變幾何進氣道吸氣式高超聲速飛行器控制系統(tǒng)設(shè)計*
2018-09-11 02:09:24蘇沛華
傳感器與微系統(tǒng) 2018年9期
蘇沛華, 毛 奇
(天津大學 電氣自動化與信息工程學院,天津 300072)
0 引 言
吸氣式高超聲速飛行器(airbreathing hypersonic vehicle,AHV)由于空間戰(zhàn)略優(yōu)勢、全球可達性等,引起了國內(nèi)外的廣泛關(guān)注[1,2]。在控制領(lǐng)域,如比例—積分—微分(proportional integral differential,PID)算法[2]、自適應(yīng)控制[3]、滑模控制[4]、模糊控制[6]等在高超聲速飛行器的控制算法上有了廣泛的應(yīng)用。然而,傳統(tǒng)的定幾何進氣道AHV(airbreathing hypersonic vehicle with fixed geometry inlet,AHV-FGI)是保證其在針設(shè)計點附近的性能,當運行馬赫(March)數(shù)較低時,產(chǎn)生“溢流”現(xiàn)象,使得發(fā)動機性能下降。
近年來,變幾何進氣道(variable geometry inlet,VGI)的研究取得了一定的進展。其通過改變進氣道的結(jié)構(gòu)來提高飛行器的運行性能,X—43A使用了一種旋轉(zhuǎn)唇罩式可移動唇罩[5],日本的Space and Astronautial Science 機構(gòu)針對ATREX引擎提出了一種對稱式VGI方案[6],美國學者提出了可調(diào)節(jié)中心錐式進氣道以提高超沖壓燃燒式發(fā)動機的非設(shè)計點性能[7]。盡管VGI的設(shè)計以及理論分析已經(jīng)取得了一系列的研究成果,但對AHV-VGI的控制設(shè)計仍處于起步階段。
法國ONERA機構(gòu)提出了一種VGI即通過沿著來流方向平移唇罩,從而提高飛行器的性能。本文主要針對該方案在控制設(shè)計方面展開研究。建立AHV-VGI的縱向模型,將AHV-VGI由于氣動力擬合引入的不確定性、由可移動唇罩引入的不確定性,以及其所受的外部擾動視為復(fù)合干擾,并使用模糊干擾觀測器(fuzzy disturbance observer,FDO) 進行觀測。并結(jié)合動態(tài)面控制(dynamic surface control,DSC)策略,實現(xiàn)了控制系統(tǒng)的設(shè)計。仿真結(jié)果表明AHV-VGI系統(tǒng)在控制方面更具優(yōu)勢。
1 AHV-VGI模型描述
1.1 可移動唇罩原理及數(shù)學模型
平移唇罩能夠?qū)崿F(xiàn)進氣道最大氣流捕獲的基本原理如圖1所示。當飛行器處于較低馬赫狀態(tài)時,若設(shè)有可移動唇罩且唇罩向前移動L1的距離,則可實現(xiàn)最大氣流捕獲。

圖1 可移動唇罩原理
由圖1可見,唇罩伸長距離L1為攻角α和激波角θs的函數(shù),而激波角θs是飛行馬赫數(shù)Ma與攻角α的函數(shù)。通過曲線擬合,結(jié)合文獻[10],可得到唇罩伸長量的解析表達式為
(1)
1.2 高超聲速飛行器數(shù)學模型
通用AHV剛性模型可以描述為
(2)
式中V,h,γ,θ,Q分別為飛行器的速度、高度、攻角、俯仰角和俯仰角速度;m,Iyy,gn分別為飛行器的質(zhì)量、轉(zhuǎn)動慣量和重力加速度;dV,dγ,dQ為未知外界干擾;L,D,T,M分別為升力、阻力、推力和俯仰力矩,且與唇罩伸長量有關(guān)。
將模型(2)轉(zhuǎn)換為如下嚴反饋形式
(3)

