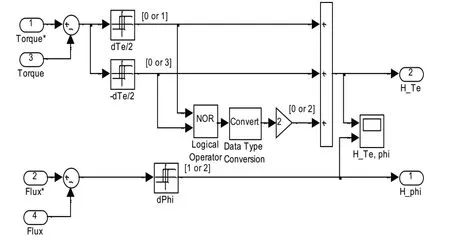
圖2 轉(zhuǎn)矩和磁鏈滯環(huán)調(diào)節(jié)器的仿真模型

圖3 磁鏈圓扇區(qū)的劃分
磁鏈、轉(zhuǎn)矩控制仿真模型如圖2所示,其中其仿真模型中有兩個(gè)滯環(huán)比較器[9],將其相加之后與邏輯運(yùn)算符(NOR)異或,將異或得到的結(jié)果通過數(shù)據(jù)類型轉(zhuǎn)換(Convert),與乘法器相乘之后得到運(yùn)算結(jié)果是0或2。模型當(dāng)中需設(shè)定相關(guān)值,比如,我們需將磁鏈滯環(huán)寬Fbm和轉(zhuǎn)矩滯環(huán)環(huán)寬Tbw分別設(shè)定為0.02Wb和10N.m。磁鏈和轉(zhuǎn)矩滯環(huán)比較輸出為H_Te和H_phi。

圖4 轉(zhuǎn)矩和磁鏈觀測(cè)及磁鏈角計(jì)算仿真模型
圖4為轉(zhuǎn)矩和磁鏈觀測(cè)及磁鏈角計(jì)算仿真模型。逆變器輸出的三相電壓ua,b,c進(jìn)行3/2。
首先通過變換可以得到usα、usβ,ia,b,c進(jìn)行3/2變換得到isα、isβ,再經(jīng)過離散積分模塊的計(jì)算從而得到定子的磁鏈值,分別為:ψsα和ψsβ。并且由(2)式可得通過兩個(gè)乘法器模塊和一個(gè)加法器模塊[10],從而可得到實(shí)際轉(zhuǎn)矩值Te。
再利用定子磁鏈值ψsα和ψsβ,從而能夠分別得到磁鏈幅值Ys和磁鏈角q。圖4采用簡(jiǎn)化的計(jì)算方法將定子磁鏈分量ysa、ysb得到一個(gè)復(fù)數(shù)值[11],并分別通過求復(fù)數(shù)值模塊和求復(fù)角模塊兩個(gè)部分得到輸出磁鏈幅值ψs和磁鏈角θ。
(二)定子磁鏈扇區(qū)的計(jì)算。定子磁鏈扇區(qū)將磁鏈圓等分為六等份,每個(gè)扇區(qū)間隔60o,用Sn表示,定子電壓矢量和扇區(qū)的劃分如圖4所示。磁鏈角的初始線(q=0)與電壓矢量U1(100)的方向相同,扇區(qū)S1確定為U1(100)的方向線±30o的扇形區(qū)域,S2定為U2(110)的方向線±30o的扇形區(qū)域,以此類推可定義出六個(gè)扇區(qū)S1-S6。
其中圖5是磁鏈扇區(qū)的計(jì)算模型,圖5中所示的6個(gè)扇區(qū)通過關(guān)系比較模塊和邏輯運(yùn)算模塊來進(jìn)行判斷[11]。通過仿真得到磁鏈角取值區(qū)間為:[-180o,+180o],從而使得扇區(qū)S4的所計(jì)算得到的范圍為q>150o和q≤-150o,磁鏈角的區(qū)間和扇區(qū)S4的關(guān)系為“或”的關(guān)系,其它扇區(qū)的關(guān)系均為“與”的關(guān)系。

圖5 磁鏈扇區(qū)的計(jì)算模型
