大尺寸位移測量分析系統標定方法研究
2019-04-09 05:57:42王曉鑫郭永波高戰朋
工程與試驗 2019年1期
王曉鑫,郭永波,高戰朋
(中國飛機強度研究所 全尺寸飛機結構靜力/疲勞實驗室,陜西 西安 710065)
1 引 言
大尺寸位移測量分析系統(即攝像位移測量系統),是通過專用的測量攝像機,在不同位置和方向獲取被測工件的兩幅或者多幅數字圖像,經圖像預處理、標志識別、圖像匹配、空間三角交會及光束法平差后得到待測點的三維坐標的位移測量系統[1-2]。根據國軍標GJB 67.9A-2008中“3.1.9 試驗測量儀器”要求:測試儀器應按規定進行校準/檢定,并在有效期內使用[3]。對于新研制的非標測量設備,首次使用前,需要進行實驗室精度校驗,并在使用現場進行自校驗。
目前,國內外還沒有標準的大尺寸位移測量分析系統標定方法。這是由于在系統中,攝像機參數、基準尺、攝像機間距(攝影基線)、測量基站與被測物體距離(攝影距離)等因素都將影響攝影位移測量的精度,目前還沒有一個標準的檢定方法可以將各種誤差影響因子進行整合[4-5]。因此,本文對大尺寸位移測量分析系統的標定方法進行了研究,針對在設備研制、驗收及使用過程中[6],如何有效地對大尺寸位移測量分析系統進行標定的問題,提出了一種標定方法。
2 大尺寸位移測量分析系統組成
大尺寸位移測量分析系統包括圖像采集儀(攝像機)、圖像采集控制器、基準尺、靶標等,工作時通過圖像采集儀對測量對象進行攝影,再通過采集處理圖像、計算分析測量結果從而獲得被測對象的三維坐標值。目前,該系統是由8臺攝像機組成的三維光學圖像測量系統,其基本測量單元是由2臺攝像機組成的測量分系統,即整個大尺寸位移測量系統由4套雙攝像機測量分系統組合而成。這4套測量分系統既可以單獨使用,又可以組合使用,如圖1所示。
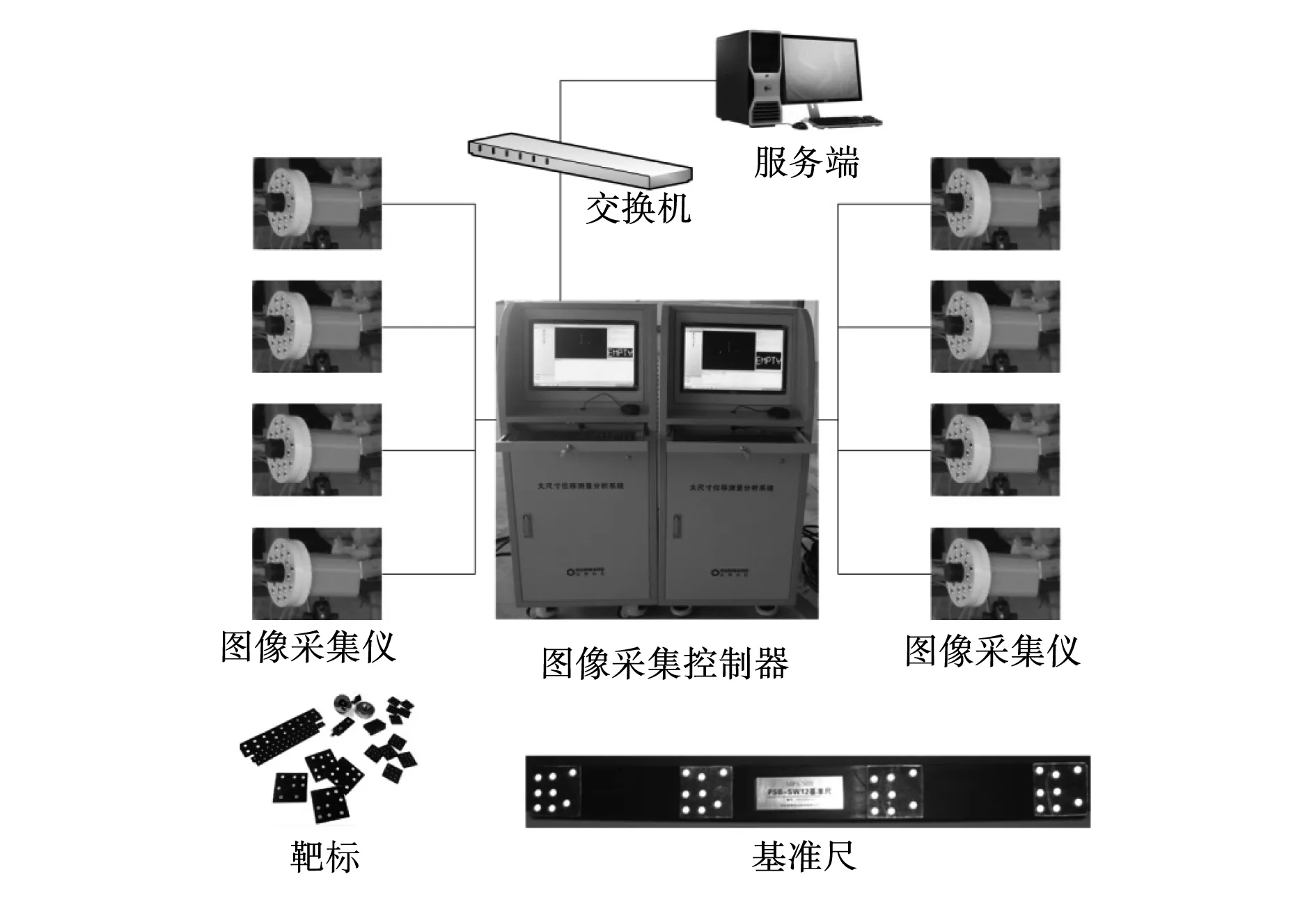
圖1 系統組成結構圖
3 大尺寸位移測量分析系統標定總體思路
為了解決系統必須標定的問題,確定了系統標定總體思路:
(1)對系統的主要部件(攝像機和基準尺)進行校準;
(2)對產生系統誤差的主要因素進行理論分析,得到系統的誤差分布;
(3)通過對系統視場空間范圍內各典型位置的測量,得到全視場誤差分布;
(4)進行實驗室計量標定,驗證系統誤差分布的準確性,確保系統的測量誤差總是在系統許可誤差之內,從而實現對系統的標定,使其滿足飛機強度試驗的測量精度要求。
4 大尺寸位移測量分析系統標定方法
4.1 圖像采集設備精度
(1)基準尺校準
基準尺是照相位移測量系統基準,基準尺經中國計量院進行校準,校準精度為誤差不大于0.01mm。
(2)圖像采集儀(相機)參數校準
相機的結構參數和相機與鏡頭的內部結構有關,在不發生損害的情況下,一般比較穩定。通常一年標定一次(相機內部參數校準的整體誤差為0.35μm)。
4.2 系統誤差分析
由于大尺寸位移測量分析系統的基本測量單元為由2臺攝像機組成的測量分系統,因此整個大尺寸位移測量系統的測量誤差可以按照雙攝像機攝影測量來進行。雙攝像機測量分系統的兩個攝像機的攝影方式可以近似為正直攝影,所以可以用正直攝影的公式來推導系統的一個理論精度[7]。雙攝像機前方交會示意圖如圖2所示。