T·sinα/(mV)-gn·cosγ/V,

φ)]/Iyy,
Ωi=Δgi·φ+Δfi+(fli+Δfli)·+di


2 控制系統(tǒng)設(shè)計
系統(tǒng)控制結(jié)構(gòu)如圖2所示。
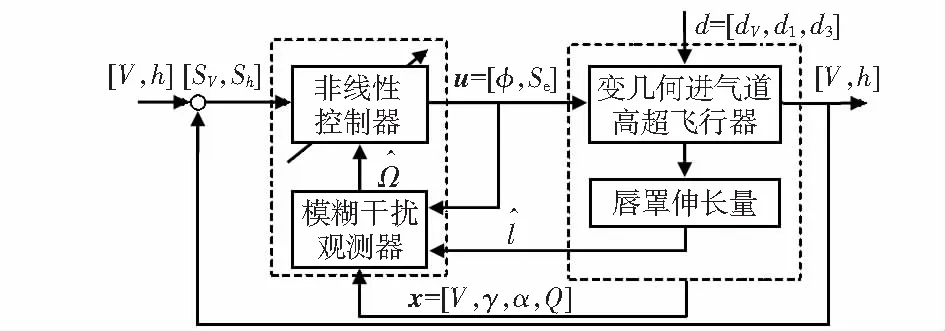
圖2 控制系統(tǒng)結(jié)構(gòu)
2.1 模糊干擾觀測器設(shè)計
模糊系統(tǒng)的輸出可表示為:y(x)=λTφ(x),x∈Rn和λ∈RN為參數(shù)向量,φ(x)為模糊基函數(shù)向量。由模型(3)設(shè)計FDO如下
(4)
式中zi(i=V,γ,Q)為觀測器狀態(tài)量,x=[V,γ,θ,Q],u=[φ,θ,Q,δe],uc=[φ,δe]。定義觀測誤差ζi=xi-zi。FDO的動力學方程表達如下
(5)

(6)
(7)
選擇合適的參數(shù)σi和μi2,可使F為負,干擾觀測誤差一致有界。
2.2 控制律設(shè)計
定義速度誤差面SV=V-Vd,并且使用FDO對復(fù)合干擾ΩV進行觀測,則速度子系統(tǒng)的實際控制量設(shè)計為
(8)
式中kV為待設(shè)計正數(shù)。
由模型(3)可知,可以將高度指令hd轉(zhuǎn)化為航跡角指令γd
(9)
式中kh>0為待設(shè)計正數(shù)。

(10)

(11)
定義誤差面Sθ=θ-θd,則控制律設(shè)計為
(12)

(13)
定義誤差面SQ=Q-Qd,使用FDO對ΩQ進行觀測,設(shè)計其實際控制量δe為
(14)
式中kQ為待設(shè)計正數(shù)。
2.3 穩(wěn)定性分析

選取Lyapunov函數(shù)W=WV+W1+W2+W3,其中
(15)
將WV求導(dǎo),考慮自適應(yīng)律(6),可得

≤-rVWV+mV
(16)

將W1求導(dǎo),可得

≤-r1W1+m1+SγgγSθ
(17)

(18)
類似地,將W2和W3求導(dǎo)可得
(19)
(20)