(三)開關(guān)選擇表的建立。首先設(shè)定扇區(qū)S1是定子磁鏈,且扇區(qū)S1運(yùn)行方向是逆時(shí)針方向。在實(shí)際運(yùn)行過程中,當(dāng)磁鏈達(dá)到最小值時(shí),△ψ>0,Hψ=1,需要通過非零電壓矢量的方法來提高磁鏈,這時(shí)有兩種不同的情況:(1)當(dāng)電磁轉(zhuǎn)矩幅值為最小值時(shí),DT>0,HTe=1,則選取電壓矢量U2(110),從而不僅增加了轉(zhuǎn)矩還增加了磁鏈;(2)當(dāng)電磁轉(zhuǎn)矩幅值達(dá)到最大值時(shí),DT<0,HTe=3,則用電壓矢量U6(101),從而既增加磁鏈又減少轉(zhuǎn)矩。如果此時(shí)DT=0,HTe=2,可以插入零電壓矢量U0或U7。從而來得到異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的電壓開關(guān)矢量選擇表(見表1),其中以減少開關(guān)的切換次數(shù)從而來選擇零電壓U0、U7的值。
電壓矢量U0~U7對(duì)應(yīng)逆變器六只開關(guān)器件的開關(guān)狀態(tài)如表2所示。三相逆變器的開關(guān)狀態(tài)順序分別為[a+,a-,b+,b-,c+,c-],例如[1,0,0,1,1,0],表示a相上橋臂、b相下橋臂、c相上橋臂開通,a相下橋臂、b相上橋臂、c相下橋臂關(guān)斷。
開關(guān)選擇表是通過兩個(gè)二維的查表函數(shù)來實(shí)現(xiàn)的,其仿真模型如圖6所示。當(dāng)△ψ>0,Hψ=1 時(shí),默認(rèn)選擇第一個(gè)查表函數(shù);當(dāng)△ψ<0,Hψ=2時(shí),默認(rèn)選擇第二個(gè)查表函數(shù)。其中兩個(gè)查表函數(shù)(lookup2D)中的參數(shù)通過相對(duì)應(yīng)的開關(guān)表來進(jìn)行相關(guān)的設(shè)置,通常被設(shè)置成3行6列的矩陣,矩陣的輸出是填與上述的開關(guān)表所對(duì)應(yīng)的電壓矢量值:0~7。此外,我們逐步確定HY(磁鏈偏差)、HTe(轉(zhuǎn)矩偏差)和Sn(扇區(qū))之后,就可以得到唯一確定的電壓矢量值,并通過將所確定的矢量值加1之后與多路轉(zhuǎn)換開關(guān)(Multiport switch)連接,這個(gè)過程使得電壓矢量值轉(zhuǎn)換成逆變器的開關(guān)狀態(tài),這就是我們常說的6路PWM脈沖[11]。

圖6 開關(guān)選擇表的仿真模型

表1 電壓矢量開關(guān)選擇表
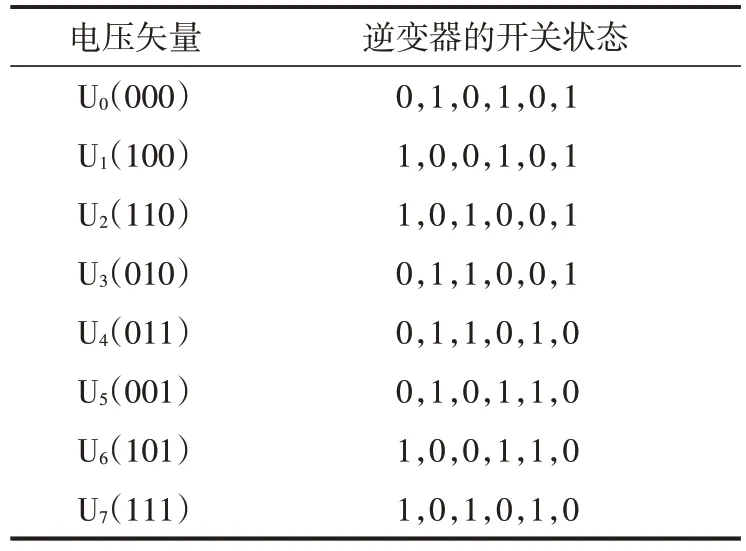
表2 電壓矢量與開關(guān)狀態(tài)對(duì)應(yīng)關(guān)系
