基于DSP的改進擾動觀察法光伏MPPT實現*
2018-09-11 02:09:24吳中山
傳感器與微系統 2018年9期
關鍵詞:系統
吳中山
(南京理工大學 自動化學院,江蘇 南京 210094)
0 引 言
光伏電池在應用中的轉換效率較低且價格昂貴,目前應用較普遍的光伏電池轉換效率約為10 %~20 %[1]。如果考慮后級逆變器轉換效率,那么整個光伏系統的利用效率將會更低。因此,如何充分利用光伏電池,成為了光伏的最大功率點跟蹤(maximum power point tracking,MPPT)解決的問題。國內外關于光伏MPPT的研究較多:研究光伏電池參數估計、研究擾動觀察法的改進、結合智能算法的MPPT等,但大多都停留在仿真階段,實現并實驗驗證并不多。
由于常規擾動觀察(perturbation and observation,P&O)法步長固定,存在動態跟蹤速度快和穩態跟蹤準確度高的矛盾[2]。對此,本文采用歸一化思想利用反正切函數提出一種變步長策略。設計了一種光伏MPPT系統并進行了實驗,實驗結果顯示:提出的方法能夠提高光伏電池的利用率,驗證了系統的可行性。
1 光伏電池數學模型
不同環境光伏電池的I-U近似特性表達式為[3]
(1)
式中C1,C2為常量參數,與標準條件下的短路電流、開路電壓、最大功率點電流、最大功率點電壓有關;ISC,UOC分別為標準條件下的短路電流、開路電壓;ΔU,ΔI為不同環境下的修正量,與光照強度和溫度有關。
2 MPPT原理及擾動觀察法的改進
2.1 MPPT電路原理
MPPT電路原理是[4]:當負載電阻值與電源內阻值相等時,負載上得到最大功率。但負載電阻值很難改變,且光伏電池的輸出特性表現為強非線性,即內阻值變化。可在中間加入一級直流轉直流(direct current to direct current,DC-DC)變換器,如圖1,此時等效負載電阻值為R'L,R'L與DC-DC的占空比有關,通過控制占空比改變等效電阻值,使其逼近電源內阻值,獲最大功率。

圖1 含DC-DC的電路
2.2 歸一化變步長擾動觀察法
圖2(a)為固定步長擾動觀察法[5]標準條件下功率曲線。注意到光伏電池功率曲線具有單峰特點,ΔP/ΔU與占空比的改變方向相同,當位于最大功率點左邊時符號為正,位于最大功率點右邊時符號為負。則本文占空比增量策略為
ΔD=A·2/π·arctan(ΔP/ΔU)
(2)
式中A為步長最大值,ΔP=P(i)-P(i-1),ΔU=U(i)-U(i-1)。
運用歸一化思想,借助反正切函數將占空比增量的值域歸一化到[-A,A]。運行過程中步長將在-A到A之間變化,不再是固定值,同時也限制了步長最大值為A。運用Simulink中S函數進行仿真該策略,A值與圖2 (a)的固定步長值相等,得標準條件下圖2(b)曲線,可以看出:改進算法能快速跟蹤到最大功率點,穩態后基本未出現振蕩。

圖2 擾動觀察法改進前后對比
3 系統實現
3.1 控制系統總體結構
為了能夠實現最大功率的輸出,數字信號處理器(digital signal processor,DSP)必須不斷地對光伏陣列輸出的電壓電流進行采樣,送入軟件控制算法計算后改變輸出的PWM占空比,從而控制Boost轉換電路。同時,DSP將采集到的實時數據通過RS—232不斷發送給PC存儲,以便后期繪制曲線和分析,掌握最大功率點的跟蹤情況。本系統硬件電路主要由4個部分組成,DSP控制電路、驅動電路、采樣電路、Boost電路。整體結構如圖3所示。

圖3 MPPT控制系統框圖
3.2 硬件設計
3.2.1 Boost電路
Boost電路如圖4所示,利用電感儲存的能量和電源一起向負載供電,從而達到升壓的目的。電感、電容值為[6]
(3)
式中D為占空比;Um,Im為光伏電池標準條件下最大功率點電壓和電流;r為紋波系數;f為脈寬調制(pulse width modulation,PWM)的頻率。
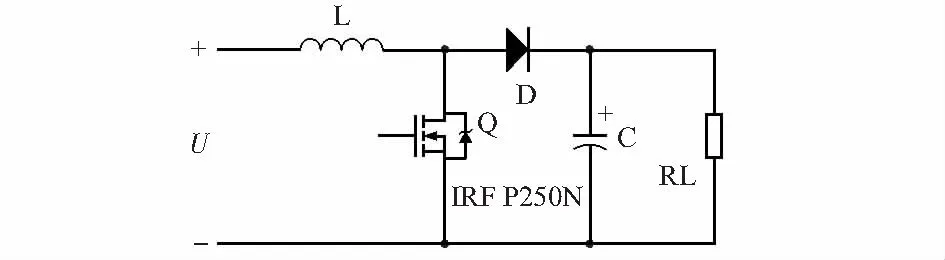
圖4 Boost電路結構
本文Um=18 V,Im=2.2 A,r=5 %,f=20 kHz。又系統后期給24 V蓄電池充電,D=(24-18)/24=0.25。可得,Lmin=1 mH,Cmin=18 μF,取電感值2 mH,電容值27 μF。
功率開關管選擇IRFP250N,其導通延時為25 ns,關斷延時為60 ns,響應快,額定電壓達到200 V。二極管選擇MUR3020PT,其反向擊穿電壓能達到200 V。
3.2.2 驅動電路
驅動電路由帶隔離光耦HCPL—3120組成,帶載能力強,常用于絕緣柵雙極晶體管(insulated gate bipolar translator,IGBT)的門級驅動。驅動電路原理如圖5所示。為了保證光耦有10 mA電流可靠導通,取R7=274 Ω,R9=10 Ω。