(21)
3 仿真驗證
初始速度取V=7 Ma,高度取h=75 000 ft(1 ft=0.304 8 m),速度和高度參考信號由阻尼為0.9、自然頻率為0.1 rad/s的二階參考模型給出。
控制器參數(shù)選取為kV=0.5,kh=1.2,kγ=5,kθ=0.2,kQ=1.3,η1=0.1,η2=0.1,μV1=μV2=1,μγ1=3,μγ2=2,μQ1=1.2,μQ2=1.5 。如圖3所示。
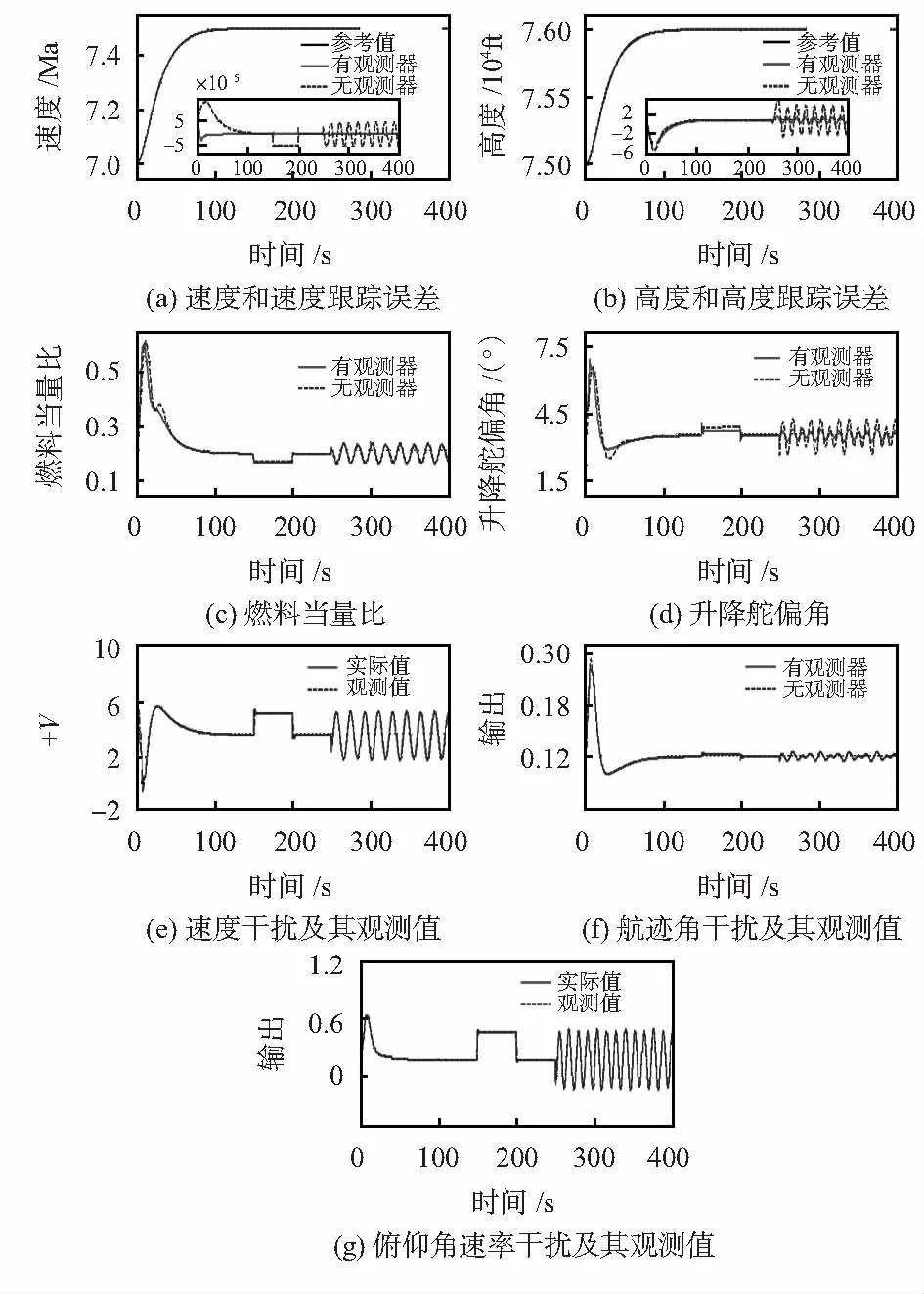
圖3 存在復(fù)合干擾時系統(tǒng)的仿真結(jié)果
情況1系統(tǒng)給定的參考指令為Vd=7.5 Ma。hd=76 000 ft。在150 s 仿真結(jié)果充分表明,F(xiàn)DO能夠?qū)HV-VGI系統(tǒng)中的復(fù)合擾動進行觀測,并在控制率中進行補償,因此可以獲得更高的速度和高度跟蹤精度。 情況2參考指令為Vd=9 Ma,hd=76 000 ft。 圖4給出了AHV-VGI與AHV-FGI對給定指令的跟蹤結(jié)果。該指令的速度、加速度較大,在加速階段,需要提供較大的推力使飛行器獲得足夠的加速度,因此,需要輸入較大的燃油比。AHV-VGI能夠通過改變可移動唇罩的伸長量實現(xiàn)最大氣流捕獲,從而以較小的燃油比提供所需的推力。AHV-FGI在加速階段因燃油比過大而使執(zhí)行機構(gòu)飽和(圖4(b)),影響飛行器推力的獲得(圖4(c)),從而影響AHV對給定指令的跟蹤精度(圖4(a))。因此,可移動唇罩式VGI能夠以較小代價,在很大程度上提高飛行器的控制性能,且能夠節(jié)省AHV燃料,對于運行周期較長的AHV具有重要的戰(zhàn)略意義。 圖4 AHV-VGI與AHV-FGI仿真結(jié)果 對AHV-VGI氣動力進行了擬合,建立其縱向模型。并針對AHV-FGI模型中存在的由唇罩引入的不確定性、氣動力擬合誤差以及外部擾動,設(shè)計了基于模糊觀測器的動態(tài)面控制策略,根據(jù)Lyapunov理論對系統(tǒng)的性能進行了分析。最后通過仿真實驗,驗證了該控制方案能夠克服AHV-FGI飛行中存在的復(fù)合干擾問題,實現(xiàn)有效控制,說明可移動唇罩式AHV-VGI在控制性能方面的優(yōu)勢。
4 結(jié) 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