(四)速度控制器。在直接轉(zhuǎn)矩控制系統(tǒng)中的重要的一個(gè)部分就是速度控制器,速度控制器中的速度調(diào)節(jié)器通常采用帶有飽和特性和帶輸出限幅的PI調(diào)節(jié)器。速度調(diào)節(jié)器中的速度給定值n*先通過Rate Limiter模塊也就是速度變化率限制模塊進(jìn)行相關(guān)性能的處理,一般速度變化率的變換范圍設(shè)為[-900,900rpm/s],并且要與實(shí)際速度n進(jìn)行相關(guān)方面的比較,PI調(diào)節(jié)器的輸入是速度的偏差信號(hào),此外由于PI調(diào)節(jié)器中的積分器采用的是Discrete-Time Integrator模塊,離散時(shí)間積分器的采樣時(shí)間是離散信號(hào),所以在采樣的時(shí)候,采樣時(shí)間一般被設(shè)為采樣時(shí)間的7倍,這樣的采樣方法可以適當(dāng)增加仿真的速度,再將其輸出接入數(shù)據(jù)采樣率的轉(zhuǎn)換模塊,數(shù)據(jù)轉(zhuǎn)換模塊可將上述的離散采樣時(shí)間轉(zhuǎn)換成系統(tǒng)采樣時(shí)間Ts。最后,PI調(diào)節(jié)器的輸出通常作為轉(zhuǎn)矩的給定值[11]。電動(dòng)機(jī)的同步轉(zhuǎn)速n0=1500rpm,其定子磁鏈給定值的設(shè)定原則為同步轉(zhuǎn)速以下。

圖7 速度控制器
設(shè)定為額定磁鏈F0=0.8Wb,同步轉(zhuǎn)速以上設(shè)為弱磁控制,其設(shè)置由查表函數(shù)(Lookup)來實(shí)現(xiàn)。查表函數(shù)(Lookup)的參數(shù)設(shè)置如下:
轉(zhuǎn)速:[0;300;600;900;1200;1500;1700;2000;2500];
磁鏈:[F0;F0;F0;F0;F0;F0;0.90 F0;0.72 F0;0.51 F0]。
二、直接轉(zhuǎn)矩控制調(diào)速系統(tǒng)的仿真
通過分析了上述的各分支模塊,建立了如圖8所示的含有速度閉環(huán)的直接轉(zhuǎn)矩控制調(diào)速控制系統(tǒng)。
直接轉(zhuǎn)矩控制分支模塊包括速度控制器(Speed Controller)、磁鏈和轉(zhuǎn)矩計(jì)算(Torque&Flux calculator)、磁鏈和轉(zhuǎn)矩滯環(huán)比較器(Flux&Torque hysteresis)、磁鏈扇區(qū)計(jì)算(Flux sector calculator)、開關(guān)表模塊(Switching table)等。
系統(tǒng)仿真相關(guān)性能參數(shù)設(shè)置值為:
電動(dòng)機(jī)相關(guān)參數(shù)設(shè)為:直流電源電壓為:600V;額定磁鏈:F0=0.8Wb,Rs=14.85mW,Rr=9.295mW,Ls=0.3027mH,Lm=10.46mH,Lr=0.3027mH;額定電壓UN=380V;額定功率PN=100kW;額定頻率fN=50Hz;極對(duì)數(shù)P=2,J=0.01kg.m2。