圖5 驅動電路
3.2.3 采樣電路
采樣電路如圖6,由霍爾電流傳感器(HBC—PS3.3)、電壓傳感器(HBV025A)和必要電路組成,用于測量光伏電池兩端輸出電壓電流,數據送入DSP處理。其中HBC—PS3.3的1引腳、HBV025A的3引腳接DSP的AD輸入引腳。

圖6 采樣電路
3.3 軟件設計
程序的流程如圖7所示,其中e為設置的一個閾值,為了避免接近最大功率后仍有振蕩。首先通過采樣電路檢測光伏陣列的輸出電壓電流,計算ΔP和ΔU;判斷ΔP的絕對值是否小于閾值e:若小于,則占空比不變;若大于,則按照式(2)計算占空比變化量,更新占空比。
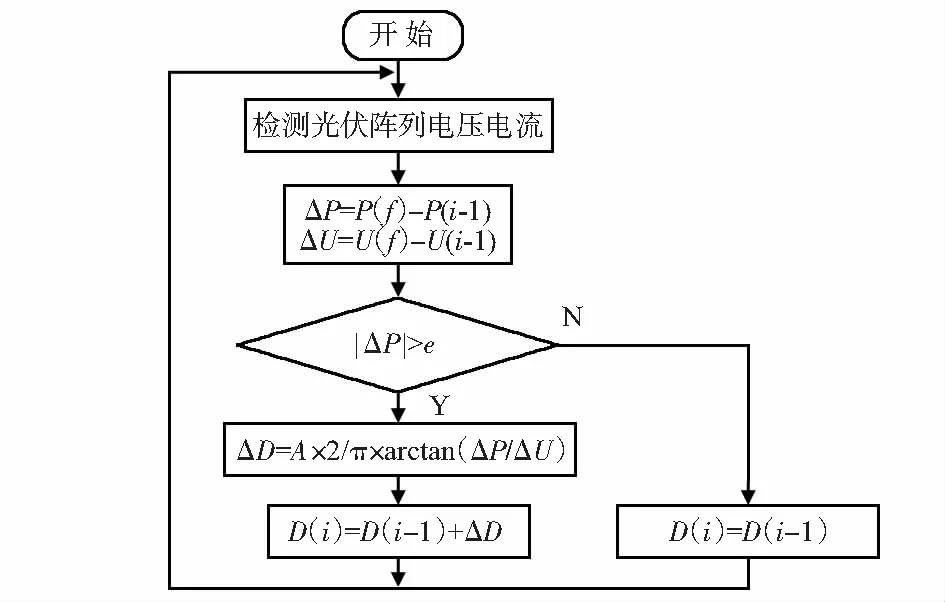
圖7 程序流程
按照流程基于TMS320F28335進行代碼開發。
4 實 驗
環境參數:太陽光照強度641 W/m2,溫度為29 ℃,在短時間內視為不變。采用Bosin型號為BX—F40W太陽能板,標準條件下參數為:UOC=22 V,ISC=2.37 A,Um=18 V,Im=2.2 A。負載為100 Ω的功率電阻器,采樣周期約為100 ms。
實驗得到2組數據,截取前面部分數據經過MATLAB繪制如圖8所示曲線,可以看出,采用了歸一化擾動觀察法的MPPT算法后太陽能板輸出了更多的功率,功率輸出約13.5 W,而將環境參數和太陽能板參數代入模型,可得到最大功率應該在14.5 W左右。其中損失的1 W功率主要是由于電路中開關管和二極管等的損耗。最后穩定的功率值仍有不超過0.5 W波動,原因是太陽光照強度是連續變化的,在短時間內也不是恒定的,從而引起輸出功率的變化。
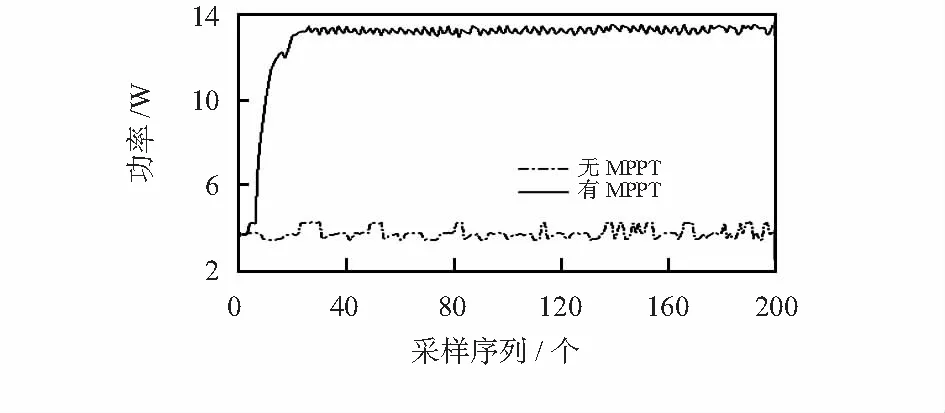
圖8 實驗數據曲線
5 結 論
本文研究了光伏電池MPPT的基本原理,在擾動觀察法基礎上提出了歸一化變步長策略。設計并實現了基于TMS320F28335的光伏MPPT系統。實驗結果驗證了系統的可行性。本文為光伏MPPT系統的實現提供了一種方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