圖2 雙攝像機前方交會示意圖
由圖可知,系統的誤差與攝影基線B和攝影距離D有關。由于在不同的測量環境,兩者都會發生變化,所以系統的誤差不是一個固定的值。在使用過程中,測量的三維坐標也不一定都平行于正向和縱深方向。因此,將系統的精度用最大誤差的概念來表達,保證系統測量的數據都在最大誤差的允許范圍內。
本系統中所使用攝像機(Vieworks VH-4MG)的具體參數見表1。

表1 攝像機具體參數
若取系統測量的邊界條件,被測對象范圍為5m,攝影距離為10m。用最大的誤差來表征系統的測量精度,在測量最差的情況下系統的最大絕對誤差為1.3mm。
4.3 大尺寸位移測量系統的標定方法
大尺寸位移測量系統的標定,是將標準的坐標量接入被標定系統,系統對視場中相同點的三維坐標進行測量并輸出相關的測量結果數據,最終將系統輸出的位移數據與標準給出數據比對分析,實現此類系統標定。標定原理方框圖如圖3所示,主要分為3個部分:標準器單元、大尺寸位移測量分析系統、數據處理輸出。標準器單元包含基準尺和光柵尺,經過中國計量院進行校準。大尺寸位移測量系統完成圖像的采集、控制和計算。最終將數據進行處理和輸出,同時與標準數據進行對比。