控制系統(tǒng)參數(shù):速度PI調(diào)節(jié)器中的比例調(diào)節(jié)系數(shù)kp=30,積分調(diào)節(jié)的系數(shù)ki=200,其中速度在變化調(diào)節(jié)的過程中設(shè)置其變化斜率的范圍是給定最大變化斜率為[-900,+900]rpm/s,100Hz是速度相關(guān)測(cè)量值的低通截止頻率。轉(zhuǎn)矩環(huán)寬:Tbw=10N.m,磁鏈的環(huán)寬的設(shè)定值為:Fbw=0.02Wb,且轉(zhuǎn)矩的范圍為-1200~+1200N.m。
(一)同步轉(zhuǎn)速以下的恒轉(zhuǎn)矩控制仿真。速度的初始值設(shè)置為:n*=800rpm,且在設(shè)定的時(shí)間為2s 時(shí)n*=-800rpm;TL=0是負(fù)載轉(zhuǎn)矩設(shè)置的初始值,在時(shí)間t等于1.5s時(shí),負(fù)載轉(zhuǎn)矩增加到700N.m。
直接轉(zhuǎn)矩控制系統(tǒng)在同步轉(zhuǎn)速以下的仿真結(jié)果如圖9所示。圖9中所示的分別是定子電流ia、轉(zhuǎn)速n、電磁轉(zhuǎn)矩Te在圖8的模型中仿真出來的波形。從圖8中可以看出,電動(dòng)機(jī)在正向啟動(dòng)之后,轉(zhuǎn)速呈現(xiàn)出線性增加的現(xiàn)象,在t=0.8s時(shí),轉(zhuǎn)速增加到最大值:n*=800rpm,然后電動(dòng)機(jī)一直持續(xù)到t=2s 時(shí)一直處于穩(wěn)定運(yùn)行的狀態(tài),在t=2s 之后,電動(dòng)機(jī)開始減速,并逐步減到速度為0的狀態(tài)并開始了反向加速的狀態(tài),并反向加速到800rpm,整個(gè)過程中,從仿真波形中可以看出,轉(zhuǎn)速十分平滑,未出現(xiàn)抖動(dòng)和超調(diào)的不良現(xiàn)象,從而準(zhǔn)確地實(shí)現(xiàn)了電動(dòng)機(jī)調(diào)速的四象限特性。
(二)同步轉(zhuǎn)速以上的弱磁控制仿真。如圖10仿真波形結(jié)果所示,速度穩(wěn)定初始值n*=1200rpm,在t=2s時(shí)開始逐步線性改變?yōu)?500rpm;負(fù)載轉(zhuǎn)矩在t=0 時(shí),負(fù)載轉(zhuǎn)矩的值為0,然后開始逐步增加,在t=1.4s 時(shí)間范圍內(nèi),一直在TL=300N.m 上下浮動(dòng),在 t=1.5s 時(shí),加載到 TL=700N.m 上下波動(dòng),且在t=2s秒時(shí),逐步增加轉(zhuǎn)矩的最大值TL=1000N.m上下浮動(dòng),并在t=3.5s秒之后轉(zhuǎn)矩值下降到700N.m。
