基于視覺導航的旋翼無人機自主降落系統
2018-09-11 02:09:24伊國興
傳感器與微系統 2018年9期
張 舸, 伊國興, 高 翔
(哈爾濱工業大學 空間控制與慣性技術研究中心,黑龍江 哈爾濱 150001)
0 引 言
目前無人機大多采用全球定位系統(global positioning system,GPS)和慣性組合導航[1~3],但由于GPS信號不穩定,且誤差較大,而慣性測量單元又容易造成誤差積累進而導致精度下降,均無法滿足無人機自主降落的精度要求。相比于慣性導航,視覺導航[4~6]能夠獲取外部環境的運動信息;相比于GPS導航,其具有更強的獨立性與抗干擾性能力;相比于激光測距系統,其具有更低的成本與較高的探測范圍,在系統配置上也更為靈活。因此視覺導航是無人機自主降落[7,8]的絕佳導航方式。
本文設計的視覺輔助無人機自主降落系統主要由相機、導航處理器和飛行控制器3部分組成。相機采集著陸區域的圖像信息,傳遞給導航處理器;導航處理器通過對圖像信息的解算,輸出無人機相對于著陸目標的位置和姿態,傳遞給飛行控制器;飛行控制器通過無人機與著陸目標的相對位姿計算期望的飛行速度向量并輸出相應的電機調速器驅動電壓向量,同時通過相機光軸與著陸目標中心的偏角對云臺進行姿態調整;螺旋槳轉速組合改變無人機的位置和姿態,進而影響相機的位姿,同時云臺角的改變也會影響相機的姿態,兩者共同影響相機視場,從而為導航處理器提供圖像信息更新,最終輔助無人機完成自主降落。
1 無人機位姿估計算法研究
1.1 坐標系定義
著陸目標坐標系Ow-XwYwZw如圖1所示,其原點為著陸目標的幾何中心。X軸與Y軸在著陸目標平面內且平行于矩形邊框,Z軸垂直于著陸目標平面向上。

圖1 著陸目標坐標系
相機坐標系Oc-XcYcZc的原點為相機光心。X軸與Y軸在相機平面內,X軸指向右方,Y軸指向下方,Z軸垂直于相機平面指向拍攝方向。
載體坐標系Ob-XbYbZb的原點為無人機的質心。X軸與Y軸位于水平面內,X軸指向無人機前進方向,Y軸指向無人機右方,Z軸垂直于水平面向下。
1.2 無人機位姿表示
用標定好的相機對著陸目標進行識別與校驗,可得到相機坐標系和著陸目標坐標系的相對位置和姿態信息。坐標變換可以通過一個旋轉矩陣S和一個平移矩陣T來表示
(1)
式中 (u,v)為該點的像素坐標,可通過圖像算法[9,10]得到;(Xc,Xc,Yc)T為該點在相機系的坐標,(Xw,Yw,Zw)T為該點在著陸目標系的坐標,可通過著陸目標的設計尺寸得到。λ=zc為該點在相機系上的Z坐標,為已知量。K為相機的內部參數,可通過相機標定得到。平移矩陣T為三維列向量,表示著陸目標坐標系原點在相機坐標系中的位置。因此,通過若干特征點的像素坐標(u,v)和著陸目標坐標(Xw,Yw,Zw)T求得平移矩陣T,即自主降落所需要的著陸目標位置。
對完成預處理的著陸目標圖像進行Harris角點檢測和輪廓檢測。如圖2所示,將檢測出的9個角點和9個圓心作為特征點,且特征點在著陸目標坐標系上的坐標已知,在圖像平面的像素坐標可以通過角點檢測獲取,因此,可以求得平移矩陣T。
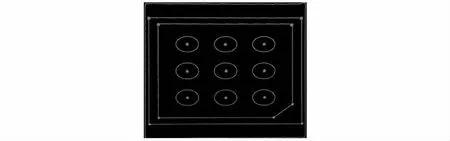
圖2 特征點位置
通過奇異值分解與最小二乘法得到T矩陣,即著陸目標坐標系的原點位于相機坐標系的三維坐標(xc,yc,zc)T。假設相機系與載體系原點距離較小可近似相等,則著陸目標在載體系中表示為(xb,yb,zb)T=(xc,yc,zc)T,因此,無人機相對于著陸目標的相對位置關系可表示為
(2)
式中θpt為云臺角。
2 自主降落控制算法研究
2.1 自主降落中的無人機控制
1)水平接近階段

2)垂直降落階段
自主降落控制器結構如圖3所示,通過與著陸目標的相對位置關系解算期望的飛行速度向量,經過一個飽和環節得到實際的速度給定,控制無人機飛往著陸目標地點。

圖3 自主降落控制器架構
2.1.1 位置與速度控制器設計
如圖4所示,位置與速度控制器由位置控制器和速度控制器兩部分構成,兩者均選擇GPS接收機和光流傳感器作為反饋信號源。