圖3 大尺寸位移測量系統標定原理方框圖
4.3.1 大尺寸位移測量系統標定方法
分別使用大尺寸位移測量系統和經過計量校準的激光跟蹤儀(全站儀或其他標準設備及配套儀器),同時測量各靶標的三維坐標,以激光跟蹤儀(全站儀或其他標準設備及配套儀器)的測量結果為基準,對比兩套系統的測量結果,給出系統誤差。
4.3.2 大尺寸位移測量系統標定方法遵循的幾項原則
(1)圖像采集儀遵循的原則:在系統所有配置的圖像采集儀中,第一次每兩個進行配對,共分4組,進行校準,確保每個圖像采集儀被抽到一次。在第二次抽取過程中,4組圖像采集儀中任意抽取第一次抽取時不在同一組的兩個圖像采集儀進行組合校準。
(2)標定點選取原則:根據攝影測量誤差分布原則,在正向偏離攝像機視場中心越遠,在徑向離攝像機越遠,系統的測量誤差越大。因此,標定點選取以系統視區最遠位置為標定平面,在盡量處于攝像機視場邊緣的有效量程范圍內,通過徑向(前、中、后)、正向(左、中、右)、垂向(下、中、上),選擇不少于18個標定點設置靶標(含零點,各方向上6個,需均勻分布)。
4.3.3 數據處理及計算
對比各標定點處兩套系統的測量結果,分別求出各點的測量誤差,以其中最大值作為圖像采集儀的測量誤差;以所有抽檢圖像采集儀中測量誤差最大值作為系統測量誤差。
(1)計算系統測量誤差
對各測量點三維坐標的誤差分別進行計算,以采集數據值X為例,計算公式如下:
(1)
其中:
(2)
(3)

按公式分別求出各點的測量誤差,以其中最大值作為圖像采集儀的測量誤差;以所有抽檢圖像采集儀中測量誤差最大值作為系統測量誤差。
(2)系統線性度計算
按照端基直線法,沿正向、垂向、徑向3個方向通過激光側距儀給出6個標準線性坐標值,通過以下原理對各方向上的線性度進行計算。計算公式如下:
(4)

按公式分別求出各點的線性度,以其中最大值作為該組圖像采集儀的線性度;以所有抽檢組圖像采集儀線性度最大值作為系統線性度。
(3)零漂的計算
(5)
其中,最大零漂誤差為圖像采集儀零點每次記錄值與第一次記錄值之差絕對值的最大值;按公式分別求出各通道的零漂誤差,以其中最大值作為系統零漂誤差。
4.4 實驗室標定方法
由于三維空間標定比較困難,將三維坐標分解為正面方向的平面內變化和縱深方向的變化,分別從正面方向和縱深方向來進行標定。
4.4.1 實驗室標定環境
將兩個相機擺放到距離標準平臺B1的位置,相機之間距離D1。定位相機的相對位置和姿態,使相機連線與滑塊移動方向平行,進行正面方向標定。將兩個攝像機擺放到距離標準平臺末端B2的位置,攝像機間距離D2,定位相機的相對位置和姿態,使相機連線與滑塊移動方向垂直,進行縱深方向標定。標定環境見圖4。

圖4 實驗室標定環境圖
在測量起始位置對標準設備(WCX-3000位移傳感器校準裝置,測量精度:≤0.02%FS,最小位移分辨率:0.005 mm)和大尺寸位移測量系統同時清零后,在標準設備測量范圍內移動滑塊,產生相對位移,對比系統的測量值,計算誤差。
4.4.2 標定結果
對大尺寸位移測量分析系統進行實驗室標定,標定數據見表2。在標準設備滿量程(3m)處最大測量誤差為0.98mm,系統精度優于0.05%。

表2 實驗室標定數據 單位:mm
4.5 標定方法誤差分析
本方法是在正直攝影條件下得到的理論誤差分析結果基礎上進行系統標定方法研究,對大位移測量系統誤差進行評估,影響攝影測量的誤差主要由長度誤差、形面誤差及坐標誤差組成,非正直攝影條件下的系統測量誤差分布情況是否與正直攝影條件下誤差分布一致,需要進一步深入研究。研究表明,在近似正直攝影條件下對攝影測量系統進行對比標定,對待標定攝影測量系統誤差進行表征,是客觀可行的。
5 總 結
該標定方法在大尺寸位移測量分析系統標定中得到應用,通過進行系統誤差分析,確定了影響系統精度的關鍵因素,誤差產生的原因,并對誤差公式的準確性進行了驗證。標定結果標明,標定結果符合誤差分析,驗證了誤差公式的準確性。該標定方法為該類型系統的標定提供了新的理論和方法,同時完善了實驗室標定方法,提高了實驗室標定的可操作性,填補了行業內的技術空缺,可以作為統一的規范或要求進行推廣。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