在同步轉(zhuǎn)速以上的仿真結(jié)果如圖10所示。從仿真波形中的轉(zhuǎn)速波形中可得到,轉(zhuǎn)速給定n*=1200rpm,電動(dòng)機(jī)正向啟動(dòng),轉(zhuǎn)速線性增加至1200rpm,電動(dòng)機(jī)處于穩(wěn)定運(yùn)行階段。在t=2s,n*=2500rpm,電動(dòng)機(jī)開始加速至t=3.5s 達(dá)到新的穩(wěn)定轉(zhuǎn)速n=2500rpm,此時(shí)電動(dòng)機(jī)工作于弱磁狀態(tài),在同步轉(zhuǎn)速以上的調(diào)速過程中,也無抖動(dòng)和超調(diào)現(xiàn)象,調(diào)節(jié)非常平滑,很好地實(shí)現(xiàn)了電動(dòng)機(jī)弱磁調(diào)速控制。弱磁調(diào)速定子磁鏈軌跡如圖11(b)所示,定子磁鏈額定值為0.8Wb,當(dāng)轉(zhuǎn)速上升到2500rpm 時(shí),定子磁鏈幅值隨轉(zhuǎn)速的上升而下降至0.48Wb,磁鏈軌跡為逐漸內(nèi)縮的同心圓。
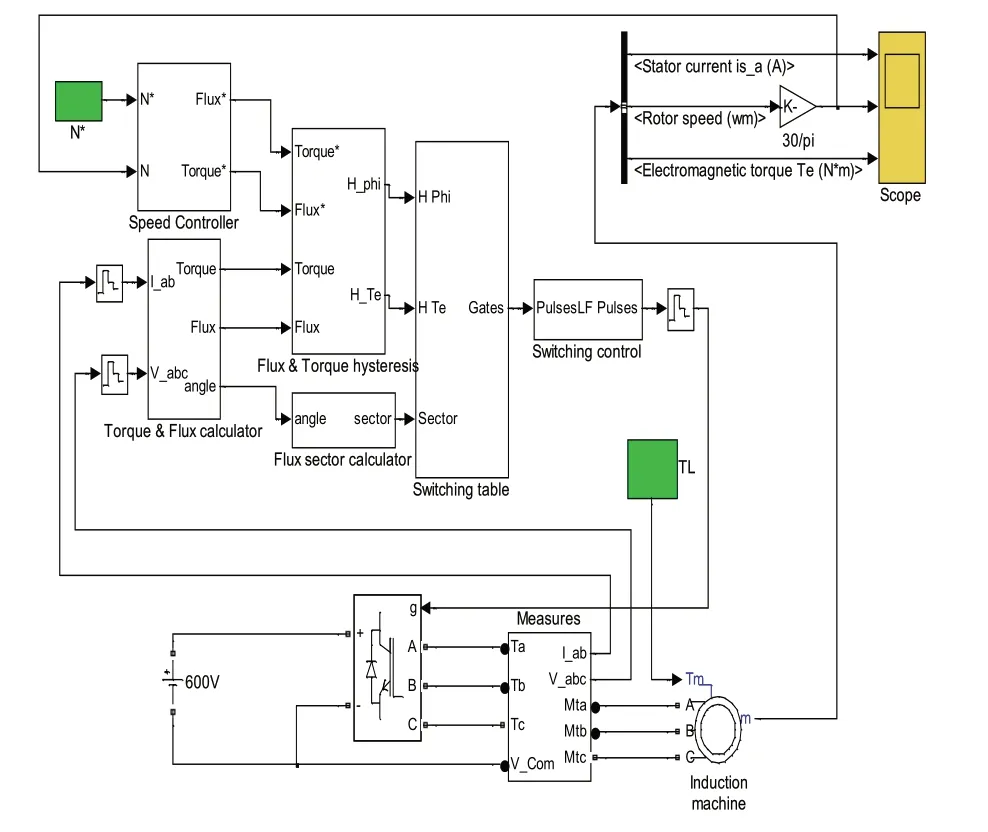
圖8 直接轉(zhuǎn)矩控制系統(tǒng)仿真模型
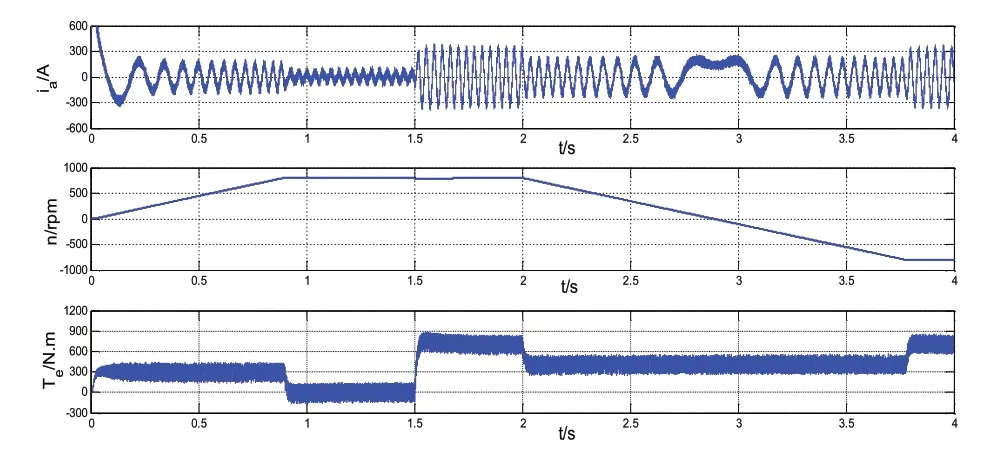
圖9 同步轉(zhuǎn)速以下的仿真結(jié)果
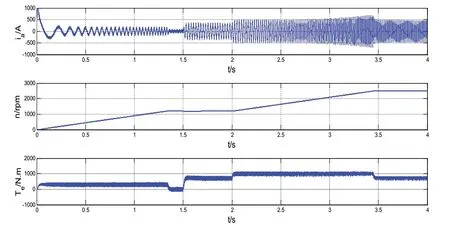
圖10 同步轉(zhuǎn)速以上的仿真結(jié)果
三、結(jié)論
由以上仿真結(jié)果可以看出:1.同步轉(zhuǎn)速以下的直接轉(zhuǎn)矩控制達(dá)到了定子磁鏈形成圓形磁鏈,幅值恒定,脈動(dòng)很小;可以將轉(zhuǎn)矩脈動(dòng)控制在設(shè)定的范圍內(nèi);調(diào)速性能良好,在換向調(diào)速過程中,無抖動(dòng)和超調(diào)現(xiàn)象,很好地實(shí)現(xiàn)了電動(dòng)機(jī)調(diào)速的四象限特性。2.弱磁環(huán)節(jié)的直接轉(zhuǎn)矩控制實(shí)現(xiàn)了電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩的恒功率控制;弱磁控制過程很平穩(wěn)。
由此可見,此仿真模型達(dá)到了理論所期望的磁鏈、轉(zhuǎn)矩及調(diào)速性能,而且仿真速度快,對(duì)研究全轉(zhuǎn)速范圍內(nèi)直接轉(zhuǎn)矩調(diào)速控制具有較好的參考價(jià)值。

圖11 定子磁鏈圓的軌跡
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