圖4 位置控制器結構
位置控制器通過反饋信號源獲取無人機的位置信息x,y,并根據位置給定,應用PID控制方法計算速度給定,并作為速度環的輸入。速度控制器通過反饋信號源獲取無人機的速度信息Vx,Vy,并根據位置環輸出的速度給定,應用PID控制方法計算姿態給定,并作為姿態控制器的輸入。
2.1.2 姿態控制器設計
如圖5所示,姿態控制器由內環、外環2個閉環構成。
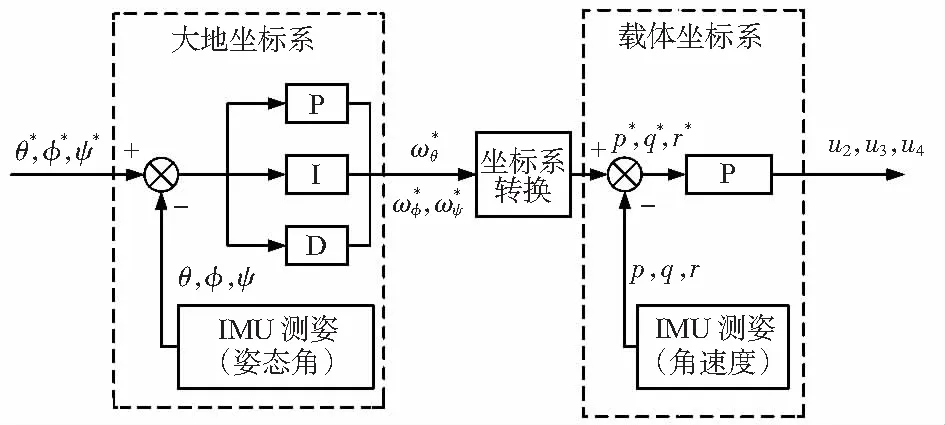
圖5 姿態控制器結構
內環為角速度控制環,采用P控制,基于載體坐標系,其反饋信號為陀螺儀角速度輸出p,q,r。外環為角度控制環,采用比例—積分—微分(proportional-integral-differential,PID)控制,基于大地坐標系,其姿態角采用歐拉角表示方法,因此內外環之間需要進行坐標轉換。
2.2 自主降落中的云臺控制
云臺控制器結構如圖6所示。控制器采用比例—微分控制(proportional-differential,PD)控制,以著陸目標偏離相機光軸的角度作為輸入量,輸出云臺轉動角速度,將角速度積分即可得到期望云臺角。當導航計算機接收到自主降落觸發信號,云臺控制器會把期望云臺角傳遞給飛行控制單元,進而實現視覺伺服跟蹤。

圖6 云臺控制器
2.3 自主降落模式設計2.3.1 定點目標地面站輔助降落模式
該模式下完成自主降落任務需要地面計算機進行導航解算并參與到控制回路中,其控制結構如圖7所示。

