三角翼飛行器滾轉運動隨機響應與控制
2019-07-25 08:29:16張永芳蔣貴榮
桂林電子科技大學學報 2019年2期
張永芳,蔣貴榮
(桂林電子科技大學 數學與計算科學學院,廣西 桂林 541004)
三角翼飛機(delta-wingairplane)是機翼前緣后掠、后緣基本平直、半翼俯視平面形狀為三角形的飛行器。三角翼機型有著廣泛的應用,如殲-8、米格-21、蘇-15殲擊機的平尾式三角翼飛機,“幻影”Ⅲ型殲擊機和“協和”式超音速客機等的無平尾式三角翼飛機。對于戰斗機而言,三角翼可以加強結構和氣動穩定性,從而提高生存率。
當飛機的攻角超過臨界角造成失速時,控制系統的累計誤差和外部環境等都會造成飛機失去平穩,而飛機的橫向運動會導致其失去平衡性與穩定性。飛機的穩定性是指在飛行中受外力干擾后不需要操作人員的干預,靠自身特性恢復原來狀態的能力。飛行器在飛行的過程中,往往電路系統、自動控制系統等內部因素會受到隨機干擾或風力、濕度、氣壓等外部因素影響飛行器的平穩性,所以在分析飛行器滾轉運動時,應該考慮這些隨機因素。
Elzebda等[1]對細長三角翼的亞音速機翼滾轉現象的3種模型進行了數值模擬,給出了修正后的運動方程的漸近逼近解,但未討論系統加入隨機的情況。Kori等[2]提出了一種基于擴展狀態觀測器(ESO)技術方法,對細長三角翼的滾轉運動進行魯棒控制,Chavatzopoulos等[3]利用不完整的神經網絡(PNN)來識別三角翼飛機的滾轉運動,他們所討論的是未考慮隨機因素的確定性方程。Luo等[4]利用Beecham-Titchener的平均方法,得到了滾轉運動抑制的最優控制輸入。陳永亮[5]提出非線性動力學特性分析與控制律設計的一體化設計思想,應用于飛機大迎角飛行時機翼搖晃抑制,揭示機翼搖晃的全局運動特性,但控制律過于復雜,并且抑制結果是在理想狀態下得出的。李春濤等[6]設計以滾轉角速率為內回路的滾轉角控制律,應用魯棒伺服LQR優化方法,得到滾轉角控制律參數,驗證以滾轉角速率為主控變量的控制器具有抗干擾能力,但其控制律過于復雜。楊利紅[7]對飛行器縱向、橫側向通道和速度通道進行控制仿真設計,得到相對簡單的滾轉角控制律,但無實例分析。徐孝誠等[8]用MSC/NASTRAN軟件對再入飛行器復雜結構軸向隨機振動試驗和橫向隨機振動試驗進行了響應分析,吳衛國等[9]對飛機起落架動力學模型進行求解與響應分析,但他們都未對三角翼飛行器滾轉運動隨機響應進行分析。
為此,考慮隨機因素的三角翼飛行器滾轉運動單自由度系統的隨機響應與控制問題,分析其穩定性。
1 飛行器滾轉運動模型
對于三角翼飛機單自由度滾轉運動,滾轉運動方程為
(1)
(2)
將式(2)代入系統(1),得
(3)
其中ω2=-ca1,μ1=ca2-D,b1=ca3,μ2=ca4,b2=ca5,μ3=c6a,ai(i=1,2,…,6)是關于迎角α的函數,參數值由表1給出。

表1 系統(3)中的參數
2 隨機響應分析
考慮高斯白噪聲下三角翼飛行器滾轉運動,其運動方程為


(4)
其中W(t)為譜密度為K的高斯白噪聲。
隨機系統(4)的恢復力u(φ)=ω2φ-b1φ3,其為非線性恢復力。由于幅值包線隨機平均要求系統的恢復力是線性的,系統(4)不能用幅值包線隨機平均方法討論隨機響應和穩定性。采用極坐標方法[10]處理系統(4),考慮極坐標變換:
x1=rcosθ,x2=rsinθ,
得到

b1r3sinθcos3θ+μ2r3sin2θcos2θ+
b2r3sin3θcosθ+μ3r3sin4θ+
rsin2θW(t)=f1(r,θ)+g1W(t),