圖7 地面站輔助自主降落原理
相對位姿測量模塊從相機拍攝的圖像中提取著陸目標并計算相機—合作目標相對位姿,再由串口通信通過無線傳輸模塊傳輸給地面站。同時,飛行控制器將無人機當前北東地坐標、航向角以及云臺角傳輸到地面站。地面站綜合以上信息進行坐標運算,得到著陸目標的北東地坐標。當接收到遙控器的降落指令后,地面站將著陸目標當前坐標位置發送給飛行控制單元,由飛行控制單元對無人機進行位置控制,完成自主降落。此過程中,云臺角由遙控器給出。
地面站輔助自主降落模式通過地面站輔助,簡化了機載設備,減少了無人機能源消耗,提高了無人機續航時間,同時其輔助降落導航算法可以及時修改驗證,便于開發。但由于引入地面站的計算,整個控制回路會因為傳輸鏈路的時延而產生延遲,甚至會在無線通信過程中受到收發數據沖突的影響而導致導航指令無法接收,同時地面站的存在限制了無人機的自主性。
2.3.2 定點目標自主降落模式
該模式下完成自主降落任務無需地面站參與,而是通過機載導航處理器進行導航解算并參與到控制回路中,其控制結構如圖8所示。
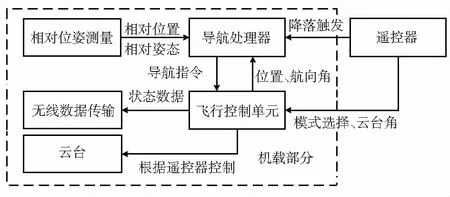
圖8 自主定點降落工作原理
機載設備中增加了導航處理器,導航處理器從相對位姿測量模塊獲取相機—著陸目標相對位姿,從飛行控制單元獲取無人機北東地坐標、航向角和云臺角,綜合二者的信息計算得到著陸目標的北東地坐標。當接收到遙控器的降落指令后,導航處理器將著陸目標當前坐標位置發送給飛行控制單元,由飛行控制單元對無人機進行位置控制,完成自主降落。此過程中,云臺角由遙控器給出。
機載導航處理自主降落模式消除了無線傳輸鏈路中的時延,極大改善了控制回路的性能;由于機載設備為全雙工通信,解決了數據沖突問題,提高了導航過程的可靠性;同時,嵌入式設備的使用使無人機脫離了地面站而獨立工作,提高了無人機的自主性。但由于無人機載荷有限,其計算能力亦非常有限,對于算法優化的要求較高;同時,由于視覺反饋只發生在自主降落過程2個階段開始的瞬間,導致其降落精度無法保證,也無法實現移動目標的跟蹤降落。
2.3.3 移動目標自主降落模式
為了實現高精度定點目標自主降落和移動目標自主降落,設計了圖9所示控制結構的降落模式。
該模式下自主降落導航流程與定點目標自主降落模式相同,但是相對于前者,該模式實現了飛行控制器對無人機的速度控制以及云臺對著陸目標的視覺跟蹤。速度控制器和云臺控制器如前所述,兩者結合可以實現高精度的無人機自主降落。該模式繼承了定點目標自主降落模式低時延、自主性強、可靠性高的優點,同時又克服了無法追蹤移動降落地點的缺點,有效減小了自主降落的誤差,提高了無人機自主降落精度。
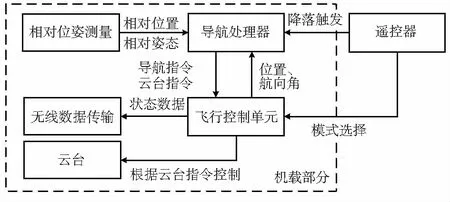
圖9 地面移動目標降落原理
3 自主降落系統驗證
3.1 降落過程的飛行狀態
為了驗證基于視覺導航的無人機自主降落系統,進行了無人機室外自主降落試驗。試驗中,無人機距離著陸目標較遠處起飛并調整位姿,飛往降落區域,然后發出自主降落指令,觀測無人機自主降落過程并記錄數據。試驗過程中無人機的飛行狀態如圖10所示。試驗過程中無人機與著陸目標的相對位置關系如圖11所示。
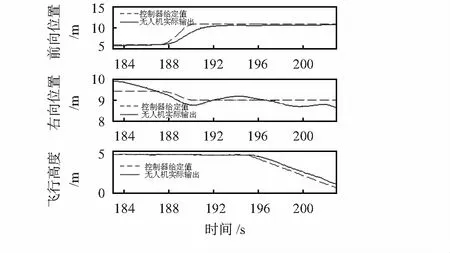
圖10 自主降落過程的位置與高度

圖11 與著陸目標的相對位置關系
187~192 s之間為水平接近階段。此階段無人機機載視覺系統會不斷計算、修正著陸目標的相對位置,并通過視覺反饋控制無人機飛往著陸目標上空。
195~203 s之間為垂直降落階段。無人機保持勻速下降,同時保持水平位置不變,直到無人機安全著陸。
通過試驗驗證,姿態控制器可以使無人機保持懸停狀態并保證俯仰角、橫滾角和偏航角的波動在1°以內。速度控制器可以使無人機的速度跟蹤誤差保持在±0.5 m/s以內。位置控制器可以使位置跟蹤誤差保持在±1 m以內。無人機降落過程基本符合設計構思,每個降落階段的實際效果均能滿足設計要求。
3.2 無人機自主降落精度
為了測量UAV在3種模式下自主降落的精度,分別進行試驗,如圖12所示。前2種模式降落精度均在著陸目標的1.5 m范圍內,第3種模式下的降落精度為0.5 m以內。

圖12 3種模式下降落精度對比
前2種模式下降落誤差較大的原因在于僅在187 s水平接近階段開始時和195 s垂直降落階段開始時使用視覺位置反饋信息,然而整個降落過程中的航向角誤差、相機安裝誤差等系統誤差無法實時修正,會逐漸累積,進而影響降落精度。第3種模式下由于采用云臺實時伺服追蹤,使相機光心實時追蹤著陸目標中心,并且通過視覺反饋采用速度控制,實現了高精度的無人機自主著陸。
4 結 論
在旋翼無人機自主降落問題上,本文提出了基于視覺導航的無人機自主降落系統,設計了基于針孔攝像機模型的無人機位姿估計算法,并得到了良好的導航效果。本文對無人機自主降落控制算法進行了研究,設計了視覺輔助自主降落過程和自主降落過程中的位姿控制器。本文創新性地提出了3種自主降落模式,在各模式下進行了無人機自主著陸試驗,并對其結果進行了詳細地分析,對于無人機自主著陸采用地面站輔助導航和機載導航方面有一定的參考價值。