b1r3cos4θ+μ2r3sinθcos3θ+
b2r3sin2θcos2θ+μ3r3sin3θcosθ-
sin2θ+sinθcosθW(t)=f2(r,θ)+g2W(t),
幅值r(t)與相位θ(t)構成一個矢量馬爾可夫擴散過程。應用隨機時間平均法,上式中的fi與gi(i=1,2)是以2π為周期的時間t的周期函數,可在一個周期上進行時間平均,
高斯白噪聲激勵下系統的漂移系數m(r)、擴散系數σ(r)為:
σ2(r)=2πK(〈g1g1〉t+〈g1g2〉t)。
其中:
則
(5)
(6)
由于平均后的幅值r(t)方程不含θ(t),光滑后的幅值r(t)為馬爾可夫擴散過程,受伊藤方程支配,
(7)
其中B(t)為單位維納過程,系統(7)為一維伊藤方程。幅值r(t)的平穩概率密度為
其中常數C為歸一化系數。
系統(7)對應的線性方程為
(8)
令Y(t)=lnr(t),用伊藤微分規則得到Y(t)的伊藤方程,
方程的解為
(9)
根據李雅普諾夫指數定義,可得到系統(9)的李雅普諾夫指數為
當λ>0,μ1/2+πK/4>0時,隨機微分方程(7)對應的線性方程的平凡解局部不穩定,因此隨機系統(4)在平衡點(0,0)處局部不穩定。
定理1假設下列條件成立:
其中μ1>0,譜密度K為非負,則隨機系統(4)在平衡點(0,0)處局部不穩定。
由表1知,當飛行器的迎角α>19.5°,μ1>0,因而λ>0,則隨機系統(4)在平衡點(0,0)處局部不穩定。隨著時間t的增加,飛行器滾轉運動將無法保持穩定。
3 滾轉運動的控制
在無人操作的情況下,飛行器自身調節達到平穩狀態,這就需要在飛行器上加入滾轉角的控制器。首先飛行器通過測量裝置測出實際滾轉角度,然后將所測信息傳輸給控制器,接著控制器對接收測量信息進行處理,當滾轉角大于期望角度范圍時,控制器將控制信號傳輸給副翼舵機系統,最后接到指令的副翼舵機系統調節副翼狀態,達到減小滾轉角的目的。采用的控制律為
其中:Kp為滾轉角傳感器信號;Kd為滾轉角速率傳感器信號;φh期望滾轉角。圖1為控制滾轉角的流程圖,其中eh為期望信號偏差,eh=φh-φ。
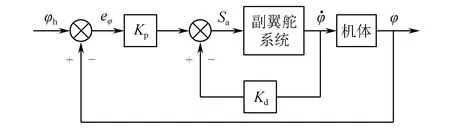
圖1 滾轉角控制流程圖
在飛行器橫向運動不穩定的狀態下,加入控制律得到

(10)
采用改進隨機平均方法[11],求系統(10)的一維幅值伊藤方程。
系統(10)的無阻尼自由振動為
(11)

g(φ)=ω2φ-b1φ3-Kpφ,
(12)
(13)
(14)
(15)

(16)
其中ν(A,t)為系統瞬時頻率。將方程(16)代入方程(14)可得
其中A為系統位移的幅值。將方程(16)代入方程(15),得到總能量EH,
幅值A與總能量EH的關系為
G(A)=G(-A)=EH。
通過能量平衡法獲得系統的平均頻率ω(A),代替該瞬時頻率ν(A,t)。當θ(t)=0時,
(17)
將平均頻率ω(A)代替瞬時頻率ν(A,t)代入方程(16),然后將所得結果代入方程(15),得到相關Hamilton系數EH,θ=ωt。因此,可得到殘余項
R(t)=EH,θ=ωt-EH,θ=0,
(18)
考慮方程(16)是系統(10)的一個近似解,所以R不可能總為0值。
當ωt=π/4時,
(19)
方程(19)與式(17)相減,得到余項式

(20)
考慮輸入總能量與輸出總能量近似相等,令
(21)
將方程(17)、(19)、(20)代入方程(21)進行求解,可得到其等效的平均頻率ω(A),
將其代替瞬時頻率ν(A,t),得到近似方程解
θ(t)=ω(A)t+φ(t),
其中φ(t)為相位。
通過對系統(10)的完全轉換化解,可以得到如下方程:
其中:

μ2A3ω(A)2sin2θcos2θ-
b2A3ω(A)3sin3θcosθ+μ3A3ω(A)4sin4θ+
Kpφrω(A)sinθ+KdAω(A)2sin2θ],

μ2A3ω(A)2sinθcos3θ-
b2A3ω(A)3sin2θcos2θ+
μ3A3ω(A)4sin3θcosθ+Kpφrω(A)cosθ+
KdAω(A)2sinθcosθ],


實施控制后的幅值伊藤方程為
dA=m(A)dt+σ(A)dB(t),
(22)
其中漂移系數m(A)與擴散系數σ(A)為:

系統(22)的平穩概率密度為

[4(ω2-Kp)-3b1A2]δ1Aδ2
其中:
系統(22)對應的線性方程為
(23)
令Y(t)=ln[A(t)],利用伊藤微分規則得到Y(t)的伊藤方程:
則其解為

根據李雅普諾夫指數定義,可得到系統(15)的李雅普諾夫指數
當λ<0,Kd>μ1+πK/2時,隨機微分方程(7)對應的線性方程的平凡解局部穩定,因此,隨機系統(4)在平衡點(0,0)處局部穩定。
定理2假設下列條件成立:
其中μ1為正值,譜密度K為非負,Kd為遠大于μ1的正值,則隨機系統(4)在平衡點(0,0)處局部穩定。
當α>19.5°時,有μ1>0,當Kd>μ1+πK/2時,系統(10)的李雅普諾夫指數
則隨機系統(10)在平衡點(0,0)處局部穩定,飛行器在受到隨機干擾的情況下,通過控制器的調節,飛行器的滾轉運動由原來的不穩定狀態變為穩定狀態。
4 結束語
利用隨機微分方程,建立具有速度參激的三角翼飛行器滾轉運動模型,采用極坐標法、時間平均法與伊藤微分規則將隨機系統化為一維伊藤方程,得到系統的平穩概率密度和隨機系統不穩定的充分條件。建立加入控制律的滾轉運動新模型,采用改進時間平均法與伊藤微分規則,將系統化為一維伊藤方程,得到系統穩定的充分條件,為三角翼飛行器滾轉運動的控制提供理論依據。在此條件下,對于系統可能出現的分岔行為,有待進一步研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
